ΙΩΑΝΝΗΣ ΑΝΤΩΝΙΑΔΗΣ
ΚΑΘΗΓΗΤΗΣ
ΣΧΟΛΗ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΕΜΠ
Δυναμική και Έλεγχος Πτήσης

Δυναμική και Έλεγχος Πτήσης
Συγγραφή
Ιωάννης Αντωνιάδης
Κριτικός αναγνώστης
Γεώργιος Βοσνιάκος
Συντελεστές έκδοσης
Γλωσσικη επιμελεια: Παραδεισιώτης Ανδρέας
Γραφιστικη επιμελεια: Παραδεισιώτης Ανδρέας
Τεχνικη επεξεργασια: Παραδεισιώτης Ανδρέας
Copyright © ΣΕΑΒ, 2015
![]()
Το παρόν έργο αδειοδοτείται υπό τους όρους της άδειας Creative Commons Αναφορά Δημιουργού - Μη Εμπορική Χρήση - Όχι Παράγωγα Έργα 3.0. Για να δείτε ένα αντίγραφο της άδειας αυτής επισκεφτείτε τον ιστότοπο https://creativecommons.org/licenses/by-nc-nd/3.0/gr/
Σύνδεσμος Ελληνικων Ακαδημαϊκων Βιβλιοθηκών
Εθνικό Μετσόβιο Πολυτεχνείο
Ηρώων Πολυτεχνείου 9, 15780 Ζωγράφου
ISBN:978-960-603-139-7
Πρόλογος
• τη διαμόρφωση των δυναμικών χαρακτηριστικών του αεροσκάφους, και του τρόπου με τον οποίο αυτά επηρεάζουν τα χαρακτηριστικά πτήσης και τους χειρισμούς των πιλότων,
• τα αποδεκτά χαρακτηριστικά πτήσης και τον τρόπο με τον οποίο είναι δυνατό να βελτιωθούν τα μη αποδεκτά χαρακτηριστικά πτήσης.
Το βιβλίο αρχικά περιέχει τη θεωρία της στατικής ευστάθειας (αντιστάθμιση) του αεροσκάφους.
Στη συνέχεια αναλύεται η θεωρία της δυναμικής συμπεριφοράς του αεροσκάφους. Αυτή περιλαμβάνει την ανάπτυξη και την επίλυση των πλήρων εξισώσεων κίνησης, την απλοποιημένη τους μορφή για διαμήκη και εγκάρσια δυναμική και τη μελέτη της απόκρισης του αεροσκάφους στα πηδάλια ελέγχου με τον καθορισμό των συναρτήσεων μεταφοράς.
Έπειτα αναλύεται η σχέση των χαρακτηριστικών δυναμικής απόκρισης με τον τρόπο με τον οποίο ο πιλότος χειρίζεται το αεροσκάφος.
Τέλος, αναλύονται οι βασικοί τρόποι ελέγχου με ανάδραση, είτε αυτοί αφορούν συστήματα επαύξησης της δυναμικής ευστάθειας, είτε αφορούν συστήματα αυτόματης πλοήγησης ειδικών φάσεων της πτήσης («αυτόματοι πιλότοι»).
Στο σύγγραμμα περιέχονται εφαρμογές με αριθμητικές παραμέτρους από τη δυναμική ευρέως διαδεδομένων αεροσκαφών, καθώς και τεχνικά παραρτήματα με ουσιώδεις προαπαιτούμενες τεχνικές και επιστημονικές γνώσεις, όπως και αριθμητικά δεδομένα παραμέτρων από διαφόρους τύπους αεροσκαφών.
Κλείνοντας, θα ήθελα να ευχαριστήσω τον Υποψήφιο Διδάκτορα Ανδρέα Παραδεισιώτη για την τεχνική, γραφιστική και γλωσσική επιμέλεια του συγγράμματος, τον καθηγητή Μηχ. Μηχ. του ΕΜΠ κ. Γεώργιο Βοσνιάκο για τη συμβολή του ως κριτικός αναγνώστης, καθώς και τους ανθρώπους της Δράσης «Ελληνικά Ακαδημαϊκά Ηλεκτρονικά Συγγράμματα και Βοηθήματα», για τη βοήθεια και τη συνεργασία τους κατά τη διάρκεια της συγγραφής.
Προαπαιτούμενη γνώση (Γενικά)
Σε σχέση με το τεχνικό υπόβαθρο, απαιτούνται στοιχειώδεις γνώσεις σχετικές με τη βασική δομή και λειτουργία του αεροσκάφους. Σε σχέση με τις επιστήμες του Μηχανικού, απαιτούνται βασικές γνώσεις δυναμικής του στερεού σώματος και ταλαντώσεων, κύριες έννοιες αεροδυναμικής και μηχανικής των ρευστών, καθώς και στοιχειώδης θεωρία αυτομάτου ελέγχου. Όσον αφορά το μαθηματικό υπόβαθρο, είναι απαραίτητες τυπικές γνώσεις γραμμικής άλγεβρας και γεωμετρίας, καθώς και στοιχειώδεις έννοιες γραμμικών διαφορικών εξισώσεων.
1: ΕΙΣΑΓΩΓΗ
Σύνοψη
Παρατίθεται το υπόβαθρο βασικών γνώσεων που απαιτούνται για την κατανόηση και την περιγραφή της κίνησης και της δυναμικής ενός εν πτήσει τυπικού αεροσκάφους. Περιλαμβάνουν τη θεμελιώδη δομή και αεροδυναμική συμπεριφορά του αεροσκάφους, τις κύριες προϋποθέσεις και απαιτήσεις για τη δομή του και τις διάφορες φάσεις στις οποίες περιέρχεται κατά τη διάρκεια μιας πτήσης. Επίσης, περιγράφονται τα βασικά γεωμετρικά μεγέθη του αεροσκάφους και οι συμβολισμοί, υπό τα οποία καταστρώνονται οι εξισώσεις κίνησης και χρησιμοποιούνται κατά την έκταση του παρόντος συγγράμματος.
Προαπαιτούμενη γνώση
Σε επιστημονικό επίπεδο απαιτούνται βασικές ουσιώδεις γνώσεις μηχανικής ρευστών και αεροδυναμικής. Συμπληρωματικά, απαιτούνται έννοιες μηχανικής, δυναμικής και μαθηματικών σε στοιχειώδες επίπεδο. Τεχνικά απαιτούνται γνώσεις της δομής, των βασικών συνιστωσών και της λειτουργίας ενός τυπικού αεροσκάφους.
1. Βασικές έννοιες αεροδυναμικής και δυνάμεις στο αεροσκάφος
Η αεροδυναμική αποτελεί ένα από τα πεδία της μηχανικής των ρευστών και ασχολείται με την αλληλεπίδραση του αέρα κυρίως, με ένα κινούμενο σώμα. Το αεροσκάφος είναι μία τέτοια περίπτωση, καθώς εκμεταλλεύεται τη σχετική του κίνηση με την ατμόσφαιρα για να πετάξει. Σε αυτό το υποκεφάλαιο, μελετώνται τα φυσικά φαινόμενα και τα μέσα τα οποία χρησιμοποιούν οι μηχανικοί για την επίτευξη της πτήσης. Συγκεκριμένα, ακολουθεί αναφορά στις αεροτομές και τη βασική θεωρία γύρω από το θέμα, όπως και οι δυνάμεις οι οποίες ασκούνται σε ένα ιπτάμενο αεροσκάφος σε διάφορες καταστάσεις πτήσης (οριζόντια, ανοδική κ.ά.). Εν τέλει παρουσιάζονται οι παραδοχές και οι υποθέσεις υπό τις οποίες αναπτύσσεται το μεγαλύτερο μέρος της ανάλυσης στο υπόλοιπο σύγγραμμα.
1.1. Φυσική λειτουργία αεροτομής πτέρυγας
Η τομή μιας πτέρυγας από επίπεδο παράλληλο του επιπέδου συμμετρίας του αεροσκάφους, ονομάζεται αεροτομή (airfoil) πτέρυγας, όπως ορίζεται στο [1]. Υπό μια δισδιάστατη θεώρηση, η αεροτομή ορίζεται ως το γεωμετρικό σχήμα το οποίο όταν εκτίθεται σε ρεύμα αέρα, αναπτύσσει ανωστικές δυνάμεις, λόγω της ανισορροπίας στην κατανομή της πίεσης μεταξύ της πάνω και κάτω πλευράς του. Η χρησιμότητα αυτής της ιδιότητας χρίζει την αεροτομή ως καθοριστικό εργαλείο σε αμέτρητες εφαρμογές στη σύγχρονη βιομηχανία και την καθημερινή μας ζωή. Από τις πτέρυγες των αεροσκαφών και τις βαθμίδες των συμπιεστών μέχρι τον εξαερισμό κτιρίων και την άρδευση, η αεροτομή αποτελεί αναντικατάστατο κομμάτι στις πλείστες περιπτώσεις.
Μία απλοϊκή περιγραφή του τρόπου λειτουργίας, μπορεί να είναι η εξής: Η κυρτότητα της αεροτομής, «αναγκάζει» τη ροή να αποκτήσει μεγαλύτερη ταχύτητα στη μία πλευρά σε σχέση με την άλλη, ούτως ώστε, να διατηρηθεί η ενέργεια του ρευστού, καθώς έχει μεγαλύτερη απόσταση να διανύσει στην πλευρά αυτή. Αυτό το φαινόμενο περιγράφεται από την εξίσωση του Bernoulli:
|
|
|
(1.1) |
όπου
• Ε: ολική ενέργεια,
• V: ταχύτητα ροής,
• p: στατική πίεση,
• ρ: πυκνότητα,
• U: εσωτερική ενέργεια,
• g: επιτάχυνση βαρύτητας,
• z: υψομετρική διαφορά ή στάθμη.
Στην περίπτωση των αερίων και ειδικά στις συνθήκες πτήσης ενός αεροσκάφους, αμελείται η επίδραση της βαρύτητας και η εσωτερική ενέργεια. Πολλαπλασιάζοντας με την πυκνότητα, προκύπτει η έκφραση της ολικής πίεσης, ως το άθροισμα δυναμικής (Q) και στατικής (p) πίεσης:
|
|
|
(1.2) |
Επομένως, η διαφορά ταχύτητας μεταξύ άνω και κάτω επιφάνειας προκαλεί ανισορροπία της πίεσης μεταξύ των δύο πλευρών, η οποία δημιουργεί τη δύναμη της άνωσης. Ασφαλώς όμως, εφόσον η αεροτομή είναι ένα στερεό που αλληλεπιδρά με ρεύμα συνεκτικού ρευστού, είναι αναμενόμενη η ύπαρξη μίας δύναμης αντίστασης η οποία ονομάζεται οπισθέλκουσα. Οι δυνάμεις αυτές φαίνονται στο ακόλουθο σχήμα, όπως παρουσιάζεται στο [2]:
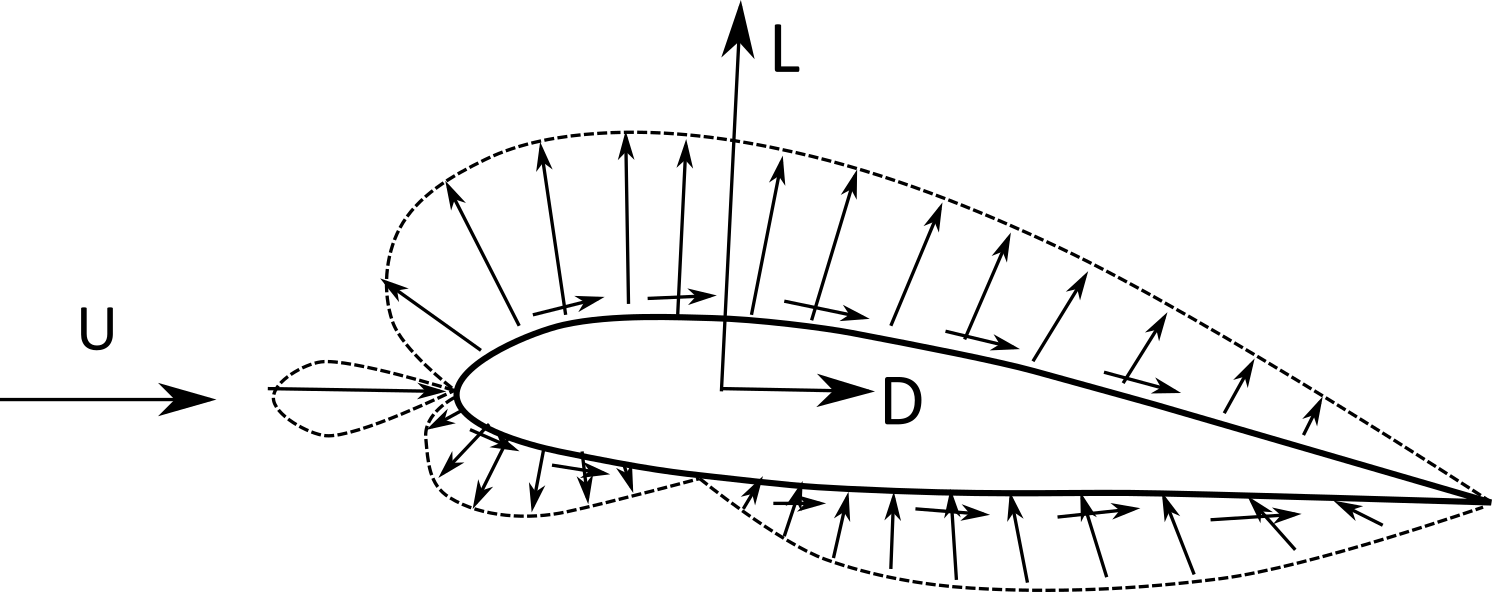
Σχήμα 1.1 Δυνάμεις και κατανομή πίεσης σε αεροτομή τοποθετημένη σε ρεύμα αέρα.
όπου
• L (Lift): δύναμη άνωσης ή άνωση,
• D (Drag): δύναμη αντίστασης ή οπισθέλκουσα,
• M (Moment): ροπή,
• U: ταχύτητα ροής.
Η δύναμη της οπισθέλκουσας έχει την ίδια διεύθυνση με την ταχύτητα της ροής, ενώ η άνωση είναι κάθετη στην οπισθέλκουσα.
Στο Σχήμα 1.2 παρουσιάζονται τα γεωμετρικά μεγέθη και η ορολογία που εμπλέκονται στην ανάλυση των αεροτομών.
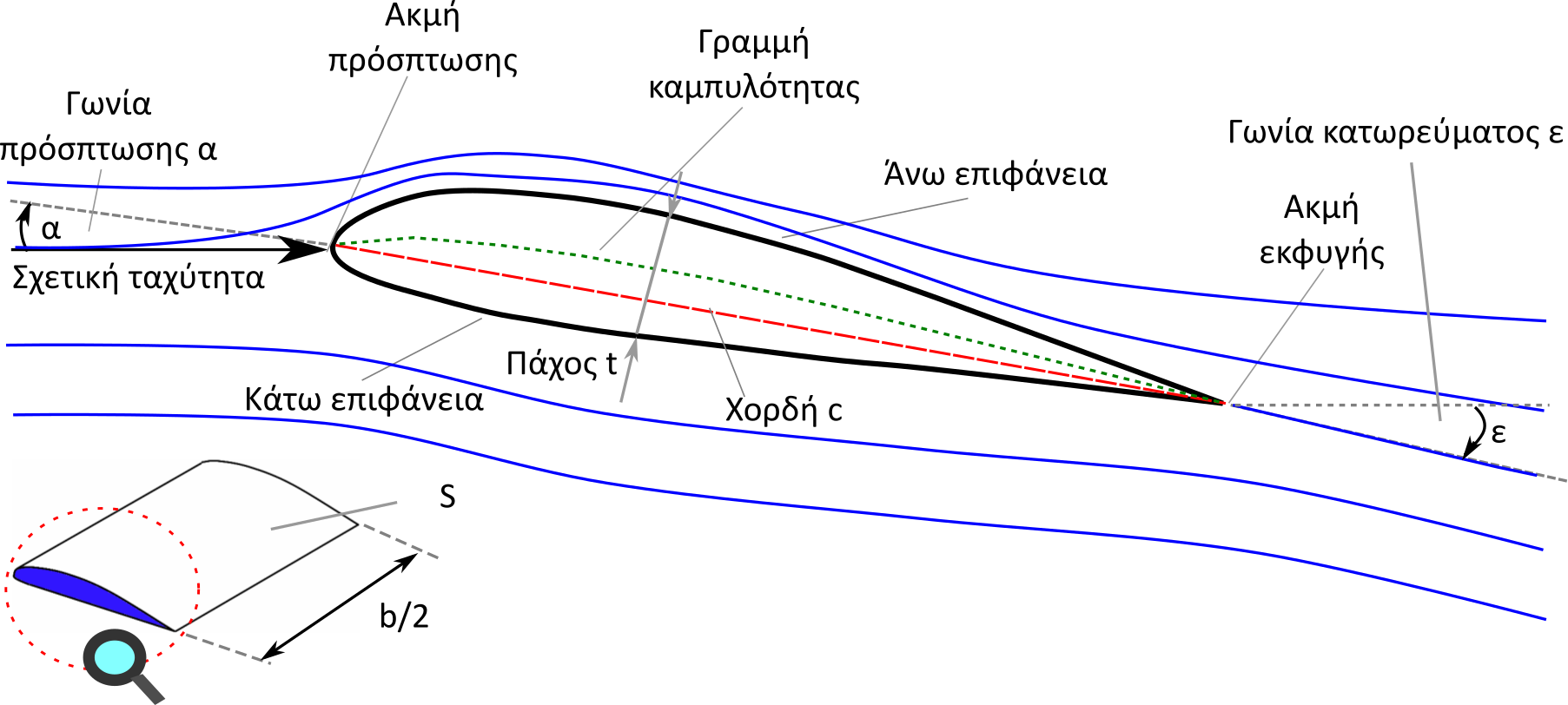
Σχήμα 1.2 Ορολογία αεροτομών.
Ο ορολογία αυτή έχει ως εξής:
• ακμή προσβολής ή πρόσπτωσης: το σημείο με τη μεγαλύτερη καμπυλότητα στο μπροστά μέρος της αεροτομής,
• ακμή εκφυγής: το σημείο με τη μεγαλύτερη καμπυλότητα στο πίσω μέρος της αεροτομής,
• χορδή (c): η ευθεία που ενώνει τις ακμές προσβολής και εκφυγής,
• μέση γραμμή ή γραμμή καμπυλότητας (camber line): ο γεωμετρικός τόπος των σημείων που ισαπέχουν από την πάνω και την κάτω επιφάνεια της αεροτομής,
• πάχος (t): η κατανομή του ποικίλει κατά μήκος της χορδής. Μετράται με δύο τρόπους, είτε κάθετα στη μέση γραμμή είτε κάθετα στη χορδή,
• άνω επιφάνεια ή επιφάνεια αναρρόφησης: γενικά η μέση ταχύτητα είναι μεγαλύτερη από αυτή της ροής, ενώ η στατική πίεση είναι μικρότερη,
• κάτω επιφάνεια ή επιφάνεια πίεσης: γενικά η μέση ταχύτητα είναι μικρότερη από αυτή της ροής, ενώ η στατική πίεση είναι μεγαλύτερη,
• γωνία πρόσπτωσης (α): η γωνία που σχηματίζει το διάνυσμα της ταχύτητας της ροής με τη χορδή,
• S: πτερυγική επιφάνεια,
• b: εκπέτασμα,
• γωνία κατωρεύματος (ε): η γωνία μεταξύ της διεύθυνσης της ελεύθερης ροής και της διεύθυνσης της ροής στην ακμή εκφυγής.
1.1.1. Χαρακτηριστικά απόδοσης αεροτομών – Συντελεστές Άνωσης, Αντίστασης, Ροπής
Για την περιγραφή των χαρακτηριστικών μιας αεροτομής, όπως για παράδειγμα την ικανότητα δημιουργίας άνωσης σε δεδομένο ρεύμα αέρα, θεσπίστηκαν συγκεκριμένοι συντελεστές οι οποίοι σχετίζονται με τη γεωμετρία της και μεταβάλλονται ανάλογα με τις διάφορες συνθήκες στις οποίες περιέρχεται η αεροτομή. Οι συντελεστές αυτοί είναι σε αδιάστατη μορφή και έτσι παρέχουν με απλό και εύχρηστο τρόπο τη δυνατότητα καταγραφής των αποδόσεων και της συμπεριφοράς μιας συγκεκριμένης αεροτομής για σκοπούς τυποποίησης, σύγκρισης ή έρευνας.
Οι συντελεστές αυτοί χρησιμοποιούν τη δυναμική πίεση Q, η οποία ορίζεται ως:
|
|
|
(1.3) |
Ουσιαστικά, η δυναμική πίεση Q αποτελεί μια έκφραση της κινητικής ενέργειας της ροής. Επιπλέον, χρησιμοποιούν βασικά γεωμετρικά χαρακτηριστικά του αεροσκάφους, όπως η επιφάνεια πτερύγων S και το μήκος χορδής της πτέρυγας c. Γενικά, οι αδιάστατοι συντελεστές που χρησιμοποιούνται στα πλαίσια του παρόντος συγγράμματος, αδιαστατοποιούνται με όμοιο τρόπο, ανάλογα με το αν χαρακτηρίζουν την αδιαστατοποίηση δυνάμεων ή ροπών.
Οι τρεις βασικότεροι συντελεστές είναι οι συντελεστές άνωσης, οπισθέλκουσας και ροπής, οι οποίοι ορίζονται στις εξισώσεις (1.4)-(1.6) αντίστοιχα.
|
|
|
(1.4) |
|
|
|
|
(1.5) |
|
|
|
|
(1.6) |
|
Επίσης, ορίζεται ο συντελεστής πίεσης:
|
|
|
(1.7) |
όπου ![]() ,
η ατμοσφαιρική πίεση.
,
η ατμοσφαιρική πίεση.
Τυπικά διαγράμματα της εξάρτησης των συντελεστών αυτών από τη γωνία πρόσπτωσης παρουσιάζονται στα σχήματα 1.3 και 1.4.

Σχήμα 1.3 Συντελεστές άνωσης και αντίστασης αεροτομής συναρτήσει της γωνίας πρόσπτωσης
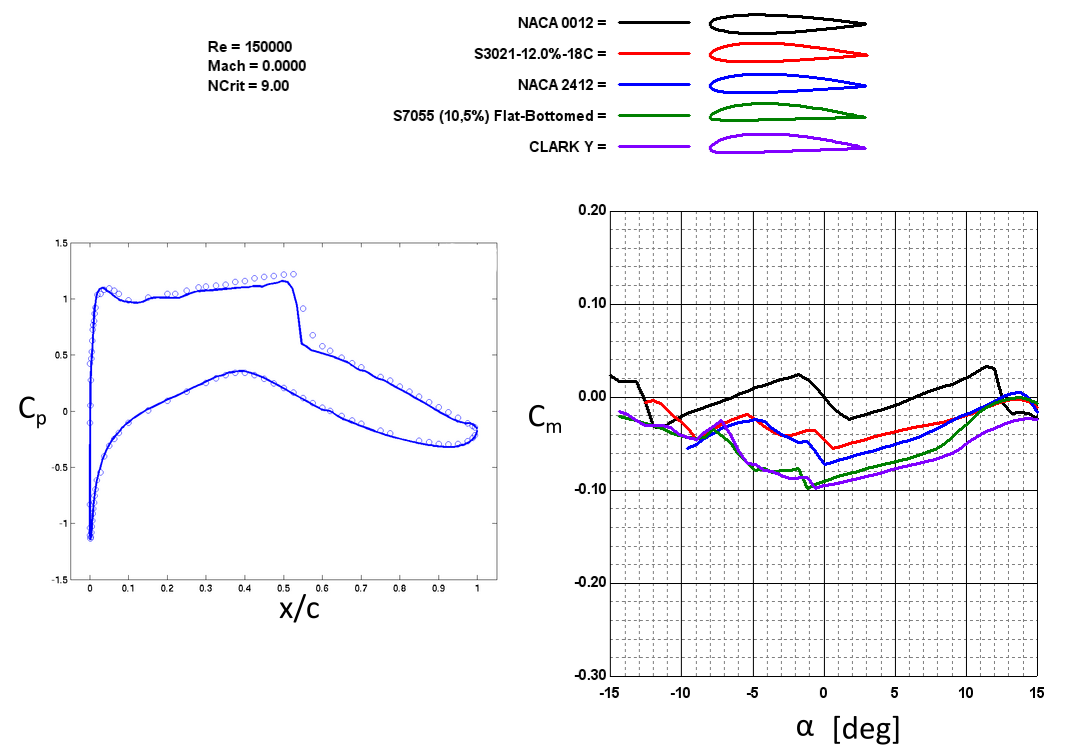
Σχήμα 1.4. Συντελεστές πίεσης και ροπής αεροτομής συναρτήσει της γωνίας πρόσπτωσης
Στην υποηχητική πτήση με την οποία και ασχολούμαστε, τα φαινόμενα συμπιεστότητας δεν είναι ιδιαίτερα έντονα και γενικά οι γωνίες πρόσπτωσης είναι μικρές. Γι’ αυτό συνήθως θεωρείται ότι η εξάρτηση του συντελεστή άνωσης από τη γωνία πρόσπτωσης, είναι γραμμική και εκφράζεται υπό τη μορφή:
|
|
|
(1.8) |
όπου
•
![]() :
κλίση καμπύλης άνωσης,
:
κλίση καμπύλης άνωσης,
• α0: γωνία πρόσπτωσης μηδενικής άνωσης.
Ο συντελεστής οπισθέλκουσας CD,συνδέεται με τον συντελεστή άνωσης CL, μέσω της σχέσης:
|
|
|
(1.9) |
όπου ο συντελεστής CDmin, αντιστοιχεί σε μηδενική άνωση και k είναι ένας συντελεστής που εξαρτάται κυρίως από τη γεωμετρία της πτέρυγας.
1.1.2. Αεροδυναμικά κέντρα αναφοράς
Τα αεροδυναμικά κέντρα αναφοράς ορίζονται ως σημεία της αεροτομής στα οποία ισχύουν συγκεκριμένες συνθήκες οποίες αφορούν τις δυνάμεις που ασκούνται στην αεροτομή. Τα σημεία αυτά χρησιμοποιούνται ως σημεία αναφοράς για διάφορες αναλύσεις, για τον καθορισμό γεωμετρικών μεγεθών κ.ά.
Σχήμα 1.5. Αεροδυναμικά κέντρα αναφοράς
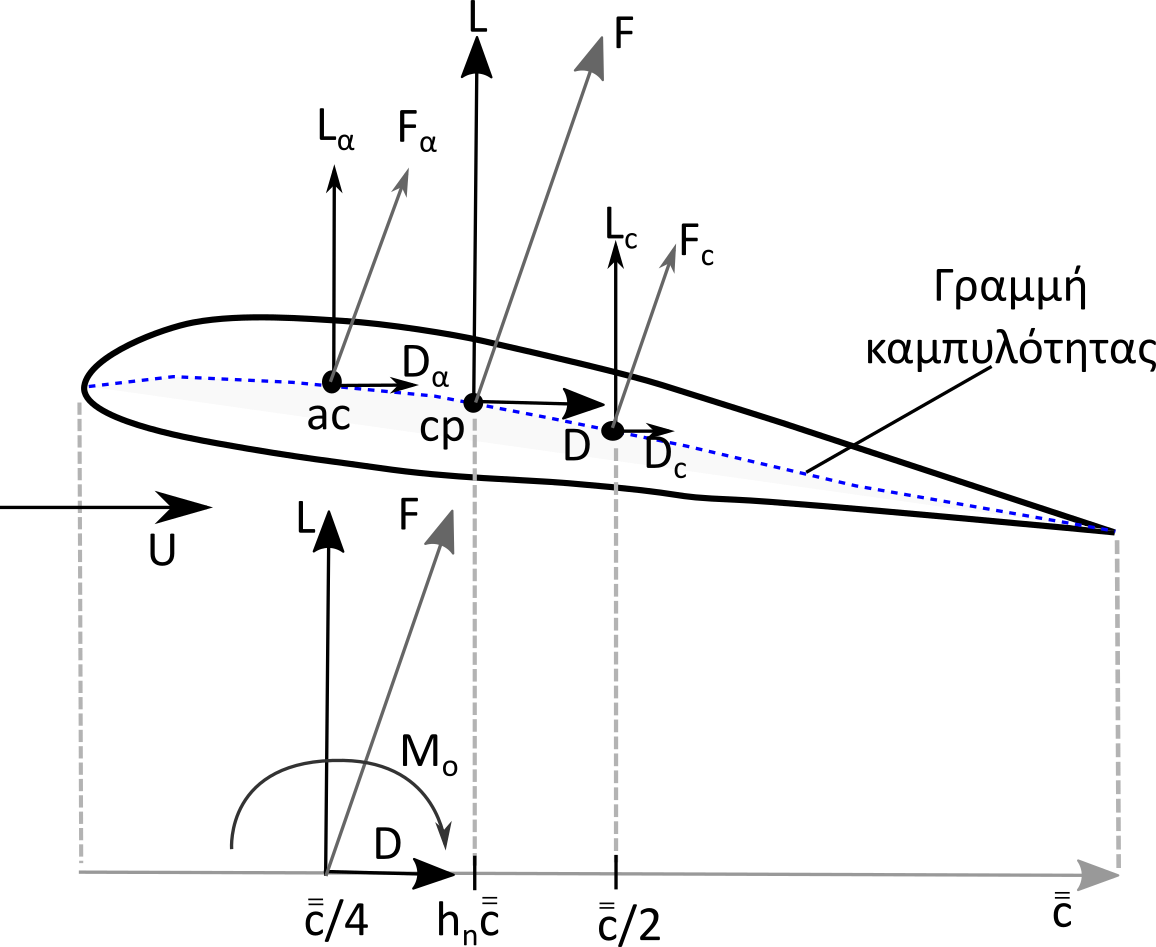
Δύο τέτοια σημεία, είναι το αεροδυναμικό κέντρο ac και το κέντρο πίεσης cp. Η συνισταμένη δύναμη F της άνωσης και της αντίστασης μπορεί να αναλυθεί σε δύο άλλες συνιστώσες, σύμφωνα με τον Cook [3]. Τη δύναμη λόγω καμπυλότητας της πτέρυγας Fc και τη δύναμη λόγω της γωνίας πρόσπτωσης Fα. Όπως φαίνεται και στο σχήμα (1.5), οι δύο αυτές δυνάμεις, μπορούν επίσης να αναλυθούν σε συνιστώσες άνωσης και αντίστασης, ενώ ισχύει:
|
|
|
(1.10) |
Η δύναμη λόγω καμπυλότητας Fc είναι σταθερή και εφαρμόζεται στο μέσο της χορδής, ενώ για συμμετρική αεροτομή, μηδενίζεται. Η δύναμη λόγω της γωνίας πρόσπτωσης Fα, εφαρμόζεται στο ¼ της χορδής.
Το αεροδυναμικό κέντρο ac, ορίζεται ως το σημείο ως προς το οποίο η ροπή Μ, είναι ανεξάρτητη της γωνίας πρόσπτωσης. Για χαμηλούς αριθμούς Mach βρίσκεται στο 25% της χορδής (c/4) ή πολύ κοντά σε αυτό.
Το κέντρο πίεσης cp, είναι το σημείο εφαρμογής της συνισταμένης δύναμης F και επομένως το σημείο στο οποίο μηδενίζεται η ροπή. Κινείται μεταξύ του αεροδυναμικού κέντρου και του μέσου της χορδής ανάλογα με τη γωνία πρόσπτωσης, με την ταχύτητα του ρεύματος του αέρα και με τη γεωμετρία της αεροτομής. Έτσι, για χαμηλές ταχύτητες και μεγάλες γωνίες πρόσπτωσης, το κέντρο πίεσης βρίσκεται πιο κοντά στο αεροδυναμικό κέντρο, ενώ για μεγάλες ταχύτητες και μικρές γωνίες πρόσπτωσης βρίσκεται πιο κοντά στο μέσο της χορδής. Η θέση του, δηλαδή, εξαρτάται από την αναλογία των Fc και Fa.
1.1.3. Κυκλοφορία και στρόβιλοι
Η διαφορά πίεσης που δημιουργείται μεταξύ της πάνω και κάτω επιφάνειας της αεροτομής προκαλεί την κυκλοφορία της ροής γύρω από την αεροτομή, όπως αναφέρει ο Crawford [4]. Η κυκλοφορία Γ, ορίζεται ως το επικαμπύλιο ολοκλήρωμα της ταχύτητας «περιμετρικά» της αεροτομής και η θετική φορά της φαίνεται στο σχήμα 1.6:
|
|
|
(1.11) |
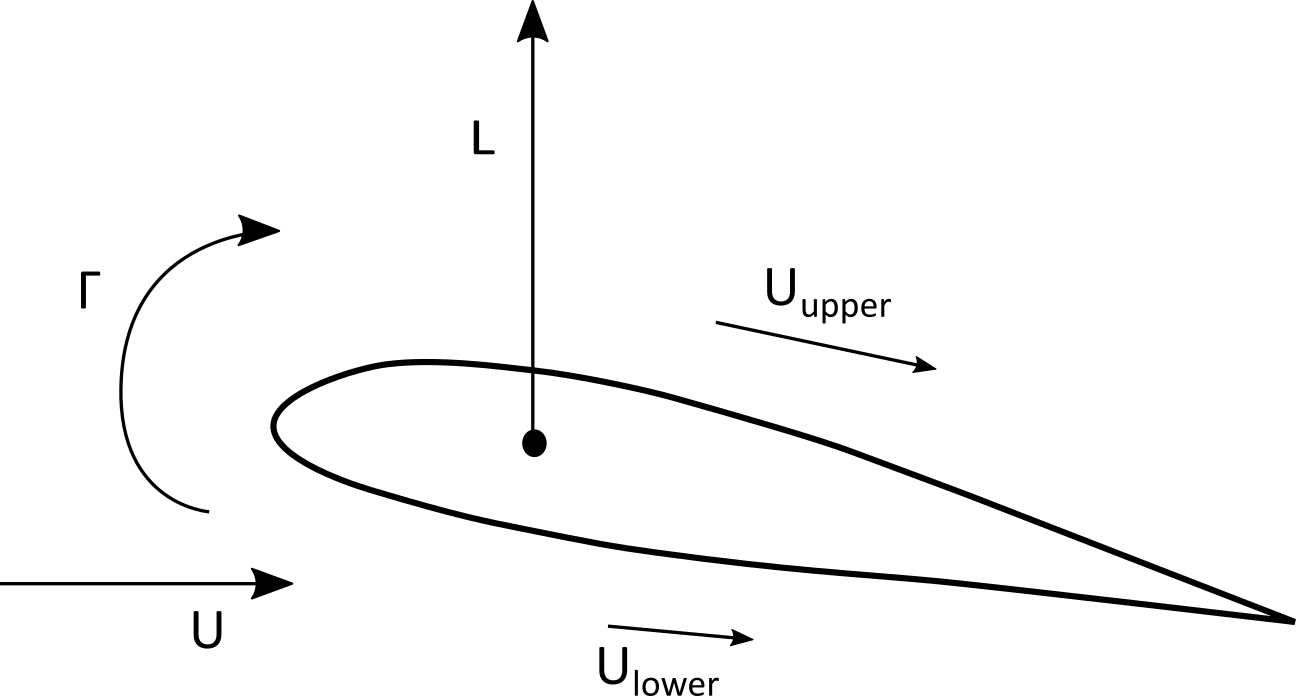
Σχήμα 1.6 Ορισμός της κυκλοφορίας
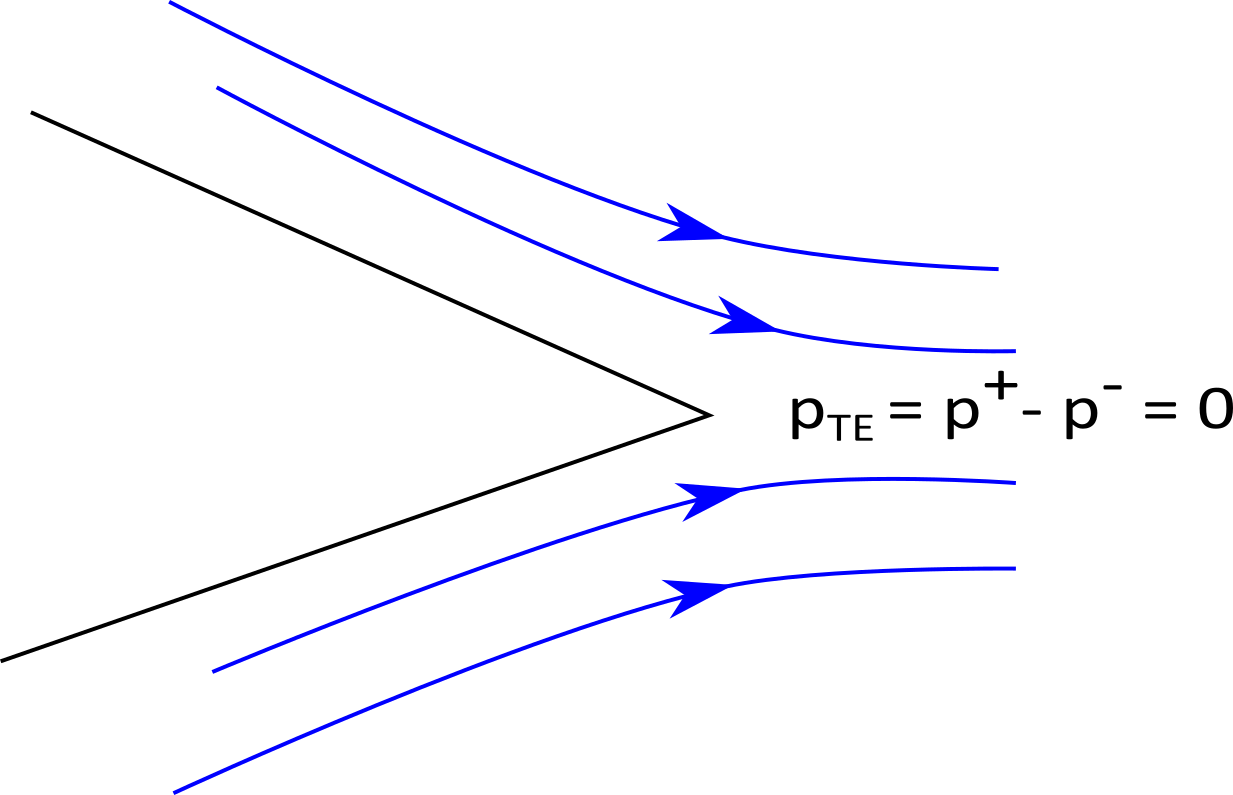
Η τιμή της κυκλοφορίας γύρω από την αεροτομή, ώστε η προκύπτουσα ροή να έχει φυσική υπόσταση, καθορίζεται από τη συνθήκη Kutta σύμφωνα με την οποία για μόνιμες συνθήκες ροής, η ροή στην ακμή εκφυγής πρέπει να είναι ομαλή. Δηλαδή στην ακμή εκφυγής η πίεση της πάνω επιφάνειας πρέπει να ισούται με την πίεση της κάτω επιφάνειας όπως δείχνει το σχήμα 1.7, όπου o δείκτης ΤΕ ορίζει την ακμή εκφυγής (Trailing Edge) .
Σχήμα 1.7 Συνθήκη Kutta στην ακμή εκφυγής
Σημείο ανακοπής, ορίζεται ως το σημείο στο οποίο η ταχύτητα μηδενίζεται. Τότε από την εξίσωση (1.1), συνεπάγεται ότι η ολική πίεση ισούται με τη στατική. Θεωρητικά, για μία αεροτομή σε μη-συνεκτικό πεδίο ροής, η μορφή των γραμμών ροής θα ήταν όπως στο σχήμα 1.8.(α). Η διαφορά πίεσης θα μετακινούσε το πίσω σημείο ανακοπής στην πάνω επιφάνεια της πτέρυγας. Στην πραγματικότητα όμως, λόγω της συνεκτικότητας του, ο αέρας δεν κάνει αυτή τη στροφή στην ακμή εκφυγής. Εφόσον εξ ορισμού η κυκλοφορία πρέπει να παραμένει σταθερή στην επιφάνεια ελέγχου του σχήματος 1.6, δημιουργείται ένας αντίθετος στρόβιλος, ο οριακός στρόβιλος (bound vortex). Έτσι, η ροή είναι ομαλή στην ακμή εκφυγής όπως ορίζει η συνθήκη Kutta και ο αρχικός στρόβιλος μετακινείται προς τα πίσω όπως δείχνει το σχήμα 1.8.(b). Τότε το πίσω σημείο ανακοπής βρίσκεται στην ακμή εκφυγής.
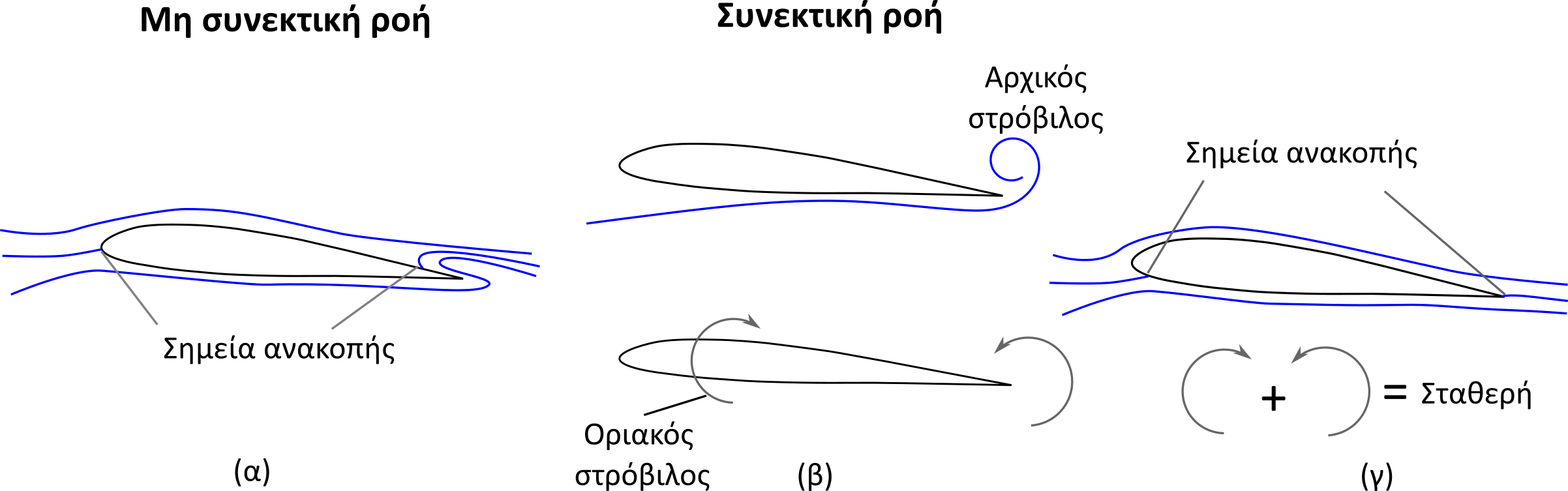
Σχήμα 1.8 Δημιουργία οριακού στροβίλου (α) Μη συνεκτική ροή (b) Πραγματική ροή (c) Σημεία ανακοπής
Υπό την υπόθεση μη-συνεκτικής ροής, σύμφωνα με το θεώρημα Kutta-Joukowski η σχέση μεταξύ της άνωσης που παράγει η πτέρυγα και της κυκλοφορίας προκύπτει:
|
|
|
(1.12) |
Η ανωτέρω ανάλυση αναφέρεται στις αεροτομές υπό μια δισδιάστατη οπτική. Σε μία πραγματική πτέρυγα όμως, το πεδίο ροής που σχηματίζεται όταν τοποθετηθεί σε ένα ρεύμα αέρα είναι πιο πολύπλοκο και έχει τρισδιάστατα χαρακτηριστικά. Εφόσον η πτέρυγα έχει πεπερασμένο εκπέτασμα, δεδομένης της διαφοράς πίεσης άνω και κάτω επιφάνειας και της τάσης της ροής να τις εξισώσει, στο άκρο της δημιουργείται ο στρόβιλος της κορυφής εκφυγής (trailing tip vortex).
Αυτός ο στρόβιλος, είναι συνάρτηση της κυκλοφορίας και εξασθενεί πίσω από την πτέρυγα λόγω της συνεκτικότητας και της τύρβης.
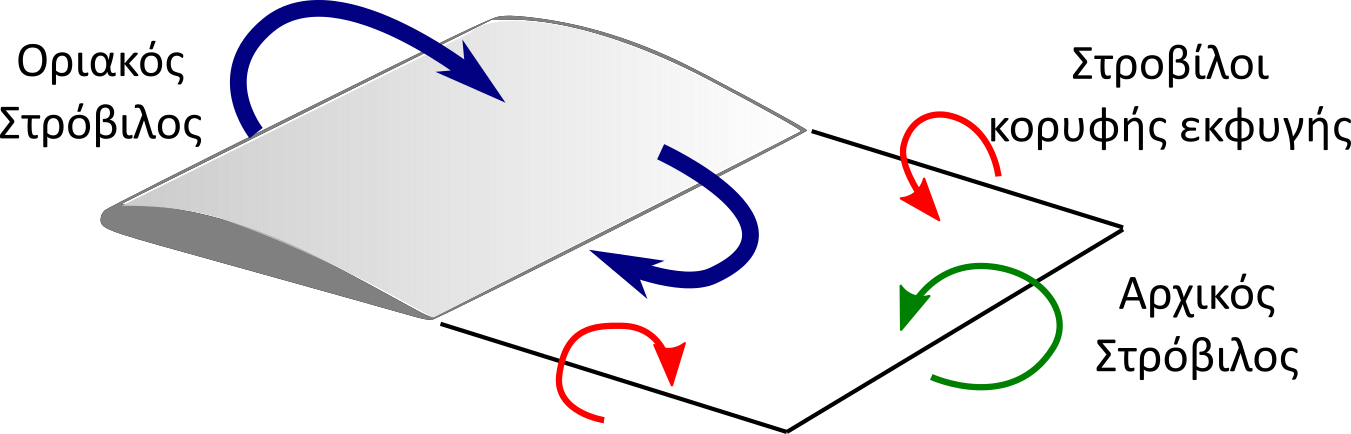
Σχήμα 1.9 Δημιουργία των στροβίλων των ακμών εκφυγής
1.1.4 Γωνία κατωρεύματος (downwash angle)
Κατ’ αρχήν πρέπει να οριστούν οι έννοιες ανώρευμα και κατώρευμα. Όπως αναλύθηκε στην εισαγωγή του υποκεφαλαίου 1.1, η λειτουργία της πτέρυγας βασίζεται ουσιαστικά στη δημιουργία άνωσης εκτρέποντας το ελεύθερο ρεύμα του αέρα. Η παρεμβολή της πτέρυγας προκαλεί μεταβολή της ταχύτητας του αέρα σε σχέση με την ταχύτητα του ελεύθερου ρεύματος.
Ποιοτικά, όπως παριστάνεται στα σχήματα 1.2 και 1.8, η φυσική λειτουργία της αεροτομής διαχωρίζει το πεδίο ροής στην πάνω και κάτω επιφάνεια της αεροτομής με το σημείο ανακοπής ως αναφορά, σύμφωνα με το [4].
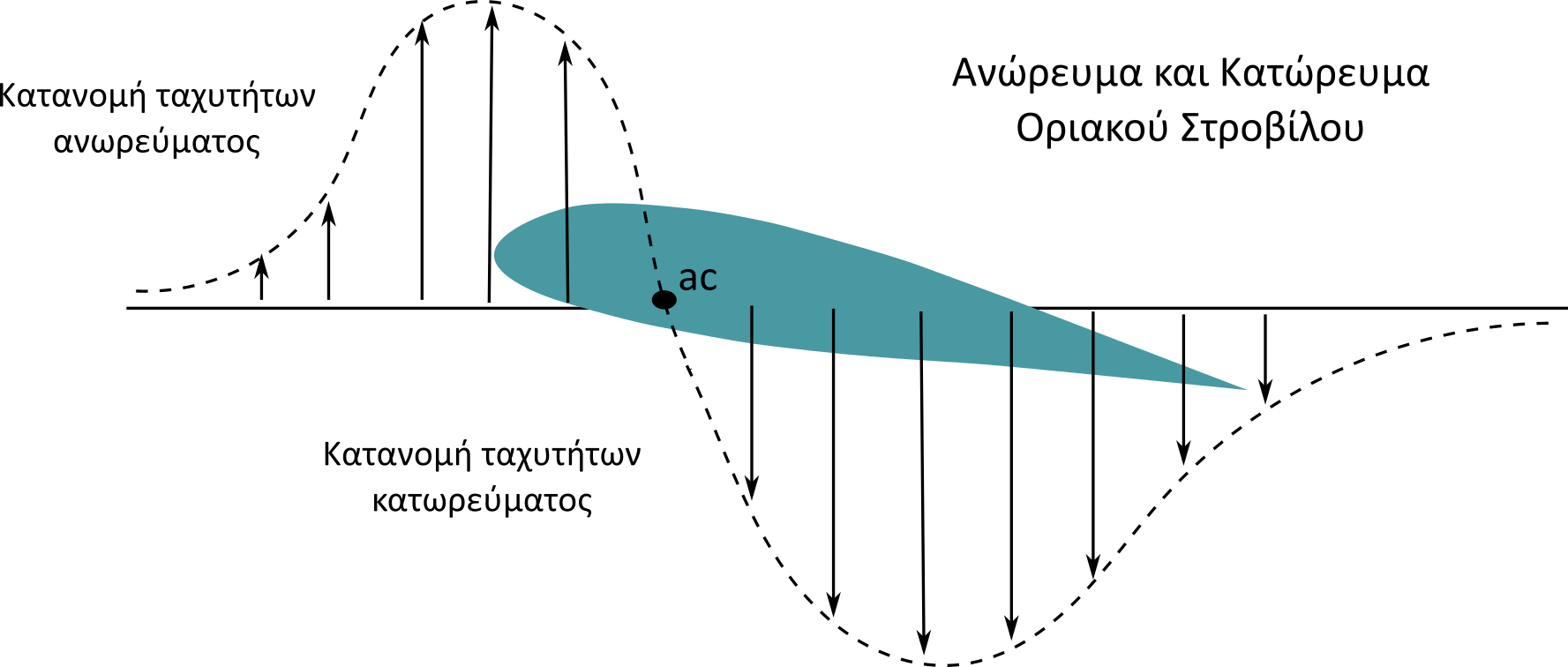
Σχήμα 1.10 Κατανομή ταχυτήτων οριακού στροβίλου σε ανώρευμα/κατώρευμα
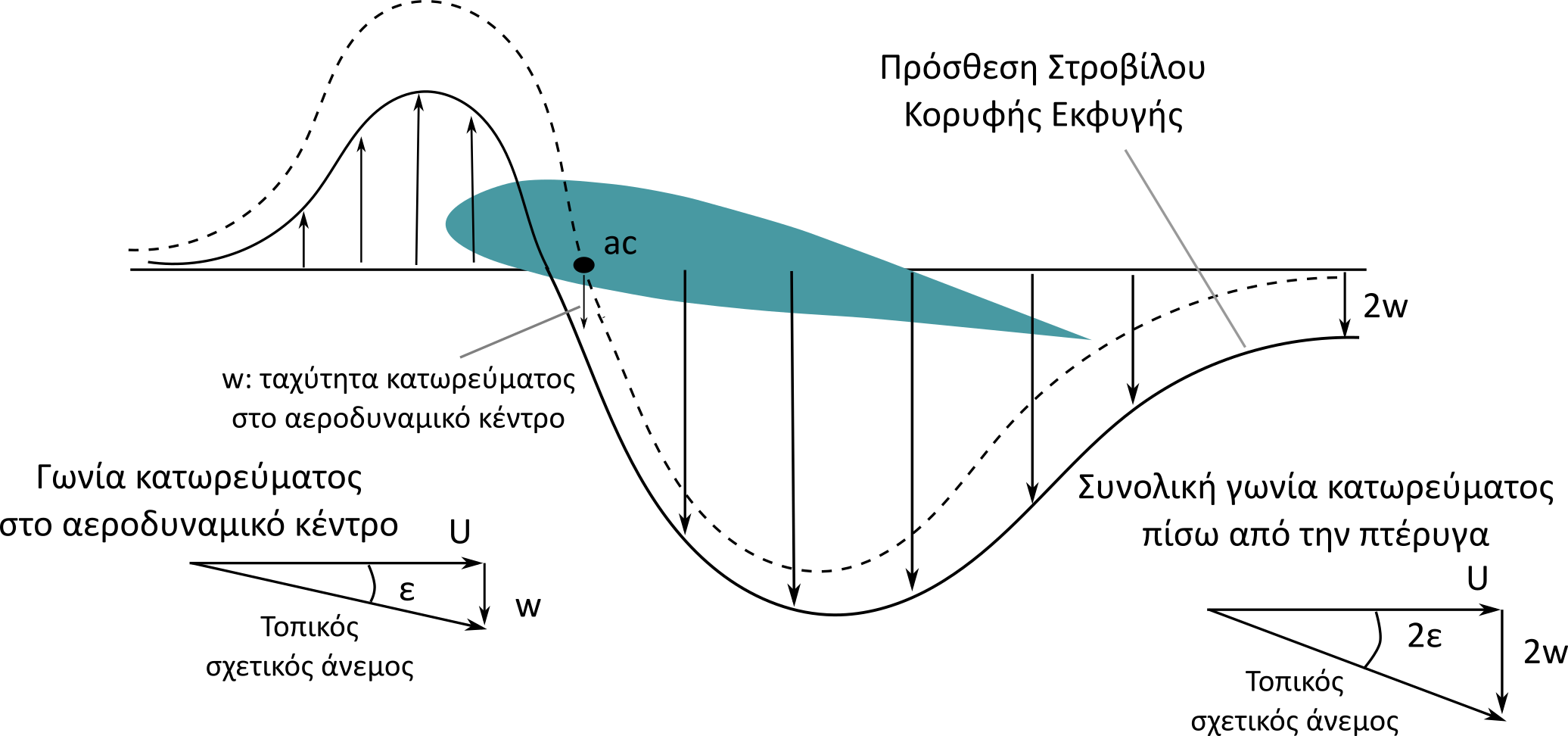
Σχήμα 1.11 Κατανομή ταχυτήτων σε ανώρευμα/κατώρευμα. Πρόσθετη επίδραση στροβίλων κορυφών εκφυγής
Απομονώνοντας μόνο την επίδραση του οριακού στροβίλου στο κατώρευμα, η οποία είναι και η σημαντικότερη, η γραφική απεικόνιση των ταχυτήτων ως απόρροια αυτού του διαχωρισμού φαίνεται στο σχήμα 1.10, επιβάλλοντας το διαχωρισμό τους σε δύο περιοχές, χαρακτηριζόμενες αντίστοιχα ως ανώρευμα και κατώρευμα, ανάλογα με τη φορά της ταχύτητας. Η μετάβαση μεταξύ των δύο ρευμάτων, γίνεται στο αεροδυναμικό κέντρο της αεροτομής.
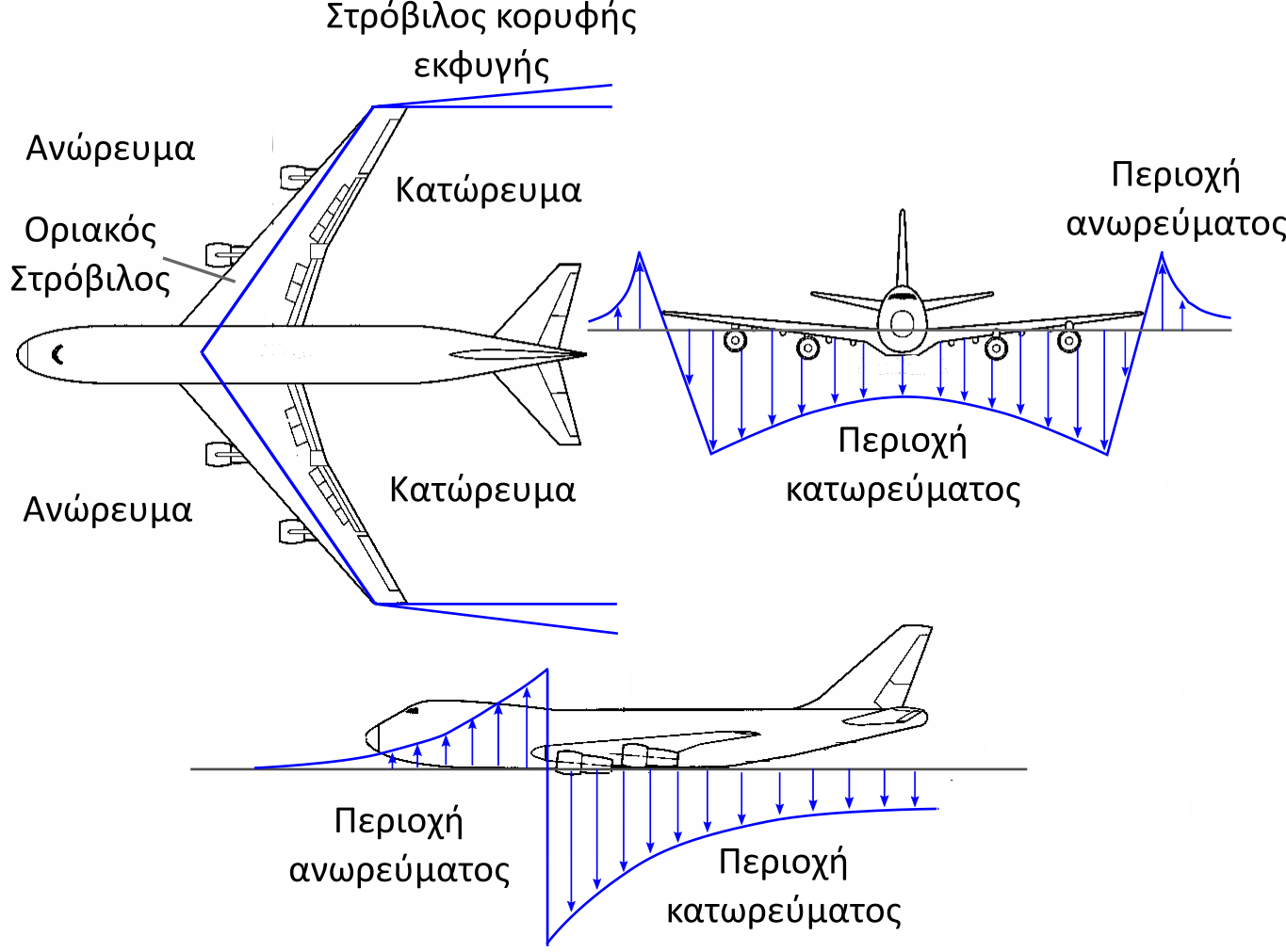
Σχήμα 1.12 Φαινόμενα ανωρεύματος/κατωρεύματος σε τρισδιάστατη πτέρυγα
Η πρόσθετη επίδραση του στροβίλου της ακμής εκφυγής φαίνεται στο σχ. 1.11. Η παράσταση των φαινομένων του ανωρεύματος και του κατωρεύματος στις τρεις διαστάσεις, όπως την παρουσιάζει ο Nelson [5], φαίνεται στο σχ. 1.12.
Η γωνία κατωρεύματος επηρεάζει τη γωνία πρόσπτωσης της πτέρυγας, καθώς η μέση σχετική ταχύτητα του ανέμου που χρησιμοποιείται για τη δημιουργία της άνωσης αλλάζει διεύθυνση. Η γωνία πρόσπτωσης αποτελείται από το άθροισμα της τοπικής γωνίας πρόσπτωσης iw και της προκύπτουσας γωνίας πρόσπτωσης αFRL που αντιστοιχεί με τη γωνία κατωρεύματος. Περαιτέρω ανάλυση παρουσιάζεται στο υποκεφάλαιο 2.1, του κεφαλαίου 2.
Για ένα πρόχειρο υπολογισμό της γωνίας κατωρεύματος ε, εφαρμόζεται η θεωρία του δίσκου ορμής. Μία συνήθης, απλοποιημένη μορφή της θεωρίας που εμπλέκει τη γωνία αυτή είναι η εξής:
Θεωρείται ένας κυλινδρικός όγκος ελέγχου με διάμετρο το εκπέτασμα της πτέρυγας, b. Η ταχύτητα της ελεύθερης ροής ορίζεται ως V. Η εκτροπή της διεύθυνσης της ροής λόγω κατωρεύματος δημιουργεί μια κατακόρυφη συνιστώσα της ταχύτητας w. Υποτίθεται ότι η αντίσταση D είναι μικρή και άρα η συνολική δύναμη που ασκείται στην πτέρυγα F, ισούται περίπου με την άνωση L. Επίσης, υποτίθεται σχετικά μικρή τη γωνία κατωρεύματος (ε < 10°).
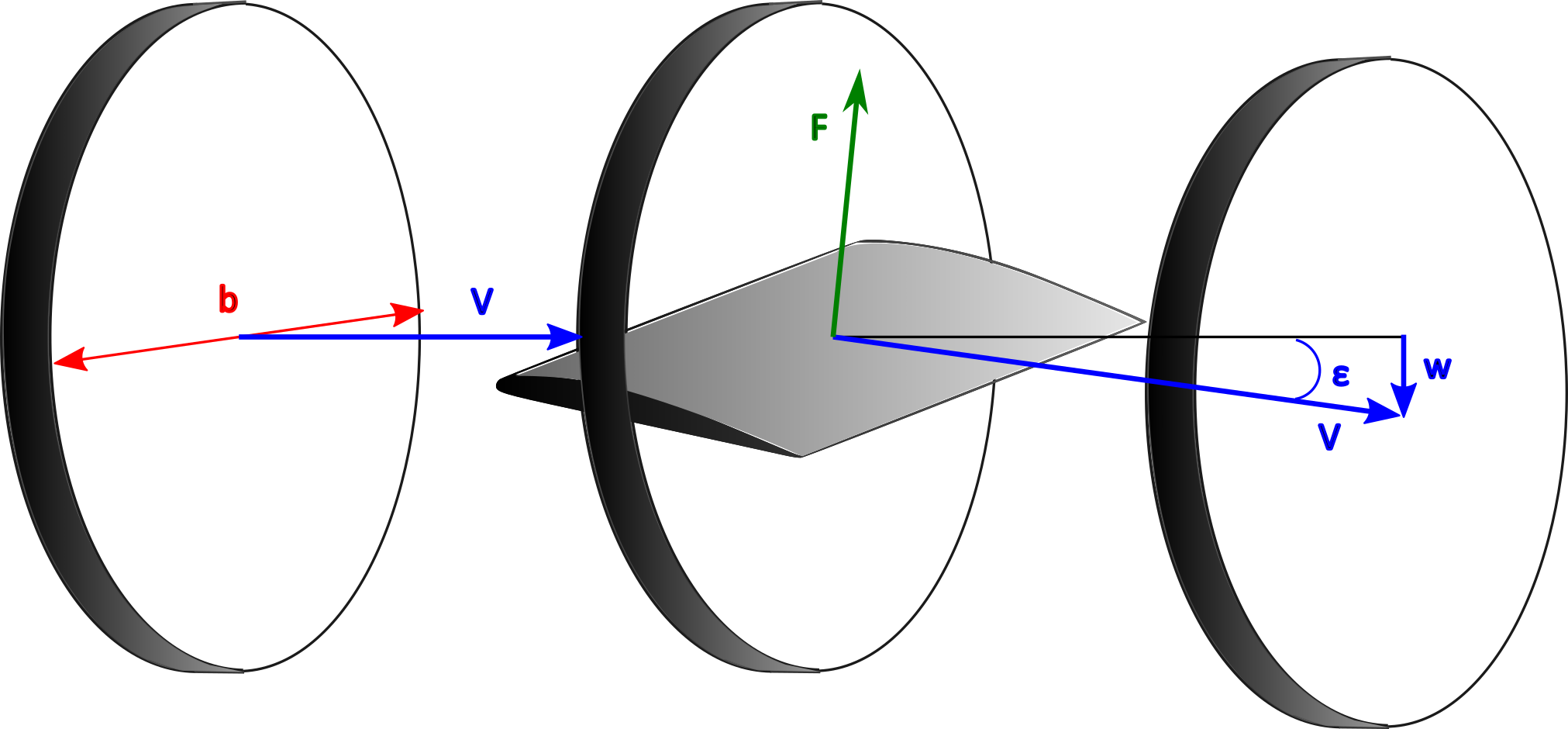
Σχήμα 1.13 Θεωρία δίσκου ορμής στην πτέρυγα
Η δύναμη F ισούται με την παράγωγο της ορμής:
|
|
|
(1.13) |
Αν η w θεωρηθεί σταθερή, προκύπτει:
|
|
|
(1.14) |
Όταν στο δεξί μέλος της εξίσωσης (1.13) αντικατασταθούν οι
εκφράσεις στην αγκύλη της εξίσωσης (1.14), λαμβάνοντας υπόψη ότι η δύναμη F είναι ουσιαστικά η άνωση L,
λόγω της μικρής αντίστασης (![]() )
και ορίζοντας ως ΑR τον λόγο
επιμήκους της πτέρυγας, τότε προκύπτει η γωνία κατωρεύματος ως εξής:
)
και ορίζοντας ως ΑR τον λόγο
επιμήκους της πτέρυγας, τότε προκύπτει η γωνία κατωρεύματος ως εξής:
|
|
|
(1.15) |
1.2. Δυνάμεις στο αεροσκάφος
Βασικό θεμέλιο της μηχανικής και της δυναμικής του αεροσκάφους και της όποιας σχετικής ανάλυσης, αποτελεί η αναγνώριση των βασικών ασκούμενων δυνάμεων στο αεροσκάφος και η διατύπωση των εξισώσεων ισορροπίας. Στην περίπτωση του αεροσκάφους αυτή η διατύπωση μεταβάλλεται ανάλογα με την κατάσταση πτήσης του αεροσκάφους. Οι βασικές καταστάσεις πτήσης που θα θεωρηθούν, όπως καταγράφονται από τους Etkin & Reid [6], αποτελούν τις διάφορες περιπτώσεις πτήσης σταθερής ταχύτητας (οριζόντια, ανοδική ή καθοδική), επιταχυνόμενη κίνηση και περιστροφή.
Σε όλες αυτές τις περιπτώσεις, οι παρακάτω τέσσερις δυνάμεις είναι κοινές:
• Η άνωση (L): παράγεται κατά την κίνηση του αεροσκάφους από τις αεροδυναμικά διαμορφωμένες συνιστώσες του αεροσκάφους (κυρίως από την πτέρυγα).
• Το βάρος (W-Weight): η δύναμη της βαρύτητας με φορά προς τη γη.
• Η ώση (T-Thrust): η δύναμη που ασκούν οι κινητήρες του αεροσκάφους.
• Η οπισθέλκουσα (D): η δύναμη που αντιτίθεται στην κίνηση του αεροσκάφους. Είναι δηλαδή αντίθετη της ώσης και κάθετη με την άνωση.
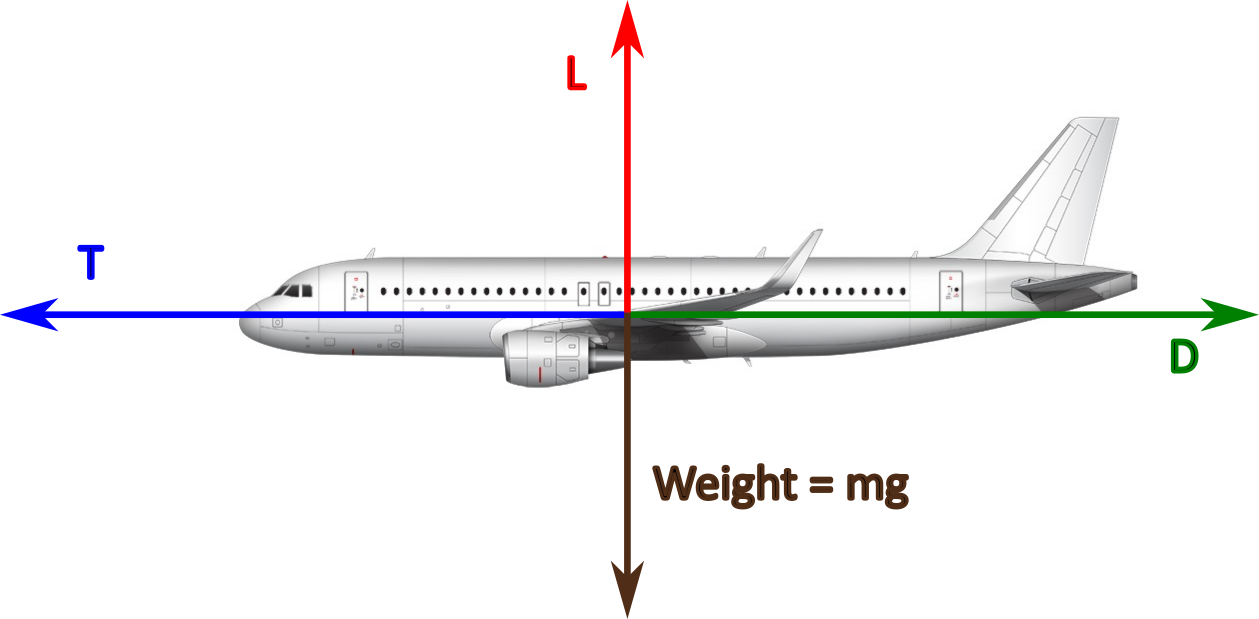
Σχήμα 1.14 Οι βασικές δυνάμεις που ασκούνται στο αεροσκάφος
1.2.1. Οριζόντια πτήση με σταθερή ταχύτητα (steady – level flight)
Στην οριζόντια πτήση, το αεροσκάφος πετά σε σταθερό ύψος. Αυτό συνεπάγεται ότι το μέτρο της δύναμης άνωσης L ισούται με το μέτρο της δύναμης της βαρύτητας και το μέτρο της οπισθέλκουσας D ισούται με το μέτρο της ώσης T του κινητήρα:
|
|
|
(1.16) |
Από τις σχέσεις (1.16) σε συνδυασμό με τις σχέσεις (1.8), (1.9) προκύπτουν τα εξής βασικά συμπεράσματα:
• Η ταχύτητα του αεροσκάφους είναι αντιστρόφως ανάλογη της τετραγωνικής ρίζας του συντελεστή άνωσης.
|
|
|
(1.17) |
• To αεροσκάφος πρέπει να διατηρεί μία ελάχιστη ταχύτητα Vs προκειμένου να αποφύγει την απώλεια στήριξης.
|
|
|
(1.18) |
Στην (1.18), ο CLmax αντιστοιχεί στη μεγίστη τιμή του συντελεστή άνωσης, συνήθως για γωνία πρόσπτωσης α=100.
• Η ταχύτητα VDmin στην οποία η οπισθέλκουσα είναι ελάχιστη, δίδεται από τη σχέση:
|
|
|
(1.19) |
1.2.2. Ομαλή πτήση (Ανοδική ή καθοδική) υπό σταθερή γωνία ίχνους πτήσης γ
Το αεροσκάφος κινείται με σταθερή ταχύτητα. Στο σχ. 1.15 παρουσιάζεται η περίπτωση της ανοδικής πτήσης ή αναρρίχησης (climb) υπό αρνητική γωνία ίχνους πτήσης γ (flight path angle). Σε αυτή την περίπτωση, από την ισορροπία των δυνάμεων, προκύπτουν οι σχέσεις:
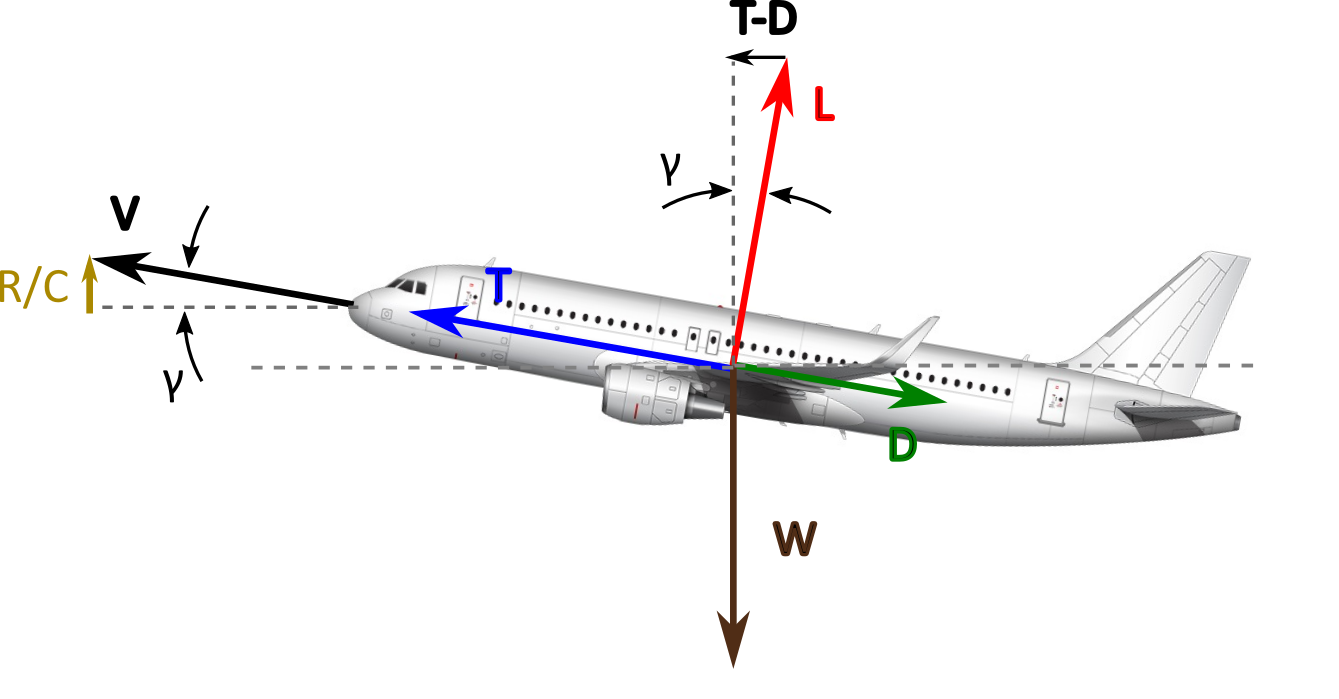
Σχήμα 1.15 Δυνάμεις στην ομαλή ανοδική πτήση
|
|
|
(1.20) |
Οπότε προκύπτει:
|
|
|
(1.21) |
Επίσης, αν θεωρηθεί μικρή γωνία ίχνους πτήσης:
|
|
|
(1.22) |
|
|
|
(1.23) |
Έτσι, ο ρυθμός ανόδου (R/C - Rate of Climb) είναι ανάλογος περίπου με τη διαθέσιμη περίσσεια ισχύος T - D. Η περίπτωση της καθοδικής πτήσης υπό θετική γωνία ίχνους πτήσης γ είναι εντελώς ανάλογη και προκύπτει από τις εξισώσεις (1.20)-(1.23) με απλή αλλαγή πρόσημου της γ.
1.2.3. Ομαλή περιστροφή
Σε αυτή την περίπτωση οι δυνάμεις ώσης T και αντίστασης D είναι ίσες μεταξύ τους και το αεροσκάφος κινείται σε κυκλική τροχιά με ακτίνα στροφής R και υπό μία γωνιά στροφής φ (Σχ. 1.16). Τότε ασκείται στο αεροσκάφος μια φυγόκεντρος δύναμη «προς τα έξω», η οποία εξισορροπείται από την αντίθετης φοράς, οριζόντια συνιστώσα της άνωσης.
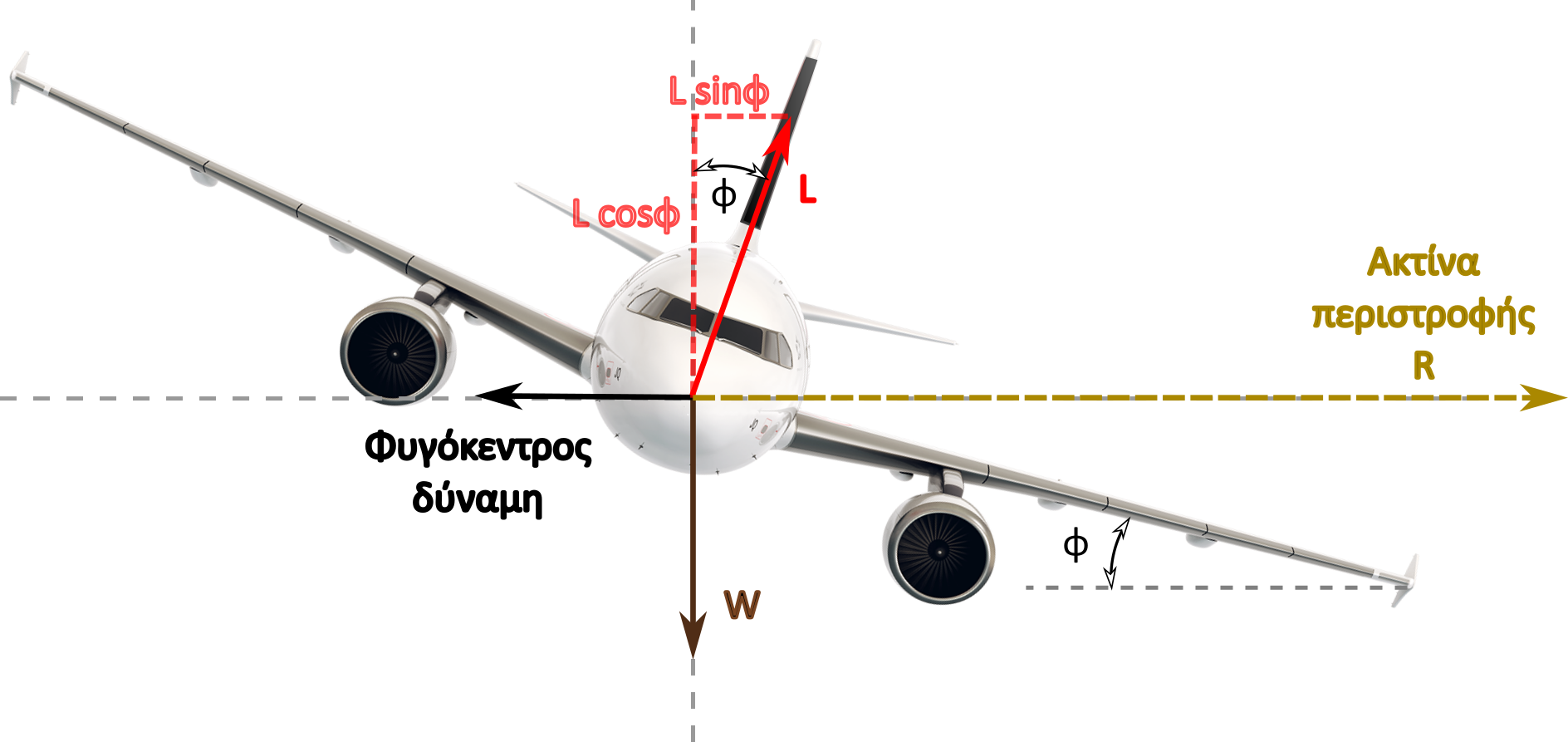
Σχήμα 1.16 Δυνάμεις κατά την ομαλή περιστροφή
|
|
|
(1.24) |
|
|
|
(1.25) |
Άρα:
|
|
|
(1.26) |
Σημειώνεται ότι ο μέγιστος συντελεστής άνωσης, αντιστοιχεί σε ελάχιστη ακτίνα περιστροφής.
|
|
|
(1.27) |
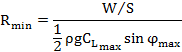
όπου φmax < 30° και W/S η φόρτιση της πτέρυγας.
Επίσης, ορίζεται η παράμετρος φόρτισης Ν:
|
|
|
(1.28) |
Η έννοια της παραμέτρου φόρτισης είναι η συσχέτιση της στιβαρότητας και της μηχανικής αντοχής της πτέρυγας (αλλά και της δομής του αεροσκάφους γενικότερα), με το επίπεδο των αεροδυναμικών δυνάμεων στο αεροσκάφος.
Αποδεικνύεται ότι:
|
|
|
(1.29) |
Η σημασία της σχέσης (1.29) βρίσκεται στο γεγονός ότι συσχετίζει την ικανότητα ελιγμών του αεροσκάφους με την ταχύτητα και την αντοχή του. Για να εκτελέσει ένα αεροσκάφος π.χ. «κλειστή στροφή» με μικρή ακτίνα R, πρέπει να διαθέτει υψηλή αντοχή, όπως φαίνεται από τον παράγοντα φόρτισης στον παρονομαστή της σχέσης (1.29).
2. Βασικές συνιστώσες, συστήματα αεροσκάφους και μηχανισμοί ελέγχου πτήσης
Οι βασικές συνιστώσες ενός αεροσκάφους και η λειτουργικότητά τους εικονίζονται στο σχήμα 1.17.
Ένα αεροσκάφος, εκτός από την απαιτούμενη ισχύ ώστε να υπερνικήσει τις δυνάμεις της βαρύτητας και τις αντιστάσεις του αέρα για να πετάξει, χρειάζεται τα μέσα για τον έλεγχο της πορείας του. Για την ικανότητα της εκτέλεσης και τον έλεγχο των διάφορων φάσεων πτήσης και των διάφορων ελιγμών, είναι αναγκαία η προσάρτηση επιπλέον επιφανειών και συστημάτων πέραν των πτερύγων.
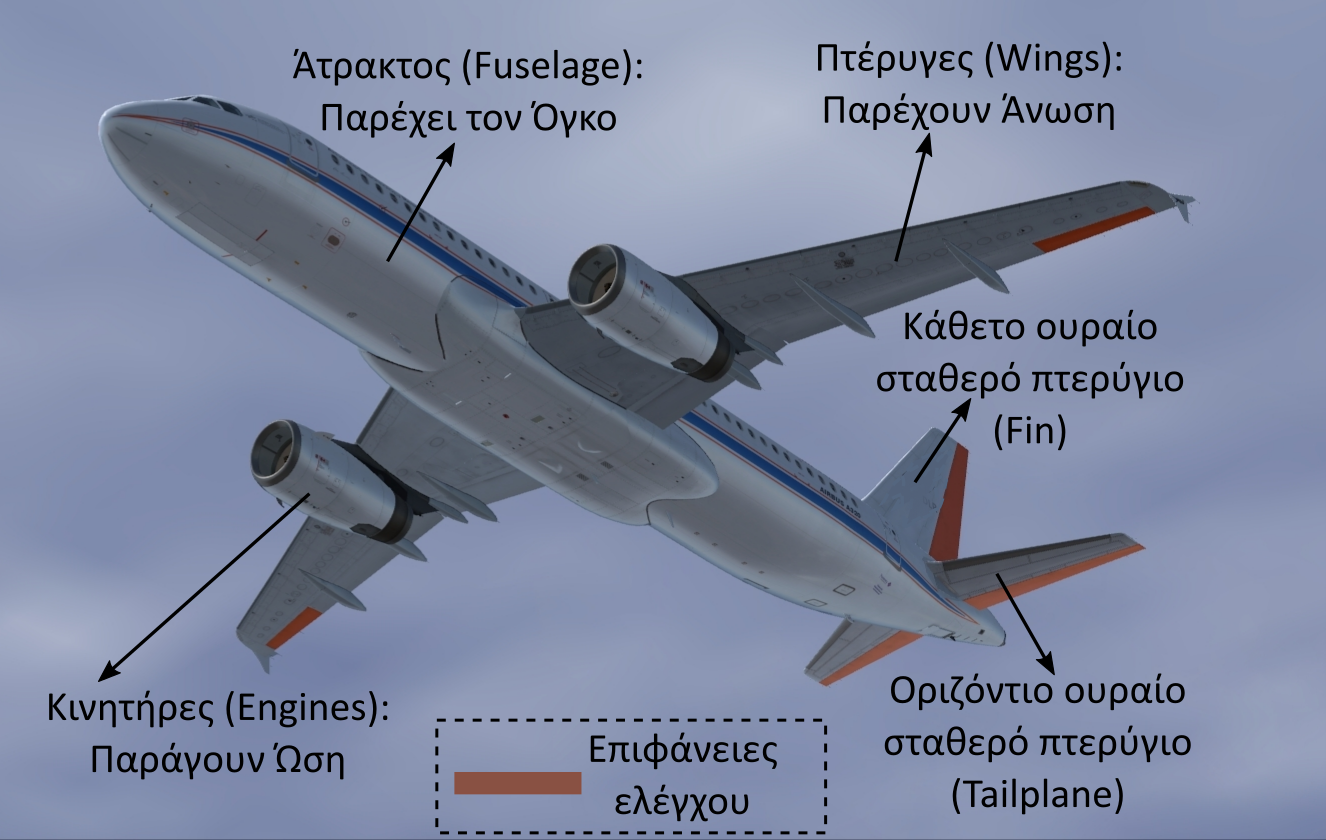
Σχήμα 1.17 Βασικές συνιστώσες τυπικού αεροσκάφους και η χρησιμότητά τους
2.1. Ορισμοί και λειτουργίες βασικών συνιστωσών τυπικού αεροσκάφους
Αρχικά παρουσιάζονται οι βασικές συνιστώσες οι οποίες συναντώνται σε ένα τυπικό αεροσκάφος, δεδομένου ότι υπάρχουν διαφορές μεταξύ των διάφορων τύπων και μοντέλων αεροσκαφών.
2.1.1. Πτέρυγες
Η πρωταρχική λειτουργία της πτέρυγας, είναι η παροχή της απαιτούμενης άνωσης. Η μεταβολή της άνωσης που παρέχει η πτέρυγα μπορεί να επιτευχθεί με τη μεταβολή της στάσης του αεροσκάφους και συνεπώς της γωνίας πρόσπτωσης. Στο σχήμα 1.18 παρουσιάζονται τα βασικά γεωμετρικά χαρακτηριστικά της πτέρυγας, σύμφωνα με τη σημειολογία του [6]:
•
![]() :
μέση χορδή,
:
μέση χορδή,
•
![]() :
εκπέτασμα πτέρυγας.
:
εκπέτασμα πτέρυγας.
Βάσει αυτών των μεγεθών, ορίζεται η μέση πτερυγική επιφάνεια:
|
|
|
(1.30) |
και ο λόγος επί μήκους:
|
|
|
(1.31) |
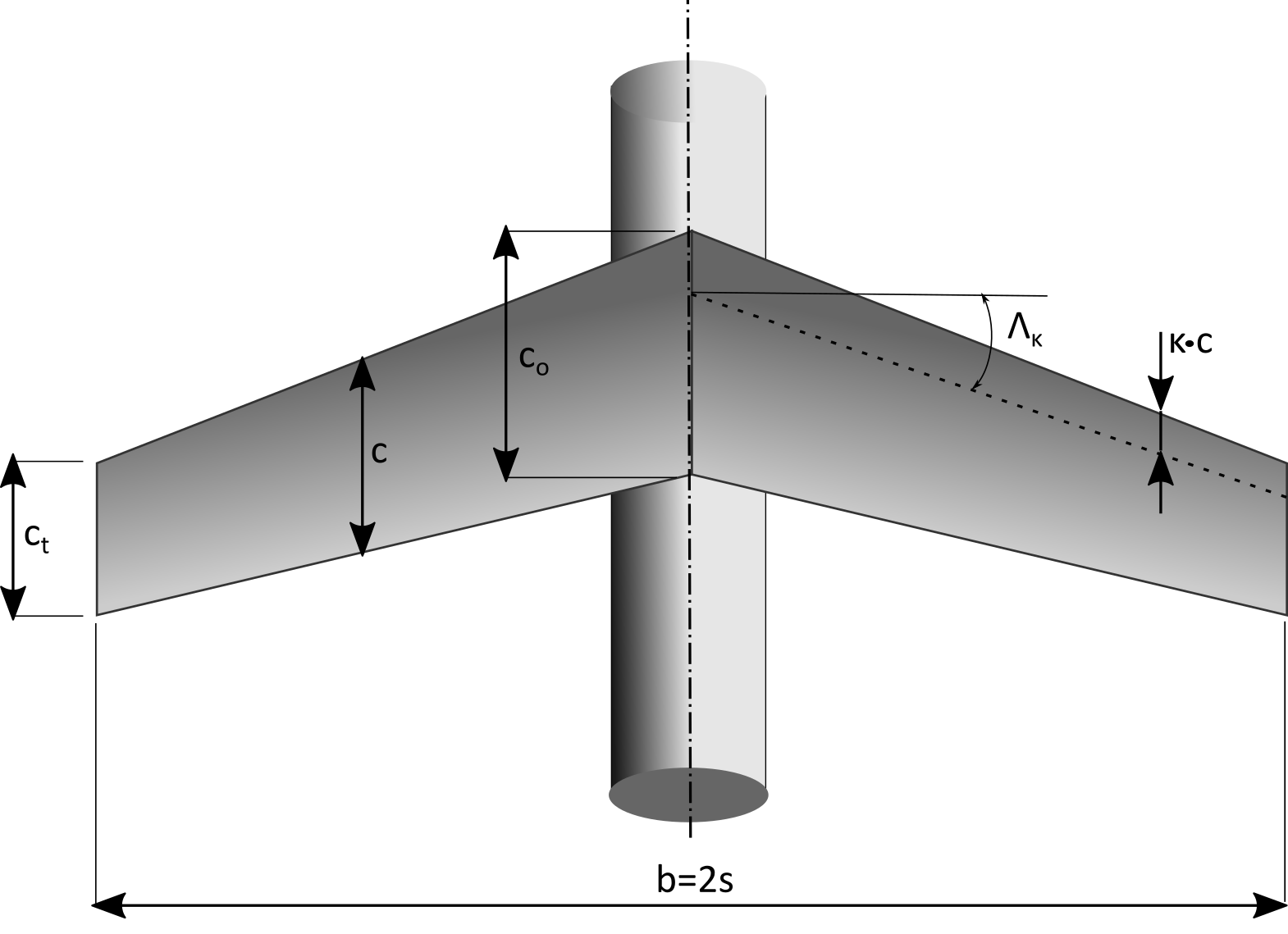
Σχήμα 1.18 Γεωμετρία πτέρυγας
Στο σχήμα 1.18 ορίζονται επίσης, τα εξής μεγέθη:
• c0: μήκος χορδής στη ρίζα της πτέρυγας,
• ct: μήκος χορδής στην κορυφή της πτέρυγας,
• κ: ποσοστό (%) του μήκους χορδής,
• Λκ: γωνία οπισθόκλισης.
2.1.2. Επιφάνειες ελέγχου
Οι επιφάνειες ελέγχου ή πηδάλια ελέγχου, ενός τυπικού αεροσκάφους, παρουσιάζονται στο σχήμα 1.19. και ορίζονται ως εξής:
• Πηδάλιο ανόδου-καθόδου (elevator): πτερύγιο τοποθετημένο κατά μήκος του οριζόντιου ουραίου σταθερού πτερυγίου με σκοπό τον έλεγχο της πρόνευσης (pitch).
• Πηδάλιο εκτροπής ή διεύθυνσης(rudder): πτερύγιο τοποθετημένο κατά μήκος του κάθετου ουραίου σταθερού πτερυγίου με σκοπό τον έλεγχο της εκτροπής (yaw).
• Πηδάλια περιστροφής ή κλίσης (ailerons): πτερύγια τοποθετημένα στην ακμή εκφυγής της κύριας πτέρυγας, κατά τη διεύθυνση του εκπετάσματος. Ο ρόλος τους είναι να παρέχουν τη δυνατότητα εκτέλεσης ελιγμών περιστροφής (roll) και για τον λόγο αυτό εκτρέπονται κατά αντίθετη φορά (το πτερύγιο της μίας πτέρυγας προς τα πάνω για εκτροπή του πτερυγίου της άλλης πτέρυγας προς τα κάτω).
Γενικά, μια θετική δράση ελέγχου από τον πιλότο του αεροσκάφους προκαλεί θετική απόκριση του αεροσκάφους, ενώ μια θετική απόκλιση μιας επιφάνειας ελέγχου προκαλεί αρνητική απόκριση στο αεροσκάφος.
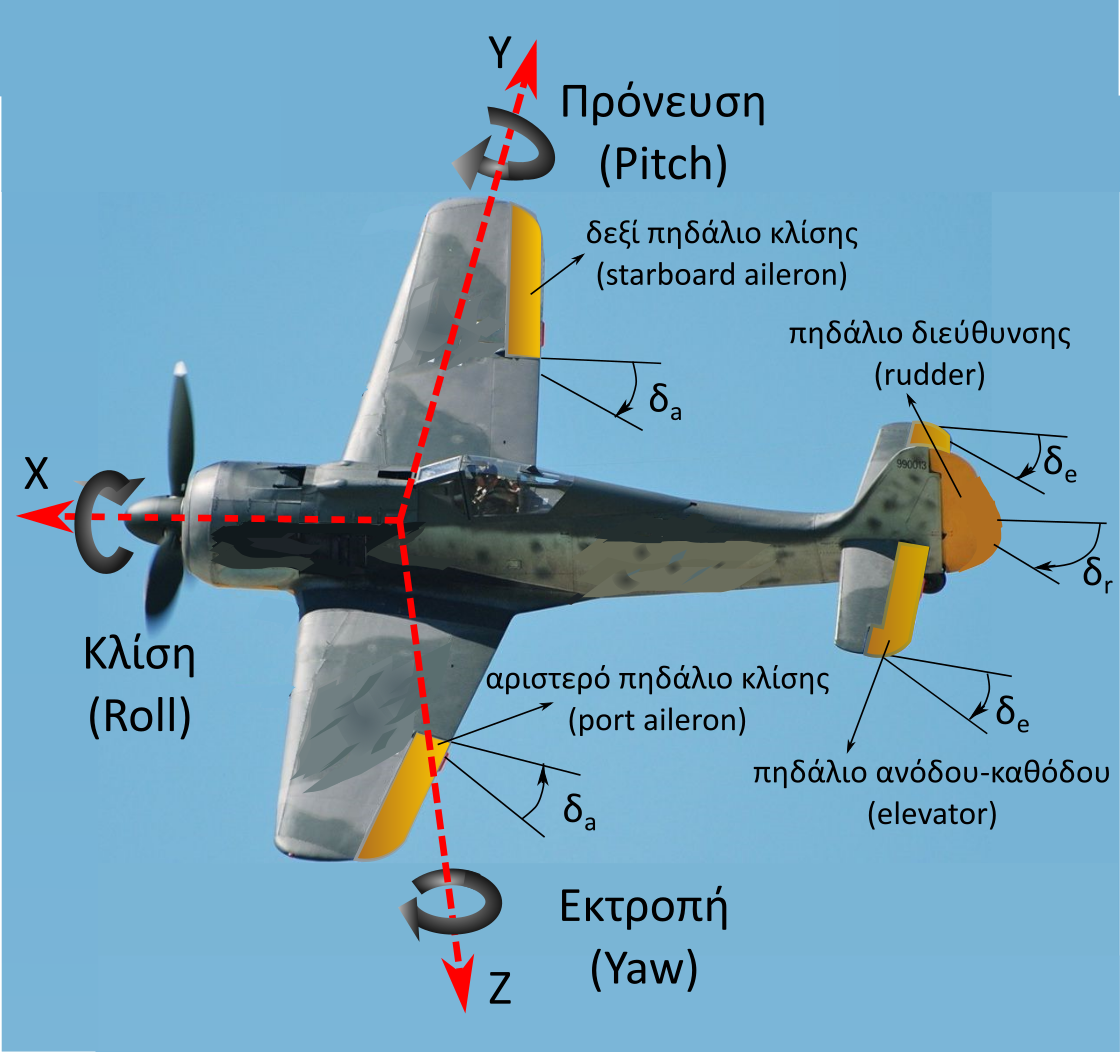
Σχήμα 1.19 Συμβολισμός επιφανειών ελέγχου
Έτσι, με βάση το σχήμα 1.19, οι φορές ορίζονται ως εξής:
• Ως προς την πρόνευση ή άνοδο-κάθοδο (pitch): θετική δύναμη έλξης στο χειριστήριο → θετική μετατόπιση του χειριστηρίου προς τα πίσω → η ακμή εκφυγής του πηδαλίου ανόδου-καθόδου κινείται προς τα επάνω (αρνητικά) → η κεφαλή ή ρύγχος (nose) του αεροσκάφους κινείται προς τα επάνω (απόκριση θετική).
• Ως προς την εκτροπή ή διεύθυνση (yaw): θετική εφαρμογή δύναμης στο δεξιό ποδωστήριο → θετική κίνηση προς τα μέσα του δεξιού ποδωστηρίου → Η ακμή εκφυγής του πηδαλίου διεύθυνσης κινείται προς τα δεξιά (αρνητικά) → Η κεφαλή του αεροσκάφους εκτρέπεται δεξιά (απόκριση θετική).
• Ως προς την περιστροφή ή κλίση ή διατοιχισμό (roll): θετική δεξιά εφαρμογή δύναμης στο χειριστήριο → θετική μετατόπιση του χειριστηρίου → δεξί πηδάλιο κλίσης (starboard aileron) πάνω, αριστερό πηδάλιο κλίσης (board aileron) κάτω (αρνητική φορά) → κλίση δεξιάς πτέρυγας προς τα κάτω → απόκριση δεξιάς περιστροφής θετική.
Οι γωνίες εκτροπής των πηδαλίων σύμφωνα με τη σημειολογία που χρησιμοποιεί ο Nelson [5], συμβολίζονται ως εξής:
• δe (η): γωνία εκτροπής πηδαλίου ανόδου-καθόδου,
• δr (ζ): γωνία εκτροπής πηδαλίου εκτροπής,
• δa (ξ): γωνία εκτροπής πηδαλίου κλίσης (aileron).
Τα ελληνικά γράμματα σε παρένθεση αφορούν εναλλακτικούς συμβολισμούς σε μερικά βιβλία επί του θέματος.
2.1.3. Κινητήρες
Οι κινητήρες παρέχουν την απαιτούμενη ώση ώστε να υπερνικηθεί η αεροδυναμική αντίσταση.
Η ώση του κινητήρα Τ ελέγχεται από τη μετατόπιση του μοχλού ισχύος (μανέτα/throttle lever) δp. Θετική μετατόπιση του μοχλού ισχύος θεωρείται η προς τα εμπρός κίνηση του, η οποία προκαλεί θετική αύξηση της ισχύος. Για ένα κινητήρα turbojet η σχέση μεταξύ της ώσης και της γωνίας του μοχλού ισχύος μπορεί να προσεγγιστεί από μια συνάρτηση μεταφοράς της μορφής:
|
|
|
(1.32) |
όπου kτ είναι μια κατάλληλη σταθερά κέρδους και tτ είναι η χρονική σταθερά της καθυστέρησης που συνήθως είναι της τάξης των δύο-τριών δευτερολέπτων.
2.2. Γεωμετρία αναφοράς του αεροσκάφους
Η γεωμετρική περιγραφή που θα χρησιμοποιηθεί στην παρούσα ανάλυση, αποτελεί αναπόσπαστο κομμάτι της διαδικασίας μοντελοποίησης. Έτσι, με βάση το σχήμα 1.20, ορίζονται οι εξής παράμετροι αναφοράς:
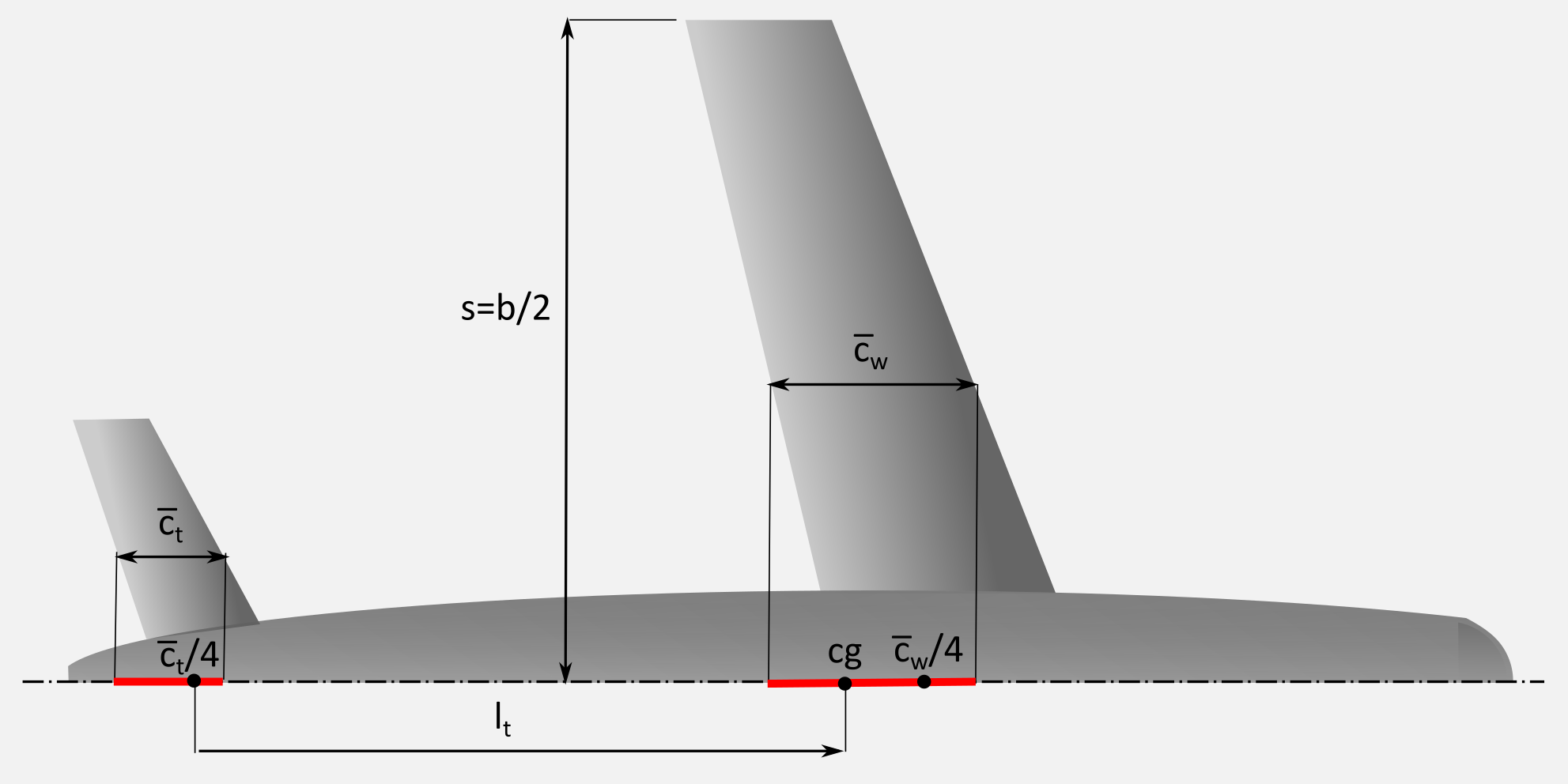
Σχήμα 1.20 Γεωμετρία αναφοράς του αεροσκάφους
• μέση αεροδυναμική χορδή (Mean Aerodynamic Chord-MAC):
|
|
|
(1.33) |

• κανονική μέση χορδή (Standard Mean Chord-SMC):
|
|
|
(1.34) |

όπου s = b/2 είναι το ήμισυ του εκπετάσματος (semi-span) και cy είναι η τοπική χορδή στη συντεταγμένη
(κατά την έννοια του εκπετάσματος) y. Στα περισσότερα αεροσκάφη, τα ![]() και
και
![]() ,
έχουν σχεδόν το ίδιο μήκος, οπότε μπορεί να επιλεγεί οποιοδήποτε εκ των δύο για
την ανάλυση.
,
έχουν σχεδόν το ίδιο μήκος, οπότε μπορεί να επιλεγεί οποιοδήποτε εκ των δύο για
την ανάλυση.
Ορίζονται επίσης, τα ακόλουθα μεγέθη:
•
h![]() ή
h
ή
h![]() :
θέση του κέντρου βάρους (cg - centre of gravity location) συναρτήσει του
:
θέση του κέντρου βάρους (cg - centre of gravity location) συναρτήσει του ![]() ή
του
ή
του ![]() ,
μετρούμενη από την ακμή προσβολής της χορδής αναφοράς. Συνήθως ισχύει 0.1
≤ h ≤ 0.4.
,
μετρούμενη από την ακμή προσβολής της χορδής αναφοράς. Συνήθως ισχύει 0.1
≤ h ≤ 0.4.
• lt: μοχλοβραχίονας ροπής οριζόντιου σταθερού ουραίου πτερυγίου (tail moment arm). Ορίζεται ως η διαμήκης απόσταση ανάμεσα στο κέντρο βάρους cg του αεροσκάφους και στο αεροδυναμικό κέντρο του οριζόντιου σταθερού ουραίου πτερυγίου (tailplane-horizontal tailplane) όπως φαίνεται στο σχήμα 1.20. To τελευταίο σημείο με ικανοποιητική ακρίβεια βρίσκεται στο τέταρτο της μέσης χορδής της πτέρυγας του οριζόντιου σταθερού ουραίου πτερυγίου. Κάποιες φορές η διαμήκης ροπή του οριζόντιου σταθερού πτερυγίου μετράται ως προς το αεροδυναμικό κέντρο της πτέρυγας.
• VΗ: λόγος όγκου οριζόντιου σταθερού ουραίου πτερυγίου (tail volume ratio):
|
|
|
(1.35) |
όπου St είναι η συνολική επιφάνεια του οριζόντιου σταθερού ουραίου πτερυγίου.
Ανάλογα μεγέθη ορίζονται και για το κάθετο σταθερό ουραίο πτερύγιο (fin-vertical tail). Αυτά συμβολίζονται αντίστοιχα με lf και VF (Σχήμα 1.21).
• lf: μοχλοβραχίονας ροπής κάθετου σταθερού ουραίου πτερυγίου (fin moment arm). Ορίζεται ως η διαμήκης απόσταση ανάμεσα στο κέντρο βάρους cg του αεροσκάφους και στο αεροδυναμικό κέντρο του κάθετου σταθερού ουραίου πτερυγίου. To τελευταίο σημείο με ικανοποιητική ακρίβεια βρίσκεται στο τέταρτο της μέσης χορδής της πτέρυγας του κάθετου σταθερού ουραίου πτερυγίου (Σχήμα 1.21). Κάποιες φορές η διαμήκης ροπή του κάθετου σταθερού πτερυγίου μετράται ως προς το αεροδυναμικό κέντρο (ac) της πτέρυγας.
• VF: λόγος όγκου κάθετου σταθερού ουραίου πτερυγίου (fin volume ratio).
|
|
|
(1.36) |
όπου SF είναι η συνολική επιφάνεια του κάθετου σταθερού ουραίου πτερυγίου.

Σχήμα 1.21 Μεγέθη γεωμετρίας αναφοράς κάθετου σταθερού ουραίου πτερύγιου
Βιβλιογραφία/Αναφορές
|
Γεώργιος Α. Γεωργαντόπουλος & Χρίστινα Γ. Γεωργαντοπούλου, Η Μηχανική Πτήσης του Αεροσκάφους σε ερωτήσεις. Αθήνα, Ελλάδα: Συμεών, 2005. |
|
|
Δημήτριος Σ. Μαθιουλάκης, Ιωάννης Σ. Αναγνωστόπουλος & Δημήτριος Γ. Τουζόπουλος, "Θεωρία Λεπτών Αεροτομών," σε Βιομηχανική Ρευστομηχανική. Αθήνα: Τμήμα Μηχ. Μηχ., Τομέας Ρευστών, ΕΜΠ, 2006. |
|
|
Michael V. Cook, Flight Dynamics Principles - A Linear Systems Approach to Aircraft Stability and Control, 2nd ed. Oxford, UK: Elsevier Ltd, 2007. |
|
|
Bill Crawford. (2009) Two and Three Dimensional Aerodynamics. |
|
|
Robert C. Nelson, Flight Stability and Automatic Control, 2nd ed. Singapore: WCB/McGraw-Hill, 1998. |
|
|
Bernard Etkin & Lloyd D. Reid, Dynamics of Flight: Stability and Control, 3rd ed. Toronto, Canada: John Wiley & Sons, Inc., 1996. |
2: ΣΤΑΤΙΚΗ ΙΣΟΡΡΟΠΙΑ ΚΑΙ ΑΝΤΙΣΤΑΘΜΙΣΗ
Σύνοψη
Εξάγεται η εξίσωση της ροπής πρόνευσης και παρουσιάζεται η συνεισφορά της πτέρυγας και του ουραίου οριζόντιου σταθερού πτερυγίου. Εξετάζονται οι έννοιες της αντιστάθμισης, της δυναμικής και στατικής, διαμήκους και εγκάρσιας ευστάθειας, καθώς και η λειτουργία των πηδαλίων ελέγχου.
Προαπαιτούμενη γνώση
Πέρα από τις βασικές γνώσεις μηχανικής, απαιτείται η κατανόηση της γεωμετρίας των συνιστωσών του αεροσκάφους και η γνώση των βασικών αεροδυναμικών εννοιών, τα οποία καλύπτονται στο 1ο κεφάλαιο.
1. Ισορροπία, αντιστάθμιση, ευστάθεια
Κατ’ αρχήν πρέπει να γίνει σαφής η έννοια «κατάσταση ισορροπίας» σε ένα αεροσκάφος. Για να μπορεί το αεροσκάφος να διατηρείται σε κατάσταση σταθερής ομαλής πτήσης πρέπει η συνισταμένη δύναμη και η συνισταμένη ροπή περί το κέντρο βάρους να είναι μηδέν. Τα χαρακτηριστικά ευστάθειας και ελέγχου ενός αεροσκάφους, αποτελούν βασικότατο μέρος της ποιότητας πτήσης και είναι απαραίτητη η συνύπαρξη τους με ικανοποιητικές επιδόσεις από άποψη ισχύος. Οι δύο απαραίτητες συνθήκες για επιτυχημένη πτήση είναι:
• να μπορεί το αεροσκάφος να πετύχει ισορροπημένη πτήση,
• να έχει τη δυνατότητα εκτέλεσης ελιγμών σε μεγάλο εύρος ταχυτήτων και υψομέτρου πτήσης.
Η ευστάθεια και ο έλεγχος αφορούν την ποιότητα της πτήσης και την ευκολία ελέγχου του αεροσκάφους. Η έννοια της ευστάθειας, μεταφράζεται ως η τάση του αεροσκάφους να επιστρέφει στην κατάσταση ισορροπίας του μετά από μια διαταραχή, όπως ορίζεται στο [6]. Η διαταραχή μπορεί να οφείλεται σε ενέργειες του πιλότου, σε ατμοσφαιρικά φαινόμενα ή/και σε οποιοδήποτε άλλο εσωτερικό ή εξωτερικό φυσικό η τεχνικό αίτιο (π.χ. δράση αυτόματου συστήματος ελέγχου, μηχανική βλάβη κ.ά.). Το αεροσκάφος πρέπει να είναι αρκετά ευσταθές ώστε να μην είναι αναγκαία η επέμβαση του πιλότου μετά από κάθε διαταραχή. Ο αεροδυναμικός και προωστικός έλεγχος θα πρέπει να απαιτούνται μόνο για την εκτέλεση ελιγμών.
Κατά τη διάρκεια της πτήσης ο πιλότος του αεροσκάφους ρυθμίζει τα πηδάλια με τέτοιο τρόπο, ώστε εάν σε οποιαδήποτε στιγμή απελευθερώσει τα χέρια του από τα χειριστήρια, το αεροσκάφος θα συνεχίσει να πετά στις συνθήκες πτήσης που είχαν επιλεγεί αρχικά. Με αυτόν τον τρόπο ο πιλότος απελευθερώνεται από τη διαρκή εκτέλεση των απαιτούμενων διορθωτικών χειρισμών, οι οποίοι μάλιστα απαιτούν την καταβολή σημαντικής σωματικής προσπάθειας ώστε να αντιμετωπιστούν οι δυνάμεις ελέγχου στα χειριστήρια. Όταν ο πιλότος καταφέρει να ρυθμίσει τα χειριστήρια με αυτόν τον τρόπο ―δηλαδή να «αντισταθμίσει» το αεροσκάφος― τότε το αεροσκάφος είναι «αντισταθμισμένο», ενώ η κατάσταση αντιστάθμισης καθορίζει τις αρχικές συνθήκες γύρω από τις οποίες μπορεί να μελετηθεί η δυναμική συμπεριφορά που μας ενδιαφέρει.
Όλα τα αεροσκάφη είναι εφοδιασμένα με κάποιο σύστημα προ-τοποθέτησης ή ρύθμισης, που ονομάζεται θέση αναφοράς (datum) ή «αντιστάθμιση» των πρωτευουσών επιφανειών ελέγχου: Τα πηδάλια κλίσης, ανόδου-καθόδου και εκτροπής είναι εφοδιασμένα με αντισταθμιστικά πηδάλια [trim tabs (σχήμα 2.14)] τα οποία για όλα τα αεροσκάφη, εκτός από τα πολύ μικρά, μπορούν να ρυθμιστούν μέσα από τον θάλαμο ελέγχου κατά τη διάρκεια της πτήσης.
Η μελέτη της ευστάθειας ενός αεροσκάφους χωρίζεται σε δύο μέρη:
• στατική ευστάθεια (static stability),
• δυναμική ευστάθεια (dynamic stability).
Το κάθε μέρος αναλύεται ξεχωριστά στις επόμενες δύο παραγράφους.
1.1. Στατική ευστάθεια
Η στατική ευστάθεια είναι η τάση του αεροσκάφους να επιστρέφει στην κατάσταση ισορροπίας του μετά από μια διαταραχή. Δηλαδή ένα στατικά ευσταθές αεροσκάφος, είναι κατασκευασμένο με τέτοιο τρόπο ώστε μετά από μια διαταραχή, να δημιουργούνται κατάλληλες αεροδυναμικές δυνάμεις επαναφοράς στη κατάσταση ισορροπίας. Στο σχήμα 2.1 παρουσιάζονται ποιοτικά οι διάφορες περιπτώσεις στατικής ευστάθειας. Στην ευσταθή περίπτωση της σφαίρας, η δύναμη του βάρους παίζει τον ρόλο της δύναμης επαναφοράς.
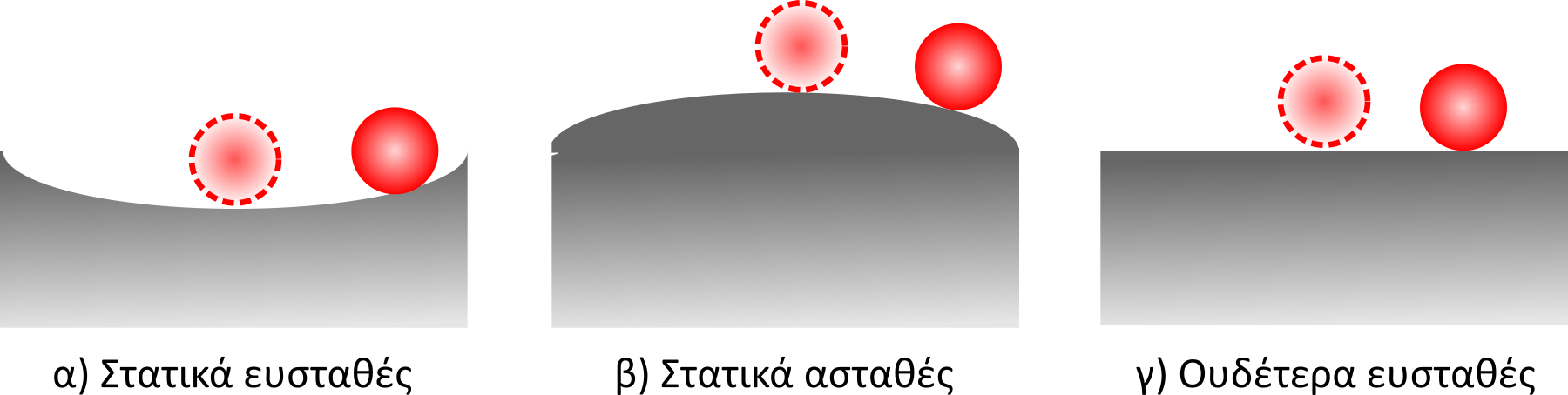
Σχήμα 2.1 Περιπτώσεις στατικής ευστάθειας
Η διατήρηση της ισορροπίας (trimmed equilibrium) απαιτεί την κατάλληλη-και ταυτόχρονη ρύθμιση των κύριων μεταβλητών της πτήσης και στους έξι βαθμούς ελευθερίας ενώ εξαρτάται από την ταχύτητα ή τον αριθμό Mach, τη γωνία του ίχνους πτήσης, τη διαμόρφωση (configuration) του αεροσκάφους, το βάρος και τη θέση του κέντρου βάρους. Καθώς αυτές οι παράμετροι μεταβάλλονται κατά τη διάρκεια μιας τυπικής πτήσης, απαιτείται νέα αντιστάθμιση. Ευτυχώς η διαδικασία αντιστάθμισης δεν είναι ιδιαίτερα δύσκολη. Η συμμετρία της κατασκευής προσδίδει συμμετρικές αεροδυναμικές ιδιότητες στο αεροσκάφος, κάτι που συνεπάγεται ότι συνήθως απαιτείται μόνο διαμήκης (longitudinal) αντιστάθμιση. Η εγκάρσια (lateral) αντιστάθμιση και η αντιστάθμιση ως προς τη διεύθυνση (directional), είναι πιθανόν να εφαρμοστεί σε περίπτωση κάποιας ασυμμετρίας καυσίμου ή στην περίπτωση αστοχίας ενός κινητήρα (για πολυκινητήριο αεροσκάφος).
Η εγκάρσια ευστάθεια και η ευστάθεια διεύθυνσης συνήθως ενυπάρχουν στα περισσότερα αεροσκάφη καθορίζοντας ότι ως προς την περιστροφή το αεροσκάφος θα παραμείνει με τις πτέρυγες οριζόντιες (wings level) και ότι ως προς την εκτροπή, θα έχει την τάση να στρέφει την κεφαλή του προς τον σχετικό άνεμο, δηλαδή θα έχει ανεμουριακή (weathercock) συμπεριφορά, σύμφωνα με τον Cook [3] (εφόσον τα πηδάλια περιστροφής και εκτροπής βρίσκονται τοποθετημένα στη μηδενική θέση ή στη θέση αναφοράς). Με τον τρόπο αυτό, υπό κανονικές συνθήκες, το αεροσκάφος θα «αναζητά» με φυσικό τρόπο εγκάρσια ισορροπία και ισορροπία διεύθυνσης χωρίς παρέμβαση από τον πιλότο. Αυτό ισχύει ακόμη και όταν συμβαίνουν σημαντικές μεταβολές στην ταχύτητα, τη διαμόρφωση, το βάρος και τη θέση του κέντρου βάρους, καθώς διατηρείται η συμμετρία του σκάφους.
Από την άλλη πλευρά, όταν υφίστανται τόσο σημαντικές μεταβολές στις συνθήκες πτήσης, είναι επακόλουθο να συμβούν σημαντικές μεταβολές στη διαμήκη αντιστάθμιση. Η διαμήκης αντιστάθμιση περιλαμβάνει την ταυτόχρονη ρύθμιση της γωνίας του πηδαλίου ανόδου-καθόδου και της ώσης ώστε να προσδοθεί στο αεροσκάφος η απαιτούμενη ταχύτητα και γωνία του ίχνους πτήσης για δεδομένη διαμόρφωση. Η ισορροπία θα επιτευχθεί, εφόσον το αεροσκάφος είναι ευσταθές κατά τον διαμήκη άξονα, ενώ οι δράσεις ελέγχου (control actions) ώστε να αντισταθμιστεί το αεροσκάφος θα εξαρτώνται από τον βαθμό (degree) της διαμήκους στατικής ισορροπίας που ορίζεται στο υποκεφάλαιο 2.3 του παρόντος κεφαλαίου. Καθώς οι διαμήκεις συνθήκες πτήσης μεταβάλλονται διαρκώς, είναι πολύ σημαντικό η ισορροπία να μπορεί να επιτευχθεί σε όλες τις συνθήκες που μπορεί να συναντήσει ο πιλότος και το αεροσκάφος. Για αυτόν τον λόγο δίνεται πολύ μεγάλη σημασία στο πρόβλημα της επιβεβαίωσης της επάρκειας στη διαμήκη στατική ευστάθεια, καθώς και στην επάρκεια κατά τον διαμήκη έλεγχο αντιστάθμισης (trim control). Λόγω της σημασίας της η «στατική ευστάθεια και αντιστάθμιση» συχνά μεταφράζεται ως «διαμήκης στατική ευστάθεια και αντιστάθμιση».
Πρέπει τέλος να σημειωθεί ότι η στατική και η δυναμική ευστάθεια στην ουσία δεν μπορούν να διαχωριστούν, όμως, καθώς η στατική ευστάθεια είναι αυτή που καθορίζει τα χαρακτηριστικά ελέγχου και αντιστάθμισης του αεροσκάφους η ξεχωριστή μελέτη τους αποτελεί ένα χρήσιμο μέσο για να εισαχθούμε στην έννοια της ευστάθειας.
1.2. Δυναμική ευστάθεια
Η δυναμική ευστάθεια ασχολείται με τη χρονική συμπεριφορά της κίνησης του αεροσκάφους μετά από μια διαταραχή. Δηλαδή ασχολείται με τη χρονική διάρκεια και τον τρόπο που το αεροσκάφος επανέρχεται στην κατάσταση ισορροπίας, εφόσον είναι ευσταθές. Στο σχήμα 2.2 παρουσιάζονται ποιοτικά, χρονικές αποκρίσεις μετατόπισης στις τρεις βασικές περιπτώσεις δυναμικής ευστάθειας.
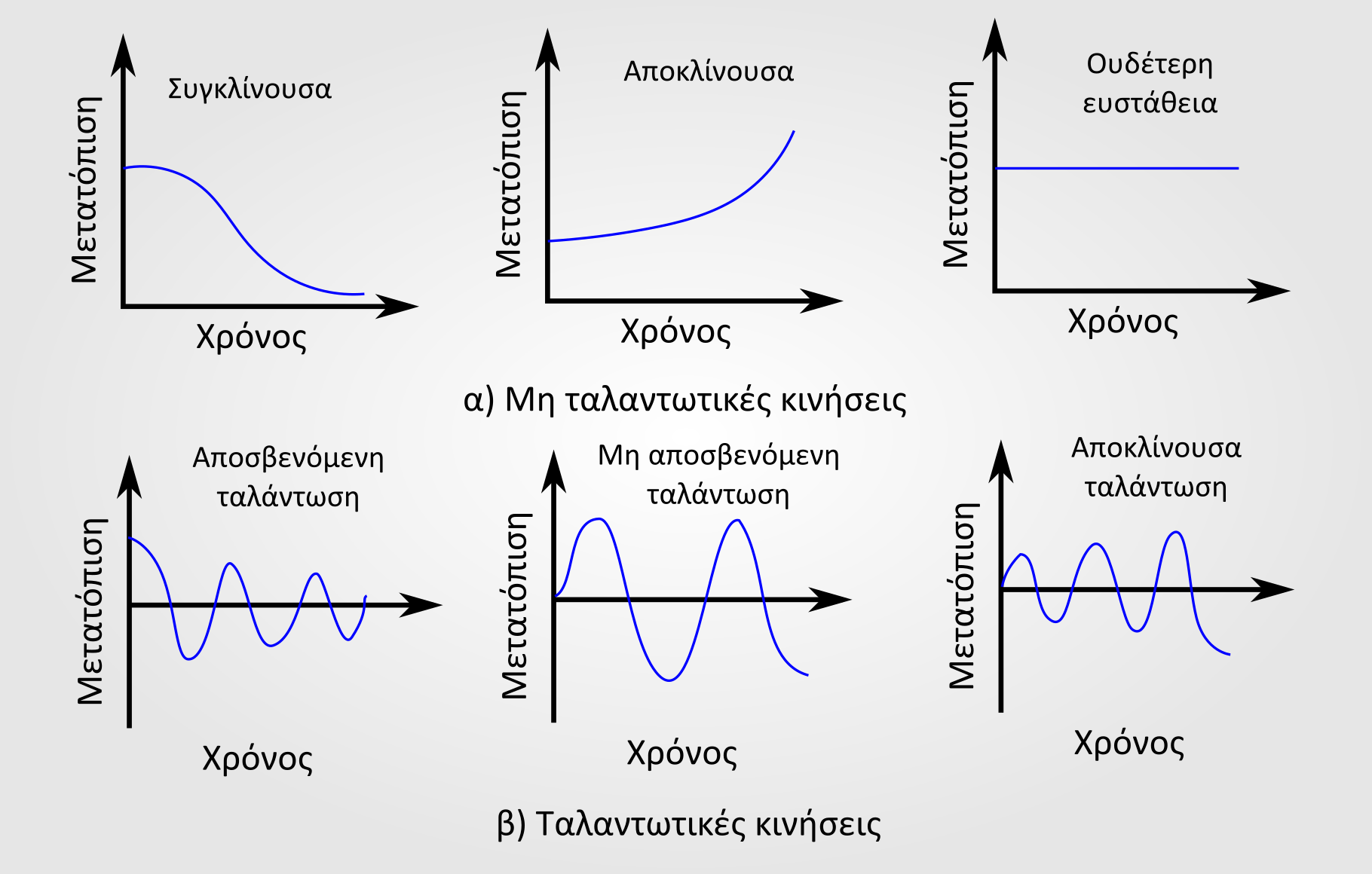
Σχήμα 2.2. Περιπτώσεις δυναμικής ευστάθειας
Να σημειωθεί ότι ένα στατικά ευσταθές αεροσκάφος δεν είναι απαραίτητα και δυναμικά ευσταθές, όμως, η στατική ευστάθεια είναι αναγκαία συνθήκη για τη δυναμική ευστάθεια. Μία τέτοια περίπτωση φαίνεται στο σχήμα 2.3 και το πως αποκρίνεται ως προς την πρόνευση το αεροσκάφος μετά από μια διαταραχή.
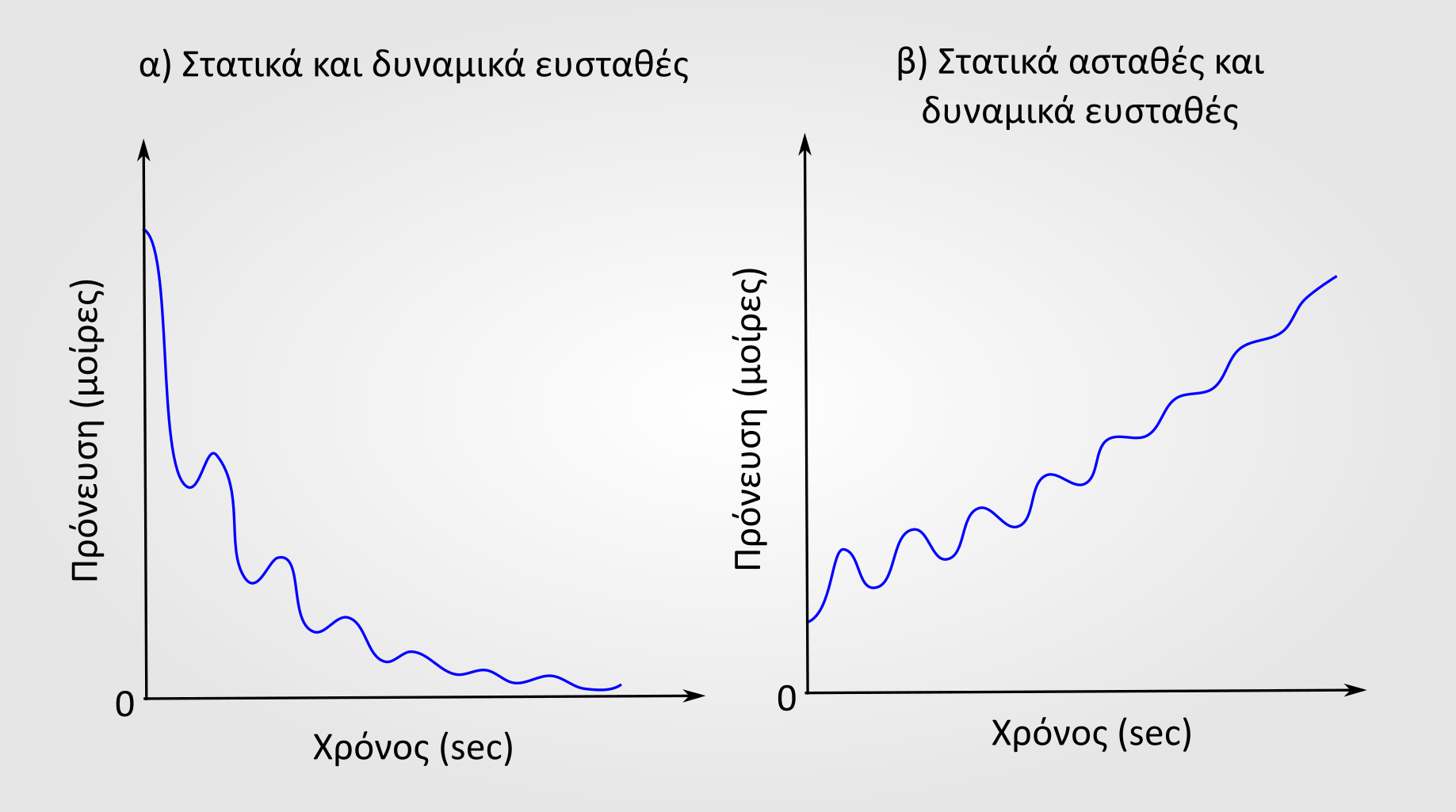
Σχήμα 2.3. Απόκριση πρόνευσης: α) στατικά και δυναμικά ευσταθούς αεροσκάφους, b) στατικά ασταθούς και δυναμικά ευσταθούς αεροσκάφους.
Η απόσβεση μιας διαταραχής μετά από κάποιο χρονικό διάστημα προϋποθέτει την ύπαρξη δυνάμεων αντίστασης στη διαταραχή. Σε αυτή την περίπτωση υφίσταται διάχυση ενέργειας που σημαίνει ότι το αεροσκάφος έχει θετική απόσβεση η οποία οφείλεται σε ροπές και δυνάμεις που δημιουργούνται κατά την κίνηση του. Ένα αεροσκάφος με αρνητική απόσβεση, είναι δυναμικά ασταθές και χρειάζεται η παροχή τεχνητής απόσβεσης από κάποιο ηλεκτρομηχανικό σύστημα ευστάθειας.
Επίσης, υπάρχουν διάφοροι βαθμοί ευστάθειας που καθορίζονται από χαρακτηριστικά της χρονικής απόκρισης της κίνησης μετά από μια διαταραχή. Ειδικά όσον αφορά ταλαντωτικές κινήσεις, η περίοδος και η συχνότητα είναι υψίστης σημασίας. Επιπλέον, πρέπει να αναφερθεί ότι, μπορεί ένα αεροσκάφος να είναι δυναμικά ευσταθές όταν τα χειριστήρια είναι σταθεροποιημένα, ενώ μετά από κάποια διορθωτική ενέργεια του πιλότου να γίνει δυναμικά ασταθές. Αυτό μπορεί να συμβεί για παράδειγμα σε περίπτωση ταλαντωτικής κίνησης, αν οι διορθωτικές ενέργειες του πιλότου είναι σε διαφορά φάσης με την κίνηση.
Η δυναμική ευστάθεια αποτελεί βασικό αντικείμενο του συγγράμματος και αναλύεται εκτεταμένα στα επόμενα κεφάλαια, που αφορούν τη διαμήκη και εγκάρσια δυναμική, όπως και τα συστήματα ελέγχου και αυτόματους πιλότους.
2. Διαμήκης στατική ευστάθεια
2.1. Υπολογισμός της ροπής πρόνευσης
Η εξίσωση της ροπής πρόνευσης απαιτεί τον ορισμό της γεωμετρίας αναφοράς του αεροσκάφους και την ανάλυση της λειτουργίας της πτέρυγας και του ουραίου πτερυγίου, όπως αυτά διατυπώθηκαν στο υποκεφάλαιο 2.2 του κεφ.1 και επεκτείνονται παρακάτω. Στην έκφραση της ροπής πρόνευσης συμμετέχουν ουσιαστικά η (κύρια) πτέρυγα και το ουραίο πτερύγιο, και συμπληρωματικά η άτρακτος και το σύστημα πρόωσης. Ασφαλώς όμως η επίδραση της ατράκτου και του συστήματος πρόωσης, είναι δευτερεύουσας σημασίας.
Η παρούσα ανάλυση, όπως την παρουσιάζει ο Nelson [5], θα επικεντρωθεί σε μεθόδους που εξάγονται από απλές θεωρητικές εκτιμήσεις και οι οποίες γενικά παρέχουν ικανοποιητική ακρίβεια, αρκετή για προκαταρκτικούς υπολογισμούς. Επίσης, να σημειωθεί ότι η ανάλυση αφορά την υποηχητική πτήση, όπου γενικά οι γωνίες πρόσπτωσης είναι μικρές.
2.1.1. Η συνεισφορά της κύριας πτέρυγας
Στο σχήμα 2.4 φαίνεται η μέση κανονική χορδή της κύριας πτέρυγας (wing standard mean chord) και σημειώνονται τα σχετικά γεωμετρικά μεγέθη:
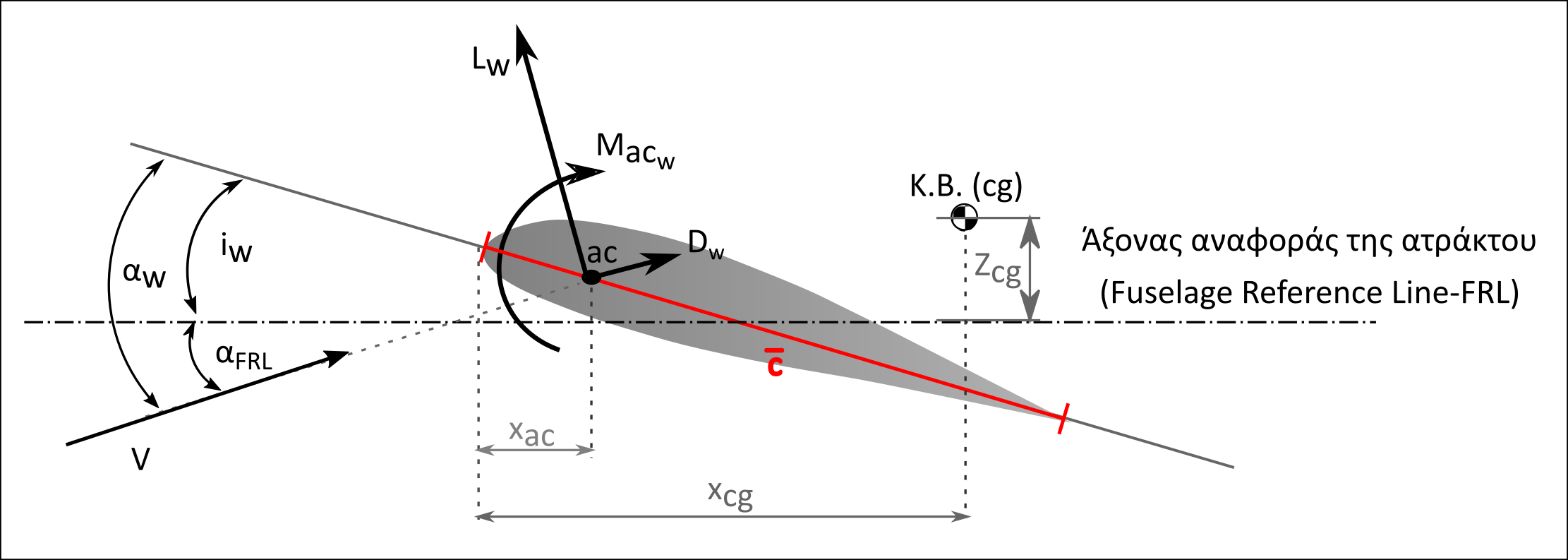
Σχήμα 2.4 Γωνιές, δυνάμεις και ροπές στην κύρια πτέρυγα
• γραμμή Αναφοράς Ατράκτου (Fuselage Reference Angle/FRL): γραμμή μηδενικής άνωσης,
• αw: γωνία πρόσπτωσης πτέρυγας,
• αFRL: γωνία μεταξύ Γραμμής Αναφοράς Ατράκτου και διανύσματος ταχύτητας της ροής (η μη μηδενική τιμή της οφείλεται στο κατώρευμα),
• iw: τοπική γωνία πρόσπτωσης (incidence) μεταξύ μέσης αεροδυναμικής χορδής και Γραμμής Αναφοράς Ατράκτου,
• xac: οριζόντια απόσταση μεταξύ ακμής πρόσπτωσης LE και αεροδυναμικού κέντρου ac,
• xcg: οριζόντια απόσταση μεταξύ ακμής πρόσπτωσης LE και κέντρου βάρους cg,
• zcg: κάθετη απόσταση μεταξύ Γραμμής Αναφοράς Ατράκτου και κέντρου βάρους cg,
•
![]() :
ροπή πρόνευσης κύριας πτέρυγας περί το αεροδυναμικό κέντρο.
:
ροπή πρόνευσης κύριας πτέρυγας περί το αεροδυναμικό κέντρο.
Λαμβάνοντας το άθροισμα των ροπών περί το κέντρο βάρους προκύπτει η εξίσωση:
|
|
|
(2.1) |

Διαιρώντας την (2.1) με ½ρV2Sc̅ και εισάγοντας τους αντίστοιχους αδιάστατους συντελεστές προκύπτει:
|
|
|
(2.2) |

Εκτεταμένη αναφορά περί αδιαστατοποίησης πραγματοποιείται στο παράρτημα Δ.1. Ο δείκτης “m” αναφέρεται στους αδιάστατους συντελεστές και παραγώγους
ευστάθειας της ροπής ![]() Εναλλακτικά
θα μπορούσε να χρησιμοποιείται και ο δείκτης “M” εφόσον
αναφέρεται στο ίδιο μέγεθος, τη ροπή (Moment) πρόνευσης.
Όμως τo πεζό “m”
συμβαδίζει με τη σημειολογία που χρησιμοποιείται στις ροπές τις εγκάρσιας
δυναμικής όπως αναφέρεται και στα επόμενα τμήματα του συγγράμματος. Αυτό
κρίνεται σκόπιμο ώστε να μην υπάρχει σύγχυση μεταξύ των συντελεστών και
παραγώγων της άνωσης
Εναλλακτικά
θα μπορούσε να χρησιμοποιείται και ο δείκτης “M” εφόσον
αναφέρεται στο ίδιο μέγεθος, τη ροπή (Moment) πρόνευσης.
Όμως τo πεζό “m”
συμβαδίζει με τη σημειολογία που χρησιμοποιείται στις ροπές τις εγκάρσιας
δυναμικής όπως αναφέρεται και στα επόμενα τμήματα του συγγράμματος. Αυτό
κρίνεται σκόπιμο ώστε να μην υπάρχει σύγχυση μεταξύ των συντελεστών και
παραγώγων της άνωσης ![]() και
αυτών της ροπής περιστροφής, χρησιμοποιείται το πεζό “l”
(
και
αυτών της ροπής περιστροφής, χρησιμοποιείται το πεζό “l”
(![]() και
αντίστοιχα για τη ροπή εκτροπής (
και
αντίστοιχα για τη ροπή εκτροπής (![]() .
Υποθέτοντας ότι η γωνία πρόσπτωσης είναι μικρή -υπόθεση κοντά στην
πραγματικότητα λόγω του ότι αναφερόμαστε σε υποηχητική πτήση- τότε:
.
Υποθέτοντας ότι η γωνία πρόσπτωσης είναι μικρή -υπόθεση κοντά στην
πραγματικότητα λόγω του ότι αναφερόμαστε σε υποηχητική πτήση- τότε:
|
|
|
(2.3) |
Θεωρώντας επίσης, ότι η κάθετη απόσταση zcg της Γραμμής Αναφοράς της Ατράκτου από το κέντρο βάρους, είναι συγκριτικά μικρή, μπορούν να αμεληθούν οι αντίστοιχοι όροι και η εξίσωση γίνεται:
|
|
|
(2.4) |
όπου
|
|
|
(2.5) |
Είναι συνήθης τακτική οι αποστάσεις του κέντρου βάρους και του αεροδυναμικού κέντρου από την ακμή εκφυγής, να δίνονται ως ποσοστό της χορδής:
|
|
|
(2.6) |
|
|
|
(2.7) |
Τότε η εξίσωση της ροπής γίνεται:
|
|
|
(2.8) |
2.1.2. Η συνεισφορά του οριζόντιου ουραίου σταθερού πτερυγίου
Το οριζόντιο ουραίο σταθερό πτερύγιο, μπορεί να βρίσκεται ανάντη ή κατάντη της κύριας πτέρυγας. Στην πρώτη περίπτωση ονομάζεται canard. Και στις δύο περιπτώσεις επηρεάζεται από το πεδίο ροής που επάγει η κύρια πτέρυγα. Η διαφορά είναι ότι το canard επηρεάζεται από το ανώρευμα της κύριας πτέρυγας ενώ στην περίπτωση του οριζόντιου ουραίου πτερυγίου (tailplane) από το κατώρευμα.
Η συνήθης περίπτωση και αυτή που θα εξεταστεί είναι η θέση του σταθεροποιητικού πτερυγίου πίσω από την πτέρυγα (ουραίο σταθεροποιητικό πτερύγιο). Ο σκοπός είναι να εξεταστεί η άνωση που παρέχει το ουραίο και το πως η ροπή που προκαλεί, υπεισέρχεται στην εξίσωση της συνολικής ροπής πρόνευσης. Ένα δεύτερο ζήτημα, είναι η εξέταση των ροπών, στις αρθρώσεις του πηδαλίου ανόδου - καθόδου. Στο σχήμα 2.5 παρουσιάζονται οι μέσες χορδές πτέρυγας και ουραίου και τα σχετικά γεωμετρικά μεγέθη:
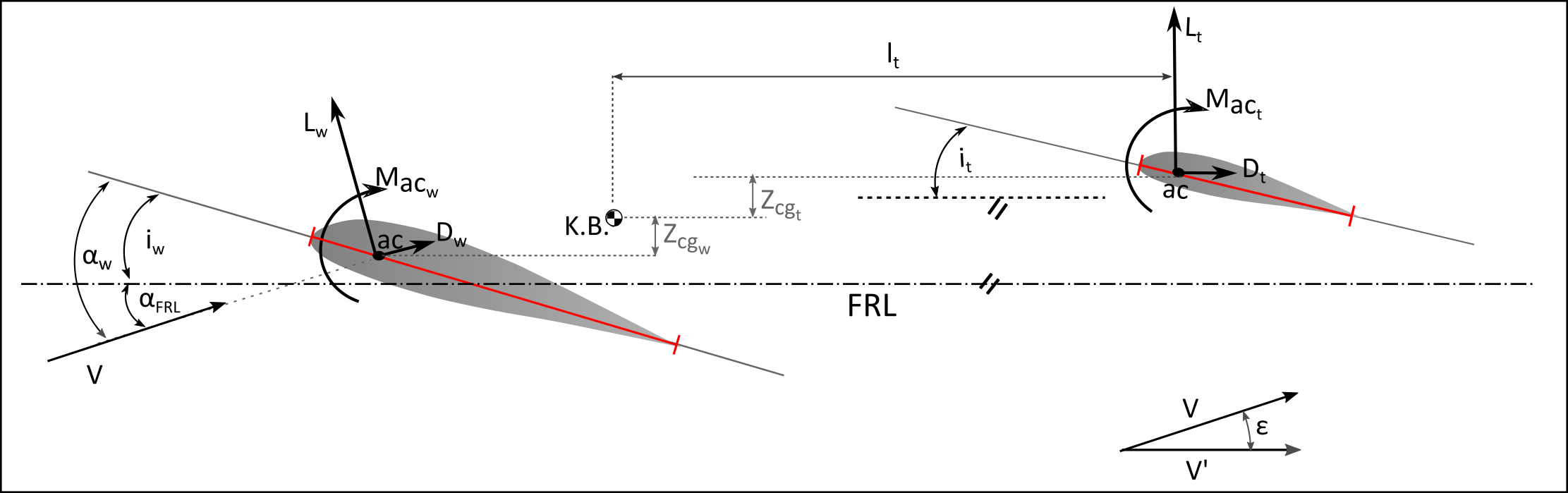
Σχήμα 2.5 Γωνίες, δυνάμεις και ροπές στην κύρια πτέρυγα και το ουραίο οριζόντιο πτερύγιο
• αt: γωνία πρόσπτωσης οριζόντιου σταθερού πτερυγίου (tailplane),
• ε: γωνία κατωρεύματος (downwash),
• it: τοπική γωνία πρόσπτωσης (incidence),
• lt: οριζόντια απόσταση κέντρου βάρους και αεροδυναμικού κέντρου ουραίου,
• zcg,t: κάθετη απόσταση αεροδυναμικού κέντρου ουραίου και κέντρου βάρους,
• Μac,t: ροπή πρόνευσης οριζόντιου σταθερού περί το αεροδυναμικό κέντρο του,
• FRL: γραμμή μηδενικής άνωσης.
Η έκφραση της γωνίας πρόσπτωσης του ουραίου οριζόντιου σταθερού προκύπτει από τη γεωμετρία του σχήματος 2.5:
Από την υπόθεση μικρών γωνιών πρόσπτωσης και αγνοώντας την οπισθέλκουσα του ουραίου οριζόντιου σταθερού, η συνολική άνωση μαζί με την άνωση της κύριας πτέρυγας είναι:
|
|
|
(2.10) |
όπου
|
|
|
(2.11) |
S, St είναι αντίστοιχα οι επιφάνειες της κύριας πτέρυγας και του οριζόντιου ουραίου πτερυγίου, Vt , Vw είναι αντίστοιχα οι σχετικές ταχύτητες του αέρα στην κύρια πτέρυγα και στο οριζόντιο ουραίο πτερύγιο και CLt ο συντελεστής άνωσης του οριζόντιου ουραίου πτερυγίου.
Ο λόγος αυτός των δυναμικών πιέσεων, ονομάζεται αποδοτικότητα του ουραίου και παίρνει συνήθως τιμές 0.8:1.2 ανάλογα με τη θέση του ουραίου ως προς την πτέρυγα. Αν το ουραίο βρίσκεται μέσα στον ομόρρου της πτέρυγας ή της ατράκτου τότε Qt<Qw άρα η<1 λόγω της απώλειας ροπής στον ομόρρου. Σε αντίθετη περίπτωση Qt>Qw και η>1.
Λαμβάνοντας πλέον τις ροπές περί το κέντρο βάρους, εξάγεται η εξίσωση της ροπής πρόνευσης του ουραίου :
|
|
|
(2.12) |

Στις περισσότερες περιπτώσεις αεροσκαφών η θέση του ουραίου σε
σχέση με την πτέρυγα, είναι τέτοια που οι δύο τελευταίοι όροι στο δεξί μέλος
της εξίσωσης είναι πολύ μικροί συγκριτικά με τον πρώτο και μπορούν να
παραλειφθούν. Εφόσον υποτέθηκαν μικρές γωνίες και ![]() >>
>>
![]() η
εξίσωση (2.12) καταλήγει στη μορφή:
η
εξίσωση (2.12) καταλήγει στη μορφή:
όπου ο λόγος όγκου οριζόντιου σταθερού ουραίου πτερυγίου (Horizontal tail volume, εξίσωση 1.13) ορίζεται ως:
|
|
|
(2.14) |
Επίσης, αν ![]() είναι η κλίση της καμπύλης άνωσης του ουραίου και
αντικαθιστώντας τη γωνία πρόσπτωσης αt από την εξίσωση (2.9) τότε προκύπτει:
είναι η κλίση της καμπύλης άνωσης του ουραίου και
αντικαθιστώντας τη γωνία πρόσπτωσης αt από την εξίσωση (2.9) τότε προκύπτει:
|
|
|
(2.15) |
Η γωνία κατωρεύματος ε εκφράζεται ως:
|
|
|
(2.16) |
όπου εο είναι η γωνία κατωρεύματος για μηδενική γωνία πρόσπτωσης αw.
Από τη θεωρία πεπερασμένης πτέρυγας, στην περίπτωση ελλειπτικής κατανομής της άνωσης, προκύπτει η εξίσωση 1.14 για τη γωνία κατωρεύματος, ενώ παραγωγίζοντας ως προς τη γωνία πρόσπτωσης προκύπτει:
|
|
|
(2.17) |
Μετά τις απαραίτητες αντικαταστάσεις, η εξίσωση (2.13) οδηγεί στην:
|
|
|
(2.18) |
|
|
|
(2.19) |
Ενώ η αντιστοιχία με τη γραμμική έκφραση της ροπής πρόνευσης:
|
|
|
(2.20) |
όπου
|
|
|
(2.21) |
2.2. Συνθήκες ευστάθειας
Όπως προαναφέρθηκε, ο πιλότος προσπαθεί, με κατάλληλους χειρισμούς και κάθε χρονική στιγμή, να διατηρεί το αεροσκάφος αντισταθμισμένο. Έτσι, ρυθμίζει το πηδάλιο ανόδου-καθόδου και την ώση του κινητήρα ώστε από τη μία πλευρά να πετύχει ικανοποιητική άνωση, που θα αντιτίθεται στο βάρος του αεροσκάφους και από την άλλη να αντισταθμίσει την οπισθέλκουσα για την επιθυμητή ταχύτητα πτήσης και γωνία του ίχνους πτήσης.
Εφόσον το σκάφος είναι συμμετρικό ως προς το κατακόρυφο επίπεδο, η πλάγια δύναμη που θα προκύψει είναι μηδενική. Με την προϋπόθεση ότι η ταχύτητα του αεροσκάφους είναι μεγαλύτερη από την ταχύτητα ελάχιστης οπισθέλκουσας - η ισορροπία δυνάμεων του αεροσκάφους δεν διαταράσσεται από τις μεταβολές της ταχύτητας- η στατική ευστάθεια του αεροσκάφους μπορεί να συνοψιστεί στα αποτελέσματα που επιφέρουν οι γωνιακές διαταραχές-και μόνο αυτές γύρω από τους τρεις άξονες. Μετά από την εφαρμογή μιας τέτοιας διαταραχής, οι αεροδυναμικές δυνάμεις και ροπές δεν θα βρίσκονται πλέον σε ισορροπία. Σ’ ένα στατικά ευσταθές αεροσκάφος, οι ροπές που θα προκύψουν, θα το βοηθήσουν να επανέλθει στην αρχική κατάσταση πτήσης. Κατά αυτό τον τρόπο εύκολα μπορεί να προκύψει η συνθήκη ώστε ένα αεροσκάφος να είναι στατικά ευσταθές.
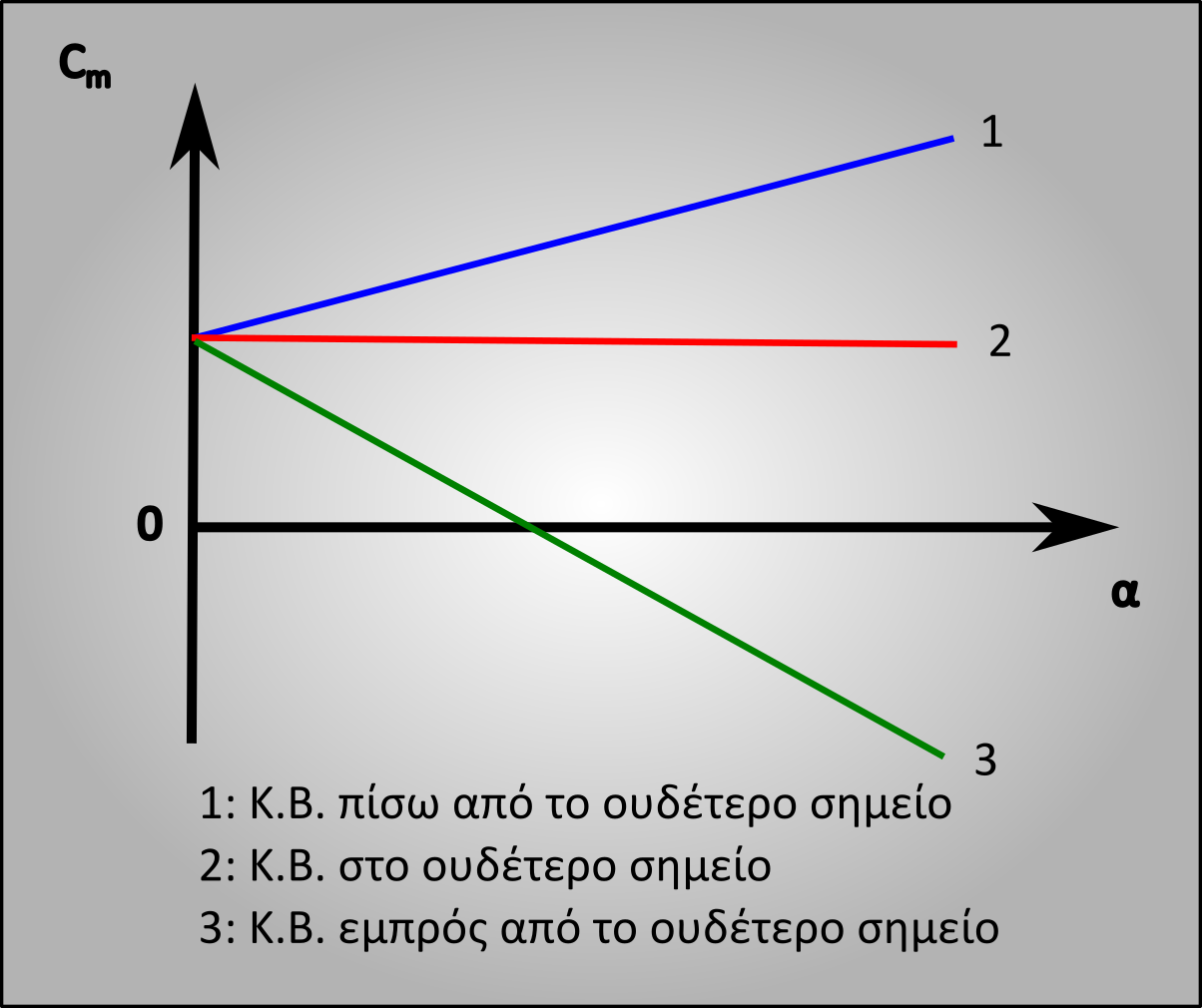
Για την εξαγωγή των συνθηκών, θεωρούμε το ακόλουθο παράδειγμα. Έστω δύο αεροσκάφη των οποίων οι καμπύλες ροπής πρόνευσης ως προς τη γωνία πρόσπτωσης απεικονίζονται στο σχήμα 2.6. Σημειώνεται ότι αναφερόμαστε σε υποηχητική πτήση όπου οι γωνίες πρόσπτωσης είναι γενικά μικρές οπότε η εξάρτηση των συντελεστών ροπής Cm και άνωσης CL από τη γωνία πρόσπτωσης είναι γραμμική. Όπως φαίνεται στο σχήμα 2.6, ο συντελεστής Cm είναι θετικός υπό την έννοια του ρύγχους του αεροσκάφους προς τα πάνω.
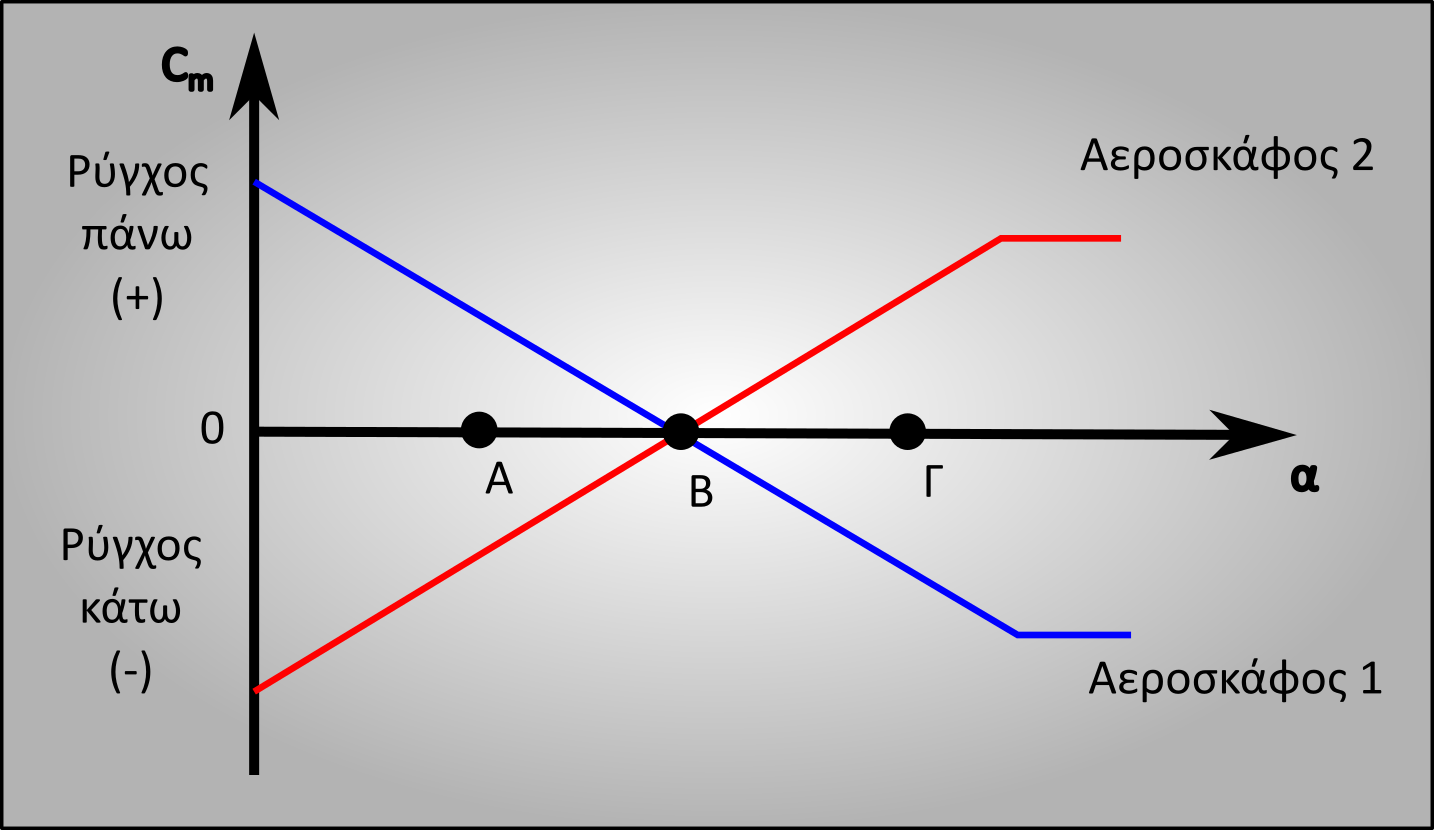
Σχήμα 2.6. Απεικόνιση συνθήκης διαμήκους στατικής ευστάθειας
Το Β είναι το σημείο αντιστάθμισης όπου:
|
|
|
(2.22) |
Παρατηρούμε, ότι στην περίπτωση μιας διαταραχής κατά την οποία αυξάνεται η γωνία πρόσπτωσης πέρα από την αντιστάθμιση, το αεροσκάφος 1, αναπτύσσει αρνητική ροπή η οποία τείνει να το επαναφέρει στη θέση ισορροπίας. Αντιθέτως το αεροσκάφος 2 αναπτύσσει θετική ροπή η οποία τείνει να αυξήσει περαιτέρω τη γωνία πρόσπτωσης. Τα αντίστοιχα ισχύουν και στην αντίστροφη περίπτωση που αντιστοιχεί στο σημείο Α. Μόνο το αεροσκάφος 1 πληροί την προδιαγραφή για στατική ευστάθεια Από αυτό το απλό παράδειγμα μπορεί να εκφραστεί μαθηματικά η συνθήκη διαμήκους στατικής ευστάθειας ως:
|
|
|
(2.23) |
Δηλαδή η καμπύλη της ροπής πρόνευσης ως προς τη γωνία πρόσπτωσης να έχει αρνητική κλίση στην περιοχή του σημείου αντιστάθμισης. Πηγαίνοντας ένα βήμα παρακάτω, πρέπει να ληφθεί υπόψη μία επιπλέον συνθήκη, περίπτωση που φαίνεται στο σχήμα 2.7.
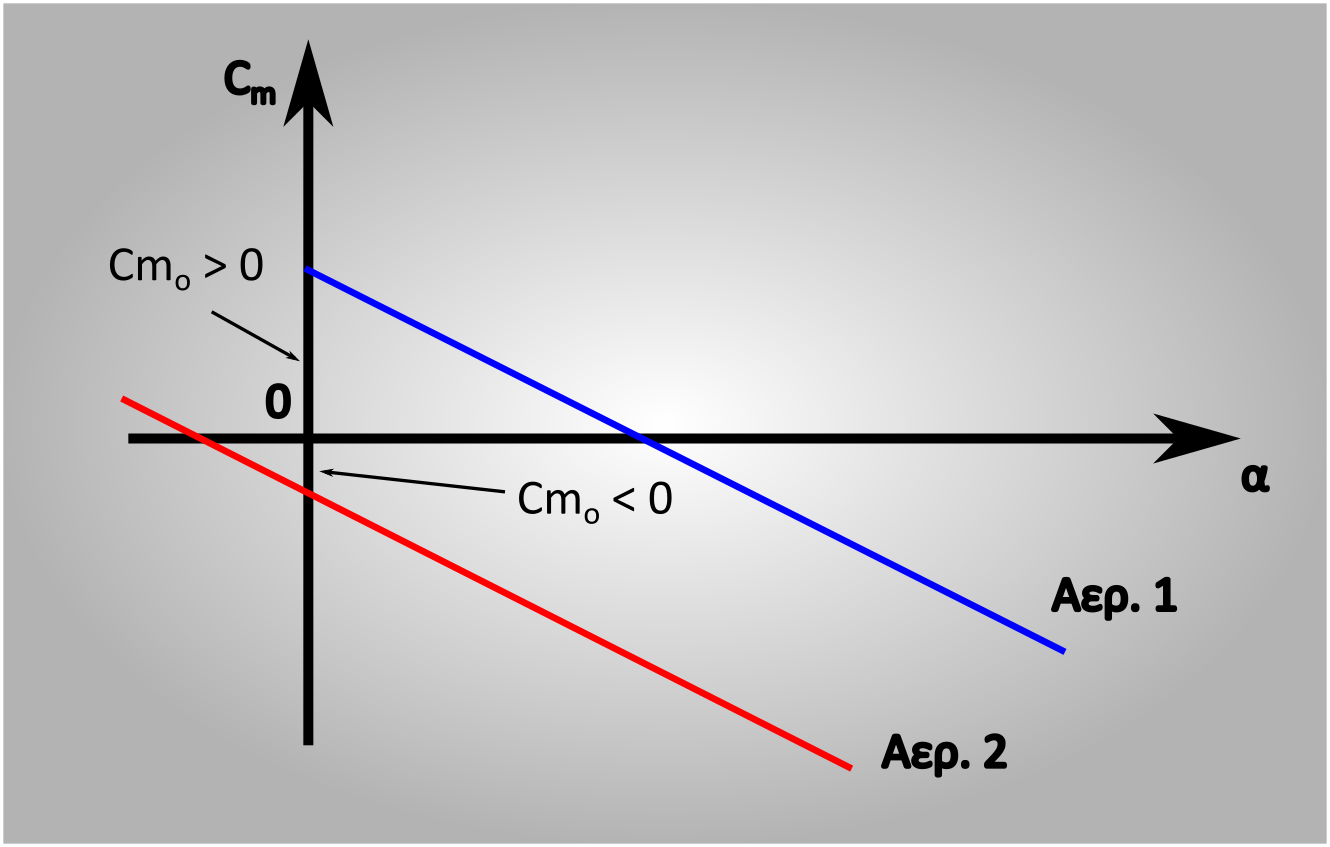
Σχήμα 2.7. Ροπή πρόνευσης ως προς τη γωνία πρόσπτωσης
Για να είναι δυνατή η αντιστάθμιση σε θετικές γωνίες πρόσπτωσης πρέπει ο συντελεστής ροπής μηδενικής άνωσης να είναι θετικός:
|
|
|
(2.24) |
Επίσης, σε περίπτωση που είναι επιθυμητή η έκφραση της ευστάθειας από την καμπύλη Cm-CL η συνθήκη στατικής ευστάθειας, γίνεται:
|
|
|
(2.25) |
Η συσχέτιση μεταξύ των δύο συνθηκών (2.23),(2.25) γίνεται μέσω της έκφρασης:
Εξετάζοντας τη διαμήκη στατική ευστάθεια μόνο για την πτέρυγα, η εισαγωγή της συνθήκης στατικής ευστάθειας γίνεται παραγωγίζοντας την εξίσωση (2.8) ως προς τον συντελεστή άνωσης ή τη γωνία πρόσπτωσης:
|
|
|
(2.27) |
Ενώ για δυνατότητα αντιστάθμισης σε θετική γωνία πρόσπτωσης:
|
|
|
(2.28) |
Άρα πρέπει xac > xcg και ![]() .
Αυτό σημαίνει ότι το αεροδυναμικό κέντρο της πτέρυγας πρέπει να βρίσκεται
κατάντη του κέντρου βάρους, δηλαδή η ροπή πρόνευσης περί το αεροδυναμικό κέντρο
είναι αρνητική. Για να επιτευχθεί θετική ροπή πρόνευσης περί το αεροδυναμικό
κέντρο χρειάζεται αεροτομή αρνητικής καμπύλης. Στα περισσότερα αεροσκάφη δεν
ισχύει αυτό, ενώ είναι σύνηθες το αεροδυναμικό κέντρο να βρίσκεται ανάντη του
κέντρου βάρους. Δηλαδή γενικά η πτέρυγα προκαλεί διαμήκη αστάθεια. Εδώ
εισέρχεται ο ρόλος του οριζόντιου σταθερού ουραίου πτερυγίου.
.
Αυτό σημαίνει ότι το αεροδυναμικό κέντρο της πτέρυγας πρέπει να βρίσκεται
κατάντη του κέντρου βάρους, δηλαδή η ροπή πρόνευσης περί το αεροδυναμικό κέντρο
είναι αρνητική. Για να επιτευχθεί θετική ροπή πρόνευσης περί το αεροδυναμικό
κέντρο χρειάζεται αεροτομή αρνητικής καμπύλης. Στα περισσότερα αεροσκάφη δεν
ισχύει αυτό, ενώ είναι σύνηθες το αεροδυναμικό κέντρο να βρίσκεται ανάντη του
κέντρου βάρους. Δηλαδή γενικά η πτέρυγα προκαλεί διαμήκη αστάθεια. Εδώ
εισέρχεται ο ρόλος του οριζόντιου σταθερού ουραίου πτερυγίου.
Από την άλλη, το οριζόντιο ουραίο πτερύγιο επιδρά θετικά στον
συνολικό ![]() του
αεροσκάφους με τη ρύθμιση της τοπικής γωνίας πρόσπτωσης
του
αεροσκάφους με τη ρύθμιση της τοπικής γωνίας πρόσπτωσης ![]() .
Όσον αφορά τη συνεισφορά του στη στατική ευστάθεια:
.
Όσον αφορά τη συνεισφορά του στη στατική ευστάθεια:
|
|
|
(2.29) |
Δηλαδή αυτή η συνθήκη ικανοποιείται πάντα εφόσον τα VH και η είναι εξ’ ορισμού θετικά μεγέθη, άρα ο ρόλος του ουραίου πτερυγίου είναι σταθεροποιητικός. Παράλληλα ο πιο εμφανής τρόπος ρύθμισης της συνεισφοράς του ουραίου στην ευστάθεια, είναι είτε με το μήκος του βραχίονα ροπής lt είτε με την επιφάνεια του ουραίου πτερυγίου St.
2.3. Βαθμός ευστάθειας
Το μέγεθος της κλίσης των διαγραμμάτων Cm-CL ή Cm-α καθορίζει τον βαθμό ευστάθειας που διαθέτει το αεροσκάφος. Οι μεταβολές στον βαθμό της ευστάθειας απεικονίζονται στο σχήμα 2.8.
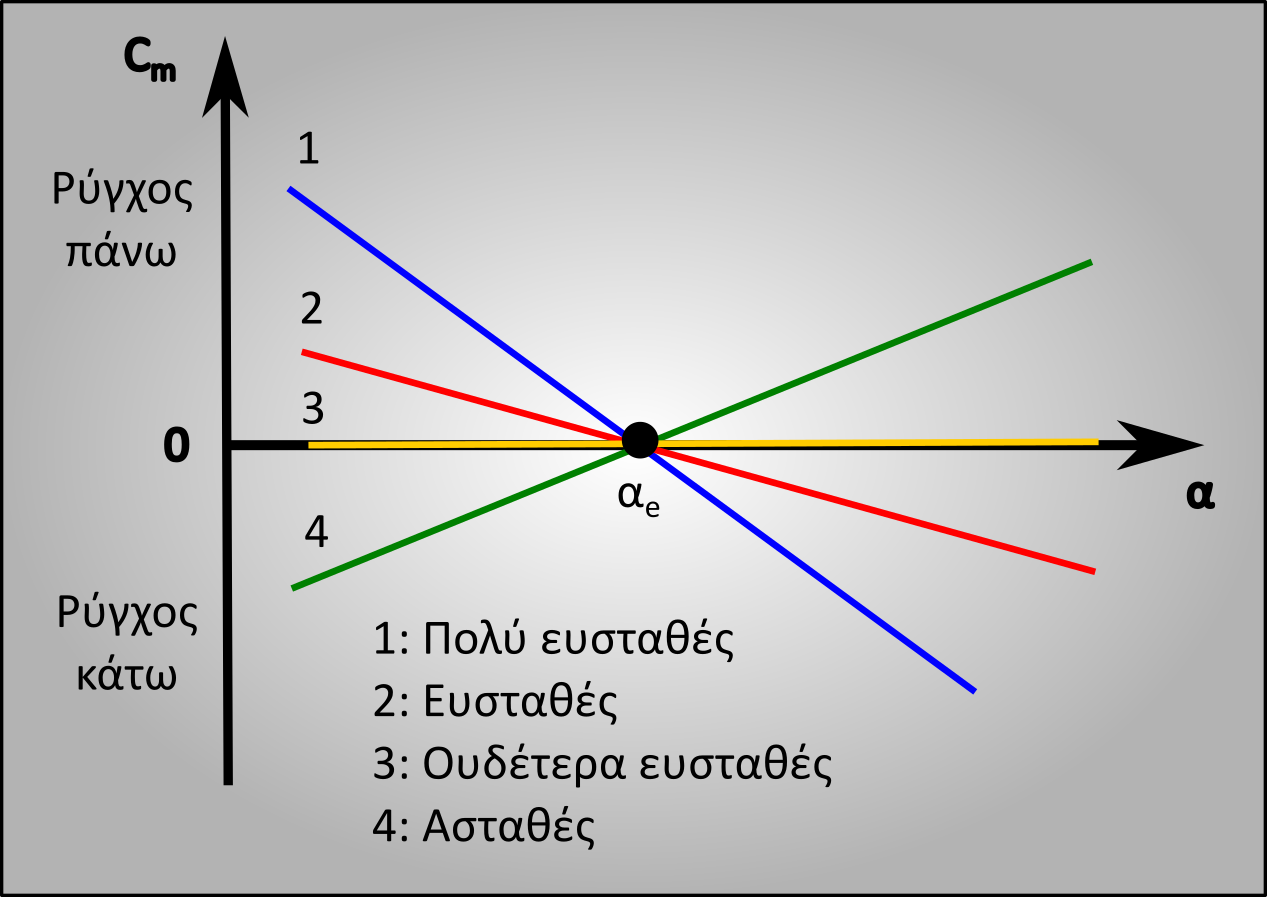
Σχήμα 2.8 Βαθμός ευστάθειας στο διάγραμμα συντελεστή ροπής πρόνευσης – γωνίας πρόσπτωσης
Ο βαθμός της ευστάθειας περιγράφεται με τον όρο «περιθώριο ευστάθειας», το οποίο ουσιαστικά εκφράζει πόση ευστάθεια, περισσότερη από την ουδέτερη, διαθέτει το αεροσκάφος. Έτσι, το διάμηκες περιθώριο στατικής ευστάθειας σχετίζεται άμεσα με την κλίση του διαγράμματος Cm - α.
Παρατηρώντας το σχήμα 2.8 είναι φανερό ότι για μια δεδομένη διαταραχή στη γωνία πρόσπτωσης α, η προκύπτουσα ροπή αποκατάστασης (restoring moment) Cm είναι η μέγιστη όταν αναφερόμαστε σε ένα πολύ ευσταθές αεροσκάφος. Το μέγεθος της ροπής αποκατάστασης ελαττώνεται, καθώς μειώνεται ο βαθμός της ευστάθειας-ή το περιθώριο ευστάθειας-και γίνεται μηδέν στην ουδέτερη ευστάθεια. Όταν το αεροσκάφος είναι ασταθές η ροπή έχει αντίθετο πρόσημο και προφανώς προκαλεί απόκλιση. Επομένως όσο μεγαλύτερος ο βαθμός ευστάθειας τόσο μεγαλύτερη είναι η ροπή αποκατάστασης που ακολουθεί τη διαταραχή. Αυτό σημαίνει ότι ένα πολύ ευσταθές αεροσκάφος θα ανθίσταται σημαντικά στη διαταραχή, άρα θα απαιτείται μεγαλύτερη δράση ελέγχου ώστε το αεροσκάφος να μεταβάλλει την κατάσταση αντιστάθμισης, δηλαδή να ελιχθεί. Συνεπώς, ο μεγάλος βαθμός ευστάθειας μπορεί να είναι το ίδιο ανεπιθύμητος με τη λίγη ευστάθεια, καθώς στην πρώτη περίπτωση η διαθέσιμη ισχύς ελέγχου θα είναι περιορισμένη.
Όσον αφορά τα σύγχρονα υπερηχητικά αεροσκάφη υψηλών επιδόσεων, οι εκτεταμένοι φάκελοι πτήσης (Κεφ. 7, υποκεφάλαιο 5.4) και οι σημαντικές μεταβολές στις συνθήκες πτήσης είναι δυνατό να οδηγήσουν σε δραματικές μεταβολές της στατικής ευστάθειας. Για παράδειγμα είναι δυνατό, ένα τέτοιο αεροσκάφος να είναι ευσταθές σε κάποιες συνθήκες πτήσης και ασταθές σε κάποιες άλλες. Τέτοιες μεταβολές προκύπτουν από τα αποτελέσματα της εφαρμογής της ισχύος στους κινητήρες, από την ύπαρξη οπισθόκλισης στις πτέρυγες, από τη γεωμετρία του αεροσκάφους, από τα φαινόμενα της αεροελαστικότητας κλπ.
Θα πρέπει να σημειωθεί ότι για τα περισσότερα αεροσκάφη η χαρακτηριστική καμπύλη της ροπής πρόνευσης εμφανίζει την τάση για μη γραμμικότητα σε υψηλότερες τιμές του συντελεστή άνωσης. Σε εξαιρετικές περιπτώσεις η ευστάθεια ενός αεροσκάφους μπορεί να αντιστραφεί σε υψηλές τιμές του συντελεστή άνωσης, κάτι που μοιραία οδηγεί σε ασταθή άνοδο της κεφαλής του αεροσκάφους.
2.4. Ευστάθεια με τα χειριστήρια σταθεροποιημένα (controls fixed)
Η κατάσταση που προσδιορίζεται με τον όρο «χειριστήρια σταθεροποιημένα» αντιπροσωπεύει εκείνες τις συνθήκες όπου το πηδάλιο ανόδου-καθόδου διατηρείται σταθερό στη θέση που αναλογεί στις επικρατούσες συνθήκες αντιστάθμισης. Από πρακτική άποψη αυτό σημαίνει ότι ο πιλότος πετά το αεροσκάφος με τα χέρια του πάνω στα χειριστήρια και μάλιστα τα κρατά σταθερά σε συγκεκριμένες θέσεις που αντιστοιχούν στην αντιστάθμιση. Αυτό φυσικά προϋποθέτει ότι το αεροσκάφος είναι ευσταθές και διατηρείται αντισταθμισμένο.
Αφού εξετάστηκε αναλυτικά η επίδραση της πτέρυγας και του ουραίου πτερυγίου στη ροπή πρόνευσης, μπορεί να διατυπωθεί η έκφραση της συνολικής ροπής. Υπενθυμίζεται ότι η επίδραση της ατράκτου αμελήθηκε θεωρώντας ότι είναι μικρή σχετικά με την επίδραση της πτέρυγας και του ουραίου. Έτσι, η συνολική ροπή πρόνευσης εκφράζεται ως:
|
|
|
(2.30) |
όπου
|
|
|
(2.31) |
|
|
|
(2.32) |
Η κλίση όμως ![]() της καμπύλης της ροπής ως προς τη γωνία πρόσπτωσης εξαρτάται
τόσο από τη θέση του κέντρου βάρους όσο και από τα αεροδυναμικά χαρακτηριστικά
του αεροσκάφους. Το κέντρο βάρους μετακινείται κατά τη διάρκεια της πτήσης. Συνεπώς
είναι αναγκαίο να εντοπιστεί τα όρια μέσα στα οποία πρέπει να μπορεί να κινηθεί
ώστε το αεροσκάφος να διατηρεί τη διαμήκη στατική του ευστάθεια. Για να
εντοπιστεί το σημείο όπου το αεροσκάφος από στατικά ευσταθές γίνεται ουδέτερα
ευσταθές –ουδέτερο σημείο- επιλύεται η εξίσωση (2.32) του
της καμπύλης της ροπής ως προς τη γωνία πρόσπτωσης εξαρτάται
τόσο από τη θέση του κέντρου βάρους όσο και από τα αεροδυναμικά χαρακτηριστικά
του αεροσκάφους. Το κέντρο βάρους μετακινείται κατά τη διάρκεια της πτήσης. Συνεπώς
είναι αναγκαίο να εντοπιστεί τα όρια μέσα στα οποία πρέπει να μπορεί να κινηθεί
ώστε το αεροσκάφος να διατηρεί τη διαμήκη στατική του ευστάθεια. Για να
εντοπιστεί το σημείο όπου το αεροσκάφος από στατικά ευσταθές γίνεται ουδέτερα
ευσταθές –ουδέτερο σημείο- επιλύεται η εξίσωση (2.32) του ![]() ως
προς την απόσταση του κέντρου βάρους από την ακμή εκφυγής
ως
προς την απόσταση του κέντρου βάρους από την ακμή εκφυγής ![]() (Neutral Point)
για
(Neutral Point)
για ![]() =
0 και προκύπτει:
=
0 και προκύπτει:
|
|
|
(2.33) |
Να σημειωθεί επίσης, ότι αγνοήθηκε και η επίδραση της μετακίνησης
του κέντρου βάρους στον ![]() .
Έτσι, ορίζεται το ουδέτερο σημείο με τα χειριστήρια σταθεροποιημένα όπου το
αεροσκάφος είναι ουδέτερα ευσταθές. Αν το κέντρο βάρους μετακινηθεί πέρα από το
σημείο αυτό, το αεροσκάφος γίνεται στατικά ασταθές. Στο σχήμα φαίνεται η
επίδραση του κέντρου βάρους στην κλίση της καμπύλης Cm – α και συνεπώς στη διαμήκη στατική ευστάθεια.
.
Έτσι, ορίζεται το ουδέτερο σημείο με τα χειριστήρια σταθεροποιημένα όπου το
αεροσκάφος είναι ουδέτερα ευσταθές. Αν το κέντρο βάρους μετακινηθεί πέρα από το
σημείο αυτό, το αεροσκάφος γίνεται στατικά ασταθές. Στο σχήμα φαίνεται η
επίδραση του κέντρου βάρους στην κλίση της καμπύλης Cm – α και συνεπώς στη διαμήκη στατική ευστάθεια.
Σχήμα 2.9 Επίδραση της θέσης του κέντρου βάρους στη διαμήκη στατική ευστάθεια
Για ένα ευσταθές αεροσκάφος το περιθώριο ευστάθειας είναι θετικό
και όσο πιο μεγάλη τιμή έχει τόσο μεγαλύτερη είναι η ευστάθεια που διαθέτει
αυτό το αεροσκάφος. Παρατηρώντας το σχήμα 2.9 είναι φανερό ότι το αεροσκάφος θα
είναι ευσταθές εφόσον η θέση του κέντρου βάρους είναι εμπρός από τη θέση του
ουδέτερου σημείου (![]() )
όπου και η κλίση της καμπύλης είναι αρνητική. Τα αποδεκτά όρια ευστάθειας του
αεροσκάφους καθορίζουν και το εύρος μετακίνησης του κέντρου βάρους. Το οπίσθιο
όριο συχνά αντιστοιχεί στο ουδέτερο σημείο ενώ το εμπρόσθιο όριο καθορίζεται
από το μέγιστο επιτρεπτό περιθώριο ευστάθειας.
)
όπου και η κλίση της καμπύλης είναι αρνητική. Τα αποδεκτά όρια ευστάθειας του
αεροσκάφους καθορίζουν και το εύρος μετακίνησης του κέντρου βάρους. Το οπίσθιο
όριο συχνά αντιστοιχεί στο ουδέτερο σημείο ενώ το εμπρόσθιο όριο καθορίζεται
από το μέγιστο επιτρεπτό περιθώριο ευστάθειας.
3. Διαμήκης Έλεγχος και πηδάλιο ανόδου-καθόδου
Όπως προαναφέρθηκε, για να μπορεί το αεροσκάφος να πετά και να εκτελεί ελιγμούς σε διάφορες συνθήκες, πέρα από τις απαιτήσεις ισχύος, είναι απαραίτητη η ύπαρξη ενός συστήματος ελέγχου. Αυτός ο έλεγχος επιτυγχάνεται με την άνωση που παρέχουν κατ’ επιλογή, κατάλληλες αεροδυναμικές επιφάνειες τοποθετημένες σε διάφορα σημεία του αεροσκάφους. Τα κινούμενα αυτά πτερύγια ελέγχου προκαλούν αντίστοιχες ροπές ανάλογα με την απόσταση τους από το κέντρο βάρους.
Όσον αφορά τον διαμήκη έλεγχο, η προσοχή εστιάζεται στην πρόνευση, της οποίας ο έλεγχος γίνεται με το πηδάλιο ανόδου- καθόδου. Οι προδιαγραφές που πρέπει να πληρούνται κατά τον σχεδιασμό ενός τέτοιου πηδαλίου είναι:
• Αποδοτικότητα ελέγχου: εξαρτάται από το μέγεθος του πτερυγίου και τον λόγο όγκου του οριζόντιου σταθερού ουραίου πτερυγίου VΗ.
• Ροπές στις αρθρώσεις: οι αεροδυναμικές ροπές που ασκούνται στις αρθρώσεις μεταξύ του πηδαλίου ανόδου-καθόδου και του οριζόντιου σταθερού πτερυγίου και οι οποίες πρέπει να υπερνικηθούν κατά τη μετακίνηση του.
• Αεροδυναμική ισορροπία και ισορροπία μάζας.
3.1. Αποδοτικότητα πηδαλίου ανόδου – καθόδου
Εφόσον το οριζόντιο σταθερό πτερύγιο ελέγχει την πρόνευση, θα διερευνηθεί πως το πηδάλιο ανόδου – καθόδου συμβάλει στη δημιουργία των απαιτούμενων δυνάμεων άνωσης που προκαλούν τις κατάλληλες ροπές περί το κέντρο βάρους με αποτέλεσμα τη μεταβολή της πρόνευσης.
Το σχήμα 2.10. δείχνει πως η γωνία εκτροπής δe του πηδαλίου ανόδου-καθόδου επηρεάζει την καμπύλη Cm - α ή Cm – CL. Παρατηρείται ότι δεν επηρεάζει την κλίση της καμπύλης αλλά μετακινεί την καμπύλη με τέτοιο τρόπο που να επιτρέπει την αντιστάθμιση σε διάφορες γωνίες πρόσπτωσης.
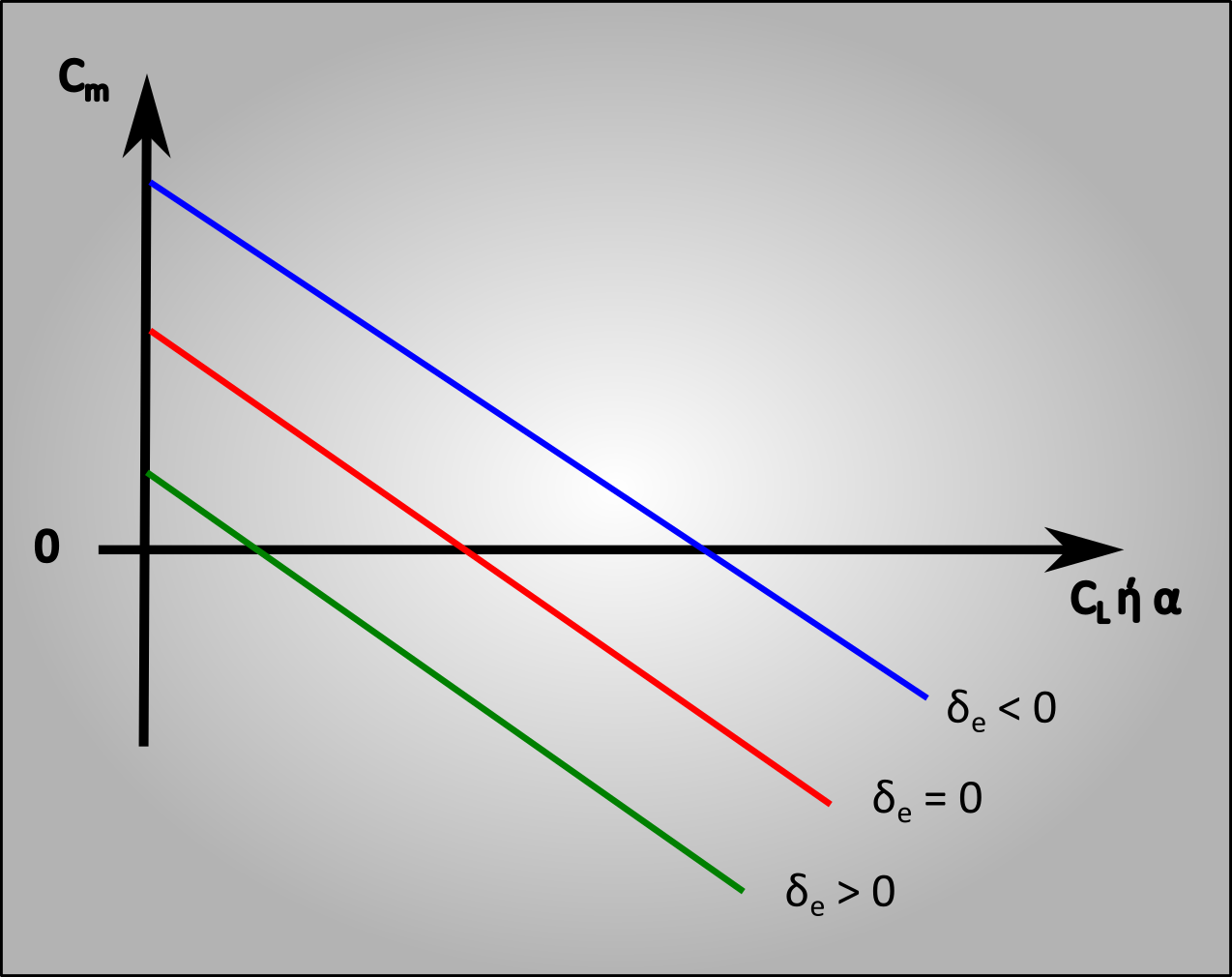
Σχήμα 2.10. Επίδραση της κλίσης του πηδαλίου ανόδου – καθόδου στην καμπύλη Cm – α,CL
Στη συνέχεια πρέπει να εξεταστούν οι μεταβολές των συνολικών δυνάμεων και ροπών που προκαλεί μια στροφή δe του πηδαλίου.
Η μεταβολή της συνολικής άνωσης του αεροσκάφους εκφράζεται ως:
|
|
|
(2.34) |
Δηλαδή:
|
|
|
(2.35) |
Ενώ η μεταβολή στη συνολική ροπή πρόνευσης είναι:
|
|
|
(2.36) |
Η παράγωγος ευστάθειας ![]() ορίζεται
ως η ισχύς έλεγχου του πηδαλίου ανόδου – καθόδου και όσο μεγαλώνει αντιστοιχεί
σε πιο αποτελεσματικό έλεγχο. Τότε η εξίσωση της συνολικής ροπής πρόνευσης
γίνεται:
ορίζεται
ως η ισχύς έλεγχου του πηδαλίου ανόδου – καθόδου και όσο μεγαλώνει αντιστοιχεί
σε πιο αποτελεσματικό έλεγχο. Τότε η εξίσωση της συνολικής ροπής πρόνευσης
γίνεται:
|
|
|
(2.37) |
Αφού εκφράστηκαν οι μεταβολές που προκαλεί η κλίση του πηδαλίου,
εξετάζεται η συσχέτιση των παραγώγων ![]() και
και
![]() με
τα γεωμετρικά χαρακτηριστικά του οριζόντιου σταθερού πτερυγίου. Εφόσον η
μεταβολή στη συνολική άνωση είναι η μεταβολή που ασκείται στο οριζόντιο σταθερό
πτερύγιο:
με
τα γεωμετρικά χαρακτηριστικά του οριζόντιου σταθερού πτερυγίου. Εφόσον η
μεταβολή στη συνολική άνωση είναι η μεταβολή που ασκείται στο οριζόντιο σταθερό
πτερύγιο:
|
|
|
(2.38) |
προκύπτει η σχέση:
|
|
|
(2.39) |
όπου η παράγωγος ![]() ορίζεται
ως η αποδοτικότητα του πηδαλίου ανόδου-καθόδου, είναι ανάλογη του μεγέθους του
πτερυγίου και μπορεί να υπολογιστεί από την εξίσωση (2.40):
ορίζεται
ως η αποδοτικότητα του πηδαλίου ανόδου-καθόδου, είναι ανάλογη του μεγέθους του
πτερυγίου και μπορεί να υπολογιστεί από την εξίσωση (2.40):
Η παράμετρος τ μπορεί να καθοριστεί από πειραματικά δεδομένα, όπως στο σχήμα 2.11:
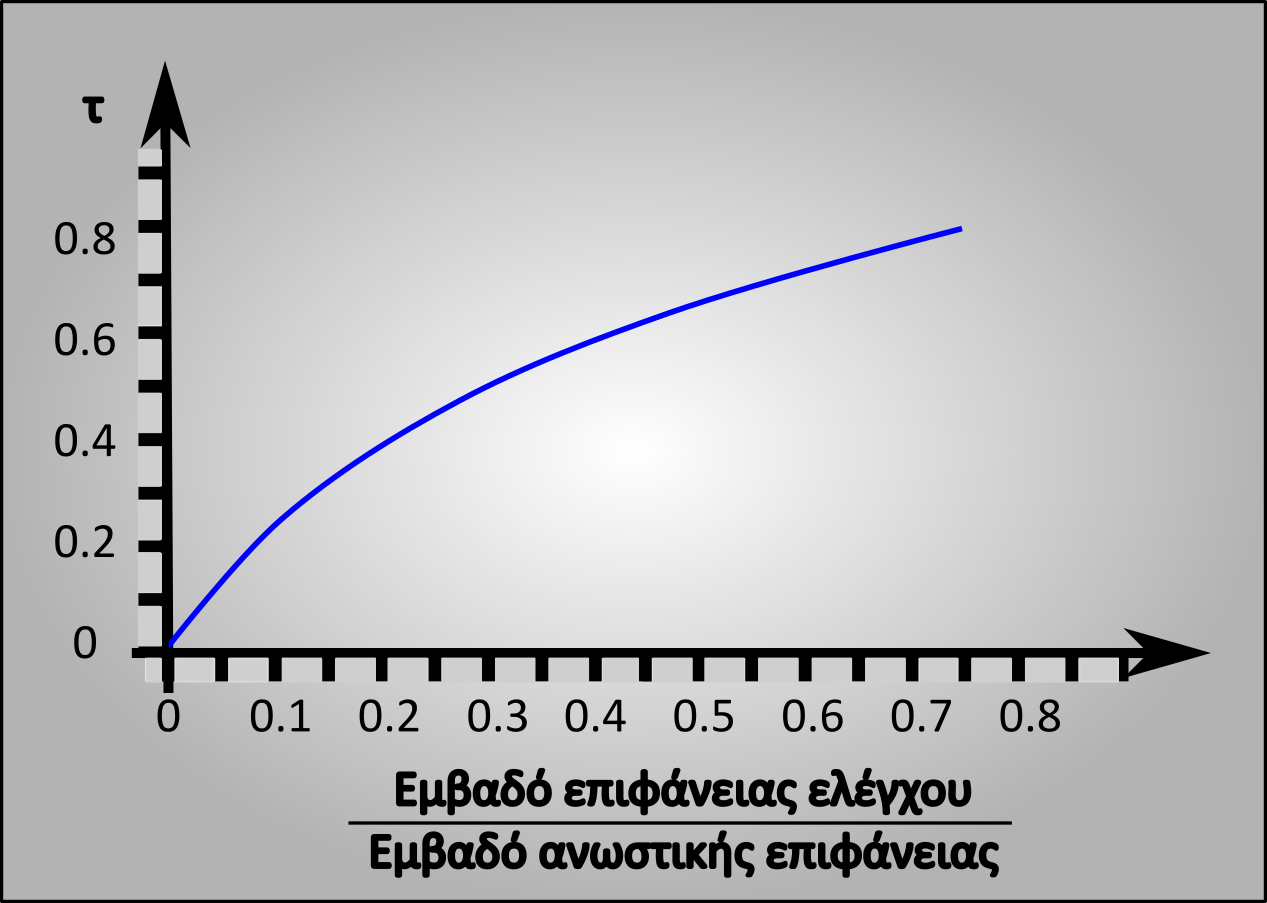
Σχήμα 2.11 Καμπύλη παραμέτρου τ ως προς το εμβαδό ανωστικής επιφάνειας του πηδαλίου
Τότε η παράγωγος του συντελεστή της συνολικής άνωσης ως προς τη γωνία του πηδαλίου ανόδου – καθόδου εκφράζεται ως:
|
|
|
(2.41) |
Όσον αφορά τη συσχέτιση της μεταβολής της συνολικής ροπής πρόνευσης με τα γεωμετρικά μεγέθη, ισχύει:
|
|
|
(2.42) |
Ή ως έκφραση παραγώγου:
|
|
|
(2.43) |
Προφανώς ο σχεδιαστής μπορεί να επιλέξει την αποδοτικότητα του πηδαλίου ανόδου–καθόδου με την κατάλληλη επιλογή του μεγέθους του πτερυγίου και του λόγου του όγκου του.
3.2. Γωνία αντιστάθμισης πηδαλίου ανόδου – καθόδου
Όπως ορίστηκε στην αρχή του κεφαλαίου, στο αντισταθμισμένο αεροσκάφος υπάρχει ισορροπία δυνάμεων. Άρα από την εξίσωση 2.37 του συντελεστή της ροπής πρόνευσης:
|
|
|
(2.44) |
Επιλύοντας ως προς τη γωνία του πηδαλίου, προκύπτει:
|
|
|
(2.45) |
όπου ως δtrim ορίζεται ως η γωνία αντιστάθμισης του πηδαλίου ανόδου-καθόδου. Επίσης, ο συντελεστής άνωσης στην αντιστάθμιση εκφράζεται ως:
|
|
|
(2.46) |
Συνεπώς η γωνία πρόσπτωσης αντιστάθμισης προκύπτει ως:
|
|
|
(2.47) |
Αντικαθιστώντας τις ανωτέρω εκφράσεις στην εξίσωση 2.45 λαμβάνεται η τελική έκφραση για τη γωνία αντιστάθμισης πηδαλίου ανόδου – καθόδου:
|
|
|
(2.48) |
3.3. Ευστάθεια με τα χειριστήρια ελεύθερα (controls free)
Η κατάσταση που περιγράφεται με τον όρο «χειριστήρια ελεύθερα» αναφέρεται στις συνθήκες στις οποίες το πηδάλιο ανόδου καθόδου είναι ελεύθερο να «πλέει» (floating) σε μια γωνία που αντιστοιχεί στην επικρατούσα συνθήκη αντιστάθμισης. Στην πράξη αυτό σημαίνει ότι ο πιλότος μπορεί να πετά το αεροσκάφος με τα χέρια του μακριά από τα χειριστήρια, καθώς το αεροσκάφος διατηρεί τα στοιχεία της πτήσης του. Υποτίθεται ότι και σε αυτή την περίπτωση, το αεροσκάφος που εξετάζεται είναι ευσταθές, διαφορετικά θα απέκλινε με την απελευθέρωση των χειριστηρίων.
Αυτή η κατάσταση είναι δυνατό να επιτευχθεί μόνο εφόσον τα χειριστήρια μπορούν να ρυθμιστούν, έτσι ώστε το πηδάλιο ανόδου-καθόδου να πλέει στη σωστή γωνία που αντιστοιχεί στην επιθυμητή κατάσταση πτήσης. Αυτό καθίσταται δυνατό με τη συνεχή ρύθμιση του αντισταθμιστικού πηδαλίου, έως ότου το αεροσκάφος αντισταθμιστεί πλήρως. Έτσι, η ευστάθεια με τα χειριστήρια ελεύθερα αφορά το αντισταθμιστικό πηδάλιο και τα χαρακτηριστικά ελέγχου του.
3.4. Ροπές στις αρθρώσεις του πηδαλίου ανόδου - καθόδου
Ο πιλότος ασκώντας δύναμη στα χειριστήρια μετακινεί το πηδάλιο ανόδου – καθόδου. Για να γίνει αυτό πρέπει να υπερνικήσει τις ροπές στις αρθρώσεις του πηδαλίου. Οπότε η γνώση αυτών των ροπών είναι σημαντική, καθώς πρέπει η απαιτούμενη από τον πιλότο δύναμη να είναι σε λογικά πλαίσια ώστε να μην είναι κουραστική. Οι ροπές αυτές ορίζονται στο σχήμα 2.12:
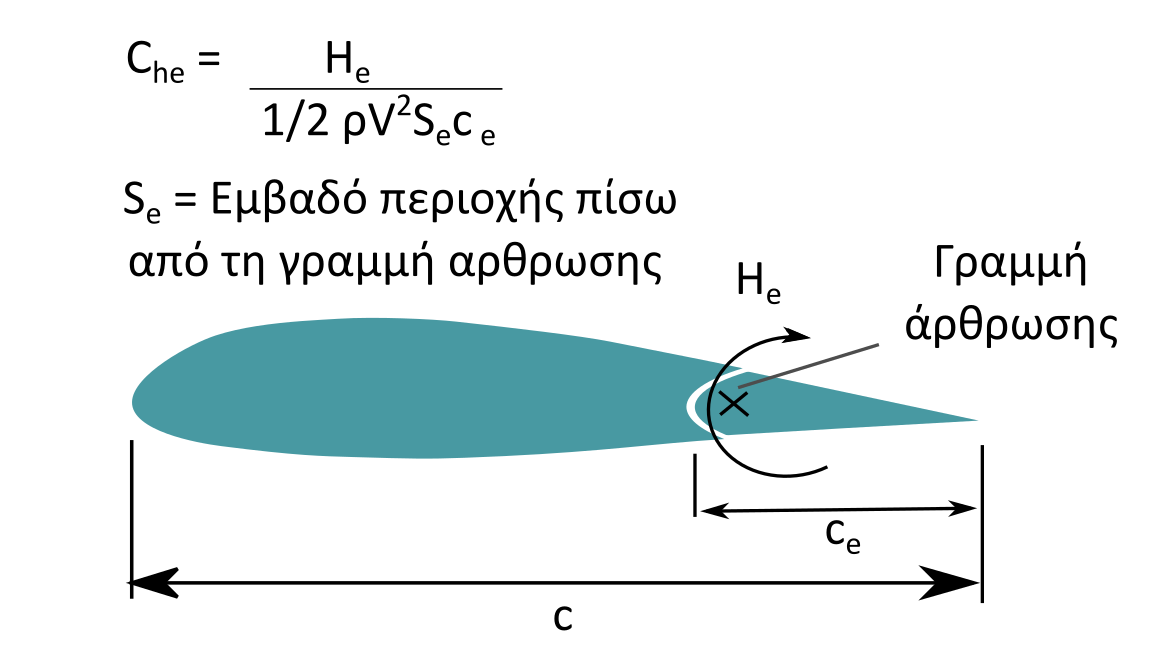
Σχήμα 2.12 Ροπές στην άρθρωση του πηδαλίου ανόδου - καθόδου
Υποτίθεται ότι η ροπή στην άρθρωση είναι αποτέλεσμα της δράσης της γωνίας πρόσπτωσης αt, της γωνίας εκτοπισμού δe του πηδαλίου ανόδου – καθόδου και της γωνίας εκτοπισμού δtab του αντισταθμιστικού πηδαλίου ξεχωριστά και μπορεί να εκφραστεί υπό την εξής μορφή:
|
|
|
(2.49) |
όπου
•
![]() :
η παραμένουσα ροπή,
:
η παραμένουσα ροπή,
•
![]() ,
,
![]() ,
,
![]() :
οι παράμετροι της ροπής στην άρθρωση.
:
οι παράμετροι της ροπής στην άρθρωση.
Ο υπολογισμός των παραμέτρων της εξίσωσης (2.49) είναι δύσκολο να γίνει με ακρίβεια αναλυτικά. Για το λόγο αυτό οι παράμετροι συνήθως λαμβάνονται από πειραματικά δεδομένα σε αεροδυναμική σήραγγα.
Στην περίπτωση πλέον που ο πιλότος αφήνει ελεύθερα τα χειριστήρια του πηδαλίου ανόδου – καθόδου πρέπει να ελεγχθεί το πώς επηρεάζεται η διαμήκης στατική ευστάθεια και ο έλεγχος του αεροσκάφους. Για απλότητα των εξισώσεων σαν πρώτη προσέγγιση θεωρείται ότι ισχύει:
|
|
|
(2.50) |
Τότε εφόσον τα χειριστήρια είναι ελεύθερα ισχύει:
|
|
|
(2.51) |
Επιλύοντας την 2.51 ως προς τη γωνία του πηδαλίου ανόδου–καθόδου, προκύπτει:
|
|
|
(2.52) |
Συνήθως, οι παράμετροι ![]() ,
,
![]() είναι
αρνητικές. Σε αυτή την περίπτωση από την εξίσωση (2.52) φαίνεται το πηδάλιο να
«πλέει» προς τα πάνω όταν η γωνία πρόσπτωσης αt αυξάνεται. Χρησιμοποιώντας την έκφραση αυτή, ο
συντελεστής άνωσης του οριζόντιου σταθερού προκύπτει:
είναι
αρνητικές. Σε αυτή την περίπτωση από την εξίσωση (2.52) φαίνεται το πηδάλιο να
«πλέει» προς τα πάνω όταν η γωνία πρόσπτωσης αt αυξάνεται. Χρησιμοποιώντας την έκφραση αυτή, ο
συντελεστής άνωσης του οριζόντιου σταθερού προκύπτει:
|
|
|
(2.53) |
Αντικαθιστώντας την 2.52 στην 2.53 προκύπτει:
|
|
|
(2.54) |
Ή σε πιο συμπτυγμένη μορφή:
|
|
|
(2.55) |
όπου
|
|
|
(2.56) |
Ο παράγοντας f επηρεάζει την κλίση της καμπύλης άνωσης – γωνίας πρόσπτωσης του οριζόντιου σταθερού και μπορεί να λαμβάνει τιμές είτε μικρότερες είτε μεγαλύτερες της μονάδας, ανάλογα με το πρόσημο των παραμέτρων της ροπής στην άρθρωση.
Συνδυάζοντας τις εξισώσεις (2.55), (2.56) με τις εξισώσεις (2.9) και (2.13), οι συνολικοί συντελεστές της ροπής πρόνευσης για την περίπτωση που τα χειριστήρια είναι ελεύθερα, εκφράζονται ως:
|
|
|
(2.57) |
|
|
|
(2.58) |
Η επίδραση στη διαμήκη στατική ευστάθεια, όταν τα χειριστήρια είναι
ελεύθερα προκύπτει εάν τεθεί ![]() και
επιλυθεί η εξίσωση ως προς τη θέση του κέντρου βάρους:
και
επιλυθεί η εξίσωση ως προς τη θέση του κέντρου βάρους:
|
|
|
(2.59) |
όπου ![]() το
ουδέτερο σημείο με τα χειριστήρια ελεύθερα.
το
ουδέτερο σημείο με τα χειριστήρια ελεύθερα.
Όπως και στην περίπτωση με τα χειριστήρια σταθεροποιημένα, έτσι
και εδώ το ![]() ,
είναι η απόσταση από την ακμή εκφυγής, την οποία αν το κέντρο βάρους υπερβεί,
το αεροσκάφος γίνεται στατικά ασταθές.
,
είναι η απόσταση από την ακμή εκφυγής, την οποία αν το κέντρο βάρους υπερβεί,
το αεροσκάφος γίνεται στατικά ασταθές.
3.5. Στατικό περιθώριο ευστάθειας
Με τον όρο «στατικό περιθώριο» εκφράζεται η απόσταση του κέντρου βάρος από το ουδέτερο σημείο, δηλαδή το περιθώριο που έχει για να μετακινηθεί το κέντρο βάρους ώστε το αεροσκάφος να παραμένει στατικά ευσταθές. Αφού ορισθεί και το ουδέτερο σημείο για την περίπτωση με τα χειριστήρια ελεύθερα, προκύπτει η διαφορά μεταξύ των δύο καταστάσεων (εξίσωση 2.33, 2.59):
|
|
|
(2.60) |
Παρατηρείται ότι ο παράγοντας f καθορίζει τη θέση του ![]() σχετικά
με το
σχετικά
με το ![]() .
Τα στατικά περιθώρια στις δύο περιπτώσεις ορίζονται ως εξής:
.
Τα στατικά περιθώρια στις δύο περιπτώσεις ορίζονται ως εξής:
•
Χειριστήρια σταθεροποιημένα:![]() .
.
•
Χειριστήρια ελεύθερα:![]() .
.
3.6. Δυνάμεις στα χειριστήρια
Ανάλογα με την επιφάνεια που θέλει να εκτοπίσει ο πιλότος, θα χρησιμοποιήσει τα αντίστοιχα χειριστήρια ή πεντάλ. Η δύναμη που απαιτείται να ασκήσει για αυτές τις ενέργειες, είναι ανάλογη της ροπής στην άρθρωση της εκάστοτε επιφάνειας ελέγχου. Χαρακτηριστικό παράδειγμα είναι ο διαμήκης έλεγχο μέσω του πηδάλιο ανόδου-καθόδου, όπου η δύναμη που πρέπει να ασκήσει είναι ανάλογη της ροπής στην άρθρωση:
![]()
Στο σχήμα 2.13 παρουσιάζεται μία απλοποιημένη μορφή του συστήματος ελέγχου του πηδαλίου ανόδου-καθόδου. Εξισώνοντας το έργο μετακίνησης του χειριστηρίου με το έργο εκτοπισμού του πηδαλίου στην επιθυμητή γωνία προκύπτει:
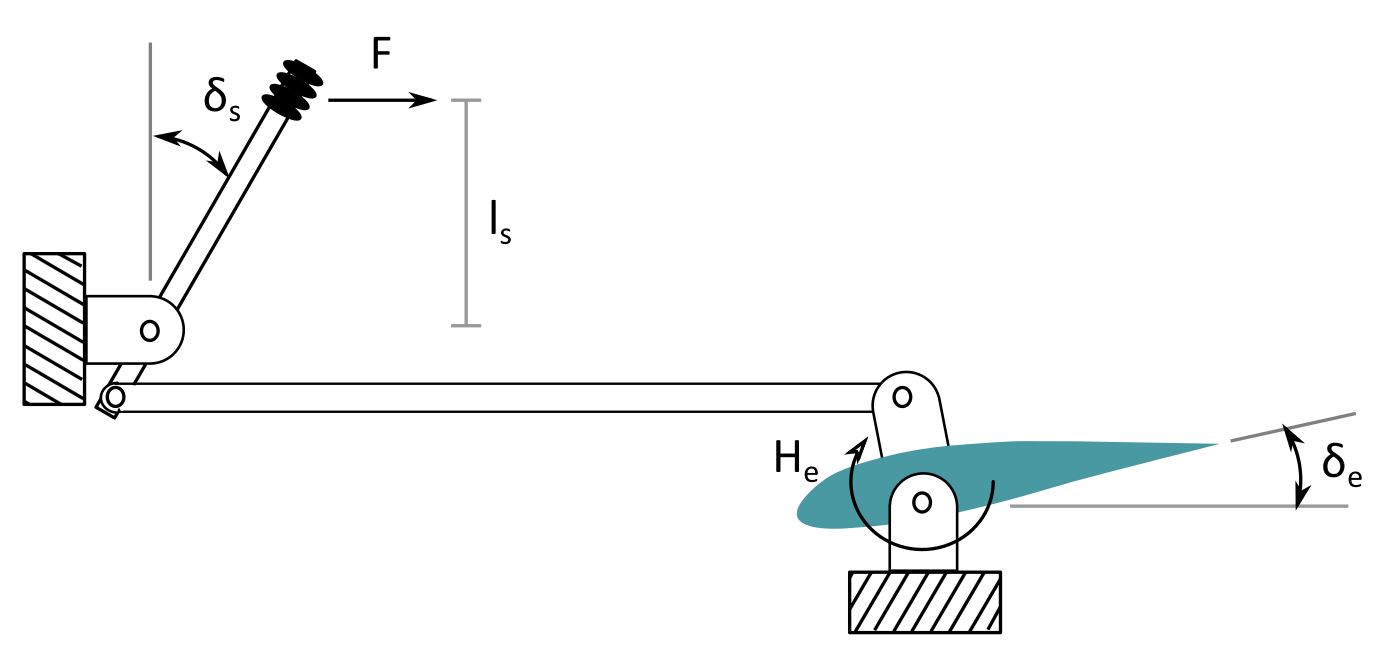
Σχήμα 2.13 Απλοποιημένη μορφή συστήματος ελέγχου του πηδαλίου ανόδου καθόδου.
|
|
|
(2.61) |
όπου
|
|
|
(2.62) |
• G: λόγος μετάδοσης, μέτρο του μηχανικού πλεονεκτήματος που δίνει το σύστημα στον πιλότο,
• δείκτης s: μεγέθη που αναφέρονται στο χειριστήριο (stick).
Αντικαθιστώντας την έκφραση της ροπής στην άρθρωση (Σχήμα 2.12):
|
|
|
(2.63) |
Από αυτή τη σχέση παρατηρείται ότι το πλάτος της δύναμης αυξάνεται σε αναλογία με:
· το μέγεθος του αεροσκάφους (επιφάνεια Se),
· τo τετράγωνο της ταχύτητας πτήσης.
Ασφαλώς παρόμοιες εκφράσεις μπορούν να εξαχθούν και για τις άλλες επιφάνειες ελέγχου.
Τέλος να τονισθεί ότι το σύστημα ελέγχου πρέπει να είναι σχεδιασμένο με τέτοιο τρόπο, ώστε η απαιτούμενη από τον πιλότο δύναμη χειρισμού να είναι σε επιτρεπτά πλαίσια. Αρκετά μικρή ώστε να μην προκαλεί κόπωση στον πιλότο αλλά παράλληλα, αρκετά μεγάλη ώστε να μην μετακινείται το πηδάλιο με την παραμικρή κίνηση στο χειριστήριο και να έχει ο πιλότος μια αίσθηση της στιβαρότητας του ελιγμού που επιχειρεί. Επίσης, συγκεκριμένα για το πηδάλιο ανόδου – καθόδου, η σύμβαση είναι η εξής:
• Έλξη του χειριστηρίου (προς τα πίσω) αντιστοιχεί σε περιστροφή προς τα πάνω του ρύγχους του αεροσκάφους που επιβραδύνεται.
• Ώθηση του χειριστηρίου (προς τα μπρος) αντιστοιχεί σε περιστροφή προς τα κάτω του ρύγχους του αεροσκάφους που επιταχύνεται.
3.7. Αντισταθμιστικά πηδάλια ροπής πρόνευσης
Παράλληλα με τις απαιτήσεις που αφορούν τα όρια των δυνάμεων που χρειάζεται να ασκεί ο πιλότος για τη λειτουργία των επιφανειών ελέγχου, είναι εξίσου σημαντικό να εξουδετερώνεται η δύναμη στα χειριστήρια κατά την αντισταθμισμένη πτήση με κάποιο κατάλληλο τρόπο. Σε αντίθετη περίπτωση ο πιλότος θα έπρεπε να προσπαθεί συνεχώς να διατηρήσει την απαιτούμενη δύναμη για την εκτέλεση αντισταθμισμένης πτήσης.
Αυτή η ανάγκη μπορεί να ικανοποιηθεί με τη χρήση των αντισταθμιστικών πηδαλίων στα πηδάλια ανόδου – καθόδου για τον διαμήκη έλεγχο. Τα αντισταθμιστικά πηδάλια είναι μικρά πτερύγια τοποθετημένα στην ακμή εκφυγής της εκάστοτε επιφάνειας ελέγχου με σκοπού να εξουδετερώνουν τις ροπές στις αρθρώσεις. Όσον αφορά τη συνεισφορά τους στην άνωση της επιφάνειας όπου είναι προσαρτημένα, αυτή είναι ελάχιστη και δεν λαμβάνεται υπόψη στην ανάλυση.
Στο σχήμα (2.14) φαίνεται ο τρόπος προσάρτησης των αντισταθμιστικών πηδαλίων στο οριζόντιο ουραίο σταθερό πτερύγιο.
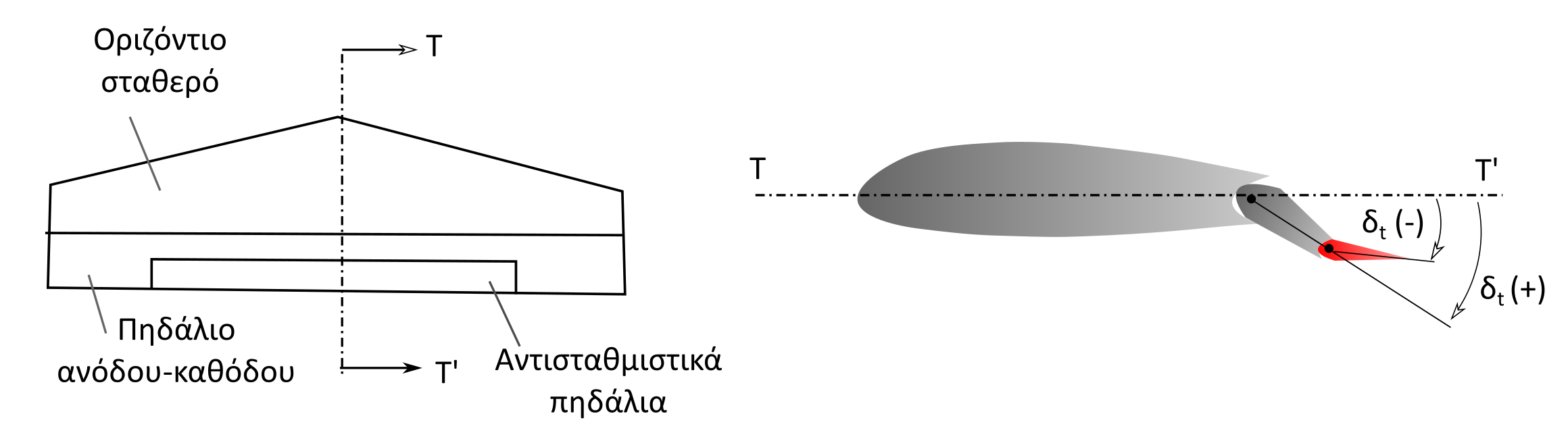
Σχήμα 2.14 Αντισταθμιστικά πηδάλια ροπής πρόνευσης
4. Εγκάρσια στατική ευστάθεια
4.1. Συνθήκη ευστάθειας – Ροπή περιστροφής επαναφοράς
Η εγκάρσια στατική ευστάθεια αφορά την ικανότητα του αεροσκάφους να διατηρεί ισορροπία με τις πτέρυγες οριζόντιες ως προς την περιστροφή. Όπως και στη διαμήκη στατική ευστάθεια, είναι επιθυμητό μετά από μια διαταραχή ως προς την περιστροφή, το αεροσκάφος να δημιουργεί τις κατάλληλες ροπές επαναφοράς στην κατάσταση ισορροπίας. Στο σχήμα 2.15 ορίζεται η έννοια της στατικής ευστάθειας στην περιστροφή. Επίσης, φαίνεται η ακολουθία των γεγονότων μετά από την εφαρμογή μιας διαταραχής πλαγιολίσθησης (sideslip) για ένα εγκάρσια ευσταθές, και ένα εγκάρσια ασταθές αεροσκάφος.
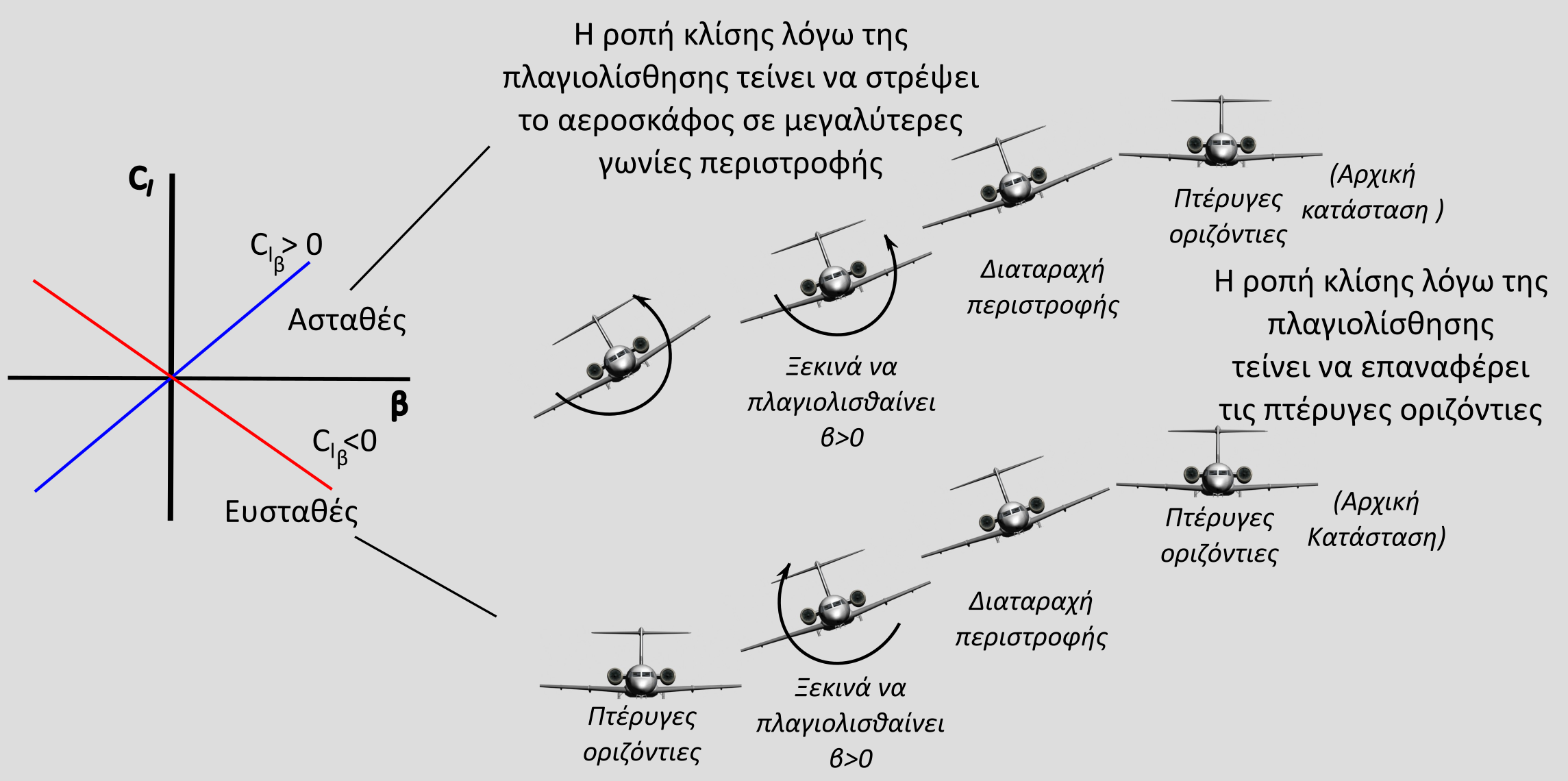
Σχήμα 2.15. Στατική ευστάθεια περιστροφής
Πρέπει να σημειωθεί ότι η τελική κίνηση που θα προκύψει μετά από την εφαρμογή της διαταραχής καθορίζεται και από τα εγκάρσια δυναμικά χαρακτηριστικά του αεροσκάφους.
Η ροπή περιστροφής επαναφοράς, είναι συνάρτηση της γωνίας πλαγιολίσθησης β, όπως φαίνεται στο σχήμα 2.15. Η απαίτηση για στατική ευστάθεια είναι:
|
|
|
(2.64) |
όπου ![]() είναι
η παράγωγος του συντελεστή ροπής περιστροφής ως προς τη γωνία πλαγιολίσθησης.
είναι
η παράγωγος του συντελεστή ροπής περιστροφής ως προς τη γωνία πλαγιολίσθησης.
Η ροπή επαναφοράς που δημιουργείται στο αεροσκάφος όταν ξεκινήσει να πλαγιολισθαίνει, εξαρτάται από τη δίεδρη γωνία, την οπισθόκλιση και τη θέση της πτέρυγας στην άτρακτο όπως και από το κάθετο ουραίο σταθερό πτερύγιο. Σημαντικότερη είναι η επίδραση της δίεδρης γωνίας Γ της πτέρυγας η οποία ορίζεται ως η γωνία που σχηματίζει η κλίση του εκπετάσματος με τον οριζόντιο άξονα όπως φαίνεται και στο σχήμα 2.16. Τότε:
• Για Γ>0, το άκρο της πτέρυγας είναι ψηλότερα από τη βάση της.
• Για Γ<0, το άκρο της πτέρυγας είναι χαμηλότερα από τη βάση της.
Καθώς το αεροσκάφος ξεκινά να πλαγιολισθαίνει, η συνιστώσα του σχετικού ανέμου έχει κατεύθυνση προς το πλάι του αεροσκάφους. Η πτέρυγα από την πλευρά που έρχεται ο άνεμος αντιμετωπίζει αυξημένη γωνία πρόσπτωσης και συνεπώς αυξάνεται η άνωση. Το αντίθετο συμβαίνει στην πτέρυγα στην άλλη πλευρά. Αυτό το φαινόμενο έχει ως αποτέλεσμα τη δημιουργία μιας ροπής η οποία τείνει να επαναφέρει το αεροσκάφος στη θέση με τις πτέρυγες οριζόντιες.
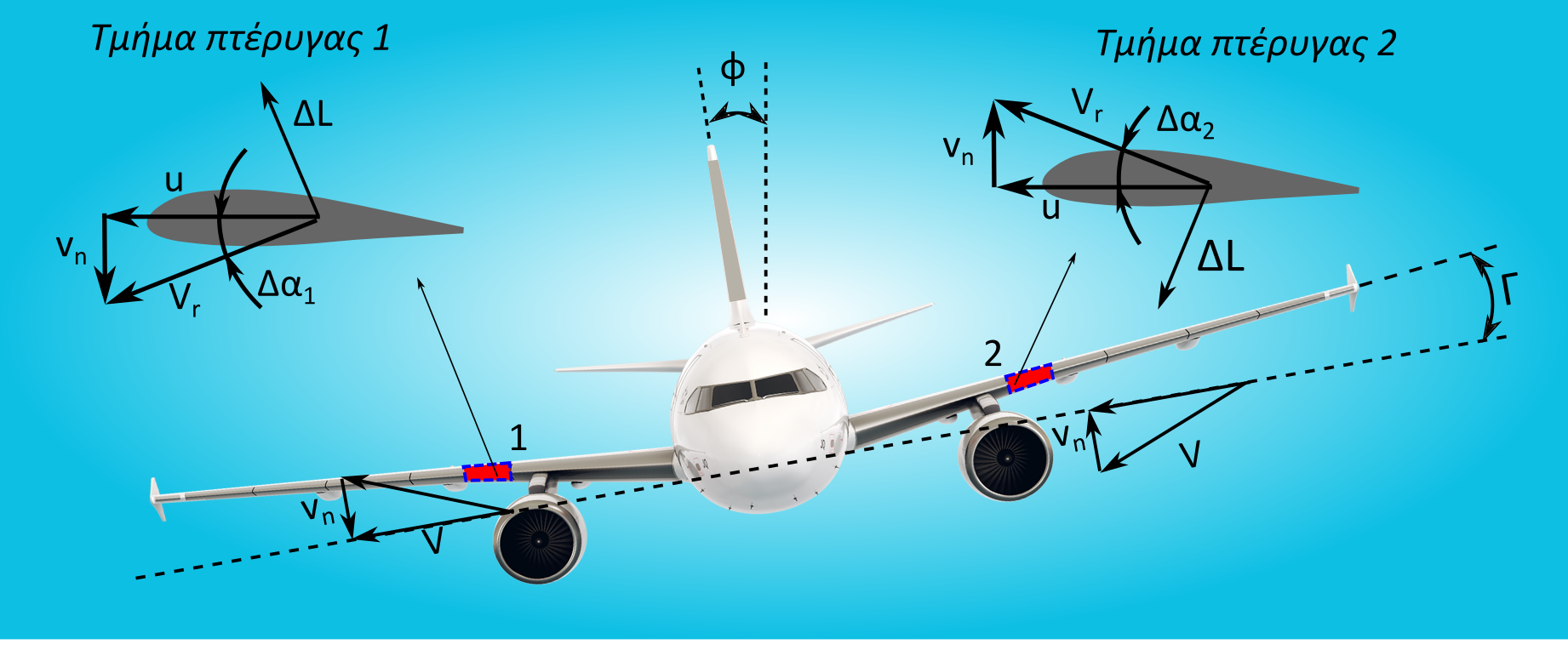
Σχήμα 2.16 Διαταραχή ως προς την περιστροφή
Στο σχήμα 2.16 ορίζονται επίσης τα μεγέθη:
• Δα: τοπική μεταβολή της γωνίας πρόσπτωσης,
• ΔL: τοπική μεταβολή της άνωσης,
• vn : κατακόρυφη συνιστώσα της πλάγιας ταχύτητας,
• Vr : ακτινική συνιστώσα της πλάγιας ταχύτητας.
Θεωρώντας ότι η γωνία Γ είναι μικρή:
|
|
|
(2.65) |
4.2. Έλεγχος περιστροφής
Ο έλεγχος της περιστροφής (κλίσης), επιτυγχάνεται με τη διαφορική εκτροπή των πηδαλίων κλίσης όπως φαίνονται στο σχήμα 2.17. Η βασική αρχή λειτουργίας τους είναι η μεταβολή της κατανομής της ώσης κατά τη διεύθυνση του εκπετάσματος ώστε να δημιουργείται ροπή περιστροφής.
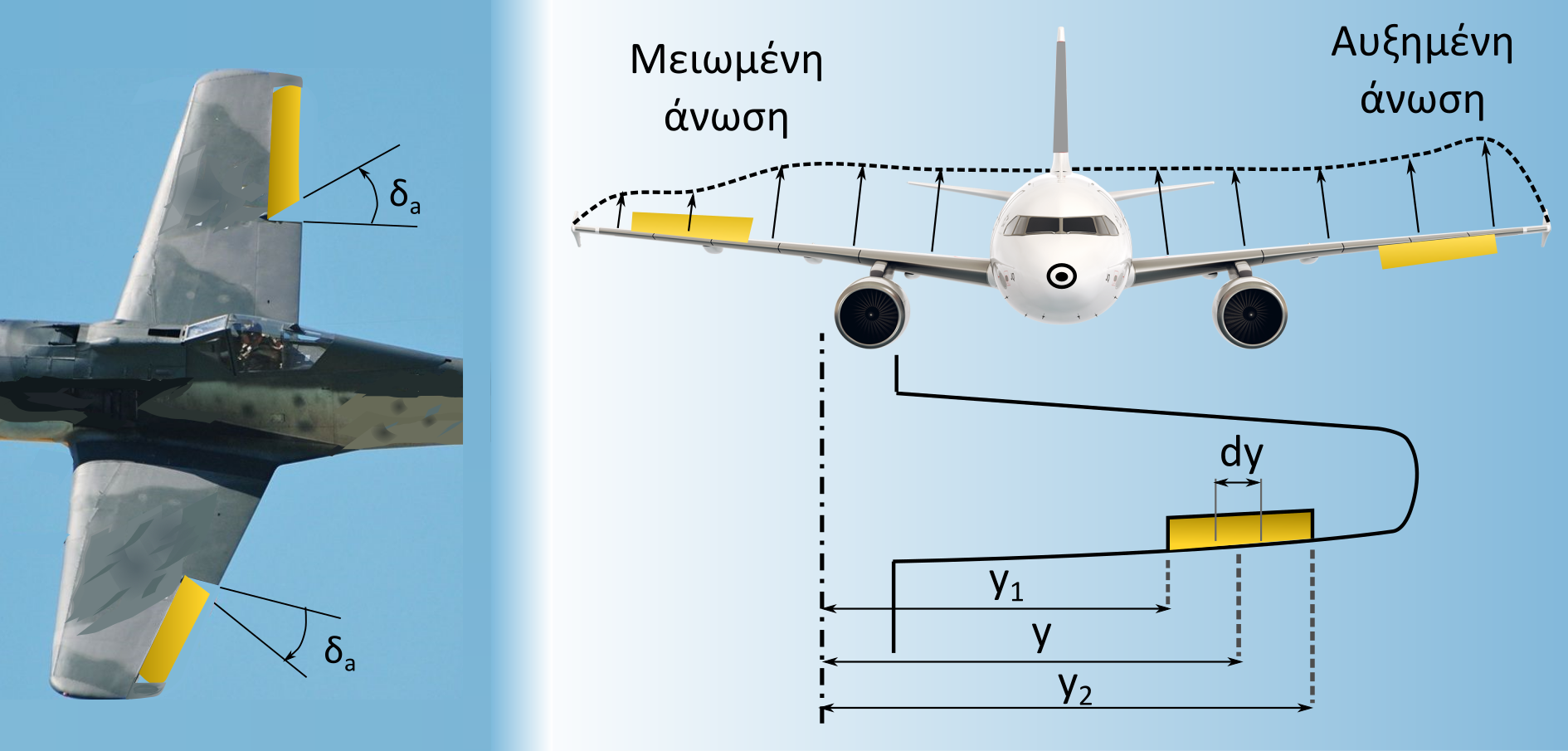
Σχήμα 2.17. Συστήματα ελέγχου περιστροφής
Χρησιμοποιώντας την ίδια λογική με την περίπτωση του πηδαλίου ανόδου – καθόδου, η απειροστή μεταβολή του συντελεστή ροπής περιστροφής εκφράζεται ως:
|
|
|
(2.66) |
Ενώ ο συντελεστής άνωσης μπορεί να γραφτεί:
|
|
|
(2.67) |
Ολοκληρώνοντας στην περιοχή που κατέχει το πηδάλιο περιστροφής και παραγωγίζοντας ως προς τη γωνία του πηδαλίου δa προκύπτει η έκφραση της ισχύος του ελέγχου:
|
|
|
(2.68) |
4.3. Στατική ευστάθεια εκτροπής
Αυτή η μορφή στατικής ευστάθειας αφορά την ικανότητα του αεροσκάφους να εκτρέπεται ή διαφορετικά να στρέφει την κεφαλή του προς τον άνεμο με σκοπό να διατηρήσει την ισορροπία του ως προς τη κατεύθυνση του ανέμου. Επειδή όλα τα αεροσκάφη απαιτείται να πετούν με μηδενική πλαγιολίσθηση ως προς την εκτροπή, η θετική ευστάθεια εκτροπής είναι θεμελιώδης προδιαγραφή για τον σχεδιασμό του αεροσκάφος.
Ο κύριος παράγοντας που καθορίζει τη στατική ευστάθεια εκτροπής είναι το κάθετο ουραίο σταθερό πτερύγιο, αν και -όπως και στη περίπτωση της διαμήκους στατικής ευστάθειας- υπάρχουν και αρκετοί άλλοι παράγοντες που μπορούν να την επηρεάσουν, σύμφωνα με το [3].
Είναι απαραίτητο επίσης, να σημειωθεί ότι ένας μεγάλος βαθμός στατικής ευστάθειας εκτροπής θα έχει ως αποτέλεσμα ένα αεροσκάφος που θα αντιστέκεται στους ελιγμούς κατά την κατεύθυνση αυτή.
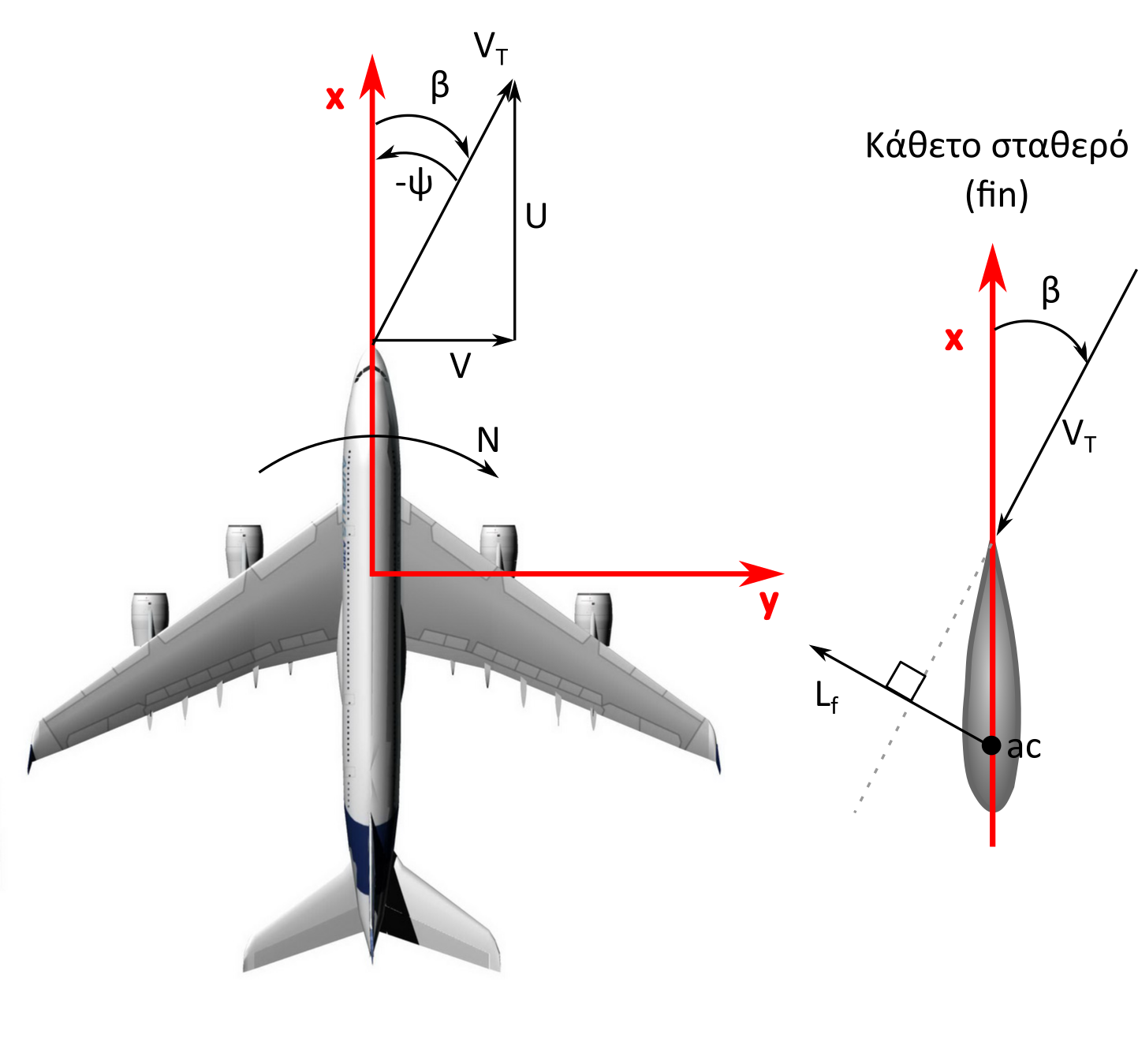
Σχήμα 2.18 Γωνίες και ταχύτητες στην περίπτωση της εκτροπής
Στο σχήμα 2.18 εικονίζεται ένα αεροσκάφος που υφίσταται μια διαταραχή θετικής πλαγιολίσθησης. Ο συνδυασμός της ταχύτητας της πλαγιολίσθησης V και της αξονικής ταχύτητας U καταλήγει σε μια θετική γωνία πλαγιολίσθησης β. Παρατηρείται ότι η θετική γωνία πλαγιολίσθησης ισούται με αρνητική γωνία εκτροπής ψ, εφόσον το ρύγχος του αεροσκάφους εκτρέπεται αριστερά λόγω της ολικής ταχύτητας VΤ. Όπως φαίνεται στο σχήμα 2.18, κατά τη διάρκεια της διαταραχής το κάθετο σταθερό ουραίο πτερύγιο βρίσκεται σε μη μηδενική γωνία πρόσπτωσης η οποία ισούται με τη γωνία πλαγιολίσθησης β (α=β≠0). Το κάθετο σταθερό επομένως προκαλεί άνωση LF η οποία, καθώς έχει τη διεύθυνση και τη φορά που φαίνεται στο σχήμα 2.18, δημιουργεί μια θετική ροπή εκτροπής Ν. Αυτή η ροπή είναι σταθεροποιητική, καθώς αναγκάζει το αεροσκάφος να εκτραπεί δεξιά έως ότου η γωνία πλαγιολίσθησης μηδενιστεί. Επομένως η συνθήκη ώστε ένα αεροσκάφος να διαθέτει ευστάθεια ως προς την εκτροπή είναι :
|
|
|
(2.69) |
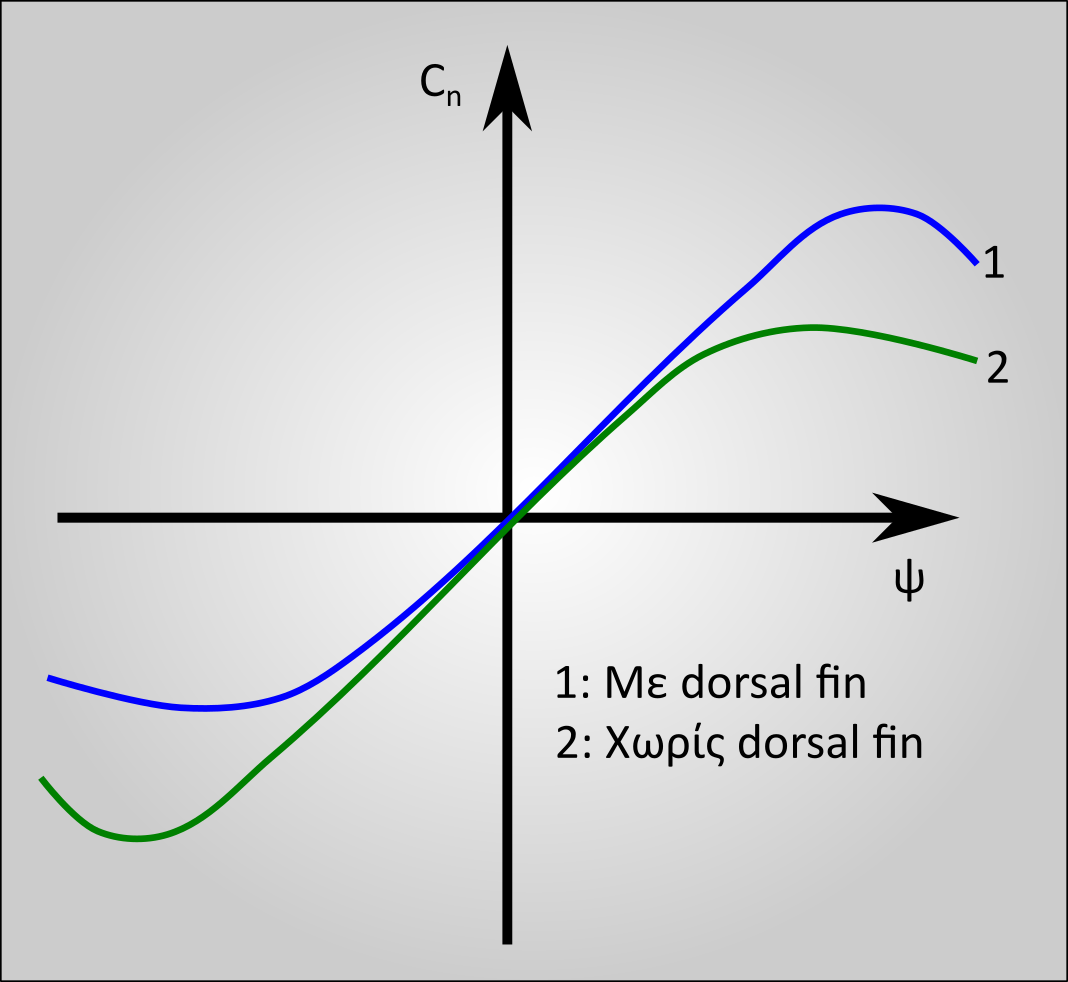
Σχήμα 2.19 Συντελεστής ροπής εκτροπής συναρτήσει της γωνίας εκτροπής.
Ένα τυπικό γράφημα του συντελεστή της ροπής εκτροπής συναρτήσει της γωνίας εκτροπής φαίνεται στο σχήμα 2.19 για ένα ευσταθές αεροσκάφος. Για μικρές διαταραχές ως προς την εκτροπή η καμπύλη είναι ουσιαστικά γραμμική, καθώς διαμορφώνεται κυρίως από την ικανότητα δημιουργίας άνωσης από το κάθετο σταθερό πτερύγιο. Καθώς το κάθετο σταθερό πτερύγιο προσεγγίζει την περιοχή απώλειας στήριξης, η άνωση του αλλοιώνεται ενώ άλλοι παράγοντες αρχίζουν να κυριαρχούν προκαλώντας αστάθεια εκτροπής. Ο κύριος αποσταθεροποιητικός παράγοντας προέρχεται από την άτρακτο, η οποία δεν φαίνεται ότι επηρεάζει τη στατική ευστάθεια για μικρές γωνίες εκτροπής, καθώς καλύπτεται από τις ισχυρές σταθεροποιητικές επιδράσεις του ίδιου του κάθετου σταθερού.
Η προσθήκη μιας επέκτασης (dorsal fin) της επιφάνειας του κάθετου σταθερού πάνω από την άτρακτο σε πολλά μεγάλα κυρίως αεροσκάφη, καθυστερεί σημαντικά την εμφάνιση απώλειας στήριξης στο κάθετο σταθερό επιτρέποντας στη στατική ευστάθεια να διατηρείται σε μεγαλύτερες γωνίες εκτροπής όπως φαίνεται στο σχήμα 2.19 (καμπύλη 1). Η αποτελεσματικότητα του κάθετου σταθερού μειώνεται επίσης, με την αύξηση της γωνίας πρόσπτωσης της ατράκτου, καθώς η βάση του κάθετου σταθερού βυθίζεται όλο και περισσότερο στη διαταραγμένη ροή της ατράκτου και επομένως η δραστική επιφάνεια του μειώνεται.
Το πρόβλημα αυτό καθίσταται όλο και περισσότερο σημαντικό για πολλά σύγχρονα μαχητικά αεροσκάφη. Στην τυπική τους διαμόρφωση αυτά τα αεροσκάφη διαθέτουν δύο κινητήρες τοποθετημένους δίπλα-δίπλα (side-by-side) στο οπίσθιο τμήμα της ατράκτου. Αυτό έχει ως συνέπεια το τμήμα της ατράκτου αμέσως εμπρός από αυτούς να είναι επίπεδο και φαρδύ κάτι που προκαλεί ένα μεγάλο ρεύμα αέρα που ελαττώνει δραστικά την αποτελεσματικότητα του κάθετου σταθερού σε μέτριες προς μεγάλες γωνίας πρόσπτωσης. Για αυτό τον λόγο τα αεροσκάφη αυτής της διαμόρφωσης είτε διαθέτουν δύο κάθετα σταθερά πτερύγια στις εξωτερικές άκρες του άνω τμήματος της ατράκτου όπως το αεροσκάφος F-14, είτε είναι εφοδιασμένα με πολύ μεγάλα κάθετα σταθερά πτερύγια όπως το αεροσκάφος F-111, τα οποία παρουσιάζονται στο σχήμα 2.20.

Σχήμα 2.20 Το μαχητικό αεροσκάφος F-14 του Πολεμικού Ναυτικού των ΗΠΑ (αριστερά) και το μαχητικό αεροσκάφος F-111 της Πολεμικής Αεροπορίας των ΗΠΑ (δεξιά).
Βιβλιογραφία/Αναφορές
|
Michael V. Cook, Flight Dynamics Principles - A Linear Systems Approach to Aircraft Stability and Control, 2nd ed. Oxford, UK: Elsevier Ltd, 2007. |
|
|
Robert C. Nelson, Flight Stability and Automatic Control, 2nd ed. Singapore: WCB/McGraw-Hill, 1998. |
|
|
Bernard Etkin & Lloyd D. Reid, Dynamics of Flight: Stability and Control, 3rd ed. Toronto, Canada: John Wiley & Sons, Inc., 1996. |
3: ΔΥΝΑΜΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ΚΙΝΗΣΗΣ
Σύνοψη
Το κεφάλαιο αυτό, αποτελείται από τρία βασικά μέρη. Την παρουσίαση των συστημάτων αξόνων που χρησιμοποιούνται για την περιγραφή και την ανάλυση της πτήσης του αεροσκάφους, και το υπόβαθρο στο οποίο στηρίζεται η εξαγωγή των εξισώσεων κίνησης, την εξαγωγή των γενικών δυναμικών εξισώσεων κίνησης συμμετρικού στερεού αεροσκάφους και τέλος, τη γραμμικοποίηση και τον διαχωρισμό των εξισώσεων αυτών σε διαμήκη και εγκάρσια δυναμική.
Προαπαιτούμενη γνώση
Απαιτούνται βασικές γνώσεις γεωμετρίας, γραμμικής άλγεβρας, δυναμικής στερεού σώματος και ταλαντώσεων. Επίσης, ο αναγνώστης πρέπει να είναι εξοικειωμένος με τις γενικές έννοιες της μοντελοποίησης και ασφαλώς τα θέματα που αναλύθηκαν στα προηγούμενα κεφάλαια.
1. Συστήματα αξόνων του αεροσκάφους
Εφόσον το αεροσκάφος κινείται μέσα στην ατμόσφαιρα, πρέπει να θεωρηθούν κατάλληλα συστήματα αξόνων για την περιγραφή της σχετικής κίνησης του αεροσκάφους. Η περιγραφή της κίνησης του αεροσκάφους γίνεται ως προς διάφορα εναλλακτικά συστήματα αξόνων, όπως παρουσιάζονται και από τον McLean [7], τα οποία έχουν καθιερωθεί στη δυναμική πτήσης και περιλαμβάνουν:
• αδρανειακούς άξονες (συνήθως γήινους),
• σωματόδετους άξονες,
• αεροδυναμικούς άξονες ή άξονες ανέμου,
• άξονες ευστάθειας.
1.1. Αδρανειακοί (χωρόδετοι) άξονες
Οι αδρανειακοί άξονες, προσδένονται σε ένα σύστημα αναφοράς το οποίο θεωρείται ακίνητο και ως προς το οποίο μελετάμε τη σχετική κίνηση του αεροσκάφους. Συνήθως, σαν τέτοιο σύστημα συντεταγμένων θεωρείται η γη.
Θα πρέπει να σημειωθεί, ότι στην πραγματικότητα η γη δεν είναι ακίνητη, αλλά πραγματοποιεί περιστροφή τόσο γύρω από τον εαυτό της, όσο και γύρω από τον ήλιο. Όμως αυτοί οι χρόνοι περιστροφής είναι πολύ μεγαλύτεροι από τους χρόνους μέσα στους οποίους εξελίσσονται τα φαινόμενα δυναμικής, τα οποία εξετάζονται στο πλαίσιο της Δυναμικής Πτήσης, και οι οποίοι είναι της τάξης του 1sec έως 5min και κατά συνέπεια η παραδοχή της γης σαν αδρανειακό (ακίνητο) σύστημα αναφοράς είναι απολύτως επαρκής, όπως σημειώνει ο Cook [3]. Για εφαρμογές όμως πλοήγησης πολύ μεγαλύτερης χρονικής διάρκειας, χρησιμοποιούνται άλλα αδρανειακά συστήματα συντεταγμένων, όπως παραδοσιακά ο έναστρος ουρανός.
Οι γήινοι άξονες (earth axis) ορίζονται με ένα σημείο αναφοράς Ο0 , το οποίο είναι η αρχή των αξόνων ενός δεξιόστροφου ορθογώνιου συστήματος αναφοράς (Ο0x0y0z0). Η σύμβαση για τις διευθύνσεις τον γήινων αξόνων έχει ως εξής:
• Ο άξονας Ο0x0 έχει κατεύθυνση προς το βορρά (North).
• Ο άξονας O0y0 έχει κατεύθυνση προς την ανατολή (East).
• Ο άξονας Ο0z0 έχει κατεύθυνση κατακόρυφα προς τα κάτω (προς το κέντρο της γης), παράλληλα με το διάνυσμα της βαρύτητας.
Οι γήινοι άξονες απεικονίζονται στο σχήμα 3.1.Το επίπεδο (Ο0x0y0) ορίζει το τοπικό οριζόντιο επίπεδο το οποίο είναι εφαπτόμενο στην επιφάνεια της γης. Επομένως το ίχνος πτήσης (πορεία) ενός αεροσκάφους μπορεί να περιγραφεί πλήρως από τις συντεταγμένες του στο γήινο σύστημα αξόνων. Αυτή η πρόταση προϋποθέτει μια επίπεδη γη (flat earth) όπου η κατακόρυφη διεύθυνση είναι προσδεμένη στο άνυσμα της βαρύτητας. Αυτό το σύστημα είναι επαρκές για πτήσεις τοπικού χαρακτήρα, ταιριάζει όμως καλύτερα σε εφαρμογές πλοήγησης και εφαρμογές μελέτης επιδόσεων, εκεί όπου η μελέτη του ίχνους πτήσης έχει πρωταρχικό ενδιαφέρον.
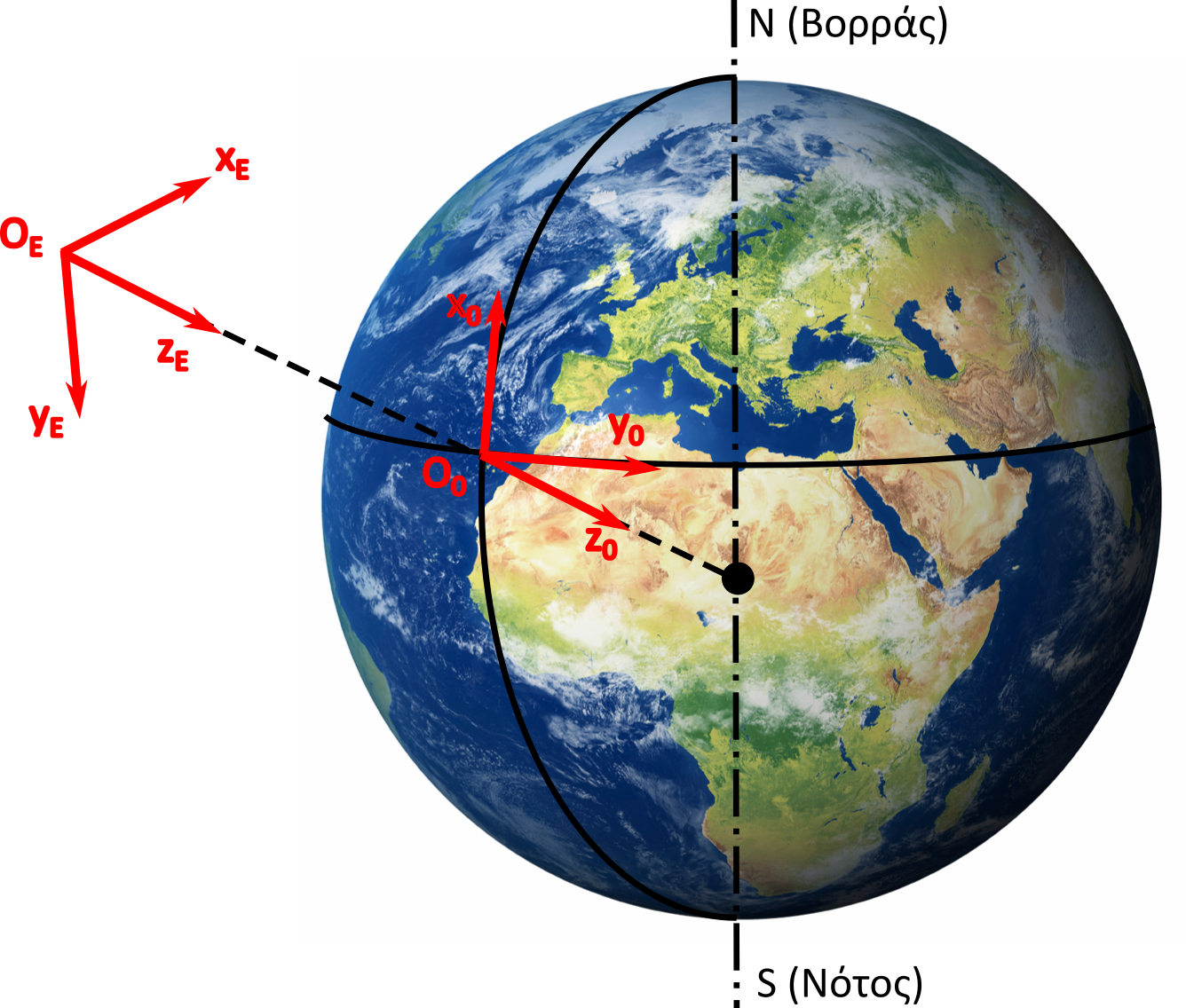
Σχήμα 3.1 Γήινοι άξονες συντεταγμένων.
Για τις εφαρμογές της Δυναμικής Πτήσης προτιμάται ένας πιο απλοποιημένος ορισμός των γήινων αξόνων. Επειδή η Δυναμική Πτήσης ουσιαστικά αφορά τη βραχυπρόθεσμη κίνηση, μπορεί να γίνει η παραδοχή ότι η πτήση πραγματοποιείται πάνω από μια επίπεδη γη. Η πιο κοινή μορφή πτήσης είναι εκείνη της ευθείας και οριζόντιας πτήσης. Πρόκειται για την πτήση κατά το οριζόντιο επίπεδο σε σταθερό ύψος, ενώ ανεξάρτητα από τη μετέπειτα πτήση του αεροσκάφους, η θέση του ορίζεται σε σχέση με τον ορίζοντα.
Στο σχήμα 3.1 ορίζεται ένα δεύτερο σύστημα αξόνων (ΟΕxEyEzE). Οι άξονες (ΟΕxEyEzE) ονομάζονται γήινοι άξονες αναφοράς (datum-path earth axis) και ορίζονται για την περιγραφή της βραχυπρόθεσμης σχετικής κίνησης του αεροσκάφους, ως προς το αδρανειακό σύστημα (Ο0x0y0z0):
• ΟΕxEyE : το οριζόντιο επίπεδο, παράλληλο στο επίπεδο (Ο0x0y0) στην επιφάνεια της γης,
• ΟΕxE : άξονας με φορά προς τη διεύθυνση πτήσης του αεροσκάφους και όχι προς το βορρά,
• ΟΕzE: άξονας με φορά προς τα κάτω όπως και προηγουμένως.
Η τοποθέτηση της αρχής των αξόνων ΟΕ μπορεί να γίνει σε οποιοδήποτε κατάλληλο σημείο μέσα στην ατμόσφαιρα. Συνήθως όμως, για τις απαιτήσεις της ανάλυσης που επιχειρείται στη δυναμική πτήσης, η αρχή των αξόνων ΟΕ τοποθετείται στο κέντρο βάρους του αεροσκάφους (cg – center of gravity), ώστε να ταυτίζεται με την αρχή Ο του σωματόδετου συστήματος του αεροσκάφους (body axis) (Οxbybzb). Το σωματόδετο σύστημα παρουσιάζεται αναλυτικά στο επόμενο υποκεφάλαιο.
1.2. Σωματόδετοι άξονες του αεροσκάφους
Το σωματόδετο σύστημα αξόνων (Οxbybzb) που προαναφέρθηκε, είναι ένα δεξιόστροφο ορθογώνιο σύστημα αξόνων, το οποίο είναι προσδεμένο στο αεροσκάφος (σχ. 3.2) και κινείται μαζί με αυτό. Έτσι, όταν η κατάσταση του αεροσκάφους διαταράσσεται από τις αρχικές συνθήκες πτήσης, οι άξονές του κινούνται μαζί με το αεροσκάφος. Ο πιο συνηθισμένος τρόπος ορισμού του συστήματος (Οxbybzb) έχει σαν βάση τη γεωμετρία της ατράκτου και ορίζεται αναλυτικά ως ακολούθως:
• Οxbzb : το επίπεδο που ορίζει το επίπεδο συμμετρίας του αεροσκάφους,
• Οxb : άξονας που γενικά ορίζεται παράλληλος με τη γεωμετρική αναφορά της ατράκτου (horizontal fuselage datum),
• Οyb : άξονας με φορά προς τη δεξιά πτέρυγα,
• Οzb : άξονας με φορά προς τα κάτω.
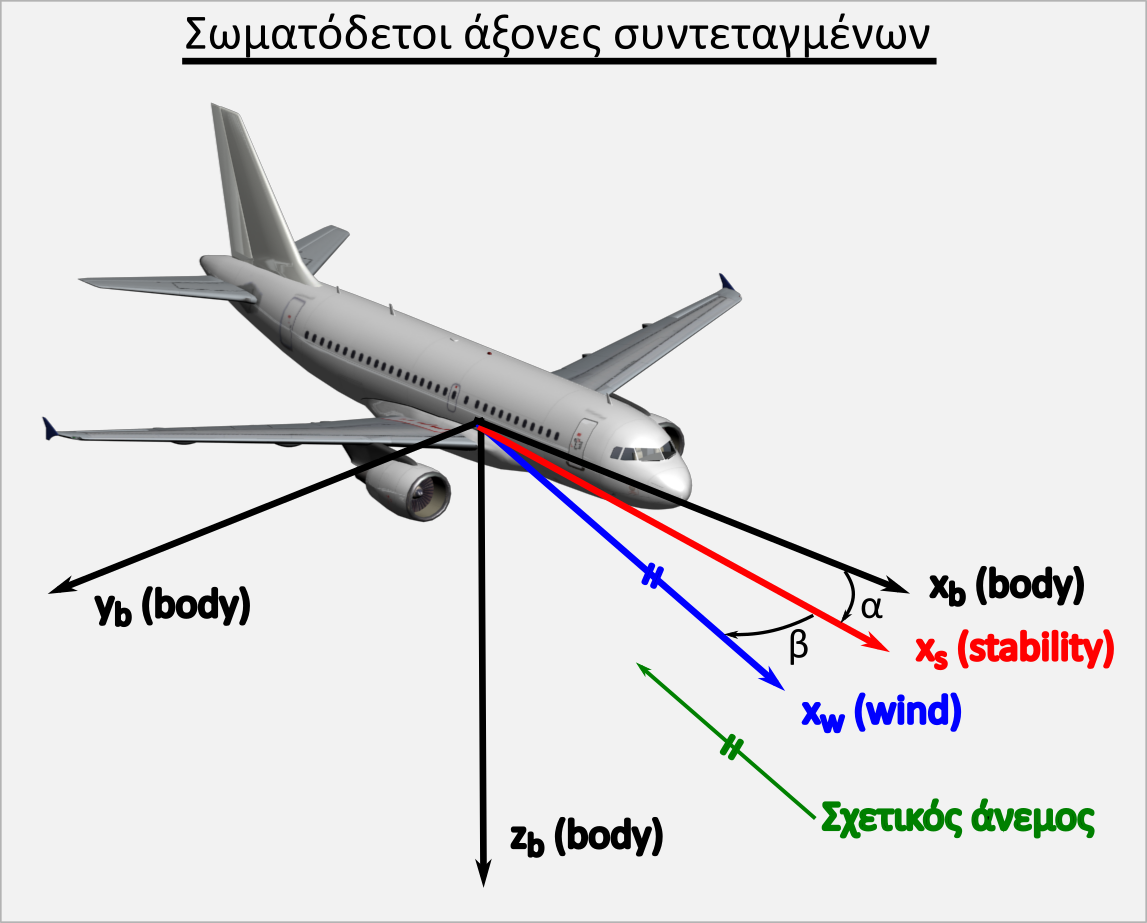
Σχήμα 3.2 Σωματόδετοι άξονες συντεταγμένων.
Η αρχή Ο των αξόνων βρίσκεται σ’ ένα σημείο της ατράκτου το οποίο μας εξυπηρετεί και συνήθως -αλλά όχι απαραίτητα- ταυτίζεται με το κέντρο βάρους (cg - center of gravity).
Επίσης, είναι πολύ βολικός ο ορισμός ενός ακόμη συστήματος αξόνων (Oxwywzw) που ονομάζονται αεροδυναμικοί άξονες ή άξονες ανέμου (wind axis) και ορίζονται στη γενική περίπτωση όπως φαίνεται στο σχήμα 3.2. Ο άξονας Oxw είναι παράλληλος με τη διεύθυνση της ολικής ταχύτητας VT του σχετικού ανέμου και προσδιορίζεται σε σχέση με τον άξονα Oxb μέσω των δύο χαρακτηριστικών γωνιών της σχετικής ταχύτητας του ανέμου ως προς το αεροσκάφος:
• γωνία πρόσπτωσης α,
• γωνία πλαγιολίσθησης β.
Σε σταθερή-μόνιμη συμμετρική πτήση (β=0) οι άξονες του ανέμου (Οxwywzw) δεν είναι τίποτα άλλο παρά ένας τύπος του σωματόδετου συστήματος αξόνων, το οποίο έχει περιστραφεί γύρω από τον άξονα Οyb κατά τη σταθερή γωνία πρόσπτωσης του σώματος αe έως ότου ο άξονας Οxw ευθυγραμμιστεί με το διάνυσμα της ολικής ταχύτητας πτήσης. Επιπλέον, επειδή υπάρχει μία και μοναδική τιμή της γωνίας πρόσπτωσης αe που αντιστοιχεί σε κάθε συνθήκη πτήσης, ο προσανατολισμός των αξόνων του ανέμου (ή ευστάθειας αντίστοιχα) στην άτρακτο είναι διαφορετικός για κάθε συνθήκη πτήσης. Όμως, για κάθε μια δεδομένη συνθήκη πτήσης, ο προσανατολισμός των αξόνων του ανέμου είναι εξ αρχής καθορισμένος και σταθερός σε σχέση με το αεροσκάφος, ενώ κινείται με αυτό σε κάθε διαταραχή. Οι τυπικές τιμές για τη γωνία πρόσπτωσης του αεροσκάφους είναι αe=-10°:20° στο εύρος του κανονικού φακέλου πτήσης.
Συνοψίζοντας, δεν είναι ιδιαίτερα σημαντικό ποιο σύστημα αξόνων θα επιλεγεί, με την προϋπόθεση ότι η επιλογή μοντελοποιεί την κατάσταση πτήσης που εξετάζεται. Όταν χρησιμοποιούνται δεδομένα για τις εξισώσεις κίνησης, είναι πολύ συνηθισμένο κάποια από αυτά να αναφέρονται στους άξονες του ανέμου ενώ κάποια άλλα να αναφέρονται στο σωματόδετο σύστημα. Επιβάλλεται επομένως να υπάρχει η δυνατότητα εκτέλεσης των απαραίτητων μετασχηματισμών από το ένα στο άλλο σύστημα.
Παράλληλα με τα παραπάνω δύο συστήματα συντεταγμένων, χρησιμοποιούνται και οι άξονες ευστάθειας, (stability axis, Oxsyszs). Η διαφορά των αξόνων ευστάθειας με τους άξονες ανέμου είναι ότι o άξονας Oxs έχει διεύθυνση παράλληλη με την προβολή της σχετικής ταχύτητας του ανέμου στο επίπεδο (Oxz). Έτσι, ορίζεται και η γωνία πλαγιολίσθησης β όπως φαίνεται στο σχήμα 3.2.
Είναι προφανές βέβαια ότι οι άξονες ευστάθειας και οι άξονες άνεμου ταυτίζονται σε κάποιες συνθήκες πτήσης, όταν η γωνία πλαγιολίσθησης είναι μηδενική, όταν δηλαδή ο σχετικός άνεμος χτυπά μετωπικά το αεροσκάφος, το οποίο είναι και η συνηθέστερη κατάσταση.
2. Μεταβλητές του αεροσκάφους και βασικές παραδοχές
2.1 Μεταβλητές του αεροσκάφους στο σωματόδετο σύστημα συντεταγμένων
Όπως περιγράφει ο Blakelock [8], το αεροσκάφος αποτελεί ένα στερεό σώμα το οποίο κινείται μέσα στην ατμόσφαιρα και έχει έξι (6) βαθμούς ελευθερίας: τις τρεις συνιστώσες της μετατόπισης ως προς τους εκάστοτε τρεις άξονες αναφοράς και τις αντίστοιχες γωνίες περιστροφής περί τους άξονες αυτούς. Η περιγραφή της πτήσης γίνεται ως προς τις δυνάμεις, τις ροπές, τις γραμμικές και τις γωνιακές ταχύτητες, καθώς και τη θέση του. Τα μεγέθη αυτά προβάλλονται και αναλύονται πάνω σε κατάλληλα προσδεμένο σύστημα αναφοράς του αεροσκάφους (Σχήμα 3.3). Για διευκόλυνση στους υπολογισμούς, θεωρείται αρχικά ένα γενικευμένο σωματόδετο σύστημα αξόνων Οxyz, το οποίο μπορεί να είναι το σωματόδετο σύστημα (Οxbybzb) ή και το σύστημα ανέμου (Οxwywzw), έτσι όπως ορίστηκαν.

Σχήμα 3.3 Μεταβλητές του αεροσκάφους σε σωματόδετο σύστημα συντεταγμένων
Οι συνιστώσες της συνολικής γραμμικής ταχύτητας VT = [U,V,W]T του κέντρου βάρους O είναι:
• U: αξονική ταχύτητα,
• V: εγκάρσια ταχύτητα,
• W: κάθετη ταχύτητα.
Οι συνιστώσες της γωνιακής ταχύτητας Ω = [P,Q,R]T του κέντρου βάρους O είναι:
• P: ρυθμός περιστροφής,
• Q: ρυθμός πρόνευσης,
• R: ρυθμός εκτροπής.
Οι συνιστώσες του αθροίσματος των εξωτερικών δυνάμεων (αεροδυναμικών δυνάμεων, δυνάμεων βαρύτητας, πρόωσης, κτλ.) είναι:
• X: αξονική συνιστώσα δύναμης,
• Y: πλάγια συνιστώσα δύναμης,
• Z: κάθετη συνιστώσα δύναμης.
Οι συνιστώσες του αθροίσματος των εξωτερικών ροπών δυνάμεων (αεροδυναμικών ροπών, πρόωσης, κτλ.) είναι:
• L: ροπή περιστροφής,
• M: ροπή πρόνευσης,
• N: ροπή εκτροπής.
Η θετική φορά των μεταβλητών καθορίζεται από την εκλογή του δεξιόστροφου συστήματος αξόνων. Οι συνιστώσες των γραμμικών ποσοτήτων, (δύναμη, ταχύτητα κλπ.) είναι θετικές όταν η φορά της δράσης είναι η ίδια με τη φορά του άξονα με τον οποίο αυτή σχετίζεται. Η θετική έννοια των περιστροφικών ποσοτήτων, (ροπή, γωνιακή ταχύτητα, γωνία θέσης, κλπ. ) αντιστοιχούν σε δεξιόστροφή περιστροφή και μπορεί να καθοριστεί ως ακολούθως:
• Θετική περιστροφή γύρω από τον άξονα Ox: ο άξονας Oy πλησιάζει τον άξονα Oz, το αεροσκάφος εμφανίζει δεξιά κλίση και η δεξιά πτέρυγα κλίνει προς τα κάτω.
• Θετική πρόνευση ως προς τον άξονα Oy: ο άξονας Oz πλησιάζει τον άξονα Ox και το αεροσκάφος ανεβάζει το ρύγχος (nose up).
• Θετική εκτροπή ως προς τον άξονα Oz: ο άξονας Ox πλησιάζει τον άξονα Oy και το αεροσκάφος στρέφει το ρύγχος προς τα δεξιά.
2.2 Η θέση του αεροσκάφους ως προς το γήινο σύστημα αξόνων
Στη συνέχεια θα ορισθεί ο προσανατολισμός του αεροσκάφους σε σχέση με το γήινο (χωρόδετο) σύστημα αξόνων. Για τον σκοπό αυτό αρκεί να ορισθούν κατάλληλες γωνίες που θα συσχετίσουν το προσδεμένο στο αεροσκάφος σύστημα (Οxyz), με το γήινο σύστημα (ΟΕxEyEzE). Γενικά η διαδικασία συσχετισμού ενός μεγέθους ή μεταβλητής εκφρασμένης σε ένα σωματόδετο σύστημα αξόνων με το αντίστοιχο μέγεθος ή μεταβλητή εκφρασμένη ένα σταθερό (αδρανειακό, χωρόδετο) σύστημα αξόνων γίνεται με ένα πολύ συγκεκριμένο τρόπο, χρησιμοποιώντας ένα σύνολο τριών γωνιών (Φ,Θ,Ψ), οι οποίες ονομάζονται γωνίες Euler και οι οποίες φαίνονται στο σχήμα 3.4, μαζί με τις θετικές φορές τους.
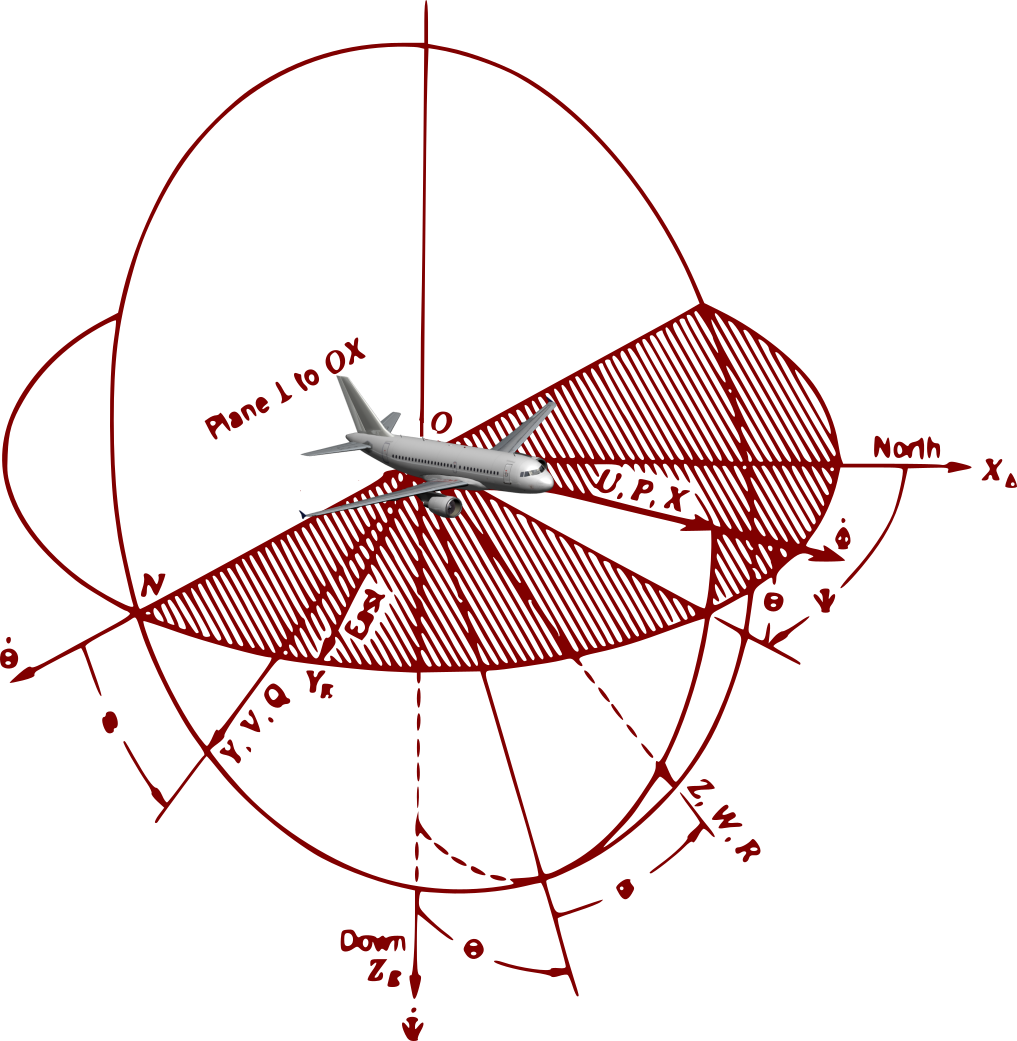
Σχήμα 3.4 Γωνίες Euler και μετάβαση από το χωρόδετο στο σωματόδετο σύστημα συντεταγμένων
Η συσχέτιση των δύο συστημάτων συντεταγμένων πραγματοποιείται μέσω τριών διαδοχικών περιστροφών κατά σειρά γύρω από τις γωνίες Euler Ψ, Θ, Φ αντίστοιχα, ξεκινώντας από το σύστημα (ΟxEyEzE):
• Γωνία πορείας ή εκτροπής ή διεύθυνσης Ψ (heading angle ή yaw attitude): περιστροφή του (ΟxEyEzE) κατά γωνία Ψ γύρω από τον άξονα ΟzE, οδηγεί σε ένα νέο σύστημα συντεταγμένων (Οx1y1z1), με άξονες Οx1=ΟxΗ , Οy1=ΟyΗ, Οz1=ΟzE.
• Γωνία πρόνευσης Θ (pitch angle ή pitch attitude): περιστροφή του (ΟxΗyΗzΕ) κατά γωνία Θ γύρω από τον άξονα Οy1=ΟyH, οδηγεί σε ένα νέο σύστημα συντεταγμένων (Οx2y2z2) με άξονες Οx2=Οx , Οy2=ΟyΗ, Οz2=ΟzΝ.
• Γωνία περιστροφής ή κλίσης Φ (bank angle ή roll attitude): περιστροφή του (ΟxyΗzΝ) κατά γωνία Φ γύρω από τον άξονα Οx2=Οx, οδηγεί τελικά στο σωματόδετο σύστημα συντεταγμένων (Οxyz).
Στο σχήμα 3.4 φαίνονται
επίσης, οι αντίστοιχες γωνιακές ταχύτητες (![]() ,
,![]() ,
,![]() ),
οι οποίες ορίζονται ως:
),
οι οποίες ορίζονται ως:
•
ρυθμός αλλαγής της κλίσης ![]() ,
,
•
ρυθμός αλλαγής της γωνίας ανόδου-καθόδου ![]() ,
,
•
ρυθμός αλλαγής της πορείας ![]() .
.
Οι συντεταγμένες ενός διανύσματος σε ένα από τα διάφορα συστήματα συντεταγμένων (ΟxEyEzE), (Οx1y1z1), (Οx2y2z2), (Οxyz) του σχ. 3.4 μπορούν να μετατραπούν σε οποιοδήποτε άλλο σύστημα συντεταγμένων μέσω μητρώων (μητρώα περιστροφής), των οποίων τα στοιχεία είναι τριγωνομετρικοί αριθμοί των γωνιών Euler. Η σχετική διαδικασία αναλύεται στο παράρτημα A.1.
Σαν αποτέλεσμα, οι γωνιακές ταχύτητες P,Q,R στο σωματόδετο
σύστημα αναφοράς, σχετίζονται με τις γωνιακές ταχύτητες των γωνιών Euler ![]() ,
,![]() ,
,![]() ,
με τις ακόλουθες σχέσεις:
,
με τις ακόλουθες σχέσεις:
|
|
|
(3.1) |
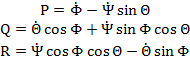
Σε μητρωϊκή μορφή:
|
|
|
(3.2) |
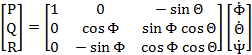
Πρέπει να σημειωθεί ότι ο ορισμός των αξόνων γύρω από τους
οποίους γίνεται η περιστροφή, η φορά της περιστροφής αλλά και η σειρά με την
οποία γίνεται η περιστροφή έχει ιδιαίτερη σημασία επειδή μπορούν να οδηγήσουν
σε διαφορετικό αποτέλεσμα. Σε γωνία θ = 90![]() η
γωνία φ χάνει το νόημα της. Για να ξεπεραστεί αυτό το πρόβλημα σε εφαρμογές προσομοίωσης,
όπου το αεροσκάφος πρέπει να είναι ικανό να εκτελέσει ένα πλήρη ελιγμό
ανακύκλωσης, έχουν αναπτυχθεί μαθηματικές μέθοδοι που δίνουν αποδεκτές λύσεις.
η
γωνία φ χάνει το νόημα της. Για να ξεπεραστεί αυτό το πρόβλημα σε εφαρμογές προσομοίωσης,
όπου το αεροσκάφος πρέπει να είναι ικανό να εκτελέσει ένα πλήρη ελιγμό
ανακύκλωσης, έχουν αναπτυχθεί μαθηματικές μέθοδοι που δίνουν αποδεκτές λύσεις.
Σε αυτό το σημείο πρέπει να σημειωθεί ότι ο ρυθμός περιστροφής P (roll rate) ως προς το σωματόδετο σύστημα
δεν ταυτίζεται με τον ρυθμό αλλαγής της κλίσης ![]() .
Ο ρυθμός πρόνευσης Q (pitch rate)
ως προς το σωματόδετο σύστημα δεν ταυτίζεται με τον ρυθμό αλλαγής της γωνίας ανόδου-καθόδου
.
Ο ρυθμός πρόνευσης Q (pitch rate)
ως προς το σωματόδετο σύστημα δεν ταυτίζεται με τον ρυθμό αλλαγής της γωνίας ανόδου-καθόδου
![]() .
Ο ρυθμός εκτροπής R (yaw rate) ως
προς το προσδεμένο σύστημα δεν ταυτίζεται με τον ρυθμό αλλαγής της πορείας
.
Ο ρυθμός εκτροπής R (yaw rate) ως
προς το προσδεμένο σύστημα δεν ταυτίζεται με τον ρυθμό αλλαγής της πορείας ![]() .
.
2.3 Οι Βασικές παραδοχές και Υποθέσεις
Σε όλη τη διαδικασία της ανάλυσης που επιχειρείται στο παρόν σύγγραμμα και στα πλαίσια της τυπικής ανάλυσης της δυναμικής πτήσης που πραγματοποιείται, χρησιμοποιείται ένα βασικό σύνολο παραδοχών, όπως καταγράφονται στο [6], οι οποίες απλοποιούν πάρα πολύ τη διαδικασία ανάλυσης.
Οι παραδοχές αυτές, προκύπτουν από το γεγονός ότι κάποια δεδομένα και καταστάσεις κατά την πτήση είναι αρκετά πολύπλοκα, ενώ παράλληλα η επίδραση τους στα αποτελέσματα της ανάλυσης, μπορεί να θεωρηθεί αμελητέα χωρίς να βλάπτει τη γενικότητα των συμπερασμάτων που προκύπτουν από αυτή.
Οι βασικές αυτές παραδοχές και υποθέσεις είναι οι εξής:
• Το αεροσκάφος πετά σε ακίνητη ατμόσφαιρα με σταθερές ιδιότητες.
• Η ταχύτητα του αεροσκάφους είναι σημαντικά μικρότερη της ταχύτητας του ήχου, έτσι ώστε ο αέρας να θεωρείται ασυμπίεστος και οι διαταραχές να διαδίδονται ακαριαία επάνω στο αεροσκάφος.
• Το αεροσκάφος δεν παραμορφώνεται ελαστικά υπό την επίδραση των φορτίων που του ασκούνται. Συμπεριφέρεται δηλαδή σαν άκαμπτο σώμα.
• Το αεροσκάφος έχει σταθερή μάζα.
• Το αεροσκάφος είναι συμμετρικό ως προς το επίπεδο Οxz.
• Η επιτάχυνση της βαρύτητας είναι σταθερή.
• Οι επιταχύνσεις του αεροσκάφους λόγω της κίνησης του περί την καμπύλη επιφάνεια της γης που περιστρέφεται, είναι αμελητέες.
Αυτές οι παραδοχές ακολουθούνται σε όλη την έκταση της ανάλυσης του συγγράμματος, εκτός αν αναφέρεται κάτι διαφορετικό σε ειδικές μεμονωμένες περιπτώσεις.
Στην πραγματικότητα το αεροσκάφος είναι ένα ελαστικό σώμα το οποίο παραμορφώνεται υπό την επίδραση φορτίων. Η μάζα του ελαττώνεται εφόσον καίει καύσιμο κατά την πτήση. Το σχήμα 3.5 δείχνει την περίπτωση ενός αεροσκάφους (Blohm & Voss BV 141 B-0), όπου δεν ισχύει η υπόθεση της συμμετρικότητας. Επίσης, τα ατμοσφαιρικά χαρακτηριστικά μεταβάλλονται ανάλογα με το υψόμετρο και τον χρόνο, ενώ τα διάφορα αέρια δεν βρίσκονται ποτέ σε απόλυτη ηρεμία.
Σχήμα 3.5 Μη συμμετρικό αεροσκάφος Βlohm & Voss BV 141 B-0
Είναι όμως δυνατή η δημιουργία εύχρηστων και αποτελεσματικών μοντέλων δυναμικής της πτήσης, με ευρύτητα και γενικότητα για τις συνήθεις και τυπικές περιπτώσεις αεροσκαφών, συνθηκών πτήσης και χρονικής διάρκειας των υπό εξέταση δυναμικών φαινομένων με βάση τις παραπάνω παραδοχές.
3. Οι γενικές εξισώσεις κίνησης του στερεού συμμετρικού αεροσκάφους
Οι εξισώσεις κίνησης προκύπτουν από την εφαρμογή του δεύτερου νόμου του Νεύτωνα για ένα στερεό σώμα, ακολουθώντας τη σημειολογία του [8]. H μορφή του νόμου αυτού στην περίπτωση των μετακινήσεων του σώματος λόγω της δράσης ενός πεδίου εξωτερικών δυνάμεων Fex είναι:
|
|
|
(3.3) |
όπου m είναι η μάζα του σώματος και v το διάνυσμα της ταχύτητας του κέντρου βάρους του. Η σχέση (3.3) υποδηλώνει ουσιαστικά ότι οι εξωτερικές δυνάμεις εξισορροπούνται από τη μεταβολή της ορμής του σώματος.
Ανάλογα, οι ασκούμενες εξωτερικές ροπές Tex στο σώμα εξισορροπούνται από τη μεταβολή της στροφορμής του:
|
|
|
(3.4) |
Στις παραπάνω εξισώσεις, ο ρυθμός μεταβολής ενός διανύσματος b λαμβάνεται στο αδρανειακό (χωρόδετο) σύστημα αναφοράς και περιλαμβάνει δύο επί μέρους συμβολές:
|
|
|
(3.5) |
Η πρώτη συμβολή περιλαμβάνει το ρυθμό μεταβολής του b στο σωματόδετο σύστημα αξόνων και η δεύτερη περιλαμβάνει τη μεταβολή του b λόγω περιστροφής του συστήματος συντεταγμένων B με γωνιακή ταχύτητα ω ως προς το αδρανειακό σύστημα Ι. To σύμβολο ⦻ υποδηλώνει το εξωτερικό γινόμενο δυο διανυσμάτων.
Στην περίπτωση ενός στερεού συμμετρικού αεροσκάφους, η γραμμική και γωνιακή ταχύτητα του κέντρου βάρους του, καθώς και τα διανύσματα των εξωτερικών δυνάμεων και ροπών είναι αντίστοιχα:
|
|
|
(3.6) |
|
|
|
(3.7) |
|
|
|
(3.8) |
|
|
|
(3.9) |
Οι ροπές αδράνειας του αεροσκάφους ορίζονται ως:
|
|
|
(3.10) |
|
|
|
(3.11) |
|
|
|
(3.12) |
|
|
|
(3.13) |
|
|
|
(3.14) |
|
|
|
(3.15) |
Παρατηρώντας ότι τα περισσότερα αεροσκάφη είναι συμμετρικά ως προς το επίπεδο Οxz και ότι η μάζα τους είναι ομοιόμορφα κατανεμημένη, ισχύει για τις ροπές αδράνειας ότι:
|
|
|
(3.16) |
Το σχήμα 3.5 δείχνει ως μία από τις ελάχιστες εξαιρέσεις αυτού του κανόνα την περίπτωση ενός αεροσκάφους (Blohm & Voss BV 141 B-0), όπου δεν ισχύει η υπόθεση της συμμετρικότητας ως προς το επίπεδο Οxz. Αντιθέτως, οι περισσότεροι πύραυλοι έχουν δύο επίπεδα συμμετρίας, το Οxz και το Οxy, οπότε ισχύει επιπλέον ότι Ixz = 0.
Στην περίπτωση αυτή, η στροφορμή Η του αεροσκάφους προσδιορίζεται από το μητρώο (τελεστή) των ροπών αδράνειας και τη γωνιακή ταχύτητα ως:
|
|
|
(3.17) |

Οι ρυθμοί μεταβολής της ταχύτητας και της στροφορμής στο σωματόδετο σύστημα συντεταγμένων B είναι αντίστοιχα:
|
|
|
(3.18) |
|
|
|
(3.19) |


Οι μεταβολές της ταχύτητας και της στροφορμής λόγω περιστροφής του σωματόδετου συστήματος συντεταγμένων B είναι αντίστοιχα:
|
|
|
(3.20) |
|
|
|
(3.21) |


Οι εξωτερικές δυνάμεις και ροπές, που εμφανίζονται στις σχέσεις (3.8),(3.9) είναι ένα άθροισμα συνιστωσών και σύμφωνα με την προσέγγιση του Bryan (1911), όπως αναφέρεται στο [3], εκφράζονται ως ακολούθως:
όπου οι δείκτες συμβολίζουν:
• a: αεροδυναμικές δυνάμεις,
• p: δυνάμεις λόγω εφαρμογής της ισχύος (ώθησης),
• c: δυνάμεις που προκύπτουν από την κίνηση των πηδαλίων,
• g: δυνάμεις βαρύτητας,
• d: δυνάμεις λόγω των ατμοσφαιρικών αναταράξεων.
Η παραπάνω προσέγγιση, αν και περιορισμένης εμβελείας, δίνει κατά πρώτον πολύ καλά αποτελέσματα για τα κλασσικά αεροσκάφη και κατά δεύτερον, προσφέρει μια ξεκάθαρη εικόνα για τους φυσικούς παράγοντες που επηρεάζουν τη δυναμική συμπεριφορά του αεροσκάφους. Τότε οι εξισώσεις (3.3),(3.4) γίνονται:
|
|
|
(3.23) |
Η δύναμη του βάρους Fg = mg, που επιδρά στο αεροσκάφος αναλύεται σε κάθε έναν από τους τρεις σωματόδετους άξονες. Σύμφωνα με την ανάλυση του Παραρτήματος (Euler), η ανάλυση αυτή οδηγεί στο εξής αποτέλεσμα:
|
|
|
(3.24) |
Επειδή η αρχή του σωματόδετου συστήματος ταυτίζεται με το κέντρο βάρους, δεν υφίσταται ροπή λόγω κάποιας συνιστώσας του βάρους, ως προς οποιονδήποτε άξονα. Επομένως:
|
|
|
(3.25) |
Οι εξισώσεις (3.23) ονομάζονται γενικευμένες εξισώσεις κίνησης του αεροσκάφους, παρόλο που για την παρουσίαση τους έχουν χρησιμοποιηθεί αρκετές παραδοχές. Οι μη γραμμικές εξισώσεις (3.23) σχηματίζουν ένα σύστημα έξι διαφορικών εξισώσεων που περιγράφουν την κίνηση ενός αεροσκάφους με τις U,V,W,P,Q,R ως εξαρτημένες μεταβλητές. Ο χρόνος είναι η ανεξάρτητη μεταβλητή. Η λύση των εξισώσεων (3.23) δεν είναι δυνατή αναλυτικά. Οι λόγοι για αυτό είναι οι ακόλουθοι:
• Τα δεξιά μέλη των έξι εξισώσεων (3.23) μεταβάλλονται με τον χρόνο και με τη μεταβολή των εξαρτημένων μεταβλητών U,V,W,P,Q,R. Αυτές οι αλληλεξαρτήσεις θα διερευνηθούν σε μεταγενέστερο στάδιο.
• Οι συνιστώσες των δυνάμεων λόγω της βαρύτητας στις σχέσεις (3.24) εξαρτώνται από τoν προσανατολισμό του αεροσκάφους σε σχέση με το γήινο σύστημα αξόνων. Αυτό θα εξεταστεί σε επόμενη παράγραφο.
4. Γραμμικοποίηση των εξισώσεων κίνησης
Η δυσκολία χειρισμού και επίλυσης των εξισώσεων (3.23) καθιστά απαραίτητη τη γραμμικοποίηση τους, ώστε γίνει ευχερέστερη και ταχύτερη η ανάλυση της δυναμικής συμπεριφοράς του αεροσκάφους.
4.1 Σταθερή (μόνιμη) κατάσταση και κατάσταση διαταραχής (perturbed)
Το αεροσκάφος θεωρείται αρχικά ότι βρίσκεται σε κατάσταση μόνιμης αντισταθμισμένης και ευθύγραμμης συμμετρικής πτήσης, (όχι κατ’ ανάγκη οριζόντιας), χωρίς κλίση, εκτροπή ή πλαγιολίσθηση. Για τον χαρακτηρισμό των μεταβλητών στη μόνιμη αντισταθμισμένη κατάσταση πτήσης χρησιμοποιείται ο δείκτης e (equilibrium). Πρέπει να σημειωθεί ότι σε κάποιες περιπτώσεις μπορεί τα δεδομένα που δίνονται για ένα αεροσκάφος να έχουν δείκτες 0 ή 1 για τα αντίστοιχα μεγέθη της μόνιμης κατάστασης, όπως συμβαίνει στα [5], [9], ενώ ο δείκτης 0 μπορεί επίσης, να αναφέρεται σε κατάσταση μηδενικής γωνίας πρόσπτωσης όταν συνοδεύει αεροδυναμικούς συντελεστές.
Οι τιμές των κινηματικών μεγεθών του αεροσκάφους στην κατάσταση αντισταθμισμένης πτήσης φαίνονται στον πίνακα 3.1:
|
|
Αντισταθμισμένη ισορροπία |
Κατάσταση διαταραχής |
|||||||
|
Γραμμικές ταχύτητες |
Ue |
Ve=0 |
We=0 |
U=Ue+u |
V=v |
W=w |
|
|
|
|
Γωνιακές ταχύτητες |
Pe=0 |
Qe=0 |
Re=0 |
P=p |
Q=q |
R=r |
|
|
|
|
Γωνίες |
Θe |
Φe |
Ψe |
Θ=Θe+θ |
Φ=φ |
Ψ=ψ |
|
|
|
Πίνακας 3.1 Συμβολισμός και τιμές κινηματικών μεγεθών του αεροσκάφους στην αρχική αντισταθμισμένη κατάσταση και στην κατάσταση διαταραχής
Οι τιμές των γωνιακών
ταχυτήτων Pe, Qe,
Re είναι
μηδενικές, επειδή το αεροσκάφος βρίσκεται σε ευθύγραμμη (οριζόντια) πτήση. Λόγω
της σχέσης (3.2), οι χρονικές παράγωγοι ![]() ,
,![]() ,
,![]() των γωνιών Euler είναι επίσης μηδενικές.
Λόγω της συμμετρικής πτήσης χωρίς κλίση, εκτροπή ή πλαγιολίσθηση, ισχύει ότι:
των γωνιών Euler είναι επίσης μηδενικές.
Λόγω της συμμετρικής πτήσης χωρίς κλίση, εκτροπή ή πλαγιολίσθηση, ισχύει ότι:
|
|
|
(3.26) |
|
|
|
(3.27) |
Επειδή η αρχική κατάσταση του αεροσκάφους είναι σταθερή, οι γωνιακές επιταχύνσεις των κινηματικών μεγεθών είναι επίσης μηδενικές:
|
|
|
(3.28) |
Tέλος, θεωρώντας ότι ο άξονας Οxe του αεροσκάφους είναι στην κατεύθυνση της ταχύτητας του αεροσκάφους (χρησιμοποιώντας δηλαδή σωματόδετο σύστημα αξόνων ευστάθειας ή ανέμου), ισχύει επίσης, ότι We = 0, όπως φαίνεται και στο σχ. 3.6.
Με τον όρο «κατάσταση διαταραχής» εννοείται η κατάσταση πτήσης κατά την οποία το αεροσκάφος απομακρύνεται από την κατάσταση αντισταθμισμένης ισορροπίας, είτε λόγω κάποιας ενέργειας του πιλότου, είτε λόγω ατμοσφαιρικών αναταράξεων, είτε για οποιοδήποτε άλλο φυσικό ή τεχνικό αίτιο. Όπως αναλύθηκε στο κεφάλαιο 2, εφόσον το αεροσκάφος είναι στατικά και δυναμικά ευσταθές, η κατάσταση διαταραχής θα αποσβεστεί μετά από κάποιο χρονικό διάστημα και το αεροσκάφος θα επιστρέψει στην κατάσταση αντιστάθμισης.
Στον πίνακα 3.1 φαίνονται οι τιμές των κινηματικών μεγεθών του αεροσκάφους μετά τη διαταραχή. Το μέγεθος των μεταβολών (διαταραχών) u, v, w, p, q, r των κινηματικών μεγεθών του αεροσκάφους στα πλαίσια της γραμμικής θεώρησης της δυναμικής πτήσης θεωρείται μικρό, έτσι ώστε να ισχύουν οι βασικές αρχές της θεωρίας μικρών διαταραχών.
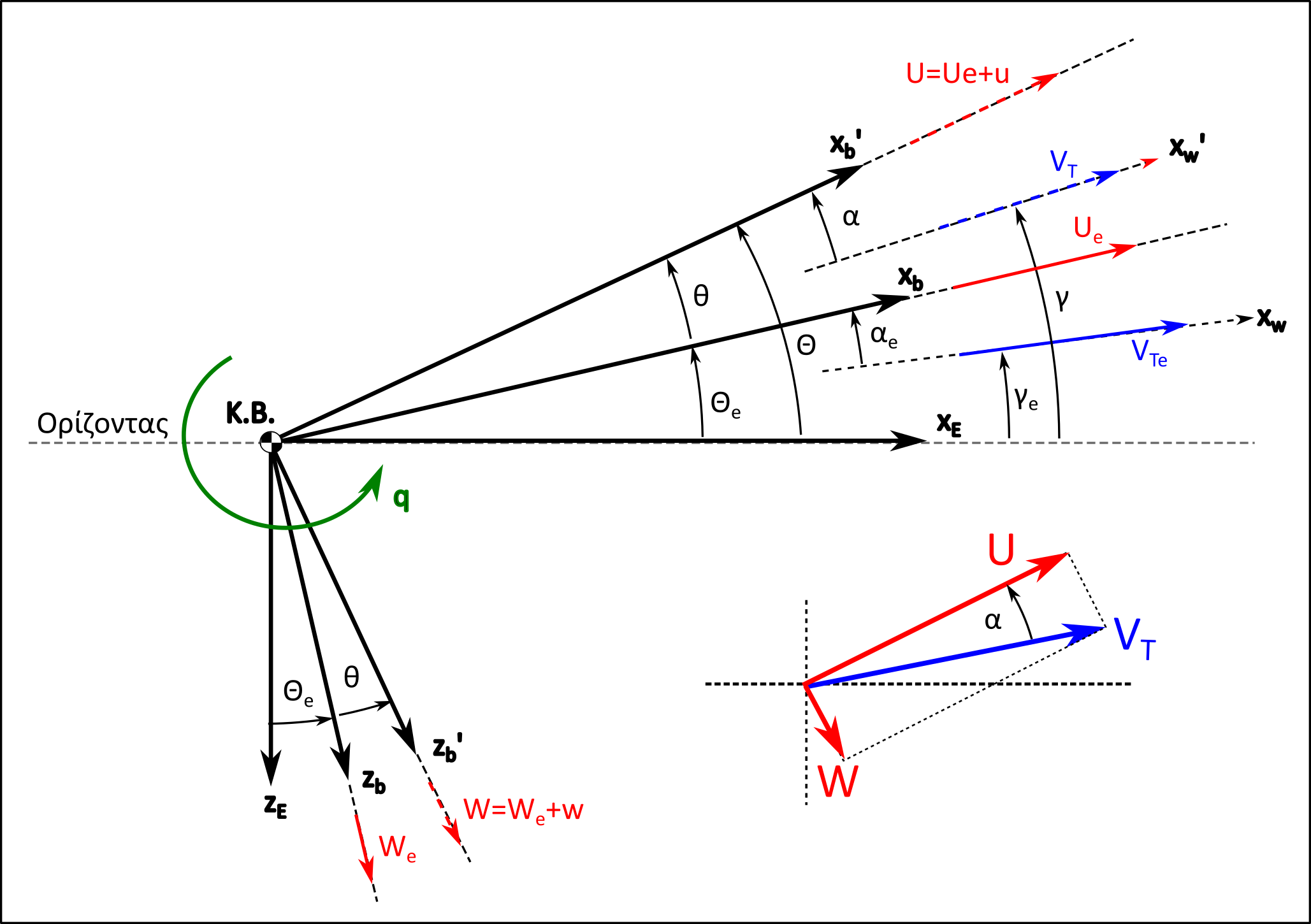
Σχήμα 3.6: Άξονες και κινηματικά μεγέθη του αεροσκάφους στο κατακόρυφο επίπεδο σε κατάσταση αντισταθμισμένης ισορροπίας και σε κατάσταση διαταραχής.
Κατά την κατάσταση διαταραχής μεταβάλλονται όχι μόνο τα κινηματικά μεγέθη του αεροσκάφους, αλλά και ο προσανατολισμός του σωματόδετου συστήματος συντεταγμένων λόγω αλλαγής της θέσης του αεροσκάφους, όπως φαίνεται στο σχ. 3.6. Έτσι, μετά τη διαταραχή η νέα ταχύτητα του αεροσκάφους βρίσκεται στον νέο «διαταραγμένο» άξονα xw’. Από το σχ. 3.6 προκύπτουν οι εξής σχέσεις μεταξύ των εικονιζόμενων γωνιών:
Διαταραχή α της γωνίας πρόσπτωσης:
|
|
|
(3.29) |
επειδή για μικρές γωνίες α σε rad ισχύει tan(α) = sin(α) = α.
Γωνία πρόνευσης:
|
|
|
(3.30) |

Γωνία ίχνους πτήσης στην αντιστάθμιση:
|
|
|
(3.31) |

Γωνία ίχνους πτήσης:
|
|
|
(3.32) |

ή
|
|
|
(3.33) |

για οριζόντια αντισταθμισμένη πτήση (Θe=0).
4.2 Γραμμικοποίηση των κινηματικών και των αδρανειακών όρων
Η αντικατάσταση στην εξίσωση (3.23) των κινηματικών μεγεθών μετά τη διαταραχή, όπως αυτά ορίζονται στον πίνακα 3.1, οδηγεί στη σχέση:
|
|
|
(3.34) |
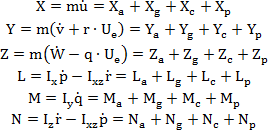
Οι απλοποιημένες εκφράσεις για τους αδρανειακούς όρους προέκυψαν επειδή η υπόθεση των μικρών διαταραχών ορίζει ότι οι ποσότητες (u, v, w) και οι (p, q, r) είναι μικρές, ώστε, μετά την εκτέλεση των πράξεων, οι όροι που περιέχουν γινόμενα και τετράγωνα των ποσοτήτων αυτών -οι οποίοι είναι και μη γραμμικοί- αποτελούν ποσότητες δεύτερης τάξης μεγέθους και μπορούν να αμεληθούν στους υπολογισμούς.
Με βάση την ίδια υπόθεση, και θεωρώντας επιπλέον ότι για μικρές γωνίες διαταραχών ισχύει επίσης, ότι cos(δ)≈1, sin(δ)=δ (δ σε rad) οι σχέσεις (3.2) για τις διαταραχές των γωνιακών ταχυτήτων γράφονται:
|
|
|
(3.35) |
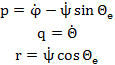
Όταν η πτήση του αεροσκάφους είναι οριζόντια ή πολύ κοντά σε αυτή (οι γωνίες ανόδου και καθόδου των συμβατικών αεροσκαφών είναι πολύ μικρές), οι εξισώσεις (3.35) μπορούν να προσεγγιστούν από τις σχέσεις :
|
|
|
(3.36) |
4.3. Γραμμικοποίηση των αεροδυναμικών όρων
Για να περιγραφούν με σαφήνεια οι αεροδυναμικές μεταβολές που συμβαίνουν στο αεροσκάφος κατά την εφαρμογή της διαταραχής, απαιτείται η εύρεση μιας κατάλληλης μεθόδου η οποία θα λαμβάνει υπόψη όλες ή τουλάχιστον τις περισσότερες από τις αλληλεπιδράσεις της κίνησης. Η μέθοδος που χρησιμοποιείται εδώ είναι αυτή που εισάχθηκε πρώτα από τον Bryan (1911). Η μέθοδος αυτή έχει περιορισμένη εμβέλεια ενώ δίνει πολύ καλά αποτελέσματα στα κλασσικά αεροσκάφη, καθώς και εκεί όπου η διαταραγμένη κίνηση είναι μικρού εύρους.
Η συνηθισμένη διαδικασία στηρίζεται στην υπόθεση ότι οι όροι των αεροδυναμικών δυνάμεων και ροπών στις εξισώσεις (3.23) εξαρτώνται μόνο από τις μεταβλητές κίνησης και από τις παραγώγους αυτών. Αυτή η πρόταση εκφράζεται μαθηματικά με ένα άθροισμα από σειρές Taylor με κάθε σειρά να περιλαμβάνει μία μεταβλητή κίνησης ή την παράγωγο μίας μεταβλητής κίνησης. Από τη στιγμή που ως μεταβλητές κίνησης ορίστηκαν οι (u, v, w) και (p, q, r), ενδεικτικά ο αεροδυναμικός όρος Χa στην εξίσωση της αξονικής δύναμης θα γραφτεί ως εξής:
|
|
|
(3.37) |
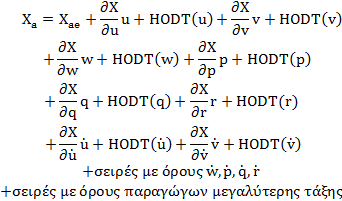
Η ποσότητα Xae είναι σταθερός
όρος και περιγράφει τις αεροδυναμικές δυνάμεις στη μόνιμη αντισταθμισμένη
κατάσταση πτήσης. Η ποσότητα ΗΟΤD περιγράφει
όρους με παραγώγους ανώτερης τάξης. Καθώς οι μεταβλητές κίνησης είναι μικρές
ποσότητες, μόνο οι πρώτοι όροι σε κάθε μια από τις πιο πάνω σειρές θα έχουν
σημαντικό μέγεθος. Οι μόνες αξιοσημείωτες σειρές που περιλαμβάνουν παραγώγους
μεγαλύτερης τάξης και που συχνά λαμβάνονται υπόψη, είναι αυτές της ποσότητας ![]() [3]. Έτσι, η πιο πάνω εξίσωση
μπορεί να καταλήξει στην:
[3]. Έτσι, η πιο πάνω εξίσωση
μπορεί να καταλήξει στην:
|
|
|
(3.38) |
ή με εναλλακτικό συμβολισμό :
|
|
|
(3.39) |
Με παρόμοιο τρόπο προκύπτουν και οι υπόλοιποι αεροδυναμικοί όροι (Ya, Za, La, Ma,Na) στην (3.22). Έτσι, για παράδειγμα, ο αεροδυναμικός όρος για την εξίσωση της ροπής περιστροφής προκύπτει:
|
|
|
(3.40) |
Οι όροι ![]() ,
,![]() ,
,![]() κλπ,
ονομάζονται «αεροδυναμικές παράγωγοι ευστάθειας» οι θα αναλυθούν εκτεταμένα στο
Κεφ. 6. Το σύμβολο «~» (περισπωμένη), δηλώνει ότι πρόκειται για διαστατές
μεταβλητές. Για παράδειγμα, η παράγωγος
κλπ,
ονομάζονται «αεροδυναμικές παράγωγοι ευστάθειας» οι θα αναλυθούν εκτεταμένα στο
Κεφ. 6. Το σύμβολο «~» (περισπωμένη), δηλώνει ότι πρόκειται για διαστατές
μεταβλητές. Για παράδειγμα, η παράγωγος ![]() έχει
μονάδες μέτρησης δύναμης προς ταχύτητας, δηλαδή:
έχει
μονάδες μέτρησης δύναμης προς ταχύτητας, δηλαδή:
|
|
|
|
Όμοια για κάθε μια από τις παραγώγους ευστάθειας προκύπτουν εύκολα οι μονάδες της. Ο σκοπός που γίνεται ο διαχωρισμός με την περισπωμένη «~», είναι διότι, όπως θα φανεί στη συνέχεια, υφίστανται διάφορες παραλλαγές των ορισμών των παραγώγων ευστάθειας (αδιάστατες, βορειοαμερικανική σημειολογία, συντετμημένες κ.ά.).
4.4. Οι γραμμικές συνιστώσες της βαρυτικής δύναμης
Στην κατάσταση της μόνιμης αντισταθμισμένης πτήσης, το αεροσκάφος πετά με τις πτέρυγες οριζόντιες (Φe=0) στην αρχική συμμετρική κατάσταση πτήσης, οπότε οι συνιστώσες του βάρους εμφανίζονται μόνο στο επίπεδο συμμετρίας όπως φαίνεται στο σχήμα 3.7. Έτσι, στη μόνιμη κατάσταση οι συνιστώσες του βάρους προκύπτουν από τη σχέση (3.24) ως:
|
|
|
(3.41) |
Οι διαταραχές των δυνάμεων της βαρύτητας υπολογίζονται με τον ίδιο τρόπο που χρησιμοποιήθηκε στις αδρανειακές δυνάμεις, εάν γραμμικοποιηθούν και οι βαρυτικές δυνάμεις. Με βάση τη σχέση (3.24) π.χ., προκύπτει ότι:
|
|
|
(3.42) |

Θεωρώντας ότι οι διαταραχές θ, φ είναι μικρές, η σχέση (3.41) οδηγεί:
|
|
|
(3.43) |

Επομένως, στις εξισώσεις κίνησης των μικρών διαταραχών οι συνιστώσες της δύναμης της βαρύτητας θα δίνονται ως:
|
|
|
(3.44) |
Επιπλέον, επειδή η αρχή του σωματόδετου συστήματος ταυτίζεται με το κέντρο βάρους, δεν υφίσταται ροπή λόγω κάποιας συνιστώσας του βάρους, ως προς οποιονδήποτε άξονα. Επομένως, εξακολουθεί να ισχύει η σχέση (3.25):
|
|
|
|
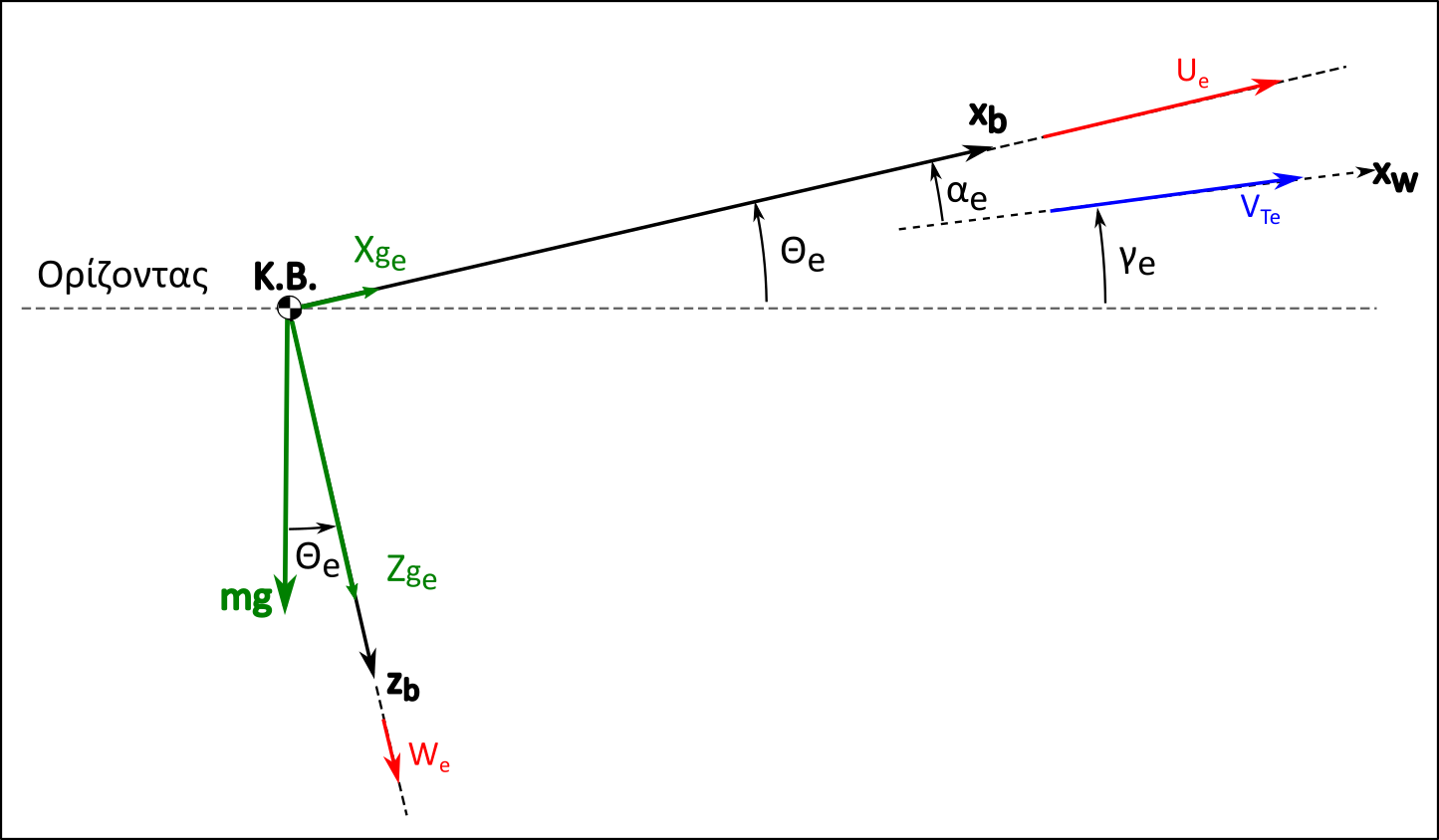
Σχήμα 3.7 Συνιστώσες βαρυτικής δύναμης στη μόνιμη κατάσταση αντισταθμισμένης πτήσης και μετά τη διαταραχή
4.5. Οι γραμμικοί όροι του αεροδυναμικού ελέγχου
Στο αεροσκάφος, ο αεροδυναμικός έλεγχος πραγματοποιείται από το πηδάλιο ανόδου-καθόδου, τα πηδάλια κλίσης και το πηδάλιο εκτροπής. Καθώς οι δυνάμεις και οι ροπές που δημιουργούνται από τις αποκλίσεις των πηδαλίων προκαλούνται ουσιαστικά από τις μεταβολές στις αεροδυναμικές συνθήκες, είναι σύνηθες να περιγράφονται ποσοτικά τα αποτελέσματα των αποκλίσεων αυτών συναρτήσει των παραγώγων ευστάθειας του αεροδυναμικού ελέγχου. Έτσι, οι υποθέσεις που εφαρμόζονται στους αεροδυναμικούς όρους εφαρμόζονται επίσης και στους όρους αεροδυναμικού ελέγχου. Για παράδειγμα η ροπή πρόνευσης λόγω του αεροδυναμικού ελέγχου προκύπτει :
|
|
|
(3.45) |
Στην προηγούμενη εξίσωση οι γωνίες των πηδαλίων κλίσης,
ανόδου-καθόδου και διεύθυνσης συμβολίζονται με ![]() ,
,
![]() και
και
![]() αντίστοιχα.
Επειδή η εξίσωση αυτή περιγράφει τις επιδράσεις των αεροδυναμικών επιφανειών
ελέγχου σε σχέση με τις ισχύουσες συνθήκες ισορροπίας-αντιστάθμισης, θα πρέπει
να επισημανθεί ότι οι γωνίες ελέγχου
αντίστοιχα.
Επειδή η εξίσωση αυτή περιγράφει τις επιδράσεις των αεροδυναμικών επιφανειών
ελέγχου σε σχέση με τις ισχύουσες συνθήκες ισορροπίας-αντιστάθμισης, θα πρέπει
να επισημανθεί ότι οι γωνίες ελέγχου ![]() ,
,
![]() και
και
![]() ,
μετρούνται σχετικά με τις γωνίες αντιστάθμισης (ισορροπίας)
,
μετρούνται σχετικά με τις γωνίες αντιστάθμισης (ισορροπίας) ![]() αντίστοιχα.
Η σχετική ανάλυση παρατίθεται στο υποκεφάλαιο
3.2 του κεφαλαίου 2.
αντίστοιχα.
Η σχετική ανάλυση παρατίθεται στο υποκεφάλαιο
3.2 του κεφαλαίου 2.
Χρησιμοποιώντας τη σημειογραφία της προηγούμενης παραγράφου προκύπτει για τη ροπή Μc:
|
|
|
(3.46) |
όπου Mce, είναι η σταθερή ροπή που απαιτείται από τις αεροδυναμικές επιφάνειες ελέγχου για αντιστάθμιση.
Με τον ίδιο τρόπο μπορούν να προκύψουν και οι ανάλογοι αεροδυναμικοί όροι στις υπόλοιπες εξισώσεις κίνησης. Εφόσον είναι επιθυμητή η μελέτη της απόκρισης του αεροσκάφους σε σχέση με άλλες αεροδυναμικές επιφάνειες ελέγχου, όπως για παράδειγμα flaps, spoilers, slats κτλ., θα πρέπει να προστεθούν ανάλογοι όροι, τόσο στην προηγούμενη εξίσωση όσο και στις υπόλοιπες εξισώσεις κίνησης.
4.6. Οι γραμμικοί όροι ισχύος (ώσης)
Η ισχύς και επομένως η ώση Τ, ελέγχεται από τη
γωνία του μοχλού ελέγχου της ισχύος ![]() (μανέτα).
Η κίνηση της μανέτας προκαλεί μια αλλαγή στην ώση η οποία με τη σειρά της
προκαλεί μεταβολές στις συνιστώσες των δυνάμεων και των ροπών που επενεργούν
στο αεροσκάφος.
(μανέτα).
Η κίνηση της μανέτας προκαλεί μια αλλαγή στην ώση η οποία με τη σειρά της
προκαλεί μεταβολές στις συνιστώσες των δυνάμεων και των ροπών που επενεργούν
στο αεροσκάφος.
Όπως ισχύει και για τον αεροδυναμικό έλεγχο, οι μεταβολές στην ισχύ περιγράφονται σε σχέση με την κατάσταση αντιστάθμισης δηλαδή ο όρος “τ” περιγράφει τη διαταραχή της ώσης από την κατάσταση ισορροπίας “Τe”.
|
|
|
(3.47) |
Τα φαινόμενα αυτά περιγράφονται σε σχέση με τις παραγώγους ευστάθειας της ώσης του κινητήρα. Έτσι, για παράδειγμα η οριζόντια δύναμη λόγω της ώσης μπορεί να εκφραστεί ως:
|
|
|
(3.48) |
όπου Xpe είναι η σταθερή ώθηση του κινητήρα που απαιτείται κατά τη μόνιμη κατάσταση.
4.7. Οι ατμοσφαιρικές αναταράξεις
Υποθέτοντας σταθερή ατμοσφαιρική κατάσταση στα πλαίσια του παρόντος συγγράμματος, οι δυνάμεις λόγω ατμοσφαιρικών αναταράξεων είναι αμελητέες:
|
|
|
(3.49) |
4.8. Εξίσωση ισορροπίας στη μόνιμη κατάσταση αντιστάθμισης
Κατά τη μόνιμη αντισταθμισμένη πτήση όλες οι μεταβλητές της διαταραχής, καθώς και οι αντίστοιχες παράγωγοι τους είναι εξ ορισμού μηδενικές. Έτσι, στη μόνιμη κατάσταση, οι εξισώσεις (3.33) γίνονται:
|
|
|
(3.50) |
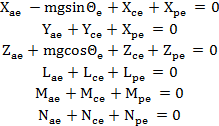
Οι εξισώσεις (3.50) είναι ουσιαστικά οι εξισώσεις στατικής ισορροπίας του αεροσκάφους, διάφορες μορφές της οποίας περιγράφηκαν στο υποκεφάλαιο 1.2. του κεφαλαίου 1.
4.9. Οι εξισώσεις κίνησης για μικρές διαταραχές
Με την αντικατάσταση των εκφράσεων των αεροδυναμικών όρων, των όρων της βαρύτητας, των όρων της ισχύος και τέλος των όρων του αεροδυναμικού ελέγχου στις εξισώσεις (3.33) και λαμβάνοντας υπόψη ότι οι μόνιμοι όροι των δυνάμεων και ροπών που εμφανίζονται λόγω αντιστάθμισης εξισορροπούνται λόγω της (3.50), προκύπτουν οι εξισώσεις:
|
|
|
(3.51) |

Οι εξισώσεις (3.51) ονομάζονται εξισώσεις μικρών διαταραχών της κίνησης του αεροσκάφους. Σε αντίθεση με τις μη γραμμικές εξισώσεις (3.23), οι εξισώσεις (3.51) είναι γραμμικές εξισώσεις και σχηματίζουν ένα σύστημα έξι διαφορικών εξισώσεων που περιγράφουν την κίνηση ενός αεροσκάφους με τις u, v, w, p, q, r ως εξαρτημένες μεταβλητές. Ο χρόνος είναι η ανεξάρτητη μεταβλητή. Η λύση των εξισώσεων (3.51) είναι πλέον δυνατή ακόμη και αναλυτικά.
Η συνοπτική παρουσίαση για τις μεθόδους επίλυσης των εξισώσεων αυτών υπάρχει στο παράρτημα Β. Η κατανόηση των μεθόδων και εννοιών όπως «συναρτήσεις μεταφοράς» και «χώρος κατάστασης», καθώς και των χαρακτηριστικών και ιδιοτήτων τους, είναι απαραίτητη στην ανάλυση που ακολουθεί στα επόμενα κεφάλαια.
Με τη χρήση αυτών των μεθόδων καθίσταται ευχερέστερη και ταχύτερη η ανάλυση της δυναμικής συμπεριφοράς του αεροσκάφους, γεγονός το οποίο μπορεί να αξιοποιηθεί για τον καλύτερο και ταχύτερο σχεδιασμό τόσο του ίδιου του αεροσκάφους, όσο και των διαφόρων συστημάτων ελέγχου της πτήσης («αυτόματων πιλότων») αλλά και για τη βαθύτερη φυσική κατανόηση των εγγενών φυσικών φαινομένων που χαρακτηρίζουν τη δυναμική της πτήσης και προσδιορίζουν χαρακτηριστικά της όπως η ευκολία και ποιότητα χειρισμών.
Για τη διατύπωση των εξισώσεων (3.51), το μέγεθος των μεταβολών (διαταραχών) u,v,w,p,q,r των κινηματικών μεγεθών του αεροσκάφους θεωρείται μικρό, ενώ επίσης, έχουν χρησιμοποιηθεί αρκετές πρόσθετες παραδοχές. Όμως αφού τα επιβατικά αεροσκάφη ως γνωστόν πετούν προσφέροντας τη μέγιστη δυνατή άνεση στους επιβάτες τους, μπορεί να θεωρηθεί ότι τέτοιες πτήσεις είναι πράγματι πτήσεις μικρών διαταραχών. Από την άλλη πλευρά, ακόμη και όταν πρόκειται για αεροσκάφη ειδικών αποστολών, επειδή συνήθως οι πτήσεις τους πρέπει επίσης να πραγματοποιούνται κάτω από συνθήκες μικρών διαταραχών (για παράδειγμα η άφεση φορτίων με ακρίβεια απαιτεί τέτοιες συνθήκες πτήσεως) η υπόθεση των μικρών διαταραχών δεν απέχει πολύ σε σχέση με το ότι ισχύει στην πραγματικότητα. Εξαίρεση στα παραπάνω αποτελούν οι πτήσεις αεροσκαφών οι οποίες πραγματοποιούνται ηθελημένα στα όρια του φακέλου πτήσης τους, καθώς και οι πτήσεις αεροσκαφών διαμέσου μεγάλων αναταράξεων.
Θα πρέπει να σημειωθεί ότι η προσέγγιση μικρών διαταραχών ισχύει ουσιαστικά σε ατμόσφαιρα σταθερής πυκνότητας και κατά συνέπεια ύψους. Ο λόγος είναι το γεγονός ότι οι αεροδυναμικές δυνάμεις και ροπές είναι όλες ανάλογες της δυναμικής πίεσης. Καθώς οι διαταραχές περιλαμβάνουν και φάσεις ανόδου/καθόδου του αεροσκάφους με μεταβολή του ύψους, μεταβάλλεται αντίστοιχα η πυκνότητα του αέρα και συνεπώς αεροδυναμικές δυνάμεις και ροπές. Στην πραγματικότητα, οι μεταβολές της πυκνότητας δεν υπερβαίνουν το 5% μέσα στους χρόνους κατά τους οποίους εξελίσσονται τα φαινόμενα της δυναμικής πτήσης.
Οι εξισώσεις (3.51) προβλέπουν μέσω των όρων εξωτερικών διεγέρσεων στο δεξί τους μέλος, ότι η αλλαγή κατάστασης της πτήσης του αεροσκάφους προέρχεται μόνο από ηθελημένη δράση του πιλότου -χειριστή ή «αυτόματου»- μέσω δράσης σε επιφάνεια αεροδυναμικού ελέγχου, ή μέσω μεταβολής ώθησης του κινητήρα.
Παρά το γεγονός ότι οι ατμοσφαιρικές αναταράξεις αμελούνται στα πλαίσια του παρόντος συγγράμματος [σχέσεις (3.49)], οι εξισώσεις (3.51) παρέχουν το υπόβαθρο και για την ανάλυση μικρών ατμοσφαιρικών αναταράξεων, με την εισαγωγή πρόσθετων κατάλληλων όρων εξωτερικών διεγέρσεων στο δεξί μέλος των εξισώσεων (3.51), είτε ντετερμινιστικών, είτε στοχαστικών.
5. Οι αποσυζευγμένες (decoupled) εξισώσεις κίνησης
Οι εξισώσεις των μικρών διαταραχών όπως διατυπώθηκαν μέχρι στιγμής στην εξίσωση (3.51) περιγράφουν την απόκριση του αεροσκάφους συναρτήσει των διαταραχών σε όλες τις κατευθύνσεις και περιστροφές περί όλους τους άξονες. Το σύστημα των έξι γραμμικών διαφορικών εξισώσεων έχει παρασταθεί με τον παραδοσιακό τρόπο, δηλαδή στο δεξιό μέρος περιλαμβάνονται οι διαταραχές εισόδου.
Για τα περισσότερα αεροσκάφη όμως κατά τη μεταβατική κίνηση των μικρών διαταραχών όπως εδώ, η σύζευξη των διαμήκων-εγκάρσιων εξισώσεων είναι αμελητέα. Αξιοποιώντας το γεγονός αυτό, είναι δυνατή η αποσύζευξη του συστήματος (3.51) σε δύο επί μέρους συστήματα εξισώσεων, τα οποία αφορούν ξεχωριστά την κίνηση σε διάμηκες και εγκάρσιο επίπεδο, μέσω κάποιων πρόσθετων παραδοχών.
5.1. Οι διαμήκεις εξισώσεις κίνησης
Η αποσυζευγμένη διαμήκης κίνηση νοείται ως η κίνηση του αεροσκάφους που προκύπτει ως απόκριση του αεροσκάφους σε μια διαταραχή που εφαρμόστηκε κατά το διάμηκες επίπεδο συμμετρίας Οxz. Η κίνηση αυτή επομένως περιγράφεται από τις εξισώσεις της αξονικής δύναμης X, της κάθετης δύναμης Z και της ροπής πρόνευσης M και μόνον από αυτές. Από τη στιγμή που δεν υπάρχει εγκάρσια κίνηση του αεροσκάφους, οι εγκάρσιες μεταβλητές κίνησης v, p, r, καθώς και οι παράγωγοι αυτών είναι μηδενικές.
Επίσης, η αποσυζευγμένη διαμήκης ή εγκάρσια κίνηση υποθέτει ότι οι αεροδυναμικές παράγωγοι σύζευξης είναι τόσο μικρές ώστε μπορούν να αγνοηθούν τελείως:
|
|
|
(3.52) |
Επειδή συνήθως οι αποκλίσεις των πηδαλίων κλίσεως και εκτροπής δεν προκαλούν κίνηση στο διάμηκες επίπεδο συμμετρίας οι πιο κάτω παράγωγοι του αεροδυναμικού ελέγχου μπορούν να θεωρηθούν επίσης μηδενικές :
|
|
|
(3.53) |
Επομένως οι αποσυζευγμένες εξισώσεις κίνησης προκύπτουν από την εξίσωση (3.51), διατηρώντας από αυτή, μόνο τις εξισώσεις για την αξονική δύναμη, την κάθετη δύναμη και τη ροπή πρόνευσης και εφαρμόζοντας στη συνέχεια τις σχέσεις (3.52) και (3.53):
|
|
|
(3.54) |
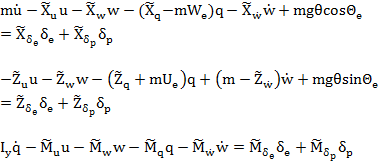
Εάν υποτεθεί ότι το αεροσκάφος βρίσκεται σε οριζόντια πτήση (Θe = 0):
|
|
|
(3.55) |

Περαιτέρω απλοποίηση των εξισώσεων αυτών μπορεί να πραγματοποιηθεί μόνον για συγκεκριμένες αριθμητικές τιμές των συντελεστών των πιο πάνω εξισώσεων, καθώς κάποιοι από αυτούς μπορεί να προκύψουν τόσο μικροί ώστε να μπορούν να αγνοηθούν. Οι αεροδυναμικές παράγωγοι ευστάθειας και ελέγχου μπορούν να αδιαστατοποιηθούν. Η χρησιμοποίηση τέτοιων αδιάστατων δεδομένων στις εξισώσεις (3.54) και (3.55), πραγματοποιείται εύκολα αφού όμως προηγουμένως τα δεδομένα αυτά μετατραπούν σε αδιάστατα. Όλοι οι σχετικοί ορισμοί-μετατροπές δίνονται στα Παραρτήματα Δ.1., Δ.2.
Θα πρέπει να σημειωθεί, ότι συχνότατα στη βιβλιογραφία, η κατακόρυφη διαταραχή w της ταχύτητας αντικαθίσταται από τη διαταραχή α της γωνίας πρόσπτωσης μέσω της σχέσης (3.29)
5.2. Οι εγκάρσιες-διεύθυνσης εξισώσεις κίνησης
Η αποσυζευγμένη εγκάρσια κίνηση και η ανάλογη κίνηση ως προς τη διεύθυνση περιλαμβάνει μόνο την κίνηση του αεροσκάφους ως προς την περιστροφή, την εκτροπή και την πλαγιολίσθηση. Η κίνηση αυτή περιγράφεται από τις εξισώσεις της πλάγιας δύναμης Y, της ροπής περιστροφής L και της ροπής εκτροπής Ν. Επειδή δεν υφίσταται διαμήκης κίνηση, οι διαμήκεις μεταβλητές κίνησης u, v, w, καθώς και οι αντίστοιχες παράγωγοί τους είναι μηδενικές. Επίσης, αποσυζευγμένη εγκάρσια κίνηση και κίνηση εκτροπής σημαίνει ότι οι αεροδυναμικές παράγωγοι σύζευξης είναι πολύ μικρές ώστε μπορούν να εξισωθούν με το μηδέν, δηλαδή:
|
|
|
(3.56) |

Με ανάλογο τρόπο επειδή η άτρακτος είναι συμμετρική, η απόκλιση του πηδαλίου ανόδου-καθόδου και οι μεταβολές της ώσης δεν προκαλούν εγκάρσια κίνηση ή ανάλογη κίνηση ως προς την εκτροπή, ενώ οι συζευγμένες αεροδυναμικές παράγωγοι ελέγχου, μπορούν επίσης να ληφθούν μηδενικές. Επομένως:
|
|
|
(3.57) |
Οι εξισώσεις της εγκάρσιας μη συμμετρικής κίνησης λαμβάνονται επομένως από την εξίσωση (3.51) εξάγοντας τις εξισώσεις της δύναμης, της ροπής περιστροφής και της ροπής εκτροπής και αντικαθιστώντας τις εξισώσεις (3.56) και (3.57):
|
|
|
(3.58) |

Για οριζόντια πτήση ισχύει:
|
|
|
(3.59) |

Όπως και στην περίπτωση των διαμήκων εξισώσεων επιπλέον απλοποίηση μπορεί να πραγματοποιηθεί μόνον για συγκεκριμένες αριθμητικές τιμές των συντελεστών, καθώς κάποιοι από αυτούς μπορεί να προκύψουν τόσο μικροί ώστε να μπορούν να απαλειφθούν. Φυσικά όπως αναφέρθηκε και προηγουμένως οι αεροδυναμικές παράγωγοι ευστάθειας και ελέγχου μπορούν να αδιαστατοποιηθούν. Όλοι οι σχετικοί ορισμοί-μετατροπές δίνονται στο παράρτημα Δ.3.
Βιβλιογραφία/Αναφορές
|
Michael V. Cook, Flight Dynamics Principles - A Linear Systems Approach to Aircraft Stability and Control, 2nd ed. Oxford, UK: Elsevier Ltd, 2007. |
|
|
[5] |
Robert C. Nelson, Flight Stability and Automatic Control, 2nd ed. Singapore: WCB/McGraw-Hill, 1998. |
|
[6] |
Bernard Etkin & Lloyd D. Reid, Dynamics of Flight: Stability and Control, 3rd ed. Toronto, Canada: John Wiley & Sons, Inc., 1996. |
|
Donald McLean, Automatic Flight Control Systems. Hertfordshire, UK: Prentice Hall International (UK) Ltd, 1990. |
|
|
John H. Blakelock, Automatic Control of Aircraft and Missiles, 2nd ed. New York, NY, USA: John Wiley & Sons, Inc., 1991. |
|
|
Duane T. McRuer, Dunstan Graham & Irving Ashkenas, Aircraft Dynamics and Automatic Control. Princeton, NJ, USA: Princeton Legacy Library, 1974. |
Παράδειγμα - Εφαρμογή
Παράδειγμα 3.1
Θεωρείται αεροσκάφος το οποίο βρίσκεται σε ευθύγραμμη, οριζόντια, συμμετρική και μόνιμη αντισταθμισμένη πτήση με ταχύτητα Ue σε ύψος Ηe. Η κατακόρυφη συμπεριφορά του αεροσκάφους στη μόνιμη αντισταθμισμένη κατάσταση πτήσης μπορεί να προσεγγισθεί από την εξίσωση ισορροπίας της άνωσης με το βάρος:
|
|
|
(Π3.1) |
Λόγω εξωτερικής διέγερσης, (π.χ. κλίσης του πηδαλίου ανόδου καθόδου), η πορεία του αεροσκάφους διαταράσσεται. Η κατακόρυφη συμπεριφορά του αεροσκάφους στις διαταραχές προσεγγίζεται από τη σχέση:
|
|
|
(Π3.2) |
H σχέση (Π3.2) μπορεί να θεωρηθεί ότι προκύπτει από τη δεύτερη εξίσωση του συστήματος (3.55) θεωρώντας ότι η διαταραχή της κατακόρυφης ταχύτητας w είναι ίση με τον ρυθμό μεταβολής της διαταραχής h του ύψους πτήσης (w=dh/dt), o ρυθμός πρόνευσης q είναι πολύ αργός και ότι όροι σύζευξης με τις υπόλοιπες κινήσεις του αεροσκάφους είναι πολύ μικροί.
Ο όρος ![]() προκύπτει
από την κατακόρυφη αεροδυναμική δύναμη (άνωση) με τη σχέση:
προκύπτει
από την κατακόρυφη αεροδυναμική δύναμη (άνωση) με τη σχέση:
|
|
|
(Π3.3) |
όπου U είναι το μέτρο της ταχύτητας του αεροσκάφους μετά τη διαταραχή. H ποσότητα (ρSCL) προκύπτει από την εξίσωση (Π3.1) ως:
|
|
|
(Π3.4) |
Θεωρώντας ότι κατά τη διαταραχή της πτήσης η συνολική ενέργεια του αεροσκάφους διατηρείται:
|
|
|
(Π3.5) |
Παραγωγίζοντας τη σχέση (Π3.5) ως προς h, προκύπτει:
|
|
|
(Π3.6) |
Αντικαθιστώντας τις (Π3.4),(Π3.6) στην εξίσωση (Π3.2), η κίνηση του αεροσκάφους διέπεται από τη σχέση:
|
|
|
(Π3.6) |
όπου
|
|
|
(Π3.7) |
H κίνηση δηλαδή του αεροσκάφους χαρακτηρίζεται από μια ταλάντωση με συχνότητα ω0. Οι σχέσεις (Π3.6),(Π3.7), προτάθηκαν για πρώτη φορά το 1908 από τον Lancaster. Όπως φαίνεται και από τη σύγκριση της (Π3.6) με την (4.43), χαρακτηρίζει ένα τρόπο ταλάντωσης του αεροσκάφους που ονομάζεται φυγοειδές και αναλύεται συστηματικότερα στο υποκεφάλαιο 4 του κεφ. 4.
Θα πρέπει να σημειωθεί, ότι η εκτίμηση της συχνότητας ω0 στη σχέση (Π3.7) εξαρτάται μόνο από την ταχύτητά του αεροσκάφους, ενώ είναι ανεξάρτητη από τα υπόλοιπα χαρακτηριστικά του αεροσκάφους. Δηλαδή αυτή η εκτίμηση είναι ίδια για όλα τα τυπικά αεροσκάφη. Αυτό υποδεικνύει ότι η ταλάντωση του φυγοειδούς είναι σύμφυτο χαρακτηριστικό της πτήσης.
Για ένα τυπικό αεροσκάφος που κινείται με ταχύτητα 871 ft/sec (265.5 m/sec), η συχνότητα προκύπτει ίση με ω0=0.0522 rad/sec και η αντίστοιχη περίοδος των ταλαντώσεων ίση με T0= 120.2907 sec.
4: ΔΙΑΜΗΚΗΣ ΔΥΝΑΜΙΚΗ
Σύνοψη
Από τη στιγμή που έχουν διαμορφωθεί οι εξισώσεις κίνησης μικρών διαταραχών του αεροσκάφους και έγινε η αποσύζευξή τους σε διαμήκεις και εγκάρσιες, μπορούν πλέον να μελετηθούν ξεχωριστά τα δύο αυτά μέρη της δυναμικής του αεροσκάφους. Στο κεφάλαιο αυτό αναλύεται η διαμήκης δυναμική και τα μοντέλα χαμηλότερης τάξης με τα οποία μπορεί να προσεγγιστεί. Επίσης, παρουσιάζονται εφαρμογές εξαγωγής των αποκρίσεων των μεταβλητών που εμπλέκονται στα πεδία του χρόνου και της συχνότητας.
Προαπαιτούμενη γνώση
Πέρα από τις δεδομένες γνώσεις γραμμικής άλγεβρας, απαιτούνται γενικές γνώσεις δυναμικής μηχανών, μοντελοποίησης και ελέγχου συστημάτων όπως και ανάλυσης στο πεδίο της συχνότητας με διαγράμματα Bode. Επίσης, είναι απαραίτητη η μελέτη των Παραρτημάτων Γ και Δ, για την κατανόηση της παράστασης των εξισώσεων κίνησης με συναρτήσεις μεταφοράς και στον χώρο κατάστασης.
1.Απόκριση σε εντολές ελέγχου
Η λύση των διαμήκων εξισώσεων κίνησης με τις μεθόδους που παρουσιάζονται στο παράρτημα Β μας οδηγεί στην εύρεση της συνάρτησης μεταφοράς του συστήματος (εκτεταμένη ανάλυση από τον Κρικέλη [10], [11]). Η συνάρτηση μεταφοράς περιγράφει πλήρως τη γραμμική δυναμική απόκριση σε μια είσοδο ελέγχου στο επίπεδο συμμετρίας. Τα χαρακτηριστικά ευστάθειας του αεροσκάφους, προσδιορίζουν και τις δυναμικές του ιδιότητες οι οποίες ουσιαστικά περιγράφονται από την απόκρισή του. Η συνάρτηση μεταφοράς αλλά και οι μεταβλητές της απόκρισης που περιγράφονται από αυτήν, είναι γραμμικές ποσότητες επειδή όλη η διαδικασία μοντελοποίησης έχει βασιστεί στην υπόθεση ότι η κίνηση αφορά μικρές διαταραχές γύρω από μια κατάσταση ισορροπίας. Παρ’ όλα αυτά αποτελεί κοινή πρακτική να υποτίθεται ότι η απόκριση του συστήματος είναι έγκυρη ακόμα και όταν το μέγεθός της δεν είναι τέτοιο ώστε να μπορεί να περιγραφεί με τον όρο «απόκριση μικρών διαταραχών».
Για τα περισσότερα συμβατικά αεροσκάφη, επειδή τείνουν να έχουν γραμμικά αεροδυναμικά χαρακτηριστικά σε ολόκληρο τον φάκελο πτήσης τους, το λάθος που υπεισέρχεται στους υπολογισμούς προκύπτει τόσο μικρό ώστε γίνεται αποδεκτό. Για αεροσκάφη με πραγματικά εκτεταμένο φάκελο πτήσης, με σημαντική μη γραμμικότητα στα αεροδυναμικά τους χαρακτηριστικά και/ή εξάρτηση της ομαλής πτήσης τους από πολύπλοκα συστήματα ελέγχου πτήσης, είναι θεμιτό να μην χρησιμοποιούνται οι γραμμικοποιημένες εξισώσεις κίνησης για την ανάλυση της απόκρισης, εκτός και αν αυτή η απόκριση μπορεί να χαρακτηριστεί ως μικρού εύρους.
Σε αυτό το σημείο είναι χρήσιμο να παρουσιαστεί ξανά η διαμήκης απόκριση σε σχέση με τις αποκλίσεις του πηδαλίου ανόδου-καθόδου, γύρω από μια θέση ισορροπίας, καθώς η ώση διατηρείται σταθερή. Το σύστημα των διαμήκων εξισώσεων μπορεί τότε να γραφεί:
|
|
|
(4.1) |

Οι τέσσερις συναρτήσεις μεταφοράς μπορούν να γραφούν στην κάτωθι πιο βολική μορφή που χρησιμοποιεί ο Cook [3]:
|
|
|
(4.2) |
|
|
|
(4.3) |
|
|
|
(4.4) |
|
|
|
(4.5) |
όπου
• Τ: χρονική σταθερά,
• ω: φυσική συχνότητα χωρίς απόσβεση [rad/sec],
• ζ: συντελεστής απόσβεσης,
• p (phugoid): δείκτης φυγοειδούς,
• s (short period): δείκτης μικρής περιόδου.
Οι συναρτήσεις μεταφοράς των μεταβλητών κατάστασης της διαμήκους δυναμικής προς τις εισόδους, εκφράζονται ως κλάσματα πολυωνύμων με διαφορετικούς αριθμητές και με κοινό παρονομαστή που περιγράφονται στο παράρτημα Γ.3.1. Τα πολυώνυμα παραγοντοποιούνται σε πραγματικά και μιγαδικά ζεύγη ριζών ώστε να συμβαδίζουν με τις μορφές που δόθηκαν πιο πάνω. Περισσότερα για την ανάλυση συστημάτων, παρουσιάζονται στο παράρτημα Β. Όταν οι ρίζες των πολυωνύμων εκφραστούν συναρτήσει των χρονικών σταθερών, των λόγων απόσβεσης και των φυσικών συχνοτήτων τότε λαμβάνονται άμεσα οι απαιτούμενες πληροφορίες που χαρακτηρίζουν τη δυναμική της απόκρισης. Πρέπει επίσης να σημειωθεί, ότι οι παράγοντες των αριθμητών και των παρονομαστών αποτελούν τις τυπικές μορφές που ισχύουν για ένα συμβατικό αεροσκάφος.
2.Η χαρακτηριστική εξίσωση
Όπως έχει ήδη περιγραφεί ο κοινός παρονομαστής των συναρτήσεων μεταφοράς αποτελεί το χαρακτηριστικό πολυώνυμο το οποίο με τη σειρά του περιγράφει τα χαρακτηριστικά ευστάθειας του αεροσκάφους. Έτσι, η απόκριση όλων των μεταβλητών ως προς τη μεταβολή του πηδαλίου ανόδου-καθόδου κυριαρχείται από τις παραμέτρους του παρονομαστή, δηλαδή τους λόγους απόσβεσης και τις φυσικές συχνότητες. Οι διαφορές που προκύπτουν ανάμεσα σε κάθε μια απόκριση οφείλονται κατά κύριο λόγο στους αντίστοιχους αριθμητές. Είναι απαραίτητο επομένως να αποτιμηθεί ο ρόλος του αριθμητή στη διαμόρφωση της δυναμικής απόκρισης του αεροσκάφους. Οι γενικές μορφές των αποκρίσεων των μεταβλητών καθορίζονται από τους κοινούς παρονομαστές και «χρωματίζονται» από τους διαφορετικούς κάθε φορά αριθμητές. Ο αριθμητής δεν παίζει κανένα ρόλο στον καθορισμό της ευστάθειας ενός γραμμικού συστήματος.
Το διάμηκες χαρακτηριστικό πολυώνυμο για ένα κλασσικό αεροσκάφος είναι τετάρτου βαθμού, αποτελεί τον κοινό παρονομαστή των συναρτήσεων μεταφοράς και εξισώνοντας το με το μηδέν αποτελεί τη χαρακτηριστική εξίσωση:
|
|
|
(4.6) |
Γενικά η χαρακτηριστική εξίσωση παραγοντοποιείται σε δύο ζεύγη ριζών και μπορεί να γραφτεί:
|
|
|
(4.7) |
Δηλαδή η απόκριση του αεροσκάφους είναι υπέρθεση δύο μορφών ταλαντώσεων, της μικρής περιόδου και του φυγοειδούς, σύμφωνα με το [6], οι οποίες εξετάζονται στη συνέχεια. Η γραφή της χαρακτηριστικής εξίσωσης κατά αυτόν τον τρόπο είναι ανάλογη με την αντίστοιχη γραφή για το σύστημα 2ης τάξης μάζας-ελατηρίου-αποσβεστήρα όπως περιγράφεται στο παράρτημα Β.2.2. Έτσι, η διαμήκης δυναμική του αεροσκάφους έχει μεγάλες ομοιότητες μ’ ένα ζεύγος από συνδεδεμένα συστήματα μάζας-ελατηρίου-αποσβεστήρα.
Βέβαια τα χαρακτηριστικά της συχνότητας και της απόσβεσης προφανώς δεν έχουν μηχανική προέλευση αλλά προέρχονται από τις αεροδυναμικές ιδιότητες του αεροσκάφους. Η σύνδεση μεταξύ της δυναμικής του αεροσκάφους και των αεροδυναμικών του χαρακτηριστικών, που είναι μια δύσκολη και επίπονη διαδικασία -περισσότερα στο κεφάλαιο 6- που πραγματοποιείται με τη σύγκριση των εξισώσεων (4.10), (4.11) και στη συνέχεια τη λήψη των ορισμών, ως προς τις αεροδυναμικές παραγώγους ευστάθειας, για τους συντελεστές της εξίσωσης (4.6) από το παράρτημα Γ.3.1.
3.Ταλάντωση πρόνευσης μικρής περιόδου
Κάθε φορά που το αεροσκάφος διαταράσσεται από τη θέση ισορροπίας, συνυπάρχουν και οι δύο μορφές διαμήκους δυναμικής ευστάθειας. Η διαταραχή ως προς την κατάσταση ισορροπίας μπορεί να προκληθεί από τις εντολές του πιλότου στα πηδάλια ελέγχου, κάποια μεταβολή στην ισχύ του αεροσκάφους, αλλαγές στη διαμόρφωση –για παράδειγμα έκταση των flaps- καθώς και από εξωτερικούς παράγοντες όπως ατμοσφαιρικές αναταράξεις, ριπές ανέμου κ.ά.
Η μορφή (mode) της μικρής περιόδου ή αλλιώς ταχείας προσαρμογής της γωνίας πρόσπτωσης (rapid incidence adjustment), τυπικά είναι μία αποσβενόμενη ταλάντωση ως προς τη στάση πρόνευσης, περί τον άξονα oy όπως δείχνει το σχήμα 4.1. Εμφανίζεται ως μία κλασσική ταλάντωση δευτέρου βαθμού, στην οποία οι κυρίες μεταβλητές είναι η γωνία πρόσπτωσης αw, ο ρυθμός πρόνευσης q και η στάση πρόνευσης θ. Το γεγονός αυτό θα γίνει φανερό στο αριθμητικό παράδειγμα 4.1 στο τέλος του κεφαλαίου, μέσω της ιδιοδιανυσματικής ανάλυσης. Τυπικά, η φυσική συχνότητα χωρίς απόσβεση είναι ωs ~ 1:10 rad/sec, ενώ η απόσβεση ζs σταθεροποιεί το αεροσκάφος, αν και ο λόγος απόσβεσης είναι συχνά χαμηλότερος του επιθυμητού. Ένα βασικό χαρακτηριστικό της μορφής αυτής είναι ότι η ταχύτητα U παραμένει κατά προσέγγιση σταθερή (u=0). Καθώς η περίοδος της μορφής είναι μικρή, οι επιδράσεις της αδράνειας και της ορμής καθορίζουν ότι η απόκριση της ταχύτητας στη χρονική κλίμακα που αντιστοιχεί η μορφή αυτή είναι αμελητέα.
|
|
|
(4.8) |
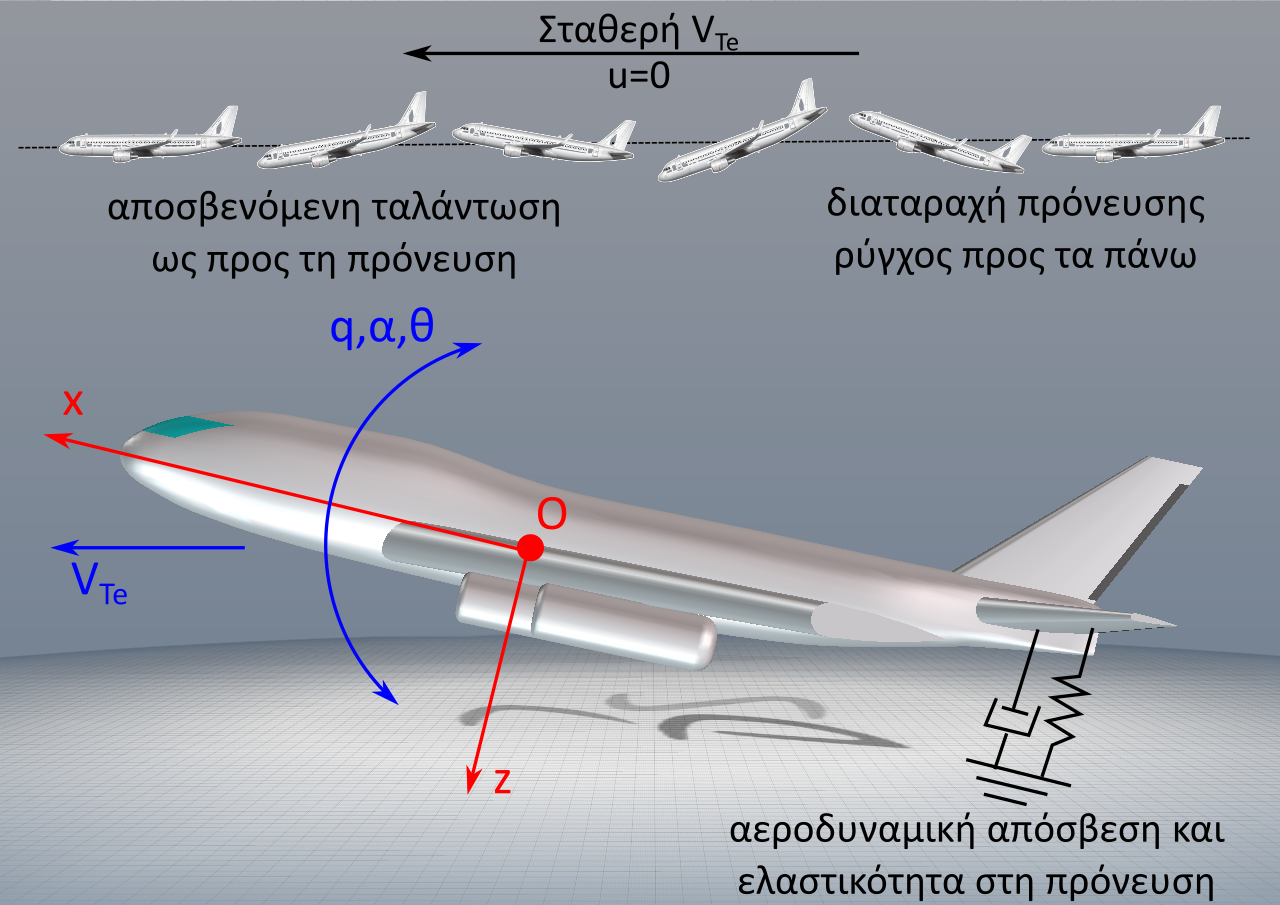
Σχήμα 4.1 Μηχανικό δυναμικό ισοδύναμο της ταλάντωσης μικρής περιόδου
Βίντεο 4.1 Αναπαράσταση της ταλάντωσης της μικρής περιόδου.
Για να γίνουν πιο κατανοητές οι φυσικές διεργασίες που λαμβάνουν χώρα, συγκρίνεται το αεροσκάφος με το κλασσικό, μηχανικό, δυναμικό σύστημα, μάζας-ελατηρίου-αποσβεστήρα. Το αεροσκάφος συμπεριφέρεται σαν να ήταν αγκιστρωμένο, κατά τον άξονα oy, από ένα ελατήριο όπως στο σχήμα 4.1. Μια διαταραχή πρόνευσης ως προς την κατάσταση ισορροπίας αναγκάζει το ελατήριο να παράγει μια ροπή επαναφοράς και επακόλουθα να προκαλεί μια ταλάντωση ως προς τη στάση πρόνευσης. Η ακαμψία του ελατηρίου έχει ως ρίζα της τη φυσική «ανεμουριακή» (weathercock) τάση του αεροσκάφους δηλαδή την τάση της κεφαλής ή της ουράς του αεροσκάφους να ευθυγραμμίζεται με τον σχετικό άνεμο. Η ταλάντωση είναι αποσβενόμενη το οποίο παριστάνεται στο σχήμα 4.1 με έναν αποσβεστήρα. Η απόσβεση προκύπτει από την κίνηση της ουράς κατά τη διάρκεια της ταλάντωσης όπου συμπεριφέρεται ως ένας συνεκτικός αποσβεστήρας κραδασμών.
Φυσικά τα αίτια της συμπεριφοράς του αεροσκάφους, που εδώ οφείλονται στο ελατήριο και στον αποσβεστήρα, δεν είναι σε καμία περίπτωση μηχανικά αλλά προκαλούνται από αεροδυναμικούς μηχανισμούς. Κάθε δομικό μέρος του αεροσκάφους συνεισφέρει στη μορφή της ταλάντωσης, ενώ μπορεί να έχει θετική ή και αρνητική επίδραση στην ευστάθεια. Για λόγους απλότητας, υποτίθεται ότι το κυρίαρχο, αεροδυναμικό, δομικό κομμάτι που καθορίζει τα χαρακτηριστικά απόσβεσης και επαναφοράς, είναι το ουραίο πτέρωμα.
Η δυναμική συμπεριφορά του αεροσκάφους δεν εξαρτάται μόνο από την επίδραση της ουράς του αεροσκάφους αλλά και από ένα εύρος άλλων επιδράσεων που προκύπτουν από άλλα μέρη του αεροσκάφους. Όταν η συνολική ευστάθεια είναι οριακή εννοείται ότι οι επιπρόσθετες επιδράσεις είναι σημαντικές και έτσι καθίσταται πολύ πιο δύσκολο να τυποποιηθούν αλλά και να περιγραφούν ποσοτικά οι κυρίαρχοι, αεροδυναμικοί παράγοντες μορφοποίησης του τύπου της ταλάντωσης.
4.Το φυγοειδές
Πρόκειται κατά κύριο λόγο για μια ελαφρά αποσβενόμενη, ταλάντωση χαμηλής συχνότητας στην ταχύτητα U, συζευγμένη με τη γωνία πρόνευσης θ και το ύψος h. Ένα κύριο χαρακτηριστικό του φυγοειδούς είναι ότι η γωνία πρόσπτωσης αw παραμένει ουσιαστικά σταθερή κατά τη διάρκεια της διαταραχής.
Το φαινόμενο αυτό γίνεται φανερό στο αριθμητικό παράδειγμα 4.1, μέσω της ιδιοδιανυσματικής ανάλυσης. Παρόλο που το φυγοειδές εμφανίζεται σε διαφορετικό βαθμό, σε όλες τις διαμήκεις μεταβλητές της κίνησης, είναι επιτρεπτό να αμεληθεί η παρουσία των συνιστωσών του φυγοειδούς στη γωνία πρόσπτωσης αw και στον ρυθμό πρόνευσης q, εφόσον το σχετικό μέγεθος είναι πολύ μικρό συγκρινόμενο με τις υπόλοιπες μεταβλητές κατάστασης.
Τυπικές τιμές για τη φυσική συχνότητα χωρίς απόσβεση του φυγοειδούς είναι της τάξης του ωp ~ 0.1 : 1 rad/sec ενώ ο λόγος απόσβεσης είναι πολύ μικρός. Τα χαρακτηριστικά απόσβεσης του φυγοειδούς σε ορισμένα αεροσκάφη μπορεί να επηρεαστούν σημαντικά από τη μεταβολή της παρεχόμενης ισχύος των κινητήρων.
Βίντεο 4.2 Αναπαράσταση της ταλάντωσης του φυγοειδούς.
Ποιοτικά η εξέλιξη της ταλαντωτικής κίνησης του φυγοειδούς που προκαλείται μετά από την εφαρμογή μιας διαταραχής από την κατάσταση αντιστάθμισης, φαίνεται στο σχήμα 4.2 και περιγράφεται ως εξής:
•
Εικόνα (a): Το αεροσκάφος είναι αντισταθμισμένο σε οριζόντια
πτήση ισορροπίας με μόνιμη ταχύτητα U ≅ ![]() οπότε
ισχύει L=mg. Τότε το αεροσκάφος δέχεται τη διαταραχή από
την κατάσταση αντιστάθμισης.
οπότε
ισχύει L=mg. Τότε το αεροσκάφος δέχεται τη διαταραχή από
την κατάσταση αντιστάθμισης.
•
Εικόνα (b): Η διαταραχή αντιστοιχεί σε μείωση της ταχύτητας κατά τη
μικρή ποσότητα u. Η γωνία πρόσπτωσης παραμένει ουσιαστικά σταθερή, αυτό οδηγεί
σε μια μικρή μείωση της άνωσης και το αεροσκάφος δεν βρίσκεται πλέον σε
κατακόρυφη ισορροπία. Αρχίζει επομένως να χάνει ύψος και καθώς κατέρχεται
αρχίζει να επιταχύνεται όπως φαίνεται στην εικόνα. Η ταχύτητα συνεχίζει να
αυξάνεται ξεπερνώντας μάλιστα την τιμή ![]() ,
ενώ η άνωση, καθώς επίσης αυξάνεται, κάποια χρονική στιγμή ξεπερνά σε μέγεθος
το βάρος. Η αύξηση της ταχύτητας και την άνωσης οδηγεί σε σταθερή άνοδο της
κεφαλής του αεροσκάφους.
,
ενώ η άνωση, καθώς επίσης αυξάνεται, κάποια χρονική στιγμή ξεπερνά σε μέγεθος
το βάρος. Η αύξηση της ταχύτητας και την άνωσης οδηγεί σε σταθερή άνοδο της
κεφαλής του αεροσκάφους.
• Εικόνα (c): Πλέον το αεροσκάφος ξεκινά την άνοδο.
• Εικόνα (d): Καθώς το αεροσκάφος πλέον έχει περίσσεια κινητικής ενέργειας, η αδράνεια και η ορμή το αναγκάζουν να ξεπεράσει το αρχικό ύψος χάνοντας παράλληλα ταχύτητα και άνωση, καθώς ανέρχεται. Όσο το αεροσκάφος επιβραδύνεται η κεφαλή του στρέφεται προς τα κάτω.
• Εικόνας (e): Η άνωση είναι αρκετά μικρότερη από το βάρος και η επιταχυνόμενη κάθοδος ξεκινά για μια ακόμη φορά.
• Εικόνα (f): Η αδράνεια και η ορμή εξαναγκάζουν το αεροσκάφος να συνεχίζει την κάθοδο διαμέσου του αρχικού ύψους και καθώς η ταχύτητα και ή άνωση του αυξάνονται προοδευτικά, η κεφαλή του στρέφεται προς τα πάνω.
• Εικόνα (g): Φτάνοντας σε οριζόντια θέση το αεροσκάφος ξεκινά ξανά την άνοδο και ολοκληρώνεται ο κύκλος της ταλάντωσης του φυγοειδούς. Η κίνηση συνεχίζεται με τις επιδράσεις της οπισθέλκουσας να εξαναγκάζουν τα μέγιστα και τα ελάχιστα της κίνησης να μειώνονται προοδευτικά σε μέγεθος, έως ότου η κίνηση αποσβεστεί.
Το φυγοειδές λοιπόν είναι μια κλασσική αποσβενόμενη αρμονική
κίνηση που οδηγεί το αεροσκάφος να πετά σε ένα ομαλό ημιτονοειδές ίχνος πτήσης
γύρω από το αρχικό ύψος πτήσης όπου το αεροσκάφος πετούσε αντισταθμισμένο και
σε οριζόντια πτήση. Καθώς οι επιδράσεις της αδράνειας και της ορμής είναι
μεγάλες το φαινόμενο είναι αργό, οι γωνιακές επιταχύνσεις ![]() και
και
![]() είναι
μικρές και μπορούν να αγνοηθούν για τη συνέχεια των υπολογισμών. Κατά συνέπεια
η φυσική συχνότητα του φυγοειδούς είναι χαμηλή και καθώς η οπισθέλκουσα
προβλέπεται εξ αρχής χαμηλή, έτσι και η απόσβεση είναι χαμηλή. Τυπικά από την
έναρξη της ταλάντωσης του φυγοειδούς, μπορούν να παρατηρηθούν πολλοί κύκλοι
πριν τελικά η κίνηση αποσβεστεί. Επίσης, καθώς ο ρυθμός απώλειας της ενέργειας
είναι μικρός, λόγω της μικρής απόσβεσης που προκαλεί η χαμηλή οπισθέλκουσα, η
κίνηση συχνά προσεγγίζεται από μια μη αποσβενόμενη αρμονική κίνηση στην οποία η
δυναμική και η κινητική ενέργεια «εναλλάσσονται».
είναι
μικρές και μπορούν να αγνοηθούν για τη συνέχεια των υπολογισμών. Κατά συνέπεια
η φυσική συχνότητα του φυγοειδούς είναι χαμηλή και καθώς η οπισθέλκουσα
προβλέπεται εξ αρχής χαμηλή, έτσι και η απόσβεση είναι χαμηλή. Τυπικά από την
έναρξη της ταλάντωσης του φυγοειδούς, μπορούν να παρατηρηθούν πολλοί κύκλοι
πριν τελικά η κίνηση αποσβεστεί. Επίσης, καθώς ο ρυθμός απώλειας της ενέργειας
είναι μικρός, λόγω της μικρής απόσβεσης που προκαλεί η χαμηλή οπισθέλκουσα, η
κίνηση συχνά προσεγγίζεται από μια μη αποσβενόμενη αρμονική κίνηση στην οποία η
δυναμική και η κινητική ενέργεια «εναλλάσσονται».
5. Μοντέλα χαμηλότερης τάξης
Έως αυτή τη στιγμή η έμφαση έχει δοθεί στην ακριβή λύση των διαμήκων εξισώσεων κίνησης που οδηγεί στην ακριβή περιγραφή των χαρακτηριστικών ευστάθειας και απόκρισης του αεροσκάφους. Στη πραγματικότητα όμως απαιτούνται μεγάλα υπολογιστικά συστήματα και επίσης, είναι δύσκολο έως αδύνατο, να διατυπωθούν ακριβείς σχέσεις που συνδέουν τα χαρακτηριστικά ευστάθειας με τα αντίστοιχα αεροδυναμικά χαρακτηριστικά του αεροσκάφους. Για τον λόγο αυτό χρησιμοποιούνται προσεγγιστικές λύσεις οι οποίες επιτρέπουν την κατανόηση των φυσικών διεργασιών που εμπλέκονται στη δυναμική συμπεριφορά του αεροσκάφους χωρίς την απαίτηση τεράστιου υπολογιστικού χρόνου για την επίτευξη απόλυτης ακρίβειας.
Για παράδειγμα μια προσεγγιστική λύση της διαμήκους χαρακτηριστικής εξίσωσης (4.6) βασίζεται στο γεγονός ότι οι συντελεστές A, B, C, D και Ε έχουν σχετικές τιμές που δεν μεταβάλλονται σημαντικά, τουλάχιστον για τα συμβατικά αεροσκάφη, σύμφωνα με τον Cook [3]. Γενικά:
![]()
Έτσι, το χαρακτηριστικό πολυώνυμο παραγοντοποιείται κατά προσέγγιση ως ακολούθως:
|
|
|
(4.9) |
Η εξίσωση (4.9) αποτελεί στην πραγματικότητα το πρώτο βήμα στην κλασσική λύση του πολυώνυμου, με το πρώτο ζεύγος των μιγαδικών ριζών να περιγράφει το φυγοειδές και το δεύτερο να περιγράφει τη μικρή περίοδο. Οι αλγεβρικές εκφράσεις για τους συντελεστές A, B, C, D και Ε συναρτήσει των αεροδυναμικών παραγώγων, της αδράνειας και της μάζας δίνονται στο παράρτημα Γ.3.1. Δεδομένου ότι αυτές οι εκφράσεις είναι σχετικά πολύπλοκες δεν μπορούν να δώσουν ικανοποιητική περιγραφή των φυσικών διεργασιών που λαμβάνουν χώρα, εκτός και αν ακολουθήσει περαιτέρω απλοποίηση των μαθηματικών σχέσεων. Από την άλλη πλευρά η προσεγγιστική σχέση (4.9) είναι χρήσιμη για την προκαταρκτική εκτίμηση των μορφών ευστάθειας, ή ως τρόπος ελέγχου των λύσεων που λαμβάνονται από κάποιο υπολογιστικό σύστημα, ενώ τέλος, για συμβατικά αεροσκάφη οι προσεγγιστικές λύσεις είναι πολύ συχνά εξαιρετικά κοντά στις πραγματικές λύσεις που δίνει η χαρακτηριστική εξίσωση.
5.1. Η προσέγγιση της μικρής περιόδου
Τα βραχυπρόθεσμα χαρακτηριστικά απόκρισης ενός αεροσκάφους έχουν εξαιρετική σημασία για την εκτίμηση των ικανοτήτων του από πλευράς χαρακτηριστικών πτήσης και ευκολίας χειρισμού για τους λόγους που θα εκτεθούν σε επόμενο κεφάλαιο. Από τη στιγμή που η συμπεριφορά του αεροσκάφους στο βραχυπρόθεσμο διάστημα που ακολουθεί τη διαταραχή, κυριαρχείται από τη μορφή της μικρής περιόδου, μπορεί να χρησιμοποιηθεί η εξίσωση κίνησης μειωμένης τάξης όπου παραλείπονται οι μεταβλητές κατάστασης στις οποίες επιδρά το φυγοειδές. Παρατηρώντας λοιπόν τη φύση των ταλαντώσεων της μικρής περιόδου, είναι δυνατό να απλοποιηθούν οι διαμήκεις εξισώσεις κίνησης ώστε να περιγράφουν μόνο τη βραχυπρόθεσμη δυναμική.
Όπως έχει ήδη αναφερθεί, η ταλάντωση της μικρής περιόδου είναι σχεδόν αποκλειστικά μια ταλάντωση της οποίας οι κυρίαρχες μεταβλητές είναι ο ρυθμός πρόνευσης και η γωνία πρόσπτωσης ενώ η ταχύτητα U παραμένει ουσιαστικά σταθερή (u=0).Επομένως η εξίσωση της ταχύτητας αλλά και οι όροι που εξαρτώνται από την ταχύτητα μπορούν να παραλειφθούν από τις διαμήκεις εξισώσεις κίνησης (4.1), καθώς κατά τη βραχυπρόθεσμη κίνηση αυτοί οι όροι θα ισούνται με το μηδέν. Έτσι, μπορεί να γραφεί:
|
|
|
(4.10) |
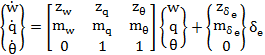
Εν συνεχεία υποθέτοντας ότι η εξίσωση κίνησης αναφέρεται στους άξονες του ανέμου και το αεροσκάφος είναι αρχικά σε μόνιμη-σταθερή και οριζόντια πτήση τότε:
|
|
|
(4.11) |
Ενώ όπως προκύπτει από τις συντετμημένες εκφράσεις των παραγώγων ευστάθειας που παρατίθενται στο ΠΑΡΑΡΤΗΜΑ Δ.2.1:
|
|
|
(4.12) |
Τότε η εξίσωση (4.10) μπορεί να απλοποιηθεί στη μορφή:
|
|
|
(4.13) |
όπου όμως τώρα οι παράγωγοι ευστάθειας αναφέρονται στο σύστημα του ανέμου. Η εξίσωση (4.13) είναι αρκετά απλή ώστε το μητρώο της συνάρτησης μεταφοράς να μπορεί να υπολογιστεί αναλυτικά με εφαρμογή της εξίσωσης (4.14):
|
|
|
(4.14) |

Η συνάρτηση μεταφοράς μπορεί να απλοποιηθεί περαιτέρω παρατηρώντας ότι:
|
|
|
(4.15) |
Από το παράρτημα Δ.2.1 προκύπτει:
|
|
|
(4.16) |
Έτσι, οι δύο βραχυπρόθεσμες συναρτήσεις μεταφοράς που περιγράφουν την απόκριση στην πηδάλιο ανόδου-καθόδου μπορούν να γραφούν ως:
|
|
|
(4.17) |
|
|
|
(4.18) |
Φυσικά σε αυτή την περίπτωση γίνεται πλήρως αποδεκτό ότι τα kw, kq, Tα, Τθ2, ζs και ωs αντιπροσωπεύουν προσεγγιστικά μεγέθη. Τώρα λοιπόν είναι πολύ πιο εύκολο να συσχετιστούν οι πιο σημαντικές παράμετροι που περιγράφουν τη διαμήκη βραχυπρόθεσμη μεταβατική δυναμική απόκριση του αεροσκάφους με τις αεροδυναμικές ιδιότητες του σκάφους (airframe), οι οποίες αντιπροσωπεύονται στις εξισώσεις (4.17) και (4.18) από τη συντετμημένη μορφή των παραγώγων ευστάθειας.
Πλέον η χαρακτηριστική εξίσωση μειωμένης τάξης προκύπτει:
|
|
|
(4.19) |
Σε αναλογία με την κλασσική διάταξη της μάζας-ελατηρίου-αποσβεστήρα, η απόσβεση και η φυσική συχνότητα της μικρής περιόδου δίνονται με ικανοποιητική ακρίβεια ως:
|
|
|
(4.20) |
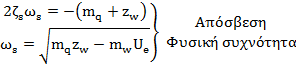
Τότε μπορεί να εκφραστεί η απόσβεση και η φυσική συχνότητα όπως περιγράφονται από την (4.20), αντικαθιστώντας τις εκφράσεις των συντετμημένων παραγώγων ως προς τις διαστατές παράγωγους ευστάθειας από το παράρτημα Δ.2.1, ενώ οι προηγούμενοι περιορισμοί εξακολουθούν να ισχύουν:
Παρατηρείται επίσης, ότι οι δεξιοί όροι των εξισώσεων (4.21) έχουν ως παρονομαστή είτε τη μάζα είτε τη ροπή αδράνειας πρόνευσης. Αυτοί οι όροι μπορούν να ερμηνευτούν ακριβώς με τον ίδιο τρόπο όπως στη κλασσική διάταξη μάζας-ελατηρίου-αποσβεστήρα. Ανάλογα οι αεροδυναμικές παράγωγοι ευστάθειας, περιγράφουν την ακαμψία του ελατηρίου και τη συνεκτική απόσβεση πρόνευσης αν και υπάρχουν περισσότεροι από ένας όροι που επηρεάζουν την απόσβεση και τη φυσική συχνότητα. Για τα περισσότερα συμβατικά αεροσκάφη, τα ολικά δυναμικά χαρακτηριστικά συνήθως περιγράφουν μια ευσταθή μορφή της μικρής περιόδου.
Για το τυπικό συμβατικό αεροσκάφος οι αριθμητικές τιμές των σχετικών αεροδυναμικών παραγώγων ευστάθειας είναι τέτοιες ώστε χονδρικά μπορεί να γραφτεί:
|
|
|
(4.22) |
Οι δύο αυτές προσεγγιστικές σχέσεις φανερώνουν τους κυρίαρχους
παράγοντες που καθορίζουν τα χαρακτηριστικά της μικρής περιόδου. Συνήθως η
παράγωγος ευστάθειας ![]() που
εξαρτάται από την κλίση της καμπύλης της άνωσης και η παράγωγος
που
εξαρτάται από την κλίση της καμπύλης της άνωσης και η παράγωγος ![]() που
κατά τον μεγαλύτερο βαθμό εξαρτάται από τις ιδιότητες απόσβεσης του ουραίου
πτερώματος (οριζόντιο και κάθετο ουραίο σταθερό πτερύγιο) είναι συνήθως και οι
δύο αρνητικοί αριθμοί. Η παράγωγος
που
κατά τον μεγαλύτερο βαθμό εξαρτάται από τις ιδιότητες απόσβεσης του ουραίου
πτερώματος (οριζόντιο και κάθετο ουραίο σταθερό πτερύγιο) είναι συνήθως και οι
δύο αρνητικοί αριθμοί. Η παράγωγος ![]() είναι
ένα μέτρο της αεροδυναμικής δυσκαμψίας πρόνευσης ενώ και αυτή κυριαρχείται από
την αεροδυναμική του ουραίου πτερώματος.
είναι
ένα μέτρο της αεροδυναμικής δυσκαμψίας πρόνευσης ενώ και αυτή κυριαρχείται από
την αεροδυναμική του ουραίου πτερώματος.
Το πρόσημο της ![]() εξαρτάται
από τη θέση του κέντρου βάρους και μάλιστα όσο αυτό κινείται προς τα εμπρός
στην άτρακτο, τόσο μεγαλύτερες αρνητικές τιμές παίρνει αυτή η παράγωγος.
Υπενθυμίζεται από το υποκεφάλαιο 2.4 του κεφαλαίου
2 περί ευστάθειας συναρτήσει του αδιάστατου συντελεστή ροπής:
εξαρτάται
από τη θέση του κέντρου βάρους και μάλιστα όσο αυτό κινείται προς τα εμπρός
στην άτρακτο, τόσο μεγαλύτερες αρνητικές τιμές παίρνει αυτή η παράγωγος.
Υπενθυμίζεται από το υποκεφάλαιο 2.4 του κεφαλαίου
2 περί ευστάθειας συναρτήσει του αδιάστατου συντελεστή ροπής:
|
|
|
(4.23) |
όπου
|
|
|
(4.24) |
|
|
|
(4.25) |
Έτσι, η μικρή περίοδος θα είναι ευσταθής εφόσον το κέντρο βάρους
βρίσκεται αρκετά μπροστά στο αεροσκάφος. Η θέση του κέντρου βάρους στην άτρακτο,
όπου η παράγωγος ![]() αλλάζει
πρόσημο, ονομάζεται ουδέτερο σημείο με τα χειριστήρια σταθεροποιημένα:
αλλάζει
πρόσημο, ονομάζεται ουδέτερο σημείο με τα χειριστήρια σταθεροποιημένα:
|
|
|
(4.26) |
Έτσι, η ![]() ,
αποτελεί επίσης ένα μέτρο του περιθωρίου ευστάθειας με τα χειριστήρια
σταθεροποιημένα που εκφράστηκε ως:
,
αποτελεί επίσης ένα μέτρο του περιθωρίου ευστάθειας με τα χειριστήρια
σταθεροποιημένα που εκφράστηκε ως:
|
|
|
(4.27) |
Σύμφωνα με τις σχέσεις (4.19), (4.20), η αντίστοιχη θέση του
κέντρου βάρους, όπου η έκφραση ![]() αλλάζει
πρόσημο, ονομάζεται σημείο ελιγμού με τα χειριστήρια
σταθεροποιημένα (controls fixed manoeuvre point) ενώ και αυτή η σχέση αποτελεί
αντίστοιχα ένα μέτρο του περιθωρίου ελιγμών με τα
χειριστήρια σταθεροποιημένα (controls fixed manoeuvre margin).
αλλάζει
πρόσημο, ονομάζεται σημείο ελιγμού με τα χειριστήρια
σταθεροποιημένα (controls fixed manoeuvre point) ενώ και αυτή η σχέση αποτελεί
αντίστοιχα ένα μέτρο του περιθωρίου ελιγμών με τα
χειριστήρια σταθεροποιημένα (controls fixed manoeuvre margin).
5.2. Η προσέγγιση του φυγοειδούς
Καθώς η ταλάντωση του φυγοειδούς έχει μεγάλη περίοδο, δηλαδή εξελίσσεται πολύ αργά, μπορεί να τη διαχειριστεί εύκολα ο πιλότος. Γι’ αυτό, σπάνια απαιτείται η ύπαρξη ενός μοντέλου μειωμένης τάξης που θα διατηρεί μόνο τη δυναμική του φυγοειδούς. Παρόλα αυτά, ένα τέτοιο μοντέλο χρησιμεύει στον προσδιορισμό των αεροδυναμικών ιδιοτήτων της κατασκευής που καθορίζουν τα σημαντικότερα χαρακτηριστικά του φυγοειδούς.
Η πρώτη επιτυχής ανάλυση της δυναμικής του φυγοειδούς, πραγματοποιήθηκε από τον Lanchester (1908), όπως αναφέρεται στο [6] που, χρησιμοποιώντας τις παρατηρήσεις του σε μοντέλα ανεμοπτέρων, υπολόγισε ένα μαθηματικό μοντέλο βασισμένο στην ανταλλαγή δυναμικής και κινητικής ενέργειας για να περιγράψει την κίνηση του φυγοειδούς. Η ανάλυση αυτή, η οποία μας δίνει πρόσβαση στη φυσική υπόσταση του φυγοειδούς, μπορεί να εφαρμοστεί στα σύγχρονα αεροσκάφη με την προϋπόθεση ότι θα επαναπροσδιοριστούν οι υποθέσεις που έκανε πρώτος ο Lanchester:
• Το αεροσκάφος αρχικά βρίσκεται σε μόνιμη-σταθερή οριζόντια πτήση.
• Η συνολική ενέργεια του αεροσκάφους παραμένει σταθερή.
• Η γωνία πρόσπτωσης α παραμένει σταθερή στην αρχική τιμή ισορροπίας.
• Η ώση Τ αντισταθμίζει την οπισθέλκουσα D.
• Η κίνηση είναι τόσο αργή, ώστε οι επιδράσεις του ρυθμού πρόνευσης q μπορούν να αμεληθούν.
Ένα πιο λεπτομερές προσεγγιστικό μαθηματικό μοντέλο του φυγοειδούς μπορεί να προκύψει από τις εξισώσεις κίνησης κάνοντας απλοποιήσεις που θα προκύψουν από αντίστοιχες υποθέσεις γύρω από τη φύση της κίνησης. Μετά λοιπόν από μια διαταραχή οι μεταβλητές w και q αποκρίνονται σε χρονική κλίμακα που σχετίζεται με τη μικρή περίοδο, έτσι είναι λογικό να υποτεθεί ότι οι w και q είναι ψευδοστατικές στη μακρύτερη χρονική κλίμακα, που σχετίζεται με το φυγοειδές, όπως αναφέρεται και στα [3], [6]. Επομένως:
|
|
|
(4.28) |
Για μια ακόμη φορά υποτίθεται ότι οι εξισώσεις κίνησης αναφέρονται στους άξονες του ανέμου και ότι αφού η διαταραχή λαμβάνει χώρα γύρω από τη μόνιμη και οριζόντια πτήση:
|
|
|
(4.29) |
Ενώ σύμφωνα με το παράρτημα Δ.2.1:
|
|
|
(4.30) |
Ακόμη, όπως και με το μοντέλο μειωμένης τάξης της μικρής περιόδου και σύμφωνα με το παράρτημα Δ.2.1:
|
|
|
(4.31) |
Επιπλέον συνήθης υπόθεση είναι ότι η αεροδυναμική παράγωγος ![]() είναι
πολύ μικρή ποσότητα. Έτσι, η εξίσωση κίνησης μπορεί να απλοποιηθεί ως εξής:
είναι
πολύ μικρή ποσότητα. Έτσι, η εξίσωση κίνησης μπορεί να απλοποιηθεί ως εξής:
|
|
|
(4.32) |
Η δεύτερη και η τρίτη γραμμή της εξίσωσης μπορεί να γραφτεί:
|
|
|
(4.33) |
Επιλύοντας αλγεβρικά λαμβάνονται οι εκφράσεις για τα w και q ως προς τα u και δe.
|
|
|
(4.34) |
Η έκφραση για τα w και q αντικαθίστανται στην πρώτη και στην τρίτη γραμμή της εξίσωσης (4.34) και μετά από την εκτέλεση των πράξεων προκύπτει η εξίσωση κατάστασης μειωμένης τάξης:
|
|
|
(4.35) |

Δηλαδή υπό τη μορφή:
|
|
|
(4.36) |
Η εξίσωση (4.35) μπορεί να λυθεί αλγεβρικά ώστε να μας δώσει την απόκριση της συνάρτησης μεταφοράς για τις μεταβλητές του φυγοειδούς u και θ. Όμως δεν είναι πολύ χρήσιμη η ανάλυση της μακροπρόθεσμης, δυναμικής απόκρισης ως προς το πηδάλιο ανόδου-καθόδου κατά αυτόν τον τρόπο. Η χαρακτηριστική εξίσωση που περιγράφει τη δυναμική μειωμένης τάξης του φυγοειδούς είναι πολύ πιο χρήσιμη και δίνεται από την:
|
|
|
(4.37) |
όπου
|
|
|
(4.38) |

Έτσι, η προσεγγιστική απόσβεση και φυσική συχνότητα του φυγοειδούς λαμβάνονται ως προς ένα περιορισμένο αριθμό αεροδυναμικών παραγώγων ευστάθειας. Προβαίνοντας σε κάποιες επιπλέον παραδοχές, μπορούν να ληφθούν κάποιες πιο χονδρικές αλλά και πιο περιεκτικές προσεγγίσεις ως προς τις αεροδυναμικές ιδιότητες που καθορίζουν τα χαρακτηριστικά του φυγοειδούς. Για ένα συμβατικό αεροσκάφος σε υποηχητική πτήση μπορεί να θεωρηθεί σύμφωνα με το [3], ότι:
|
|
|
(4.39) |
Στη συνέχεια οι αντίστοιχες εκφράσεις για την απόσβεση και τη φυσική συχνότητα γίνονται:
|
|
|
(4.40) |

Στη συνέχεια με βάση το παράρτημα
Δ.2.1 και επειδή η ![]() είναι
τόσο μικρή ώστε να μπορεί να παραληφθεί, ενώ ισχύει
είναι
τόσο μικρή ώστε να μπορεί να παραληφθεί, ενώ ισχύει ![]() :
:
|
|
|
(4.41) |
Αντίστοιχες εκφράσεις για τις αδιάστατες αεροδυναμικές παραγώγους, όπως ορίζονται στα [5], [6], [12], δίνονται στο παράρτημα Ε. Αυτές μπορούν να προσεγγιστούν όπως στη σχέση (4.42), όπου οι βασικές αεροδυναμικές ιδιότητες υποτίθεται ότι είναι ανεξάρτητες της ταχύτητας. Αυτό προκύπτει από την υπόθεση ότι οι επικρατούσες συνθήκες πτήσης είναι υποηχητικές και επομένως οι αεροδυναμικές ιδιότητες της ατράκτου δεν επηρεάζονται από τα φαινόμενα συμπιεστότητας.
|
|
|
(4.42) |
Οι εκφράσεις (4,40) μπορούν πλέον να ξαναγραφτούν ως προς τις αεροδυναμικές παραμέτρους υποθέτοντας ξανά ότι στην αντισταθμισμένη κατάσταση η άνωση είναι ίση με το βάρος του αεροσκάφους:
|
|
|
(4.43) |
Τότε η απλοποιημένη προσεγγιστική έκφραση για τον λόγο απόσβεσης είναι:
|
|
|
(4.44) |
Όπως είναι φυσικό, αυτές οι εκφράσεις για τον λόγο απόσβεσης και τη φυσική συχνότητα του φυγοειδούς είναι πολύ προσεγγιστικές αφού προκύπτουν βάσει πολλών παραδοχών. Σημειώνεται ότι η έκφραση για την ωp είναι η ίδια με αυτή που κατέληξε ο Lanchester, η οποία αποδεικνύει ότι η φυσική συχνότητα του φυγοειδούς είναι περίπου αντιστρόφως ανάλογη με την ταχύτητα αντιστάθμισης. Επίσης, πολύ ενδιαφέρουσα παρατήρηση είναι ότι ο λόγος απόσβεσης του φυγοειδούς είναι περίπου αντιστρόφως ανάλογος του λόγου άνωσης προς οπισθέλκουσα του αεροσκάφους. Από τη στιγμή που ένας από τους κύριους αντικειμενικούς σκοπούς του μηχανικού είναι να πετύχει μεγάλο λόγο άνωσης προς οπισθέλκουσα, γίνεται εύκολα κατανοητό για πιο λόγο η απόσβεση του φυγοειδούς είναι συνήθως πολύ χαμηλή.
Συνοπτικά για τα μοντέλα χαμηλότερης τάξεως προκύπτει ότι οι κυριότερες παράγωγοι ευστάθειας που εμπλέκονται είναι οι:
•
![]() :
απόσβεση μικρής περιόδου,
:
απόσβεση μικρής περιόδου,
•
![]() :
συχνότητα μικρής περιόδου,
:
συχνότητα μικρής περιόδου,
•
![]() :
απόσβεση φυγοειδούς,
:
απόσβεση φυγοειδούς,
•
![]() :
συχνότητα φυγοειδούς.
:
συχνότητα φυγοειδούς.
Βιβλιογραφία/Αναφορές
|
Michael V. Cook, Flight Dynamics Principles - A Linear Systems Approach to Aircraft Stability and Control, 2nd ed. Oxford, UK: Elsevier Ltd, 2007. |
|
|
Robert C. Nelson, Flight Stability and Automatic Control, 2nd ed. Singapore: WCB/McGraw-Hill, 1998. |
|
|
Bernard Etkin & Lloyd D. Reid, Dynamics of Flight: Stability and Control, 3rd ed. Toronto, Canada: John Wiley & Sons, Inc., 1996. |
|
|
Νικόλαος Ι. Κρικέλης, Εισαγωγή στον Αυτόματο Έλεγχο. Αθήνα, Ελλάδα: Συμμετρία, 1992. |
|
|
Νικόλαος Ι. Κρικέλης, Μοντελοποίηση & Βέλτιστος Έλεγχος Συστημάτων, 3η εκ. Αθήνα, Ελλάδα: Fountas Books, 2003. |
|
|
Robert K. Heffley & Wayne F. Jewell, "Aircraft Handling Qualities Data", NASA, Hawthorne CA, Contractor Report 1972. |
Παράδειγμα - Εφαρμογή
Παράδειγμα 4.1.
Ακολουθεί ένα παράδειγμα μελέτης της διαμήκους δυναμικής για το αεροσκάφος Boeing 747. Δίνονται παρακάτω οι συνθήκες πτήσης και τα δεδομένα μάζας (Παράρτημα Η.1, 3η περίπτωση), ενώ το αεροσκάφος εκτελεί οριζόντια σταθερή πτήση:
|
|
|
|
|
|
|
|
Οι τιμές των παραγώγων ευστάθειας σε αυτές τις συνθήκες, δίνονται ως προς το σωματόδετο σύστημα αξόνων του αεροσκάφους (3η περίπτωση). Η αρχή των αξόνων του σωματόδετου συστήματος (Oxbybzb) βρίσκεται στο κέντρο βάρος (CG). Ο άξονας Oxb κείται πάνω στον διαμήκη άξονα του αεροσκάφους FRL. Η γραμμή της ώσης (TL-Thrust Line) σχηματίζει γωνία 2.5° σε σχέση με την FRL.
|
|
|
|
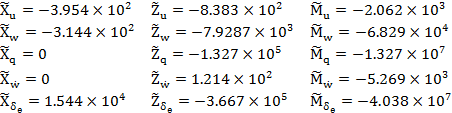
Γενικά, συνιστάται η επίλυση με τις εξισώσεις κίνησης και τα δεδομένα, στα συστήματα αξόνων στις μορφές και στις μονάδες που αυτά δίνονται από την εφαρμογή, διαφορετικά μπορεί να προκύψουν εύκολα πολλά λάθη στους υπολογισμούς. Στο παράδειγμα αυτό, διατηρούνται οι μονάδες του Αμερικανικού συστήματος μετρήσεων (American Imperial Units). Για τη μετατροπή από αυτό το σύστημα στο σύστημα SI, υπάρχουν διαθέσιμοι πίνακες μετατροπής των μονάδων στο παράρτημα Ζ. Από τη στιγμή που η γωνία πρόσπτωσης είναι μηδενική (αe=0) και το αεροσκάφος δεν πλαγιολισθαίνει, το σωματόδετο σύστημα, ταυτίζεται με το αεροδυναμικό και δεν απαιτείται μετασχηματισμός των δεδομένων.
Στη συνέχεια εξετάζεται η επίλυση του συστήματος των εξισώσεων κίνησης του Β-747 στον χώρο κατάστασης, που έχει την εξής μορφή:
|
|
|
(Π4.1) |
|
|
|
(Π4.2) |
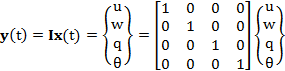
Οι τιμές των συντετμημένων παραγώγων του πίνακα Α, προκύπτουν από τις σχέσεις που δίνονται στο παράρτημα Δ.2.1 συναρτήσει των διαστατών παραγώγων ευστάθειας. Τότε το σύστημα γίνεται:
|
|
|
(Π4.3) |
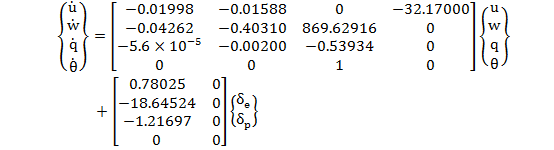
4.1.1. Ιδιοδιανυσματική ανάλυση
Το περιεχόμενο της κάθε μορφής για κάθε μεταβλητή κίνησης, δίνεται με μεγαλύτερη ακρίβεια από τα ιδιοδιανύσματα. Μέσω κάποιου υπολογιστικού πακέτου όπως το Matlab, μπορεί να υπολογιστεί αριθμητικά ο διαγώνιος πίνακας των ιδιοτιμών Λ:
|
|
|
(Π4.4) |
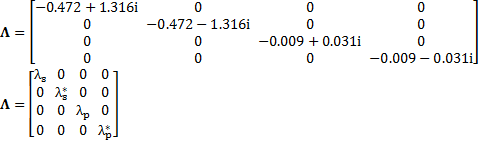
ενώ ο πίνακας των ιδιοδιανυσμάτων V προκύπτει:
|
|
|
(Π4.5) |

Οι λs και λp, καθώς και οι συζυγείς τους λp* και λs* είναι οι ιδιοτιμές που σχετίζονται με την ταλάντωση πρόνευσης της μικρής περιόδου και του φυγοειδούς αντίστοιχα.
Επίσης, κατασκευάζεται ο πίνακας των μέτρων των ιδιοδιανυσμάτων ως εξής:
|
|
|
(Π4.6) |

Διαπιστώνεται ότι η κυρίαρχη μορφή στη μεταβλητή u είναι το φυγοειδές αφού 0.99933>>0.03613. H μικρή περίοδος κυριαρχεί στην κάθετη ταχύτητα w αφού 0.99935>>0.03639, όμοια και στην q αφού 0.00152>>0.00003 ενώ η μικρή περίοδος και το φυγοειδές έχουν ισορροπημένη συμμετοχή στη θ. Τα ίδια συμπεράσματα προκύπτουν παρατηρώντας τις αποκρίσεις στο σχήμα Π4.1.
Ο εκθετικός πίνακας ορίζεται ως:
|
|
|
(Π4.7) |

Το μητρώο των ιδιοσυναρτήσεων ![]() επομένως
έχει μιγαδικά μη μηδενικά στοιχεία και κάθε γραμμή περιγράφει το δυναμικό
περιεχόμενο της μεταβλητής κατάστασης με την οποία σχετίζεται. Για παράδειγμα η
πρώτη γραμμή περιγράφει το δυναμικό περιεχόμενο της διαταραχής ταχύτητας u και
αποτελείται από τα ακόλουθα τέσσερα στοιχεία:
επομένως
έχει μιγαδικά μη μηδενικά στοιχεία και κάθε γραμμή περιγράφει το δυναμικό
περιεχόμενο της μεταβλητής κατάστασης με την οποία σχετίζεται. Για παράδειγμα η
πρώτη γραμμή περιγράφει το δυναμικό περιεχόμενο της διαταραχής ταχύτητας u και
αποτελείται από τα ακόλουθα τέσσερα στοιχεία:
|
|
|
(Π4.8) |

Τα πρώτα δύο στοιχεία περιγράφουν την ταλάντωση μικρής περιόδου ως προς την πρόνευση σε μια διαταραχή της ταχύτητας και τα επόμενα δύο περιγράφουν το φυγοειδές. Παρατηρείται ότι τα μέτρα των ιδιοδιανυσμάτων (δηλ. οι όροι στις παρενθέσεις) που σχετίζονται με το φυγοειδές είναι τα μεγαλύτερα και επομένως η δυναμική του φυγοειδούς είναι αυτή που κυριαρχεί στη διαταραχή ταχύτητας. Από την άλλη πλευρά η ταλάντωση της μικρής περιόδου ως προς την πρόνευση μόλις που είναι ορατή. Προφανώς αυτή η παρατήρηση μπορεί να γίνει για όλες τις μεταβλητές κατάστασης με απλή εξέταση των μητρώων των ιδιοδιανυσμάτων και των ιδιοτιμών. Αυτή η ιδιότητα μας εξυπηρετεί ιδιαίτερα για τη μελέτη της απόκρισης του αεροσκάφους ειδικά όταν οι τύποι της ευστάθειας είναι συγκεχυμένοι ή όταν υφίσταται κάποιας μορφής σύζευξη των μορφών ευστάθειας.
4.1.2. Επαύξηση μοντέλου - Απόκριση στο πηδάλιο ανόδου-καθόδου
Όπως είναι γνωστό ο λόγος απόσβεσης και η φυσική συχνότητα χωρίς απόσβεση (πληροφορίες που περιλαμβάνονται στις ιδιοτιμές) χαρακτηρίζουν τις μορφές της ευστάθειας
Για την εκτίμηση των χαρακτηριστικών ευκολίας χειρισμού (handling qualities)
είναι πολύ χρήσιμος ο προσδιορισμός των μεταβλητών της γωνίας πρόσπτωσης α και
της γωνίας του ίχνους πτήσης γ. Η μέθοδος του χώρου κατάστασης παρέχει τη
δυνατότητα της άμεσης εισαγωγής επιπλέον μεταβλητών στο σύστημα με τη μέθοδο
της επαύξησης του μοντέλου κατάστασης. Για κίνηση μικρών διαταραχών, όπου ![]() όταν
η διαταραχή τείνει στο μηδέν, η γωνία πρόσπτωσης όπως προκύπτει από τις σχέσεις
(3.29)-(3.33):
όταν
η διαταραχή τείνει στο μηδέν, η γωνία πρόσπτωσης όπως προκύπτει από τις σχέσεις
(3.29)-(3.33):
|
|
|
(Π4.9) |
Η γωνία πρόσπτωσης μπορεί να συμπεριληφθεί στη διαμήκη εξίσωση
κατάστασης με δύο τρόπους. Είτε η γωνία μπορεί να προστεθεί στο διάνυσμα εξόδου
![]() χωρίς
αλλαγή του διανύσματος κατάστασης
χωρίς
αλλαγή του διανύσματος κατάστασης ![]() ,
είτε μπορεί να αντικαταστήσει την κάθετη ταχύτητα w στο διάνυσμα κατάστασης.
Όταν η εξίσωση εξόδου επαυξάνεται (1η περίπτωση) η (Π4.2) γίνεται:
,
είτε μπορεί να αντικαταστήσει την κάθετη ταχύτητα w στο διάνυσμα κατάστασης.
Όταν η εξίσωση εξόδου επαυξάνεται (1η περίπτωση) η (Π4.2) γίνεται:
|
|
|
(Π4.10) |
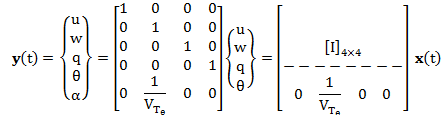
Η γωνία του ίχνους πτήσης γ μπορεί να αποδειχθεί ότι δίνεται από τη σχέση:
|
|
|
(Π4.11) |
Τότε η εξίσωση εξόδου γίνεται:
|
|
|
(Π4.12) |
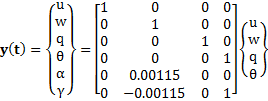
Ο κοινός πολυωνυμικός παρονομαστής (χαρακτηριστικό πολυώνυμο) των ΣΜ προκύπτει ως:
|
|
|
(Π4.13) |
Τα πολυώνυμα των αριθμητών των ΣΜ, προκύπτουν ως:
|
|
|
(Π4.14) |
|
|
|
(Π4.15) |
|
|
|
(Π4.16) |
|
|
|
(Π4.17) |
|
|
|
(Π4.18) |
|
|
|
(Π4.19) |
Το πρώτο ζεύγος των μιγαδικών ριζών περιγράφει την ταλάντωση πρόνευσης της μικρής περιόδου με χαρακτηριστικά:
|
|
|
|
Το δεύτερο ζεύγος των μιγαδικών ριζών περιγράφει τη φυγοειδή ταλάντωση με χαρακτηριστικά:
|
|
|
|
Αυτά τα χαρακτηριστικά μας αποκαλύπτουν ότι αναφερόμαστε σε ένα
αεροδυναμικά ευσταθές αεροσκάφος. Αργότερα θα αναλυθεί γιατί ο λόγος απόσβεσης
της μικρής περιόδου είναι χαμηλός. Η απόκριση του αεροσκάφους σε είσοδο
βαθμίδας στο πηδάλιο ανόδου καθόδου (![]() )
φαίνεται στο σχήμα Π4.1, όπου απεικονίζονται όλες οι μεταβλητές των εξισώσεων
κίνησης.
)
φαίνεται στο σχήμα Π4.1, όπου απεικονίζονται όλες οι μεταβλητές των εξισώσεων
κίνησης.
Οι αποκρίσεις που παρουσιάζονται στο σχήμα Π4.1, όπως προκύπτουν από το επαυξημένο μοντέλο, δείχνουν καθαρά και τις δύο μορφές της δυναμικής ευστάθειας, το φυγοειδές και τη μικρή περίοδο. Η σημασία (magnitude) της κάθε μορφής ευστάθειας ως προς κάθε μεταβλητή διαφέρει. Για παράδειγμα η ταλάντωση μικρής περιόδου είναι περισσότερο ορατή στο αρχικό μέρος των αποκρίσεων (initial transient) στις μεταβλητές w, q και α, ενώ το φυγοειδές είναι ορατό σε όλες τις μεταβλητές, αν και το σχετικό του μέγεθος διαφέρει αρκετά. Παρατηρείται ότι η ευστάθεια των αποκρίσεων είναι όμοια και ορίζεται όπως προαναφέρθηκε από τον κοινό παρονομαστή των συναρτήσεων μεταφοράς, αλλά οι διαφορές κάθε μιας από τις μεταβλητές απόκρισης που φαίνονται καθορίζονται από τους αριθμητές κάθε συνάρτησης μεταφοράς.
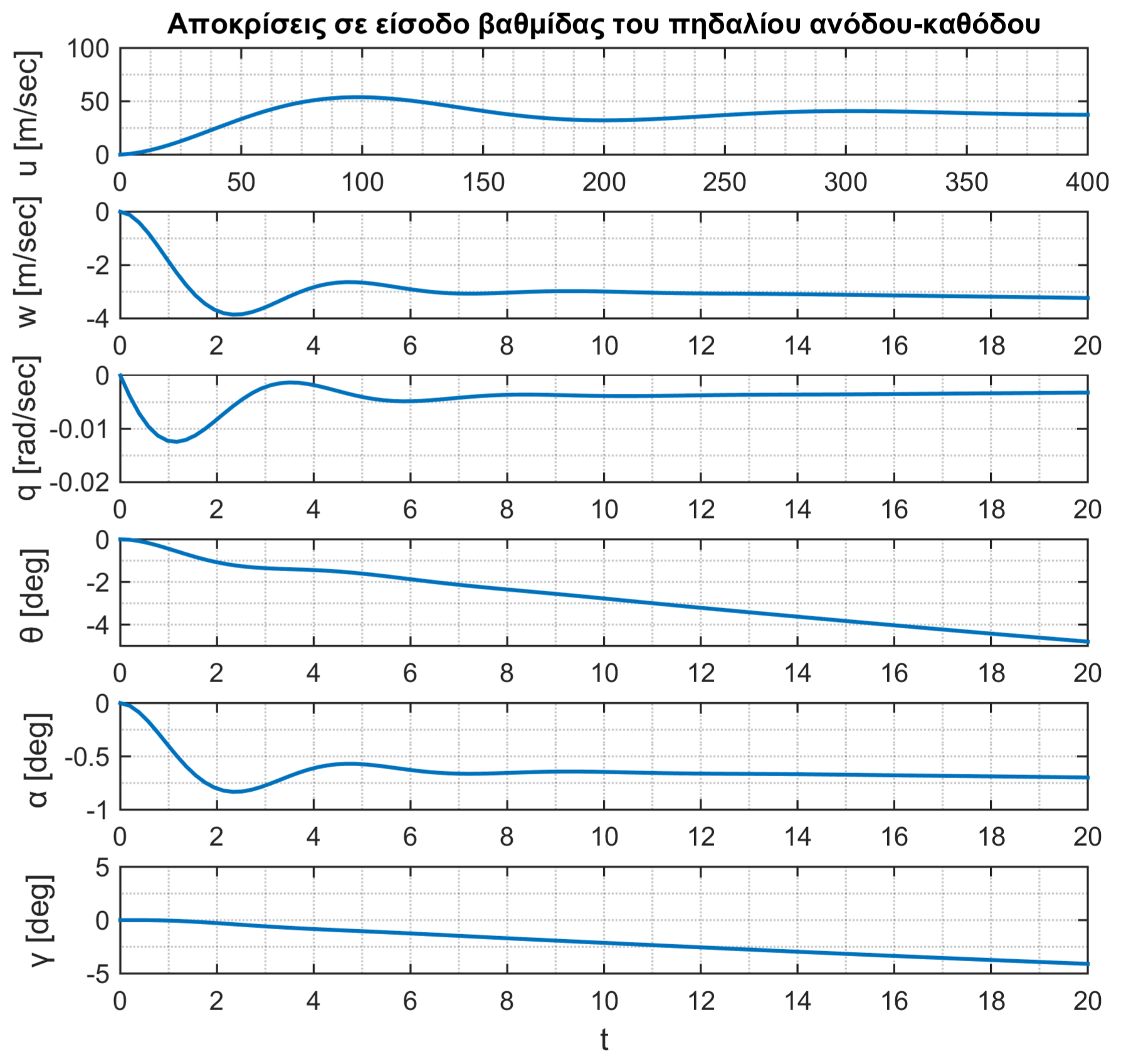
Σχήμα Π4.1 Απόκριση του αεροσκάφους σε είσοδο βαθμίδας του πηδαλίου ανόδου-καθόδου
Να σημειωθεί εδώ, ότι στα διάφορα λογισμικά που μπορούν να χρησιμοποιηθούν, και συγκεκριμένα στο Matlab, η χρήση της έτοιμης συνάρτησης ‘step()’ για τη λήψη των αποκρίσεων σε είσοδο βαθμίδας αντιστοιχεί σε είσοδο 1 rad και όχι 1°. Για διέγερση 1°, οι συναρτήσεις μεταφοράς πρέπει να πολλαπλασιαστούν με π/180=1/57,3.
|
|
|
(Π4.20) |
Επίσης, κατά την κατάστρωση του χώρου κατάστασης λαμβάνονται μηδενικές αρχικές συνθήκες, που σημαίνει ότι οι αποκρίσεις που προκύπτουν, αντιστοιχούν στις διαταραχές από την αρχική κατάσταση.
Με εφαρμογή του θεωρήματος τελικής τιμής προσδιορίζονται οι τιμές μόνιμης κατάστασης των μεταβλητών μετά από τη διέγερση. Έτσι, για παράδειγμα ο μετασχηματισμός Laplace της απόκρισης της ταχύτητας σε 1° μετατόπιση του πηδαλίου ανόδου-καθόδου γίνεται :
|
|
|
(Π4.21) |
|
|
|
(Π4.22) |
Εφαρμόζοντας το θεώρημα τελικής τιμής:
|
|
|
(Π4.23) |

Όπως προαναφέρθηκε, επειδή η είσοδος είναι θετική κατά την έννοια της πτώσης της κεφαλής του αεροσκάφους, η απόκρισή του καταλήγει σε μια μικρή και σταθερή αύξηση της ταχύτητας. Με παρόμοιο τρόπο προκύπτουν οι αποκρίσεις μόνιμης κατάστασης όλων των μεταβλητών κίνησης:
|
|
|
(Π4.24) |
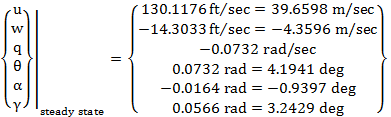
Παρόλο που η αρχική απόκριση παρουσιάζεται κατά την έννοια της πτώσης της κεφαλής του αεροσκάφους, παρατηρώντας τις αποκρίσεις μόνιμης κατάστασης, γίνεται αντιληπτό ότι μετά την αρχική, μεταβατική απόκριση το αεροσκάφος διατηρεί μια ελαττωμένη γωνία πρόσπτωσης, αυξημένη στάση πρόνευσης και πετά σε ένα ίχνος ανόδου με γωνία γss = 3.2429°.
4.1.3. Μοντέλα μειωμένης τάξης
Στη συνέχεια εφαρμόζεται το μοντέλο μειωμένης τάξης που αντιστοιχεί στην προσέγγιση της μικρής περιόδου όπως δίνεται από την εξίσωση (4.13):
|
|
|
(Π4.25) |
Ενώ υπενθυμίζεται από την (Π4.9):
|
|
|
|
Η επίλυση των εξισώσεων κίνησης (Π4.25) μας δίνει τις ακόλουθες συναρτήσεις μεταφοράς:
|
|
|
(Π4.26) |
|
|
|
(Π4.27) |
Η συνάρτηση μεταφοράς που περιγράφει τη βραχυπρόθεσμη απόκριση της πρόνευσης στη προσέγγιση της μικρής περιόδου, προκύπτει άμεσα από τη συνάρτηση μεταφοράς της γωνιακής ταχύτητας q:
|
|
|
(Π4.28) |
Εφαρμόζοντας το θεώρημα τελικής τιμής στη συνάρτηση του ρυθμού πρόνευσης q, με την εφαρμογή μοναδιαίας θετικής εισόδου βαθμίδας στο πηδάλιο ανόδου- καθόδου, προκύπτει:
|
|
|
(Π4.29) |
Το αποτέλεσμα υποδεικνύει ότι η κεφαλή του αεροσκάφους θα έχει ανοδική πορεία έως ότου η διέγερση από τα πηδάλια ανόδου-καθόδου σταματήσει. Αυτό επιβεβαιώνεται και από τη συνάρτηση μεταφοράς της πρόνευσης, δεδομένου ότι, μετά από τη χρονική στιγμή όπου αποσβένεται πλήρως η μικρή περίοδος, το αεροσκάφος συμπεριφέρεται ως ένας ιδανικός ολοκληρωτής ως προς την πρόνευση. Αυτό δεικνύεται από την παρουσία του παράγοντα s στον παρονομαστή της εξίσωσης (Π4.28). Στην πραγματικότητα η δυναμική του φυγοειδούς συνήθως εμποδίζει την εξέλιξη αυτής της κατάστασης εκτός και αν η είσοδος είναι πολύ μεγάλη και επιπλέον συνοδεύεται από αύξηση της ώσης στο αεροσκάφος, οπότε και καταλήγει στην πραγματοποίηση του ελιγμού στροφής στο κατακόρυφο επίπεδο. Φυσικά το μαθηματικό μοντέλο που αναλύεται εδώ είναι τελείως ακατάλληλο για την ανάλυση μιας κίνησης τέτοιου μεγάλου εύρους.
Από το χαρακτηριστικό πολυώνυμο του προσεγγιστικού μοντέλου μειωμένης τάξης της μικρής περιόδου προκύπτουν οι προσεγγιστικές τιμές του λόγου απόσβεσης και της φυσικής συχνότητας χωρίς απόσβεση της μικρής περιόδου:
|
|
|
(Π4.30) |
Ενώ είναι προφανές ότι αυτές οι τιμές συγκρίνονται πολύ ικανοποιητικά με τις ακριβείς τιμές όπως προέκυψαν από το πλήρες μοντέλο. Παρατηρώντας τη βραχυπρόθεσμη απόκριση του μοντέλου μειωμένης τάξης για τις μεταβολές του πηδαλίου ανόδου-καθόδου γίνεται πιο κατανοητό το φαινόμενο.
Στο σχήμα Π4.2 φαίνεται η απόκριση στη μοναδιαία είσοδο βαθμίδας του πηδαλίου ανόδου-καθόδου των εμπλεκόμενων μεταβλητών. Στην ίδια εικόνα φαίνονται και οι αντίστοιχες αποκρίσεις του πλήρους μοντέλου όπως προέκυψαν προηγουμένως.
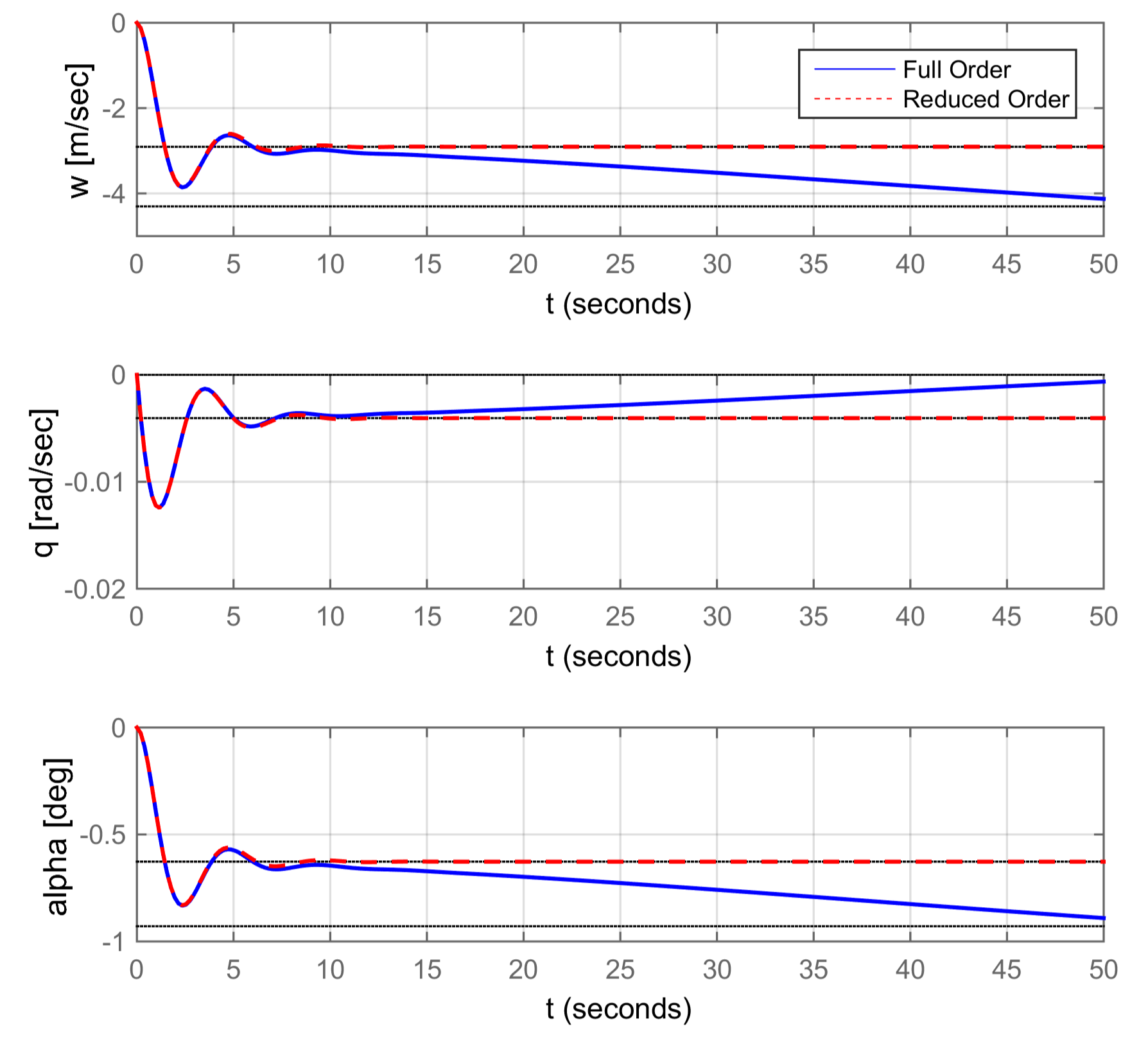
Σχήμα Π4.2. Αποκρίσεις μοντέλου μειωμένης τάξης της μικρής περιόδου-σύγκριση με το πλήρες μοντέλο
Είναι φανερό ότι οι αποκρίσεις αποκλίνουν με την πάροδο του χρόνου, όπως ήταν αναμενόμενο, καθώς στο μοντέλο μειωμένης τάξης δεν συμμετέχει η δυναμική του φυγοειδούς. Παρόλα αυτά, για τα περίπου πρώτα δέκα δευτερόλεπτα, η σύγκριση των δύο μοντέλων μας οδηγεί στο συμπέρασμα ότι το μοντέλο μειωμένης τάξης είναι αποδεκτό για τη μελέτη της βραχυπρόθεσμης απόκρισης.
Για την εφαρμογή του μοντέλου ελαττωμένης τάξης του φυγοειδούς, όπως αναλύθηκε στην αντίστοιχη παράγραφο, η εξίσωση κατάστασης που αναφέρεται στους άξονες του ανέμου είναι :
|
|
|
(Π4.31) |

Για τη σύγκριση με τα αποτελέσματα του παραδείγματος 4.1., απλά θα χρησιμοποιηθούν οι προσεγγιστικές σχέσεις που προέκυψαν από την ανάλυση για τα χαρακτηριστικά του φυγοειδούς:
|
|
|
(Π4.32) |
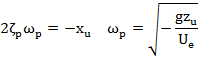
Άρα λαμβάνοντας τις τιμές των απαραίτητων παραγώγων από τα δεδομένα του αεροσκάφους:

Εφόσον γίνεται αναφορά σε υποηχητική πτήση, η παράγωγος mu είναι μικρή ως αναμενόμενο, γεγονός που συμβαδίζει με το μοντέλο. Τα προσεγγιστικά χαρακτηριστικά αυτού του μοντέλου θα είναι:
|
|
|
Και πάλι συγκρίνοντας αυτές τις τιμές με τις ακριβείς τιμές του πλήρους μοντέλου παρατηρείται ότι είναι παραπλήσιες. Επειδή ο λόγος απόσβεσης είναι πάντοτε μικρός (σχεδόν μηδενικός) είναι πολύ ευαίσθητος στα λάθη στρογγυλοποίησης και στις υποθέσεις που έχουν γίνει για την εκτίμησή του κάτι που καθιστά δύσκολο τον ακριβή υπολογισμό του. Στο παράδειγμά μας η προσέγγιση είναι αρκετά ακριβής διότι όπως και προηγουμένως η ταχύτητα του αεροσκάφους είναι υποηχητική κάτι που ταιριάζει σε ικανοποιητικό βαθμό με τις υποθέσεις που έγιναν κατά την κατάστρωση αυτού του μαθηματικού μοντέλου.
4.1.4. Απόκριση Συχνότητας
Για την εκτίμηση της διαμήκους απόκρισης του αεροσκάφους Β-747 στο πεδίο της συχνότητας για τις ίδιες συνθήκες πτήσης, χρησιμοποιούνται οι συναρτήσεις μεταφοράς όπως προκύπτουν από το χαρακτηριστικό πολυώνυμο (Π4.13) και τους αριθμητές (Π4.14)-(Π4.19). Στο σχήμα Π4.3, παρουσιάζονται τα αντίστοιχα διαγράμματα Bode.
Σχήμα Π4.3 Διαγράμματα Bode της διαταραχής της ταχύτητας
Όπως αναλύεται και στο παράρτημα Β.2.4., τα διαγράμματα Bode παρουσιάζουν την απόκριση μόνιμης κατάστασης t → ∞ ενός συστήματος το οποίο έχει ημιτονοειδή είσοδο σταθερού εύρους και της οποίας η συχνότητα μπορεί να μεταβάλλεται σε κάποια περιοχή.
Γενικά μπορεί να σχολιαστεί ότι:
• Για χαμηλή απόσβεση η καμπύλη του κέρδους παρουσιάζει απότομο μέγιστο στη συχνότητα θλάσης. Εφόσον, όπως προέκυψε και από την ιδιοδιανυσματική ανάλυση, η μορφή της μικρής περιόδου, η οποία κυριαρχεί στις αποκρίσεις των w (άρα και της α) και q, έχει σχετικά χαμηλό λόγο απόσβεσης. Αυτό επιβεβαιώνεται από το ελαφρό μέγιστο που παρουσιάζεται στη συχνότητά της, στην καμπύλη κέρδους της γωνίας πρόσπτωσης.
• Όσον αφορά την καμπύλη της φάσης, όταν η απόσβεση είναι χαμηλή, παρουσιάζεται έντονη κλίση στην περιοχή της συχνότητας θλάσης η οποία αποτελεί και σημείο καμπής. Αυτό παρατηρείται και στα τρία διαγράμματα φάσης και κυρίως στη συχνότητα της μικρής περιόδου.
• Όταν ένα ζεύγος μιγαδικών πόλων ή μηδενιστών βρίσκεται κοντά στον φανταστικό άξονα παρουσιάζεται χαρακτηριστικό μέγιστο ή ελάχιστο στην καμπύλη του κέρδους με έντονη κλίση της καμπύλης φάσης στη συχνότητα θλάσης. Παρατηρώντας τις συναρτήσεις μεταφοράς και τα διαγράμματα, αυτό επιβεβαιώνεται και για τις τρεις μεταβλητές u, w, q.
• Μηδενιστής στο δεξί μιγαδικό ημιεπίπεδο, συνεπάγεται ελάχιστο στην καμπύλη του κέρδους και μείωση της φάσης κατά ≈180°. Κάτι τέτοιο δεν είναι εμφανές στα διαγράμματα Π4.3 και επιβεβαιώνεται παρατηρώντας τις αντίστοιχες ΣΜ.
• Το κέρδος είναι ανάλογο της ευαισθησίας της απόκρισης στην εντολή εισόδου. Η πιο ευαίσθητη μεταβλητή είναι σαφώς η ταχύτητα u. Το αρνητικό κέρδος σε μια περιοχή συχνοτήτων που παρατηρείται στο διάγραμμα της γωνίας πρόσπτωσης, σημαίνει ότι αλλάζει το πρόσημο της απόκρισης.
5: ΕΓΚΑΡΣΙΑ ΔΥΝΑΜΙΚΗ
Σύνοψη
Το κεφάλαιο πραγματεύεται την ανάλυση της εγκάρσιας δυναμικής και τα μοντέλα χαμηλότερης τάξης με τα οποία μπορεί να προσεγγιστεί. Η ανάλυση που πραγματοποιείται είναι αντίστοιχη με το προηγούμενο κεφάλαιο 4 της διαμήκους δυναμικής. Επίσης, παρουσιάζονται εφαρμογές εξαγωγής των αποκρίσεων στα πεδία του χρόνου και της συχνότητας των μεγεθών που εμπλέκονται στην εγκάρσια δυναμική.
Προαπαιτούμενη γνώση
Πέρα από το υπόβαθρο που χρησιμοποιήθηκε και στο προηγούμενο κεφάλαιο, απαιτείται μια γενική εικόνα των συναρτήσεων μεταφοράς της εγκάρσιας-διεύθυνσης δυναμικής, από το ΠΑΡΑΡΤΗΜΑ Δ.3.
1. Απόκριση σε εντολές ελέγχου
Με την ίδια λογική όπως στη διαμήκη ανάλυση εξετάζεται και ο έλεγχος της εγκάρσιας δυναμικής και της δυναμικής διεύθυνσης του αεροσκάφους. Μόνο οι περιπτώσεις που διαφέρουν σημαντικά, θα παρουσιασθούν εδώ εκτεταμένα. Μέσω των μεθόδων που παρουσιάζονται αναλυτικά στο Παράρτημα Β, εξάγονται οι συναρτήσεις μεταφοράς της εγκάρσιας-διεύθυνσης δυναμικής, οι οποίες προκύπτουν από τις αντίστοιχες εξισώσεις κίνησης.
Οι εξισώσεις κίνησης περιγράφουν πλήρως τη γραμμική, ασύμμετρη, δυναμική απόκριση της πλαγιολίσθησης, της περιστροφής (κλίσης) και της εκτροπής, ως προς τις εντολές εισόδου στα πηδάλια κλίσης και εκτροπής. Όπως και στις λύσεις που προκύπτουν στη διαμήκη δυναμική, οι δυναμικές ιδιότητες που καθορίζονται από τα χαρακτηριστικά ευστάθειας της εγκάρσιας-διεύθυνσης δυναμικής του αεροσκάφους εμφανίζονται στην απόκριση των εμπλεκόμενων μεταβλητών κατάστασης του αεροσκάφους. Υπενθυμίζεται ότι η μοντελοποίηση και κατάστρωση των εξισώσεων, έγινε υπό την παραδοχή μικρών διαταραχών γύρω από μια κατάσταση ισορροπίας και οι συναρτήσεις μεταφοράς είναι γραμμικές. Η κατάσταση ισορροπίας αντιστοιχεί σε μόνιμη-σταθερή και οριζόντια πτήση. Δηλαδή όπως και στην ανάλυση της διαμήκους δυναμικής:
|
|
|
(5.1) |
Όπως παρουσιάζονται στο Παράρτημα Γ.3.2, από την επίλυση των εξισώσεων κίνησης προκύπτουν δύο ομάδες συναρτήσεων μεταφοράς που εκφράζουν τη σχέση των μεταβλητών κατάστασης ως προς τα δύο πιθανά σήματα εισόδου. Η πιο σημαντική διαφορά, σχετίζεται με το γεγονός ότι γενικά οι μορφές ευστάθειας της εγκάρσιας-διεύθυνσης δυναμικής τείνουν να μην είναι τόσο ευδιάκριτες, εφόσον υφίσταται δυναμική σύζευξη σε μεγαλύτερο βαθμό από ότι στη διαμήκη ανάλυση. Αυτό συνεπάγεται περισσότερη προσοχή στην επιλογή των υποθέσεων που εισάγονται για την απλοποίηση της ανάλυσής τους. Αντίθετα με τη διαμήκη δυναμική, ένα μεγάλο πλεονέκτημα είναι ότι η εγκάρσια-διεύθυνσης δυναμική δεν μεταβάλλεται σημαντικά σε σχέση με τις συνθήκες πτήσης, λόγω της γεωμετρικής, άρα και αεροδυναμικής συμμετρίας ως προς το εγκάρσιο επίπεδο Oxz των πλείστων αεροσκαφών από την αρχική τους σχεδίαση.
Οι εγκάρσιες-διεύθυνσης εξισώσεις κίνησης των μικρών διαταραχών γύρω από μια κατάσταση ισορροπίας που αναφέρονται στους άξονες του ανέμου (Θe ≡ αe = 0) δίνονται από την εξίσωση (5.2):
|
|
|
(5.2) |
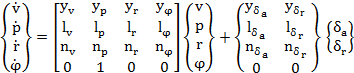
Η λύση της εξίσωσης αυτής μας δίνει δύο σετ από συναρτήσεις μεταφοράς. Ως προς τα πηδάλια κλίσεως:
Και αντίστοιχα οι συναρτήσεις μεταφοράς που περιγράφουν την απόκριση ως προς το πηδάλιο διεύθυνσης:
|
|
|
(5.7) |
|
|
|
(5.8) |
|
|
|
(5.9) |
|
|
|
(5.10) |
Η πολυωνυμική έκφραση του αριθμητή και του κοινού παρονομαστή προκύπτει όπως περιγράφεται στο Παράρτημα Γ.3.2. Τα πολυώνυμα παραγοντοποιούνται σε πραγματικές ρίζες και ζεύγη μιγαδικών ριζών. Οι ρίζες ερμηνεύονται ως χρονικές σταθερές, λόγοι απόσβεσης και φυσικές συχνότητες οπότε οι σχετικές πληροφορίες λαμβάνονται άμεσα από τις πιο πάνω εξισώσεις. Πρέπει επίσης να σημειωθεί, ότι οι όροι του αριθμητή και του παρονομαστή αποτελούν την τυπική μορφή που συναντάται στα περισσότερα συμβατικά αεροσκάφη.
Παρατηρείται ότι η σημειολογία, όπως χρησιμοποιείται στο [3], αποκαλύπτει παρόμοιες τιμές για κάποιους αριθμητές τόσο
στις συναρτήσεις μεταφοράς των πηδαλίων κλίσεως όσο και σε εκείνες του πηδαλίου
διεύθυνσης, για παράδειγμα οι όροι kr ,Tψ ,ζψ
και ωψ εμφανίζονται τόσο στην ![]() όσο
και στην
όσο
και στην ![]() .
Πρέπει να γίνει κατανοητό ότι οι αριθμητές εξαρτώνται από την εξίσωση στην
οποία γίνεται αναφορά, ενώ συνήθως έχουν αριθμητικές τιμές που είναι μοναδικά
σχετιζόμενες με τις αντίστοιχες συναρτήσεις μεταφοράς. Έτσι, αυτή η σημειολογία
χρησιμεύει μόνο στον καθορισμό του ρόλου κάθε όρου ως κέρδος, χρονική σταθερά,
λόγο απόσβεσης ή συχνότητα.
.
Πρέπει να γίνει κατανοητό ότι οι αριθμητές εξαρτώνται από την εξίσωση στην
οποία γίνεται αναφορά, ενώ συνήθως έχουν αριθμητικές τιμές που είναι μοναδικά
σχετιζόμενες με τις αντίστοιχες συναρτήσεις μεταφοράς. Έτσι, αυτή η σημειολογία
χρησιμεύει μόνο στον καθορισμό του ρόλου κάθε όρου ως κέρδος, χρονική σταθερά,
λόγο απόσβεσης ή συχνότητα.
Όπως και προηγουμένως ο παρονομαστής που είναι κοινός σε όλες τις συναρτήσεις μεταφοράς, είναι το χαρακτηριστικό πολυώνυμο το οποίο περιγράφει τα εγκάρσια-διεύθυνσης χαρακτηριστικά ευστάθειας του αεροσκάφους. Έτσι, η απόκριση όλων των μεταβλητών ως προς τα πηδάλια κλίσης ή διεύθυνσης καθορίζεται από τους όρους του παρονομαστή, δηλαδή τη χρονική σταθερά, τον λόγο απόσβεσης και τη φυσική συχνότητα. Οι διαφορές ανάμεσα σε κάθε μια από τις αποκρίσεις οφείλονται αποκλειστικά στους αντίστοιχους αριθμητές, όπως προαναφέρθηκε στο 4ο Κεφάλαιο.
2. Η χαρακτηριστική εξίσωση
Για ένα τυπικό αεροσκάφος, το εγκάρσιο-διεύθυνσης χαρακτηριστικό πολυώνυμο είναι τέταρτης τάξης, καθορίζει τον κοινό παρονομαστή των συναρτήσεων μεταφοράς ενώ όταν εξισώνεται με το μηδέν προσδιορίζεται η χαρακτηριστική εξίσωση:
|
|
|
(5.11) |
Η χαρακτηριστική εξίσωση (5.11) παραγοντοποιείται σε δύο πραγματικές ρίζες και σε ένα ζεύγος μιγαδικών ριζών :
|
|
|
(5.12) |
Από την έκφραση της χαρακτηριστικής εξίσωσης, διακρίνονται τρεις μορφές κίνησης, όπως καταγράφονται από τον Nelson [5]:
• Η μορφή του σπειροειδούς (spiral mode), η οποία είναι μία μη ταλαντωτική μορφή που περιγράφεται από την πρώτη πραγματική ρίζα της χαρακτηριστικής εξίσωσης (5.12)
• Η μορφή υποχώρησης της περιστροφής (roll subsidence), η οποία είναι επίσης μη ταλαντωτική μορφή και περιγράφεται από τη δεύτερη πραγματική ρίζα της χαρακτηριστικής εξίσωσης (5.12)
• Η μορφή της ολλανδικής περιστροφής (dutch roll) που είναι ταλαντωτική μορφή και περιγράφεται από το ζεύγος των μιγαδικών ριζών της χαρακτηριστικής εξίσωσης (5.12).
Οι εξισώσεις κίνησης από τις οποίες προέκυψε η χαρακτηριστική
εξίσωση αναφέρονται στο σύστημα αξόνων του ανέμου, οπότε οι μορφές ευστάθειας
που περιγράφονται με την εξίσωση (5.12) μας παρέχουν την πλήρη περιγραφή της
εγκάρσιας-διεύθυνσης δυναμικής του αεροσκάφους σε σχέση με το διάνυσμα της
μόνιμης ολικής ταχύτητας ![]() και
με τους περιορισμούς των μικρών διαταραχών που τέθηκαν κατά την εξέλιξή του.
και
με τους περιορισμούς των μικρών διαταραχών που τέθηκαν κατά την εξέλιξή του.
Όταν οι εξισώσεις κίνησης αναφέρονται στο σωματόδετο σύστημα αναφοράς, η εξίσωση κατάστασης (5.2) είναι 5ης τάξης και η χαρακτηριστική εξίσωση είναι επίσης πέμπτης τάξης. Τότε το χαρακτηριστικό πολυώνυμο αναλύεται στους ακόλουθους παράγοντες:
|
|
|
(5.13) |
Οι μορφές της ευστάθειας εξακολουθούν να ορίζονται με τον ίδιο τρόπο. Η διαφορά είναι η προσθήκη της μηδενικής ρίζας που υποδεικνύει ουδέτερη ευστάθεια ως προς την εκτροπή ή αλλιώς ως προς την πορεία (heading) που ακολουθεί το αεροσκάφος. Η μηδενική ρίζα προκύπτει από την προσθήκη της γωνίας εκτροπής ψ, στην εξίσωση κατάστασης. Η ερμηνεία της εγκάρσιας-διεύθυνσης δυναμικής παραμένει η ίδια με προηγουμένως ενώ η επιπλέον πληροφορία απλά μας δίνει την ένδειξη ότι το αεροσκάφος δεν έχει συγκεκριμένη γωνία εκτροπής ή πορείας. Με άλλα λόγια, η εγκάρσια-διεύθυνσης δυναμική του αεροσκάφους επιλύεται γύρω από το διάνυσμα της μόνιμης ολικής ταχύτητας με την υπόθεση ότι το αεροσκάφος έχει μια αυθαίρετη διεύθυνση. Η ερμηνεία των μη μηδενικών ριζών της χαρακτηριστικής εξίσωσης είναι συνυφασμένη με τις ιδιότητες της κλασσικής διάταξης μάζας-ελατηρίου-αποσβεστήρα όπως αναλύεται στο παράρτημα Β.2.2.
Καθώς οι μορφές της ευστάθειας δεν είναι τόσο διακριτές, υφίσταται μεγαλύτερη σύζευξη ή αλληλεπίδραση των μορφών σε σχέση με την περίπτωση της διαμήκους δυναμικής. Έτσι, ενώ οι υποθέσεις που γίνονται κατά την επίλυση είναι λιγότερο κατάλληλες, καθιερώθηκε ένας συνδυασμός αποδεκτών διαδικασιών οι οποίες ακολουθούνται και στη συνέχεια. Ο αντικειμενικός σκοπός βέβαια είναι ο εντοπισμός των αεροδυναμικών παραγόντων που κυριαρχούν σε κάθε μια από τις μορφές ευστάθειας.
Η σύνδεση ανάμεσα στη δυναμική συμπεριφορά του αεροσκάφους και τα αεροδυναμικά του χαρακτηριστικά πραγματοποιείται, όπως προαναφέρθηκε, μέσω των παραγώγων ευστάθειας οι οποίες εμφανίζονται αντικαθιστώντας τις συντετμημένες παραγώγους από το παράρτημα Δ.3.1 συναρτήσει των διαστατών παραγώγων ευστάθειας, στην εξίσωση κατάστασης. Περαιτέρω ανάλυση είναι αδύνατη εκτός και εάν εφαρμοστούν πολύ μεγάλες παραδοχές. Για να αντιμετωπιστεί αυτή τη δυσκολία μπορεί να χρησιμοποιηθεί το μοντέλο μειωμένης τάξης όπως θα αναλυθεί σε επόμενη παράγραφο.
3. Οι μορφές της δυναμικής ευστάθειας
Όπως ακριβώς και με τις μορφές της διαμήκους ευστάθειας, οποτεδήποτε το αεροσκάφος υφίσταται κάποια διαταραχή σε σχέση με την κατάσταση ισορροπίας εμφανίζονται οι μορφές της εγκάρσιας-διεύθυνσης ευστάθειας. Η διαταραχή μπορεί να προκληθεί από τους χειρισμούς του πιλότου, από μια μεταβολή στην ισχύ, μια μεταβολή στη διαμόρφωση του αεροσκάφους, όπως για παράδειγμα η έκταση του συστήματος προσγείωσης ή από κάποιο εξωτερικό παράγοντα όπως μια ριπή ανέμου ή μια ατμοσφαιρική ανατάραξη.
3.1. Η μορφή υποχώρησης της περιστροφής
Η μορφή υποχώρησης της περιστροφής (roll subsidence mode), είναι ένα μη ταλαντωτικό εγκάρσιο χαρακτηριστικό το οποίο συνήθως είναι σημαντικά αποσυζευγμένο από τη μορφή του σπειροειδούς και της ολλανδικής περιστροφής. Επειδή είναι μη ταλαντωτικό περιγράφεται από μια και μόνη πραγματική ρίζα του χαρακτηριστικού πολυωνύμου, ενώ εμφανίζεται ως ένα εκθετικό χαρακτηριστικό καθυστέρησης στην κίνηση περιστροφής. Οι αρχές της μηχανικής της πτήσης που καθορίζουν αυτή τη συμπεριφορά απεικονίζονται στο σχήμα 5.1.
Σχήμα 5.1 Βασικά μεγέθη στη μορφή υποχώρησης της περιστροφής
Στο σχήμα 5.1 απεικονίζεται η πρόσοψη του αεροσκάφους, εφόσον
όπως ορίστηκε στο υποκεφάλαιο 2.1.2 του Κεφ.1,
θετική περιστροφή σημαίνει ότι η δεξιά πτέρυγα κινείται προς τα κάτω . Υποτίθεται
ότι το αεροσκάφος έχει μόνο ένα βαθμό ελευθερίας, ως προς την περιστροφή, περί
τον άξονα οx και ότι πετά σε αντισταθμισμένη πτήση με τις πτέρυγες οριζόντιες. Τότε,
όταν το αεροσκάφος δεχτεί μια διαταραχή θετικής ροπής περιστροφής L θα ξεκινήσει να στρέφεται με γωνιακή επιτάχυνση p = ![]() σύμφωνα
με τον 2o νόμο
του Νεύτωνα:
σύμφωνα
με τον 2o νόμο
του Νεύτωνα:
|
|
|
(5.14) |
Εφόσον το αεροσκάφος είναι εγκάρσια στατικά ευσταθές, οι αεροδυναμικοί μηχανισμοί θα δημιουργήσουν μια ροπή περιστροφής επαναφοράς προς την κατάσταση ισορροπίας. Αν καθοριστούν δείκτες 1 και 2 για τη δεξιά (κατερχόμενη) και την αριστερή (ανερχόμενη) ως προς τον πιλότο πτέρυγα αντίστοιχα, τότε κατά τη θετική περιστροφική κίνηση:
•
Η κάθε πτέρυγα βλέπει μια συνιστώσα ![]() της ολικής ταχύτητας
της ολικής ταχύτητας ![]() ,
που είναι κάθετη στο επίπεδό της.
,
που είναι κάθετη στο επίπεδό της.
• Αυξάνεται η γωνία πρόσπτωσης της κατερχόμενης, δεξιάς πτέρυγας.
• Αντίστοιχα μειώνεται η γωνία πρόσπτωσης της ανερχόμενης αριστερής πτέρυγας.
• Η διαφορική άνωση που δημιουργείται, προκαλεί με τη σειρά της, την εμφάνιση μιας περιστροφικής ροπής επαναφοράς.
• Η διαφορική οπισθέλκουσα που δημιουργείται, προκαλεί με τη σειρά της ροπή εκτροπής, αλλά αυτή είναι τόσο μικρή ώστε μπορεί να αγνοηθεί.
• Μετά τη διαταραχή ο ρυθμός περιστροφής p αυξάνεται εκθετικά έως ότου η διορθωτική ροπή εξισορροπήσει τη ροπή που προκάλεσε η διαταραχή και το αεροσκάφος αποκτήσει τελικά ένα σταθερό ρυθμό περιστροφής.
Στην πράξη αυτού του είδους η συμπεριφορά είναι περισσότερο μεταβατική παρά συνεχόμενη. Η φυσική συμπεριφορά που μόλις περιγράφηκε προκαλεί σταθεροποίηση σε όλα τα αεροσκάφη που επιχειρούν μέσα στα γραμμικά αεροδυναμικά όρια του φακέλου πτήσης τους. Για τον λόγο αυτό η συγκεκριμένη μορφή ευστάθειας μερικές φορές ονομάζεται και «απόσβεση της περιστροφής» (damping in roll).
Σε μερικά μοντέρνα μαχητικά αεροσκάφη, που έχουν σχεδιαστεί ώστε
να επιχειρούν σε κάποιες σημαντικά μη γραμμικές αεροδυναμικές συνθήκες πτήσης,
για παράδειγμα σε γωνίες πρόσπτωσης που προσεγγίζουν τις ![]() , είναι
δυνατόν οι φυσικές συνθήκες που καθορίζουν τη μορφή της περιστροφής να πάψουν
να ισχύουν σχεδόν τελείως, όπως αναφέρεται στο [3]. Η
συνεπαγόμενη απώλεια της ευστάθειας ως προς την περιστροφή μπορεί να οδηγήσει
στο λεγόμενο “roll departure”, δηλαδή σε απώλεια ελέγχου του αεροσκάφους με την
εμφάνιση συνεχόμενων περιστροφών που μπορεί να ακολουθηθεί από σύνθετες
κινήσεις του αεροσκάφους ως προς τον κατακόρυφο ή τον εγκάρσιο άξονα αρκετά
επικίνδυνης φύσης (δηλαδή πτήση κοντά στα όρια έναρξης περιδίνησης).
, είναι
δυνατόν οι φυσικές συνθήκες που καθορίζουν τη μορφή της περιστροφής να πάψουν
να ισχύουν σχεδόν τελείως, όπως αναφέρεται στο [3]. Η
συνεπαγόμενη απώλεια της ευστάθειας ως προς την περιστροφή μπορεί να οδηγήσει
στο λεγόμενο “roll departure”, δηλαδή σε απώλεια ελέγχου του αεροσκάφους με την
εμφάνιση συνεχόμενων περιστροφών που μπορεί να ακολουθηθεί από σύνθετες
κινήσεις του αεροσκάφους ως προς τον κατακόρυφο ή τον εγκάρσιο άξονα αρκετά
επικίνδυνης φύσης (δηλαδή πτήση κοντά στα όρια έναρξης περιδίνησης).
Παρόλα αυτά σε ένα συμβατικό αεροσκάφος ο τύπος της περιστροφής παρουσιάζεται στον πιλότο ως μια καθυστέρηση στην απόκριση των πηδαλίων ως προς την κλίση του αεροσκάφους. Η χρονική σταθερά της καθυστέρησης εξαρτάται κατά μεγάλο βαθμό από τη ροπή αδράνειας διατοιχισμού Ix, καθώς και από τις αεροδυναμικές ιδιότητες της πτέρυγας ενώ είναι Τr ~ 1 sec.
3.2. Η μορφή του σπειροειδούς
Το σπειροειδές (spiral mode), είναι επίσης μη ταλαντωτικό και καθορίζεται από την άλλη πραγματική ρίζα στο χαρακτηριστικό πολυώνυμο. Η διέγερση αυτής της μορφής, έχει συνήθως αργή εξέλιξη, ενώ εμπλέκονται περίπλοκες συζευγμένες κινήσεις ως προς την εκτροπή, την κλίση και την πλαγιολίσθηση. Οι κυρίαρχες αρχές της μηχανική της πτήσης που προσδιορίζουν τη δυναμική αυτού του τύπου απεικονίζονται στο σχήμα 5.2. Τα χαρακτηριστικά αυτής της μορφής εξαρτώνται σε μεγάλο βαθμό από την εγκάρσια στατική ευστάθεια, καθώς και από τη στατική ευστάθεια διεύθυνσης του αεροσκάφους, όπως παρουσιάστηκαν στο υποκεφάλαιο 4 του κεφαλαίου 2.
Βίντεο 5.1 Η μορφή του σπειροειδούς
Το σπειροειδές διεγείρεται -όπως και στην προηγούμενη μορφή της υποχώρησης της περιστροφής- μετά από μια διαταραχή της ροπής περιστροφής L, που η θετική φορά ορίζει ως κατερχόμενη τη δεξιά πτέρυγα και προκαλεί μια διαταραχή πλαγιολίσθησης β. Υποθέτοντας ότι το αεροσκάφος πετά αντισταθμισμένο σε οριζόντια πτήση:
• Η ροπή διαταραχής L, προκαλεί την εμφάνιση μια μικρής κλίσης γωνίας φ.
• Εφόσον δεν υπάρξει κάποια διορθωτική ενέργεια από τον πιλότο η κλίση προκαλεί πλαγιολίσθηση με ταχύτητα v, όπως φαίνεται στην εικόνα (a) του σχήματος 5.2.
• Η πλαγιολίσθηση θέτει το κάθετο σταθερό (fin) σε γωνία πρόσπτωσης β που έτσι παράγει άνωση και συνεπώς μια ροπή εκτροπής Ν, η οποία τείνει να επαναφέρει την κεφαλή του αεροσκάφους προς τη διεύθυνση της πλαγιολίσθησης.
• Η εκτροπή παράγει διαφορική άνωση κατά μήκος του εκπετάσματος των πτερύγων, που με τη σειρά της προκαλεί ανάλογη ροπή διατοιχισμού L και έτσι η δεξιά πτέρυγα κατέρχεται περαιτέρω επιδεινώνοντας το φαινόμενο. Αυτή η εξέλιξη φαίνεται στις εικόνες (b) και (c).
• Η επίδραση της δίεδρης γωνίας, λειτουργεί διορθωτικά με τη δημιουργία αντίθετης ροπής διατοιχισμού λόγω της πλαγιολίσθησης.
• Η άνωση στο κάθετο σταθερό, που συνήθως έχει σημείο εφαρμογής λίγο πάνω από τον άξονα Οx, προκαλεί επίσης μια μικρή διορθωτική ροπή.
Κατά την εξέλιξη του φαινομένου, η επίδραση του κάθετου σταθερού, δηλαδή η στατική ευστάθεια διεύθυνσης και η επίδραση της δίεδρης γωνίας δηλαδή η εγκάρσια στατική ευστάθεια, αντιδρούν. Τυπικά οι απαιτήσεις που θέτουν οι κανονισμοί είναι τέτοιες ώστε τα αντίθετα φαινόμενα που προκαλούνται πρέπει να αλληλοεξουδετερώνονται. Όταν η επίδραση της δίεδρης γωνίας υπερνικά την επίδραση του κάθετου σταθερού, η μορφή του σπειροειδούς είναι ευσταθής, ενώ όταν συμβαίνει το αντίθετο το σπειροειδές είναι ασταθές.
Αφού λοιπόν αυτοί οι παράγοντες είναι σχεδόν ισοδύναμοι το σπειροειδές καθίσταται σχεδόν ουδέτερα ευσταθές ή και πλήρως ουδέτερα ευσταθές, δηλαδή ούτε αποκλίνον ούτε συγκλίνον. Όπως προαναφέρθηκε, αυτή η μορφή είναι μη ταλαντωτική, οπότε εμφανίζεται ως μια εκθετική σύγκλιση ή απόκλιση και αφού είναι σχεδόν ουδέτερη, η χρονική σταθερά είναι πολύ μεγάλη-περίπου 100 sec ή και περισσότερο. Αυτό σημαίνει ότι όταν το σπειροειδές είναι ευσταθές, η πτέρυγα επιστρέφει στον ορίζοντα πολύ αργά μετά από τη διαταραχή, ενώ όταν είναι ασταθές, ο ρυθμός της απόκλισης είναι επίσης πολύ αργός. Όταν είναι ουδέτερα ευσταθές, το αεροσκάφος απλά πετά σε μια στροφή με σταθερή κλίση.
Αυτό που μας κινεί περισσότερο την προσοχή, για προφανείς λόγους, είναι φυσικά η ασταθής κατάσταση. Όταν εμφανιστεί το σπειροειδές το αεροσκάφος πετά με ένα ελαφρά αποκλίνον ίχνος πτήσης τόσο ως προς την κλίση όσο και ως προς την εκτροπή ενώ ταυτόχρονα, καθώς οι κατακόρυφες δυνάμεις δεν βρίσκονται σε ισορροπία, το αεροσκάφος χάνει και ύψος. Έτσι, το ασταθές ίχνος πτήσης είναι μια σπειροειδής βύθιση η οποία εφόσον δεν ελεγχθεί θα σταματήσει όταν το αεροσκάφος χτυπήσει το έδαφος! Όμως επειδή ο ρυθμός απόκλισης είναι πολύ αργός, οι περισσότεροι πιλότοι εύκολα αντιμετωπίζουν το σπειροειδές.
Κατά συνέπεια το ασταθές σπειροειδές (σπειροειδής
βύθιση-spiral departure) είναι δυνατόν να επιτραπεί με την προϋπόθεση ότι η
χρονική σταθερά ![]() είναι
επαρκώς μεγάλη. Από την άλλη όμως, επειδή το φαινόμενο εξελίσσεται πολύ αργά και
οι επιταχύνσεις που αναπτύσσονται είναι πολύ μικρές, ο πιλότος έχει πολύ λίγες
ενδείξεις ώστε να αντιληφθεί τι ακριβώς συμβαίνει με βάση το σύστημα ισορροπίας
του ανθρώπινου οργανισμού.
είναι
επαρκώς μεγάλη. Από την άλλη όμως, επειδή το φαινόμενο εξελίσσεται πολύ αργά και
οι επιταχύνσεις που αναπτύσσονται είναι πολύ μικρές, ο πιλότος έχει πολύ λίγες
ενδείξεις ώστε να αντιληφθεί τι ακριβώς συμβαίνει με βάση το σύστημα ισορροπίας
του ανθρώπινου οργανισμού.
Έτσι, κατά τη σπειροειδή βύθιση, τα οπτικά ερεθίσματα (visual cues) από τον περιβάλλοντα χώρο-έδαφος, καθίστανται τα σημαντικότερα εφόδια που έχει ο πιλότος για να αντιληφθεί την κατάσταση, όπως σημειώνει και ο Nelson [5]. Πρέπει εδώ να τονιστεί ότι η σπειροειδής βύθιση, δεν είναι το ίδιο με την περιδίνηση. Η κίνηση του αεροσκάφους στην περιδίνηση, πραγματοποιείται με το αεροσκάφος σε πλήρως ανεπτυγμένη απώλεια στήριξης (stall), ενώ στη σπειροειδή βύθιση η πτέρυγα συνεχίζει να πετά κατά τη συνηθισμένη έννοια.
3.3. Η μορφή της ολλανδικής περιστροφής
Η ολλανδική περιστροφή είναι ουσιαστικά μια κλασσική αποσβενόμενη ταλάντωση ως προς την εκτροπή περί τον άξονα Οz που εμφανίζει σύζευξη με την περιστροφή και σε λιγότερο βαθμό με την πλαγιολίσθηση. Η κίνηση λοιπόν που περιγράφεται με την ολλανδική περιστροφή, είναι μια σύνθετη αλληλεπίδραση ανάμεσα σε όλους τους βαθμούς ελευθερίας της εγκάρσιας-διεύθυνσης δυναμικής. Τα χαρακτηριστικά του περιγράφονται από το ζεύγος των μιγαδικών ριζών στο χαρακτηριστικό πολυώνυμο (5.12).
Ουσιαστικά η ολλανδική περιστροφή, είναι το ισοδύναμο της εγκάρσιας-διεύθυνσης δυναμικής, με τη μορφή της μικρής περιόδου της διαμήκους δυναμικής. Επειδή οι ροπές αδρανείας πρόνευσης και εκτροπής έχουν παρόμοιο μέγεθος οι συχνότητες της ολλανδικής περιστροφής και της μικρής περιόδου είναι παρόμοιες. Όμως, επειδή το κάθετο σταθερό είναι λιγότερο αποτελεσματικό ως αποσβεστήρας σε σχέση με το οριζόντιο σταθερό, η απόσβεση της είναι συνήθως μη επαρκής. Η μορφή αυτή ονομάστηκε έτσι, επειδή η κίνηση του αεροσκάφους μοιάζει με τη ρυθμική κίνηση ενός Ολλανδού παγοδρόμου στα παγωμένα κανάλια της Ολλανδίας! Ένας κύκλος από την κίνηση του αεροσκάφους φαίνεται στο σχήμα 5.3
Βίντεο 5.2 Η μορφή της ολλανδικής περιστροφής
Η φυσική κατάσταση που εμφανίζεται εδώ, μπορεί να γίνει αντιληπτή πιο εύκολα, εάν απεικονιστεί το αεροσκάφος σαν να είναι αναρτημένο ως προς τη διεύθυνση, από ένα ελατήριο που επενεργεί περί τον άξονα Οz. Τα χαρακτηριστικά ακαμψίας του ελατηρίου είναι αεροδυναμικά και προσδιορίζονται σε μεγάλο βαθμό από το κάθετο σταθερό. Καθώς το αεροσκάφος πετά αντισταθμισμένο σε ευθεία οριζόντια πτήση ισορροπίας, εφαρμόζεται μια ροπή διαταραχής Ν, ως προς την εκτροπή:
• Το αεροδυναμικό ισοδύναμο του ελατηρίου του κάθετου σταθερού, προκαλεί μια διορθωτική ροπή εκτροπής -Ν που καταλήγει στην κλασσική ταλάντωση.
• Όταν η ταλάντωση αυτή αναπτυχθεί πλήρως, η σχετική ταχύτητα του αέρα πάνω από τη δεξιά και την αριστερή πτέρυγα, μεταβάλλεται ανάλογα, με ταλαντωτικό τρόπο.
• Η συμπεριφορά της σχετικής ταχύτητας με τη σειρά της, προκαλεί ταλαντωτικές διαφορικές μεταβολές της άνωσης και της οπισθέλκουσας.
• Αυτή η αεροδυναμική σύζευξη προκαλεί μια ταλάντωση ως προς την περιστροφή, που υστερεί της ταλάντωσης ως προς την εκτροπή κατά 90°.
• Λόγω της διαφοράς φάσης ανάμεσα στην κίνηση της εκτροπής και της περιστροφής, η πτέρυγα που προηγείται κατέρχεται ενώ η πτέρυγα που οπισθοχωρεί ανέρχεται, όπως φαίνεται στο σχήμα 6.5.
Κατά συνέπεια, η κίνηση υποδηλώνεται από το ίχνος που σημειώνουν τα ακροπτερύγια ως προς τον ορίζοντα, το οποίο είναι συνήθως ελλειπτικό, κάτι που επίσης φαίνεται στο ίδιο σχήμα.
|
|
|
(5.15) |
Αυτή η συνθήκη, υποδηλώνει ευσταθή ολλανδική περιστροφή. Αντίθετα όταν αυτός ο λόγος είναι μεγαλύτερος από ένα είναι πιθανόν να προκύψει ασταθής ολλανδική περιστροφή. Οποτεδήποτε οι πτέρυγες διαταράσσονται από την ισορροπία το αεροσκάφος αρχίζει να πλαγιολισθαίνει προς την πτέρυγα που είναι χαμηλότερα. Έτσι, η ταλαντωτική κίνηση ως προς τον διατοιχισμό κατά την ολλανδική περιστροφή, οδηγεί σε κάποιας έκτασης ταλαντωτική κίνηση ως προς την εκτροπή, αν και η ταχύτητα της πλαγιολίσθησης είναι γενικά μικρή. Οι αεροδυναμικές ιδιότητες του κάθετου σταθερού καθορίζουν σε μεγάλο βαθμό τόσο την απόσβεση όσο και την ακαμψία στην εκτροπή, που με τη σειρά τους ορίζουν τα χαρακτηριστικά αυτής της μορφής της ευστάθειας. Έτσι, για ευσταθή ολλανδική περιστροφή, απαιτείται η ύπαρξη ενός μεγάλου κάθετου σταθερού στο αεροσκάφος. Δυστυχώς αυτό αντιτίθεται στην απαίτηση για ευσταθές σπειροειδές όπως έγινε εμφανές προηγουμένως.
Συνεπώς κατά τη σχεδίαση, η μέση λύση που συνήθως προτιμάται είναι ελαφρώς ασταθές σπειροειδές και ολλανδική περιστροφή με φτωχή απόσβεση. Φυσικά η πολυπλοκότητα της υπονοεί ότι εκτός του κάθετου σταθερού υφίστανται και άλλοι αεροδυναμικοί παράγοντες (π.χ. η γεωμετρία της κύριας πτέρυγας) που διαμορφώνουν τα χαρακτηριστικά του, που μάλιστα παίζουν εξίσου σημαντικό ρόλο με το κάθετο σταθερό. Για αυτόν τον λόγο είναι εξαιρετικά δύσκολο να ποσοτικοποιηθούν όλοι οι παράγοντες που διαμορφώνουν τα χαρακτηριστικά της ολλανδικής περιστροφής.
4. Μοντέλο μειωμένης τάξης
Σε αντίθεση με τις διαμήκεις εξισώσεις κίνησης είναι πιο δύσκολη η επίλυση των εξισώσεων της εγκάρσιας-διεύθυνσης δυναμικής με κάποιου είδους προσέγγιση. Επειδή όπως προαναφέρθηκε, υφίσταται κάποιας μορφής σύζευξη στην κίνηση, άλλοτε περισσότερο και άλλοτε λιγότερο, οι τρεις μορφές δεν είναι τόσο διακριτές με επακόλουθο οι απλοποιήσεις να καταλήγουν σε απώλεια της ακρίβειας. Έτσι, ουσιαστικά τέτοιες προσεγγίσεις δεν έχουν πρακτική σημασία-εκτός από το να μας παρέχουν κάποια επιπλέον κατανόηση της μηχανικής της κίνησης κατά το εγκάρσιο επίπεδο και το επίπεδο διεύθυνσης.
Όπως προαναφέρθηκε και σε αντιστοιχία με τη διαμήκη χαρακτηριστική εξίσωση, για την εγκάρσια-διεύθυνσης δυναμική το χαρακτηριστικό πολυώνυμο εκφράζεται ως:
|
|
|
(5.16) |
Δεδομένου βέβαια ότι οι εξισώσεις κίνησης αναφέρονται στους άξονες του ανέμου. Η πιο απλή και ταυτόχρονα η πιο ακριβής λύση της χαρακτηριστικής εξίσωσης μας παρέχει μια αρχική προσέγγιση μόνο για τις δύο πραγματικές λύσεις. Παρατηρείται ότι στα συμβατικά αεροσκάφη οι συντελεστές A, B, C, D και E δεν μεταβάλλονται σημαντικά με τις συνθήκες πτήσης. Τυπικά οι Α και Β είναι σχετικά μεγάλοι ενώ οι D και E είναι πολύ συχνά κοντά στο μηδέν. Επιπλέον έχει παρατηρηθεί ότι Β>>Α και E<<D οπότε οι λύσεις προσεγγίζονται από τις εξής εκφράσεις, όπως ορίζονται στο [3]:
|
|
|
(5.17) |
Για το ζεύγος των μιγαδικών ριζών που περιγράφουν την ολλανδική περιστροφή, δεν υφίστανται τέτοιες απλές προσεγγιστικές λύσεις. Με την εφαρμογή κάποιων επιπλέον υποθέσεων στις εκφράσεις για τα A, B, C, D και E, που δίνονται στο παράρτημα Γ.3.2, που βασίζονται στην παρατηρούμενη συμπεριφορά των μορφών ευστάθειας σε πραγματικά αεροσκάφη, θα μπορούσαν να γίνουν πιο κατανοητοί οι αεροδυναμικοί παράγοντες που διαμορφώνουν την περιστροφή και το σπειροειδές. Ευτυχώς οι ίδιες πληροφορίες μπορούν να ληφθούν και από μια παλαιότερη μέθοδο που εμπλέκει τη μείωση της τάξης των εξισώσεων κίνησης. Οι εξισώσεις (5.17) μπορούν να χρησιμοποιηθούν για πρόχειρο έλεγχο των λύσεων που προκύπτουν από τον υπολογιστή ή για την αρχική εκτίμηση των δύο μορφών εγκάρσιας-διεύθυνσης δυναμικής του αεροσκάφους.
4.1. Η προσέγγιση της περιστροφής
Με την προϋπόθεση ότι η διαταραχή είναι μικρή, παρατηρείται ότι η μορφή της υποχώρησης της περιστροφής, εμπλέκει μόνο κίνηση διατοιχισμού με πολύ μικρή σύζευξη ως προς την πλαγιολίσθηση ή την εκτροπή. Έτσι, το μοντέλο της μειωμένης τάξης προκύπτει μηδενίζοντας τις παραγώγους ευστάθειας της πλάγιας δύναμης και της ροπής εκτροπής από την εγκάρσια-διεύθυνσης εξίσωση κατάστασης (5.2):
|
|
|
(5.18) |
Άρα:
|
|
|
(5.19) |
Επιπλέον, εφόσον αναφερόμαστε στο σύστημα αξόνων του ανέμου τότε lφ = 0 και η εξίσωση (5.19) καταλήγει στην εξίσωση της ροπής διατοιχισμού με ένα βαθμό ελευθερίας:
|
|
|
(5.20) |
|
|
|
(5.21) |
Λαμβάνοντας το μετασχηματισμό Laplace της εξίσωσης (5.20) με
μηδενικές αρχικές συνθήκες και με την υπόθεση ότι το πηδάλιο διεύθυνσης
διατηρείται σταθερό,![]() =
0 προκύπτει:
=
0 προκύπτει:
|
|
|
(5.22) |
Τότε η συνάρτηση μεταφοράς του ρυθμού περιστροφής ως προς τα πηδάλια κλίσης είναι:
|
|
|
(5.23) |
Αυτή συνάρτηση μεταφοράς, είναι το μειωμένης τάξης ισοδύναμο της
συνάρτησης μεταφοράς που δίνεται με την (5.4) και αποτελεί
απλώς τη γνωστή καθυστέρηση φάσης (phase lag) με χρονική σταθερά Τr.
Για κίνηση μικρών διαταραχών η εξίσωση (5.25) περιγράφει με ικανοποιητική
ακρίβεια τα πρώτα ![]() της
απόκρισης διατοιχισμού ως προς τα πηδάλια κλίσης και μπορεί να χρησιμοποιηθεί
ως μέσο για τον προσδιορισμό των κυρίαρχων αεροδυναμικών παραγώγων ευστάθειας
που καθορίζουν τη χρονική σταθερά της μορφής της περιστροφής. Αντικαθιστώντας
τις συντετμημένες αεροδυναμικές παραγώγους ευστάθειας από το παράρτημα Δ.3.1, η χρονική σταθερά
της μορφής υποχώρησης της περιστροφής είναι κατά προσέγγιση:
της
απόκρισης διατοιχισμού ως προς τα πηδάλια κλίσης και μπορεί να χρησιμοποιηθεί
ως μέσο για τον προσδιορισμό των κυρίαρχων αεροδυναμικών παραγώγων ευστάθειας
που καθορίζουν τη χρονική σταθερά της μορφής της περιστροφής. Αντικαθιστώντας
τις συντετμημένες αεροδυναμικές παραγώγους ευστάθειας από το παράρτημα Δ.3.1, η χρονική σταθερά
της μορφής υποχώρησης της περιστροφής είναι κατά προσέγγιση:
|
|
|
(5.24) |
Η εξίσωση (5.24) μπορεί να απλοποιηθεί περαιτέρω με την παρατήρηση ότι Ix ≫ Ixz και Iz ≫ Ixz ώστε να μας δώσει την κλασσική προσέγγιση για τη χρονική σταθερά της μορφής υποχώρησης της περιστροφής:
|
|
|
(5.25) |
όπου Ix είναι η ροπή αδρανείας
διατοιχισμού και ![]() είναι
η διαστατοποιημένη παράγωγος ευστάθειας που περιγράφει την αεροδυναμική
απόσβεση ως προς την κλίση.
είναι
η διαστατοποιημένη παράγωγος ευστάθειας που περιγράφει την αεροδυναμική
απόσβεση ως προς την κλίση.
4.2. Η προσέγγιση του σπειροειδούς
Επειδή το σπειροειδές είναι πολύ αργό ως προς την εξέλιξή του μετά από την εφαρμογή της διαταραχής, είναι σύνηθες να υποτίθεται ότι οι μεταβλητές κίνησης v, p και r είναι ψευδοστατικές σε σχέση με την κλίμακα χρόνου της μορφής αυτής. Επομένως:
|
|
|
(5.26) |
Και η εγκάρσια-διεύθυνσης εξίσωση κατάστασης μπορεί να γραφεί :
|
|
|
(5.27) |
Επιπλέον υποθέτοντας άξονες αναφοράς τους άξονες ανέμου και ότι τα χειριστήρια διατηρούνται σταθεροποιημένα, έτσι ώστε η κίνηση να θεωρηθεί μη εξαναγκασμένη, τότε η εξίσωση κατάστασης απλοποιείται περαιτέρω:
|
|
|
(5.28) |
|
|
|
(5.29) |
Οι πρώτες τρεις γραμμές στην εξίσωση (5.29) μπορούν να ξαναγραφτούν, ώστε να μην περιλαμβάνουν τις μεταβλητές v και r, ώστε τελικά να προκύπτει μια εξίσωση μειωμένης τάξης στην οποία οι μόνες μεταβλητές θα είναι ο ρυθμός περιστροφής p και η γωνία φ:
|
|
|
(5.30) |

Ισχύει όμως ότι:
|
|
|
(5.31) |
Έτσι, η εξίσωση (5.30) απλοποιείται στην εξής:
|
|
|
(5.32) |
Επειδή ![]() ,
η εξίσωση (5.32) καταλήγει στην εξίσωση ενός βαθμού ελευθερίας που περιγράφει
κατά προσέγγιση τη μη εξαναγκασμένη περιστροφική κίνηση η οποία εμπλέκεται στο
σπειροειδές:
,
η εξίσωση (5.32) καταλήγει στην εξίσωση ενός βαθμού ελευθερίας που περιγράφει
κατά προσέγγιση τη μη εξαναγκασμένη περιστροφική κίνηση η οποία εμπλέκεται στο
σπειροειδές:
|
|
|
(5.33) |
Ο μετασχηματισμός Laplace της εξίσωσης (5.33) με μηδενικές αρχικές συνθήκες είναι:
|
|
|
(5.34) |
Πρέπει να σημειωθεί ότι η (5.34) που αποτελεί πλέον την εγκάρσια-διεύθυνσης χαρακτηριστική εξίσωση είναι μειωμένης τάξης, ενώ διατηρεί μια πολύ χονδρική περιγραφή μόνο των χαρακτηριστικών του σπειροειδούς. Μια προσεγγιστική έκφραση για τη χρονική σταθερά του σπειροειδούς είναι:
|
|
|
(5.35) |
Η χρονική σταθερά του σπειροειδούς μπορεί να εκφραστεί συναρτήσει των αεροδυναμικών παραγώγων ευστάθειας από το παράρτημα Δ.3.1 ενώ ισχύουν:
|
|
|
(5.36) |
Εφόσον αναφερόμαστε στους άξονες του ανέμου. Τότε προκύπτει:
|
|
|
(5.37) |
Για ευσταθές σπειροειδές πρέπει η χρονική σταθερά Τs να είναι θετική. Τυπικά για τα περισσότερα αεροσκάφη σε υποηχητική ταχύτητα ισχύει :
|
|
|
(5.38) |
H συνθήκη ώστε το σπειροειδές να είναι ευσταθές μπορεί να απλοποιηθεί στην κατά προσέγγιση κλασική απαίτηση:
|
|
|
(5.39) |
Εφόσον εκφράζοντας τις παραγώγους στην εξίσωση (5.39) με όρους των αεροδυναμικών ιδιοτήτων του σκάφους προκύπτει περαιτέρω ανάλυση της σχέσης αυτής. Αυτό σημαίνει ότι η επίδραση της δίεδρης γωνίας Lv και η απόσβεση ως προς την εκτροπή Nr, πρέπει να είναι μεγάλες ενώ η ακαμψία ως προς την εκτροπή Nv, πρέπει να είναι μικρή. Η ροπή διατοιχισμού λόγω του ρυθμού εκτροπής Lr, είναι συνήθως θετική και βέβαια σημαντική σε μέγεθος. Με απλά λόγια αεροσκάφη με μικρά κάθετα σταθερά και εύλογα μεγάλη δίεδρη γωνία είναι πιθανότερο να έχουν σταθερό σπειροειδές.
4.3. Η προσέγγιση της ολλανδικής περιστροφής
Με σκοπό την κατάστρωση ενός μοντέλου μειωμένης τάξης για την περιγραφή της μορφή αυτής, είναι συνήθης η χονδρική παραδοχή ότι η κίνηση δεν εμπλέκει καμία ανάλογη κίνηση του αεροσκάφους ως προς την κλίση. Είναι σαφές ότι αυτό αντιφάσκει με ότι ειπώθηκε έως τώρα αλλά στηρίζεται στο γεγονός ότι η μορφή αυτή είναι κατά κύριο λόγο μια ταλάντωση ως προς την εκτροπή, ενώ η κίνηση διατοιχισμού προκαλείται, ως δευτερεύων φαινόμενο, από την αεροδυναμική σύζευξη. Πιθανόν δε στα περισσότερα αεροσκάφη ο λόγος της κλίσης προς την εκτροπή, στην ταλάντωση της ολλανδικής περιστροφής, είναι μικρότερος από τη μονάδα φτάνοντας σε κάποιες περιπτώσεις πολύ μικρότερες τιμές-γεγονός που δίνει στην υπόθεσή μας κάποιο βαθμό αξιοπιστίας. Έτσι, η εγκάρσια-διεύθυνσης εξίσωση κατάστασης μπορεί να απλοποιηθεί γράφοντας :
|
|
|
(5.40) |
Όπως και προηγουμένως υποθέτοντας τους άξονες ανέμου ως άξονες αναφοράς και εφόσον τα χειριστήρια διατηρηθούν σταθεροποιημένα έτσι, ώστε η κίνηση να μην είναι εξαναγκασμένη, τότε η εγκάρσια-διεύθυνσης εξίσωση κατάστασης μπορεί να απλοποιηθεί στην εξής:
|
|
|
(5.41) |
|
|
|
(5.42) |
Φέρνοντας έτσι την εξίσωση (5.42) στην ακόλουθη μορφή:
|
|
|
(5.43) |
Το μοντέλο μειωμένης τάξης για τη χαρακτηριστική εξίσωση, που περιγράφει κατά προσέγγιση τα δυναμικά χαρακτηριστικά της ολλανδικής περιστροφής δίνεται από:
|
|
|
(5.44) |
ή διαφορετικά:
|
|
|
(5.45) |
Επομένως οι ιδιότητες απόσβεσης και συχνότητας της μορφής αυτής δίνονται κατά προσέγγιση από τις:
|
|
|
(5.46) |
Σύμφωνα με το παράρτημα Δ.3.2 οι εκφράσεις πού δίνονται με την εξίσωση (5.46) μπορούν να επαναπροσδιοριστούν ως προς τις διαστατές αεροδυναμικές παραγώγους ευστάθειας.
Περισσότερες προσεγγιστικές απλοποιήσεις μπορούν να συντελεστούν
υποθέτοντας ότι ![]() ,
έτσι ώστε
,
έτσι ώστε ![]() και
ότι τόσο η Ιx όσο και Ιz είναι συνήθως πολύ μεγαλύτερες
από την Ιxz κάτι που άλλωστε σχεδόν πάντα ισχύει. Έτσι λοιπόν:
και
ότι τόσο η Ιx όσο και Ιz είναι συνήθως πολύ μεγαλύτερες
από την Ιxz κάτι που άλλωστε σχεδόν πάντα ισχύει. Έτσι λοιπόν:
|
|
|
(5.47) |
Με σύγκριση της απόσβεσης και της συχνότητας στην (5.47) με τις
αντίστοιχες τιμές της διάταξης μάζας-ελατηρίου-αποσβεστήρα είναι εύκολη η
ταυτοποίηση του ρόλου εκείνων των αεροδυναμικών παραγώγων ευστάθειας που
κυριαρχούν στον προσδιορισμό των χαρακτηριστικών της ολλανδικής περιστροφής.
Για παράδειγμα η ![]() αναφέρεται
ως η παράγωγος ευστάθειας της απόσβεσης εκτροπής και η
αναφέρεται
ως η παράγωγος ευστάθειας της απόσβεσης εκτροπής και η ![]() αναφέρεται
ως η παράγωγος ακαμψίας εκτροπής. Τόσο η μια όσο και η άλλη, εξαρτώνται από τον
αεροδυναμικό σχεδιασμό και από τον λόγο όγκου VF
του κάθετου σταθερού, όπως παρουσιάζεται με περισσότερη λεπτομέρεια στο υποκεφάλαιο 4 του κεφαλαίου 6. Αν και η
προσέγγιση της ολλανδικής περιστροφής δίνει μια πολύ φτωχή εικόνα της
πραγματικότητας αποτελεί πολύ χρήσιμο μέσο για την κατανόηση της φυσικής
συμπεριφοράς της δυναμικής της μορφής, όπως επίσης και εκείνων των
αεροδυναμικών παραμέτρων που την προσδιορίζουν.
αναφέρεται
ως η παράγωγος ακαμψίας εκτροπής. Τόσο η μια όσο και η άλλη, εξαρτώνται από τον
αεροδυναμικό σχεδιασμό και από τον λόγο όγκου VF
του κάθετου σταθερού, όπως παρουσιάζεται με περισσότερη λεπτομέρεια στο υποκεφάλαιο 4 του κεφαλαίου 6. Αν και η
προσέγγιση της ολλανδικής περιστροφής δίνει μια πολύ φτωχή εικόνα της
πραγματικότητας αποτελεί πολύ χρήσιμο μέσο για την κατανόηση της φυσικής
συμπεριφοράς της δυναμικής της μορφής, όπως επίσης και εκείνων των
αεροδυναμικών παραμέτρων που την προσδιορίζουν.
Βιβλιογραφία/Αναφορές
|
Michael V. Cook, Flight Dynamics Principles - A Linear Systems Approach to Aircraft Stability and Control, 2nd ed. Oxford, UK: Elsevier Ltd, 2007. |
|
|
Robert C. Nelson, Flight Stability and Automatic Control, 2nd ed. Singapore: WCB/McGraw-Hill, 1998. |
Παράδειγμα 5.1
Στο παράδειγμα αυτό μελετάται η εγκάρσια-διεύθυνσης δυναμική συμπεριφορά του αεροσκάφους Learjet 24. Οι συνθήκες πτήσης και οι τιμές των παραγώγων ευστάθειας δίνονται στο παράρτημα H.2, 2η περίπτωση (Πλεύση με μέγιστο βάρος), όπου το αεροσκάφος βρίσκεται σε ομαλή πτήση με Mach 0,7 στα 40000 ft.
Οι εξισώσεις κίνησης αναφέρονται στους άξονες του ανέμου -οπότε το σύστημα μειώνεται σε 4ης τάξης- και απεικονίζονται με όρους των συντετμημένων μορφών των παραγώγων ευστάθειας στη μορφή του χώρου κατάστασης. Οι αεροδυναμικές παράγωγοι ευστάθειας και ελέγχου δίνονται στην αμερικάνικη σημειολογία, δηλαδή υπό τη μορφή αδιάστατων συντελεστών. Στα παραρτήματα Δ.3.1 και Δ.3.2, δίνονται οι σχέσεις μεταξύ των αδιάστατων, διαστατών και συντετμημένων παραγώγων.
Τα δεδομένα αναφέρονται στους άξονες ευστάθειας. Εφόσον στη μόνιμη κατάσταση δεν υφίσταται πλαγιολίσθηση β, οι άξονες ευστάθειας ταυτίζονται με τους άξονες του ανέμου και δεν απαιτείται μετασχηματισμός τους. Τότε το σύστημα των εξισώσεων στον χώρο κατάστασης προκύπτει:
|
|
|
(Π5.1) |

Επειδή είναι επιθυμητό η συνάρτηση μεταφοράς να περιγράφει τη γωνία πλαγιολίσθησης β και την ταχύτητα πλαγιολίσθησης v, η εξίσωση που περιγράφει την έξοδο επαυξάνεται όπως και στο παράδειγμα 4.1. Για μικρές διαταραχές:
|
|
|
(Π5.2) |
Έτσι, η εξίσωση εξόδου γράφεται :
|
|
|
(Π5.3) |
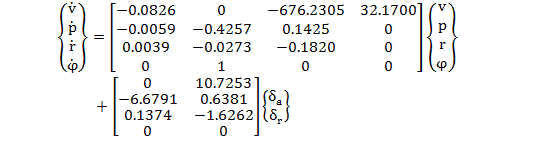
Οι αριθμητικές τιμές των στοιχείων των μητρώων στις εξισώσεις (Π5.1) και (Π5.3) έχουν στρογγυλοποιηθεί στα πέντε δεκαδικά ψηφία ώστε να μπορούν να γραφούν με ευχέρεια στο κείμενο. Αυτό δεν πρέπει να γίνεται με τις εξισώσεις που εμπλέκονται στους υπολογισμούς διότι θα δημιουργηθεί σοβαρό λάθος. Με τη χρήση του λογισμικού Matlab λαμβάνονται δύο σετ από συναρτήσεις μεταφοράς, ως προς τη γωνία εκτοπισμού των πηδαλίων κλίσης (δa - aileron) και του πηδαλίου εκτροπής (δr - rudder).
Παραγοντοποιώντας τους αριθμητές και το χαρακτηριστικό πολυώνυμο με βάση τις ρίζες τους, ως προς τα πηδάλια κλίσης:
|
|
|
(Π5.4) |
|
|
|
(Π5.5) |
|
|
|
(Π5.6) |
|
|
|
(Π5.7) |
|
|
|
(Π5.8) |
Και αντίστοιχα για το πηδάλιο εκτροπής:
|
|
|
(Π5.9) |
|
|
|
(Π5.10) |
|
|
|
(Π5.11) |
|
|
|
(Π5.12) |
|
|
|
(Π5.13) |
Η πρώτη πραγματική ρίζα περιγράφει τη μορφή του σπειροειδούς με χρονική σταθερά:
|
|
|
(Π5.14) |
Η δεύτερη πραγματική ρίζα της χαρακτηριστικής εξίσωσης περιγράφει τη μορφή υποχώρησης της περιστροφής με χρονική σταθερά:
|
|
|
(Π5.15) |
Το ζεύγος των μιγαδικών ριζών που περιγράφει την ολλανδική περιστροφή:
|
|
|
|
Ενώ τα χαρακτηριστικά της προκύπτουν:
|
|
|
|
Όπως παρατηρείται το σκάφος που εξετάζεται είναι αεροδυναμικά ευσταθές μιας και οι πραγματικές ρίζες είναι αρνητικές ενώ το ζεύγος των μιγαδικών ριζών έχει αρνητικά πραγματικά μέρη.
5.1.1. Απόκριση στα πηδάλια κλίσης
Για τη διέγερση των μορφών ευστάθειας, εφαρμόζεται είσοδος μοναδιαίου παλμού των πηδαλίων κλίσης, διάρκειας δύο δευτερολέπτων.
|
|
|
(Π5.16) |
Η δυναμική απόκριση του αεροσκάφους ως προς όλες τις μεταβλητές που αναλύθηκαν προηγουμένως παρουσιάζεται στο σχήμα Π5.1.
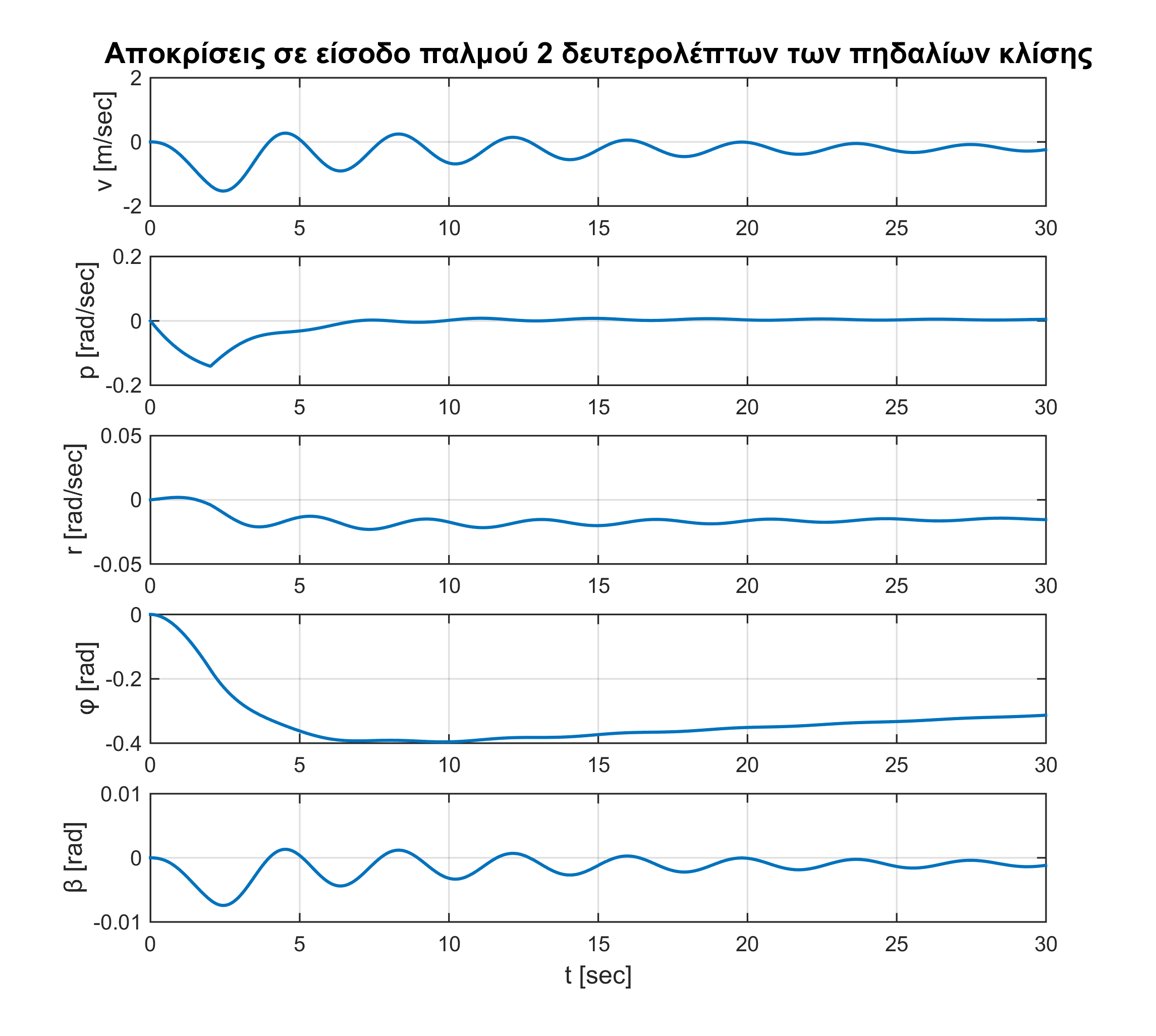
Σχήμα Π5.1 Απόκριση αεροσκάφους σε μοναδιαίο παλμό των πηδαλίων κλίσης
Εκ πρώτης όψεως η μορφή που φαίνεται ότι κυριαρχεί είναι η ολλανδική περιστροφή αφού η απόσβεσή της είναι χαμηλή. Επειδή οι μη ταλαντωτικές μορφές του σπειροειδούς και της υποχώρησης της περιστροφής δεν είναι τόσο εμφανείς και στην εγκάρσια-διεύθυνσης δυναμική υφίσταται δυναμική σύζευξη, είναι αρκετά δύσκολη η έκθεση αυτών των μορφών αναλυτικά και απαιτείται προσεκτική μελέτη των διαγραμμάτων της απόκρισης.
Τόσο η υποχώρηση της περιστροφής όσο και το σπειροειδές εμφανίζονται να συγκλίνουν εκθετικά εφόσον και τα δύο είναι ευσταθή στο παρόν παράδειγμα. Η υποχώρηση της περιστροφής, με χρονική σταθερά Tr =1.9205 sec, συγκλίνει σαφώς πολύ ταχύτερα από το σπειροειδές που έχει χρονική σταθερά Ts =84.0336 sec.
Η υποχώρηση της περιστροφής, φαίνεται πιο καθαρά στην απόκριση του ρυθμού περιστροφής p, όπου καθορίζει την εκθετική αύξηση στα 0 δευτερόλεπτα και την εκθετική επαναφορά όταν ο παλμός αφαιρεθεί στα 2 δευτερόλεπτα.
Τα χαρακτηριστικά του σπειροειδούς είναι περισσότερο νωθρά και μπορούν να παρατηρηθούν στην απόκριση της στάσης διατοιχισμού φ, όπου εκεί καθορίζει τη μεγαλύτερη χρονική διάρκεια επαναφοράς στο μηδέν (≈300 sec).
Όλες οι μεταβλητές απόκρισης που φαίνονται στο σχήμα Π5.1 τελικά μηδενίζονται στη χρονική κλίμακα του σπειροειδούς (≈250 sec) αφού το αεροσκάφος είναι ευσταθές.
5.1.2. Απόκριση στο πηδάλιο εκτροπής
Στο σχήμα Π5.2 που ακολουθεί παρουσιάζεται η απόκριση του αεροσκάφους, σε είσοδο μοναδιαίας βαθμίδας του πηδαλίου εκτροπής.
|
|
|
(Π5.17) |

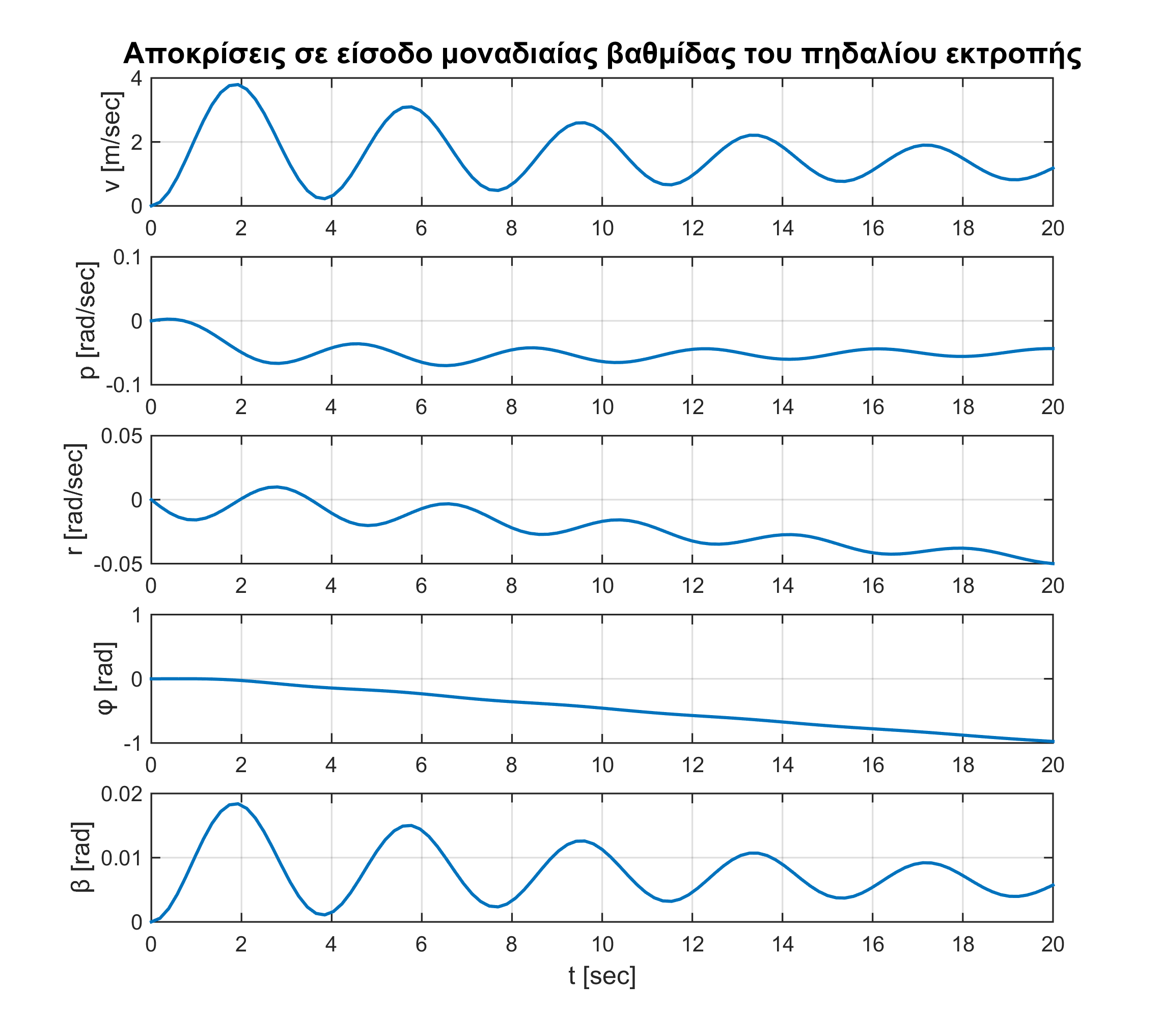
Σχήμα Π5.2 Απόκριση σε είσοδο μοναδιαίας βαθμίδας του πηδαλίου εκτροπής
Είναι ξανά εμφανές ότι η αποκρίσεις κυριαρχούνται από την ταλαντωτική μορφή της ολλανδικής περιστροφής. Όμως, η υποχώρηση της περιστροφής και το σπειροειδές είναι ακόμη πιο δυσδιάκριτα αφού εφαρμόστηκε είσοδος μοναδιαίας βαθμίδας που απλά προκαλεί την απόκλιση του αεροσκάφους από την αρχική κατάσταση ισορροπίας.
Παρατηρώντας τις συναρτήσεις μεταφοράς (Π5.4) (Π5.13) φαίνεται ότι ένας αριθμός από αυτές περιέχει αριθμητές μη ελάχιστης φάσης (μηδενιστές στο δεξί μιγαδικό ημιεπίπεδο). Η επίδρασή τους στις αποκρίσεις είναι πολύ μικρή και γενικά δεν μπορούν να ανιχνευθούν στο σχήμα Π5.2 με εξαίρεση την απόκριση του ρυθμού περιστροφής p ως προς το πηδάλιο εκτροπής. Στη συγκεκριμένη περίπτωση, η επίδραση του όρου μη ελάχιστης φάσης γίνεται αντιληπτή εξετάζοντας σε μεγέθυνση την έναρξη της απόκρισης, όπου ο ρυθμός περιστροφής φαίνεται να ξεκινά με αντίστροφο πρόσημο για περίπου ένα δευτερόλεπτο. Στην αεροναυπηγική ορολογία, το φαινόμενο αυτό ονομάζεται αντιστροφή της κλίσης (adverse roll) σε απόκριση του πηδαλίου εκτροπής.
Στο παράδειγμά εφαρμόστηκε μοναδιαία θετική είσοδος βαθμίδας στο πηδάλιο εκτροπής, που προκαλεί την εκτροπή του αεροσκάφους προς τα αριστερά, δηλαδή αρνητική απόκριση σύμφωνα με τη συμβολογία που ορίστηκε στο υποκεφάλαιο 2.1. του Κεφ.1. Τότε:
• Ο ρυθμός εκτροπής είναι επίσης αρνητικός.
• Η περιστροφή φ είναι αρνητική, όπως και ο ρυθμός περιστροφής p που προκαλείται από τη σύζευξη της περιστροφής με την εκτροπή.
• Όταν το πηδάλιο διεύθυνσης εκτρέπεται αρχικά, προκαλείται μια πλάγια δύναμη Y στο κέντρο πίεσης του κάθετου σταθερού, που με τη σειρά της προκαλεί μια ροπή εκτροπής Ν η οποία εξαναγκάζει το αεροσκάφος να στρέψει την κεφαλή του.
• Λόγω της απόστασης της εφαρμογής αυτής της δύναμης από τον άξονα οx, προκαλείται ροπή διατοιχισμού L, η οποία είναι η υπεύθυνη για την αρχική περιστροφή του αεροσκάφους αντίθετα (adverse roll) από την εφαρμογή του πηδαλίου εκτροπής.
Αυτό συμβαίνει λόγω του ότι η ροπή αδράνειας διατοιχισμού Ιx είναι λίγο μικρότερη από εκείνη ως προς την εκτροπή Iz. Έτσι, το αεροσκάφος αποκρίνεται πιο άμεσα ως προς την κλίση και ξεκινά γρηγορότερα την ανεπιθύμητη πτώση της δεξιάς πτέρυγας. Καθώς η κίνηση της εκτροπής της κεφαλής του αεροσκάφους σταθεροποιείται, η ροπή διατοιχισμού που προκαλείται από τις αεροδυναμικές δυνάμεις τελικά υπερνικά την αντίστροφη ροπή που είχε αρχικά δημιουργηθεί και το αεροσκάφος περιστρέφεται αριστερόστροφα. Αυτή η συμπεριφορά παρατηρείται χαρακτηριστικά στα περισσότερα αεροσκάφη. Το μέγεθος του φαινομένου εξαρτάται από τον τύπο του αεροσκάφους και εφόσον δεν ελεγχθεί με προσεχτική σχεδίαση στα αρχικά στάδια της δυναμικής μελέτης μπορεί να οδηγήσει σε μη αποδεκτά χαρακτηριστικά ευκολίας χειρισμού.
Ένα ανάλογο χαρακτηριστικό που ονομάζεται «ενάντια εκτροπή» (adverse yaw) σε απόκριση των πηδαλίων κλίσης, προκαλείται από τη διαφορική (differential) οπισθέλκουσα που σχετίζεται με την απόκλιση των πηδαλίων κλίσης και τη συνεπαγόμενη ροπή εκτροπής. Αυτό το χαρακτηριστικό εμφανίζεται σε πολλά αεροσκάφη. Στην περίπτωση του Learjet σε αυτές τις συνθήκες πτήσης, είναι ελάχιστη η εμφάνιση του, παρατηρώντας την έναρξη της απόκρισης του ρυθμού εκτροπής r ως προς τα πηδάλια κλίσης στο σχήμα Π5.1.
5.1.3. Ιδιοδιανυσματική ανάλυση
Σε κάθε μια από τις μεταβλητές κίνησης μπορεί να παρατηρηθούν οι μορφές της ευστάθειας από τα ιδιοδιανύσματα. Αντικαθιστώντας την πλευρική ταχύτητα v με την πλαγιολίσθηση στην εξίσωση κατάστασης (πίνακας Α του χώρου κατάστασης) προκύπτει:
|
|
|
(Π5.18) |

Οι πρώτες δύο στήλες είναι τα ιδιοδιανύσματα που αντιστοιχούν στις ρίζες της ολλανδικής περιστροφής. Η τρίτη στην υποχώρηση της περιστροφής και η τέταρτη στο σπειροειδές. Υπολογίζοντας το μέτρο κάθε στοιχείου του πίνακα V κατασκευάζεται ο ακόλουθος πίνακας:
|
|
|
(Π5.19) |
Φαίνεται και με αυτή τη μέθοδο ότι δεν είναι τόσο ξεκάθαρη η συμμετοχή των μορφών ευστάθειας στις μεταβλητές όπως στην περίπτωση της διαμήκους δυναμικής. Παρόλα αυτά παρατηρείται ότι:
• Στη γωνία πλαγιολίσθησης β και επομένως στην ταχύτητα v προφανώς κυριαρχεί η μορφή της ολλανδικής περιστροφής.
• Η μορφή της υποχώρησης της περιστροφής κυριαρχεί στον ρυθμό περιστροφής p σε σύζευξη με την ολλανδική περιστροφή.
• Στην απόκριση της περιστροφής φ το σπειροειδές είναι μεν η κυρίαρχη μορφή αλλά η επίδραση των άλλων μορφών είναι της ίδιας τάξης μεγέθους.
Αυτές οι παρατηρήσεις ταιριάζουν με τις αποκρίσεις στα σχήματα Π5.1 και Π5.2, αν και η χαμηλή απόσβεση της ολλανδικής περιστροφής γενικά επισκιάζει την εμφάνιση των άλλων μορφών για κάποιες από τις μεταβλητές. Η ανάλυση με τη μέθοδο των ιδιοδιανυσμάτων πολλές φορές αποτελεί τον πιο αποτελεσματικό τρόπο για την ερμηνεία της εγκάρσιας-διεύθυνσης δυναμικής απόκρισης σε αεροσκάφη που παρουσιάζουν υψηλή δυναμική σύζευξη των μορφών ευστάθειας.
Εφαρμόζοντας το θεώρημα της τελικής τιμής στις συναρτήσεις μεταφοράς, μπορούν να υπολογιστούν οι τιμές μόνιμης κατάστασης των μεταβλητών κίνησης για είσοδο μοναδιαίας βαθμίδας στο πηδάλιο εκτροπής. Για παράδειγμα:
|
|
|
(Π5.20) |

Έτσι, προκύπτουν οι τελικές τιμές:
|
|
|
(Π5.21) |
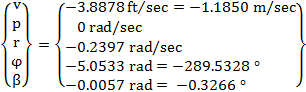
Αυτές οι τιμές παρέχουν μια ένδειξη για την ευαισθησία του αεροσκάφους στο πηδάλιο εκτροπής. Όμοια μπορούν να υπολογιστούν για είσοδο μοναδιαίας βαθμίδας στα πηδάλια κλίσης.
Ασφαλώς όμως σε τέτοιες μεγάλες γωνίες το μοντέλο των μικρών διαταραχών παύει να ισχύει και στην πραγματικότητα εμφανίζονται σημαντικές μεταβολές στις αεροδυναμικές συνθήκες λειτουργίας που θα συνοδεύουν την απόκριση. Οι πραγματικές τελικές τιμές θα είναι χωρίς αμφιβολία διαφορετικές ενώ μπορούν να επιβεβαιωθούν μαθηματικά μόνο από κάποιο μη γραμμικό μοντέλο εξομοίωσης (simulation). Οπότε γίνονται προφανείς οι περιορισμοί του μοντέλου των μικρών διαταραχών που χρησιμοποιείται στην εγκάρσια-διεύθυνσης δυναμική απόκριση του αεροσκάφους και υπογραμμίζεται η απαιτούμενη προσοχή που πρέπει να επιδεικνύεται κατά την ερμηνεία του.
5.1.4. Μοντέλα μειωμένης τάξης
Η χαρακτηριστική εξίσωση του πλήρους μοντέλου προέκυψε:
|
|
|
(Π5.22) |
Σε αντιστοιχία με την έκφραση που δίνεται από την εξίσωση (5.21) οι προσεγγιστικές τιμές για τις χρονικές σταθερές της μορφής υποχώρησης της περιστροφής και του σπειροειδούς:
|
|
|
(Π5.23) |
Η κατά προσέγγιση τιμή για τη χρονική σταθερά της μορφής της υποχώρησης της περιστροφής έχει κάποια μικρή απόκλιση από την ακριβή τιμή των 1.9205 sec, ενώ η προσεγγιστική χρονική σταθερά για το σπειροειδές είναι πολύ κοντά στην ακριβή τιμή των 84.0336 sec.
Ο προσεγγιστική συνάρτηση μεταφοράς για τον ρυθμό περιστροφής σε
σχέση με τα πηδάλια κλίσης που δίνεται από την (Π5.24) μπορεί να εκτιμηθεί
λαμβάνοντας τις τιμές για τις συντετμημένες παραγώγους ευστάθειας lp και ![]() από
τα δεδομένα του παραδείγματος:
από
τα δεδομένα του παραδείγματος:
|
|
|
(Π5.24) |
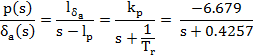
Από την εξίσωση (Π5.24) η προσεγγιστική τιμή για τη χρονική σταθερά της μορφής της υποχώρησης της περιστροφής:
|
|
|
(Π5.25) |
Αυτή η χρονική σταθερά είναι πιο κοντά στην τιμή που δίνει το πλήρες μοντέλο, σαφώς όμως υπάρχει και πάλι κάποια απόκλιση. Η βραχυπρόθεσμη απόκριση του ρυθμού περιστροφής p του αεροσκάφους Learjet 24, σε μοναδιαία είσοδο βαθμίδας των πηδαλίων κλίσης, φαίνεται στο σχήμα Π5.3, όπου γίνεται σύγκριση με την απόκριση του πλήρους μοντέλου.
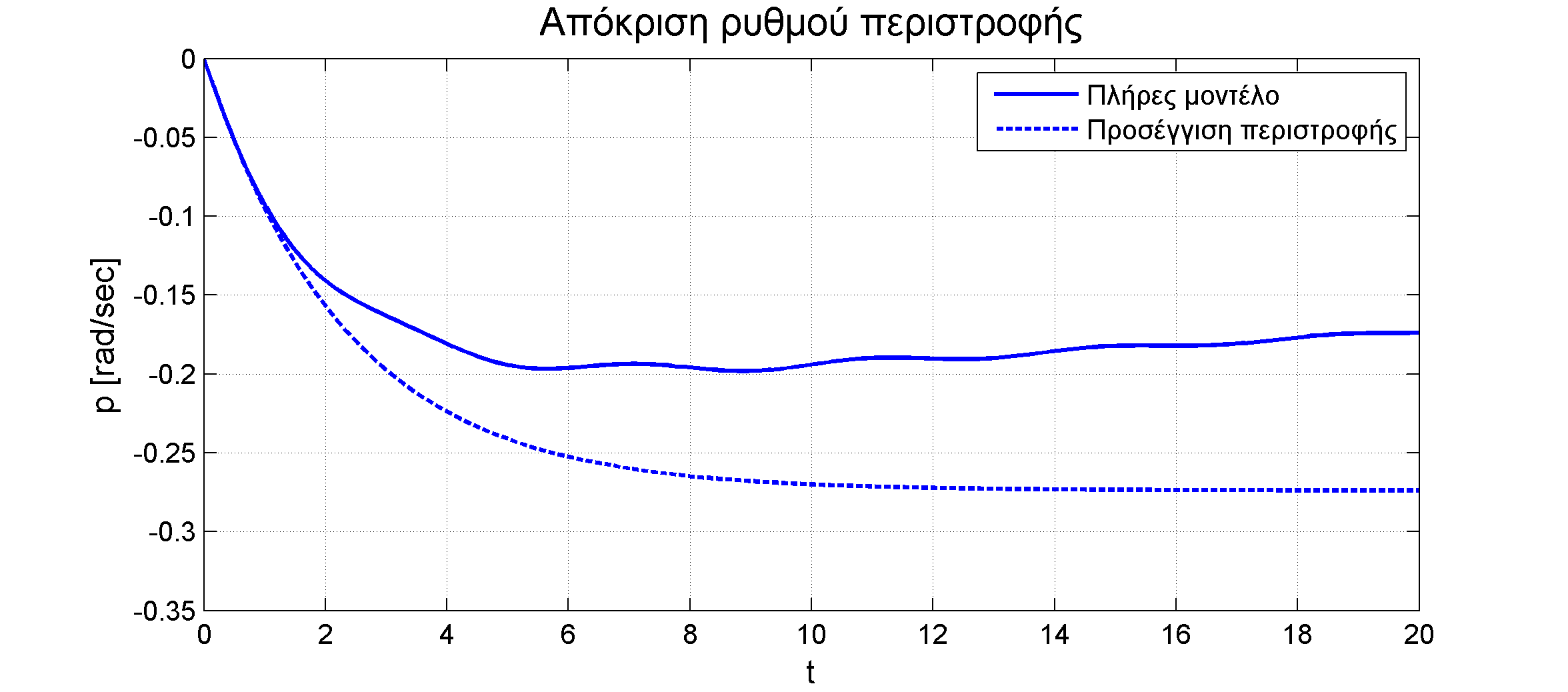
ΣχήμαΠ5.3 Απόκριση γωνιακής ταχύτητας περιστροφής
Φαίνεται λοιπόν ότι για τα πρώτα δύο σχεδόν δευτερόλεπτα η ταύτιση των δύο διαγραμμάτων είναι εξαιρετική, κάτι που επιβεβαιώνει την υπόθεση με την οποία προέκυψε το προσεγγιστικό μοντέλο για την υποχώρηση της περιστροφής. Η προσεγγιστική τιμή της χρονικής σταθεράς, που υπολογίζεται με την αντικατάσταση των κατάλληλων παραγώγων ευστάθειας και ροπών αδρανείας διατοιχισμού στην έκφραση που δίνεται από την εξίσωση (Π5.15), είναι σχεδόν η ίδια με την τιμή που δίνεται από την εξίσωση (Π5.25). Αυτό επιβεβαιώνει την εγκυρότητα των υποθέσεων που έγιναν κάνει κατά την κατάστρωση του μοντέλου.
Η προσέγγιση της χρονικής σταθεράς του σπειροειδούς, μπορεί να γραφεί ως προς τις συντετμημένες παραγώγους ευστάθειας:
|
|
|
(Π5.26) |
Βέβαια αυτή η τιμή έχει κάποια απόκλιση από την ακριβή τιμή των 84.0336 sec. Αυτό όμως δεν είναι τόσο σημαντικό μιας και το σπειροειδές έχει πολύ αργή εξέλιξη συγκριτικά με τις τυπικές δραστηριότητες που αφορούν τον χειρισμό του αεροσκάφους. Η κλασσική απαίτηση για την ευστάθεια του σπειροειδούς η οποία δίνεται από την ανισότητα της σχέσης (5.39) ικανοποιείται:
|
|
|
|
Παρατηρείται η ομοιότητα αυτών των τιμών, κάτι που υπονοεί ότι η μορφή αυτή προσεγγίζει στο να είναι ουδέτερα ευσταθής στη χρονική κλίμακα της κανονικής μεταβατικής απόκρισης. Αυτή η παρατήρηση είναι τυπική για ένα συμβατικό αεροσκάφος όπως Learjet 24.
Προσεγγίσεις για τον λόγο απόσβεσης και τη φυσική συχνότητα χωρίς απόσβεση της ολλανδικής περιστροφής λαμβάνονται με αντικατάσταση των αντίστοιχων τιμών για τις συντετμημένες παραγώγους ευστάθειας στις εκφράσεις που δίνονται από τις εξισώσεις (5.47):
|
|
|
|
Η προσέγγιση για τη φυσική συχνότητα συγκρίνεται άνετα με την ακριβή τιμή που είναι 1.6413 rad/s. Δεν συμβαίνει όμως το ίδιο για την τιμή του λόγου απόσβεσης.
5.1.5. Απόκριση Συχνότητας
Στη συνέχεια εξετάζεται η απόκριση συχνότητας του αεροσκάφους Learjet 24. Ο συνολικός αριθμός των διαγραμμάτων Bode που πρέπει να εξεταστούν είναι δέκα ενώ οι αντίστοιχες συναρτήσεις μεταφοράς δίνονται από τις σχέσεις (Π5.27) και (Π5.28). Οι ουσιώδεις πληροφορίες βέβαια είναι δυνατό να ληφθούν από ένα μικρότερο αριθμό συναρτήσεων μεταφοράς, έξι για το συγκεκριμένο παράδειγμα.
Συγκεκριμένα, επαναλαμβάνονται οι εξής από τις συναρτήσεις μεταφοράς (Π5.4)-(Π5.13) που αναφέρονται στους άξονες του ανέμου:
|
|
|
|
|
|
|
(Π5.27) |
|
|
|
|
και
|
|
|
|
|
|
|
(Π5.28) |
|
|
|
|
Στο σχήμα Π5.4 παρουσιάζονται τα διαγράμματα Bode των ΣΜ ως προς τα πηδάλια κλίσης, ενώ με κόκκινη διακεκομμένη γραμμή σημειώνεται η συχνότητα της ολλανδικής περιστροφής.
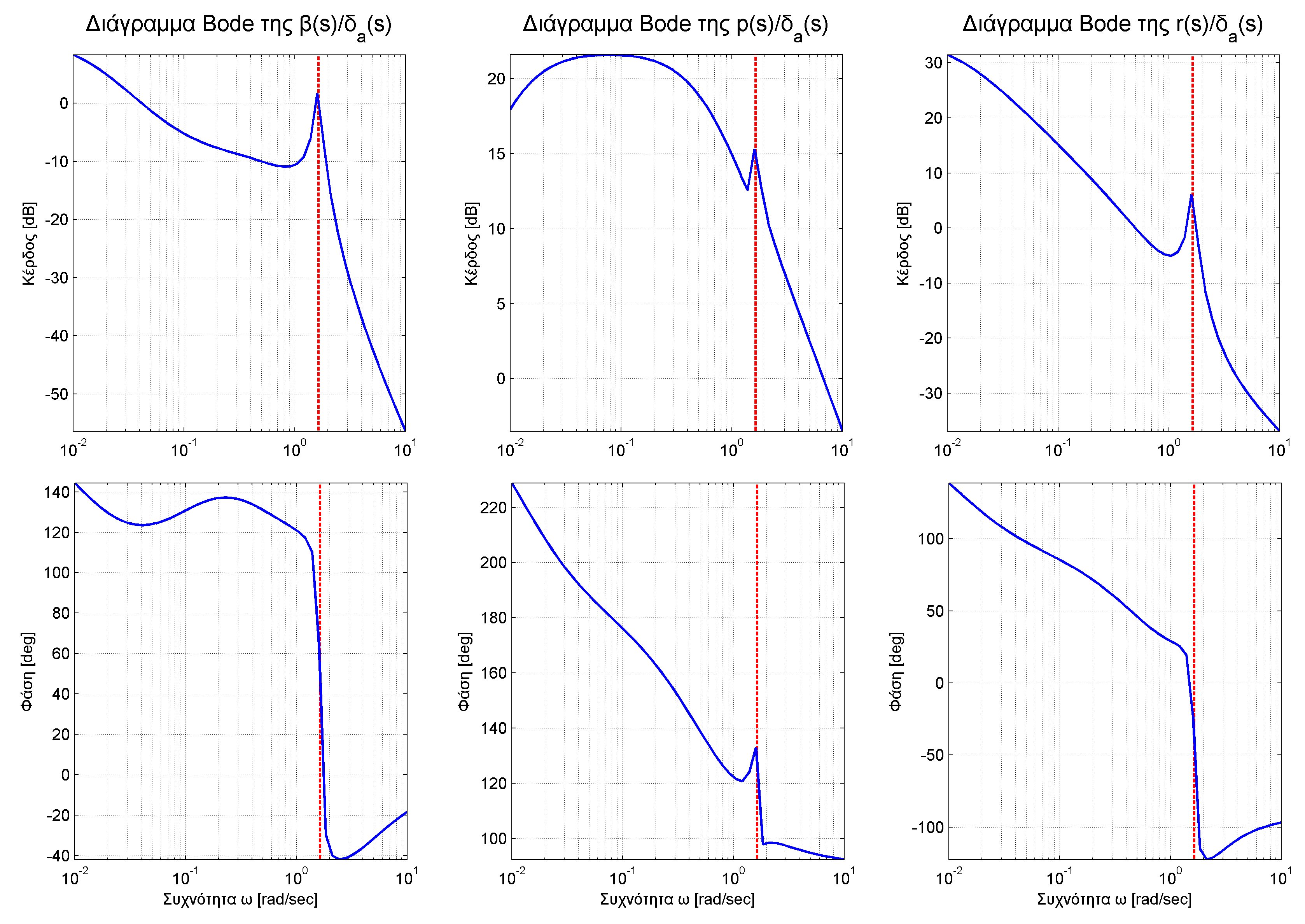
Σχήμα Π5.4 Διαγράμματα Bode ως προς τα πηδάλια κλίσης
Στο σχήμα Π5.5 παρουσιάζονται τα διαγράμματα Bode των ΣΜ ως προς το πηδάλιο εκτροπής, ενώ όπως προηγουμένως, με κόκκινη διακεκομμένη γραμμή σημειώνεται η συχνότητα της ολλανδικής περιστροφής.
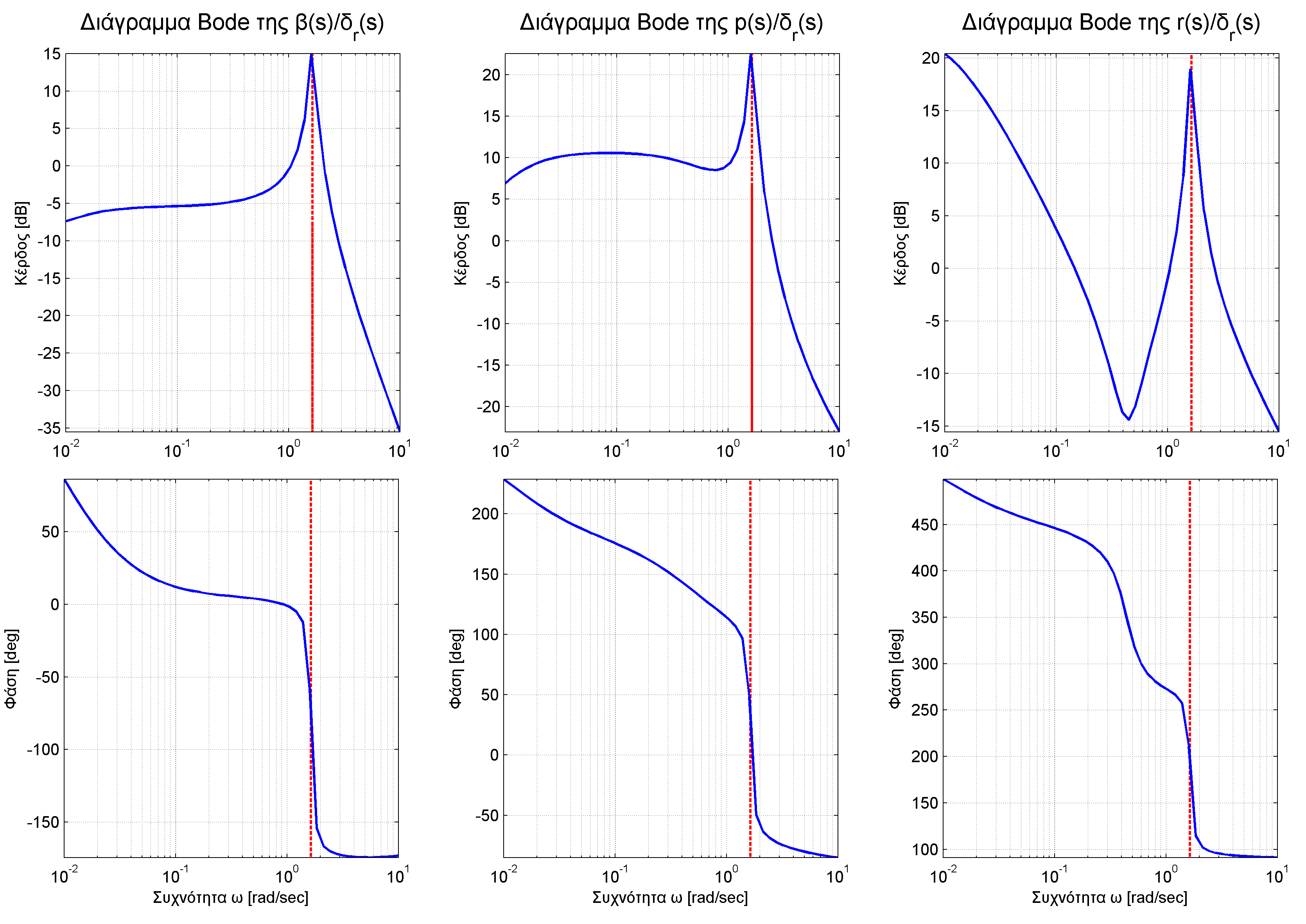
Σχήμα Π5.5 Διαγράμματα Bode ως προς το πηδάλιο εκτροπής
Όπως αναλύεται και στο παράρτημα Β.2.4., τα διαγράμματα Bode παρουσιάζουν την απόκριση μόνιμης κατάστασης t → ∞ ενός συστήματος το οποίο έχει ημιτονοειδή είσοδο σταθερού εύρους και της οποίας η συχνότητα μπορεί να μεταβάλλεται σε κάποια περιοχή.
Γενικά μπορεί να σχολιαστεί ότι:
• Για χαμηλή απόσβεση η καμπύλη του κέρδους παρουσιάζει απότομο μέγιστο στη συχνότητα θλάσης. Εφόσον, όπως προέκυψε και από την ιδιοδιανυσματική ανάλυση, η ολλανδική περιστροφή είναι η κυρίαρχη μορφή σχεδόν σε όλες τις αποκρίσεις και έχει πολύ χαμηλή σταθερά απόσβεσης, είναι αναμενόμενα τα μέγιστα που παρουσιάζονται στη συχνότητά της.
• Όσον αφορά την καμπύλη της φάσης όταν η απόσβεση είναι χαμηλή, παρουσιάζεται έντονη κλίση στην περιοχή της συχνότητα θλάσης η οποία αποτελεί και σημείο καμπής. Αυτό επιβεβαιώνεται από τα διαγράμματα και οφείλεται στην ολλανδική περιστροφή, για τους προαναφερθέντες λόγους.
• Όταν ένα ζεύγος μιγαδικών πόλων ή μηδενιστών βρίσκεται κοντά στον φανταστικό άξονα παρουσιάζεται χαρακτηριστικό μέγιστο ή ελάχιστο στην καμπύλη του κέρδους με έντονη κλίση της καμπύλης φάσης στη συχνότητα θλάσης. Αυτό όντως ισχύει για τις ρίζες της κυρίαρχης ολλανδικής περιστροφής και παρατηρείται στα διαγράμματα.
• Μηδενιστής στο δεξί μιγαδικό ημιεπίπεδο, συνεπάγεται ελάχιστο στην καμπύλη του κέρδους και μείωση της φάσης κατά ≈180°. Αυτό ισχύει για τις ΣΜ του ρυθμού εκτροπής r ως προς τα πηδάλια κλίσης και το πηδάλιο εκτροπής και τη ΣΜ του ρυθμού περιστροφής p ως προς το πηδάλιο εκτροπής ενώ είναι εμφανές στα αντίστοιχα διαγράμματα.
• Το κέρδος είναι ανάλογο της ευαισθησία της απόκρισης στην εντολή εισόδου. Στα διαγράμματα για τα πηδάλια κλίσης, η πιο ευαίσθητη μεταβλητή είναι σαφώς ο ρυθμός περιστροφής p, ενώ στα διαγράμματα του πηδαλίου εκτροπής και οι τρείς μεταβλητές παρουσιάζουν παρόμοια ευαισθησία. Το αρνητικό κέρδος σε μια περιοχή συχνοτήτων για τον ρυθμό εκτροπής σημαίνει ότι αλλάζει το πρόσημο της απόκρισης και είναι ενδεικτικό της περιορισμένης ισχύος του μοντέλου που χρησιμοποιείται.
6: ΑΕΡΟΔΥΝΑΜΙΚΕΣ ΠΑΡΑΓΩΓΟΙ ΕΥΣΤΑΘΕΙΑΣ ΚΑΙ ΕΛΕΓΧΟΥ
Σύνοψη
Το κεφάλαιο πραγματεύεται την έννοια και την ανάλυση των παραγώγων ευστάθειας που εμπλέκονται στη διαμήκη και στην εγκάρσια δυναμική. Η ουσιαστική τους σημασία είναι ότι αποδίδουν την ευαισθησία των αεροδυναμικών δυνάμεων σε διαταραχές των κινηματικών μεγεθών του αεροσκάφους.
Προαπαιτούμενη γνώση
Απαιτείται ένα βασικό υπόβαθρο αεροδυναμικής και δομής του αεροσκάφους, το σημαντικότερο μέρος του οποίου συνοψίζεται στα κεφάλαια 1 και 2.
1. Εισαγωγή
Το σημαντικότερο ίσως ζήτημα στη μελέτη της δυναμικής πτήσης είναι η αναγνώριση και η ποσοτική περιγραφή της αεροδυναμικής συμπεριφοράς του αεροσκάφους ώστε να ενσωματωθεί στις εξισώσεις κίνησης. Η αεροδυναμική μοντελοποίηση αφορά ακριβώς στην εξέλιξη μαθηματικών μοντέλων που κατ’ αρχήν θα περιγράφουν τις αεροδυναμικές δυνάμεις και ροπές που επιδρούν στο σκάφος. Επειδή το πεδίο ροής γύρω από το αεροσκάφος είναι εξαιρετικά πολύπλοκο, κάθε μορφής μαθηματική περιγραφή των αεροδυναμικών φαινομένων εισάγει απλοποιήσεις, ενώ παράλληλα πρέπει οδηγεί στη μεγαλύτερη δυνατή ακρίβεια.
Ακόμη και αν υπάρχουν ακριβή μαθηματικά μοντέλα, η χρήση τους στις εξισώσεις κίνησης είναι πολύπλοκη, έτσι, συχνά προτιμώνται απλούστερα μαθηματικά μοντέλα που παρέχουν ένα ικανοποιητικό βαθμό ακρίβειας. Συνέπεια αυτής της επιλογής είναι ότι τα μοντέλα αυτά - επομένως και οι λύσεις που προκύπτουν από την εφαρμογή τους στις εξισώσεις κίνησης - είναι σχετικά ακριβή μόνο για ένα περιορισμένο πλαίσιο συνθηκών πτήσης. Εφόσον απαιτείται η διερεύνηση της δυναμικής συμπεριφοράς τους αεροσκάφους σε ολόκληρο τον φάκελο πτήσης, επαναλαμβάνονται οι προηγούμενοι υπολογισμοί και στα υπόλοιπα σημεία του φακέλου.
Το απλούστερο και συνηθέστερο μοντέλο χρησιμοποιεί τις αεροδυναμικές παραγώγους ευστάθειας και ελέγχου, οι οποίες καταγράφονται στο [12], οι οποίες είναι και το μέσο με το οποίο συσχετίζονται τα δυναμικά χαρακτηριστικά του αεροσκάφους με τις κυρίαρχες αεροδυναμικές ιδιότητες.
2. Ψευδοστατικές παράγωγοι ευστάθειας
Με σκοπό την κατανόηση της έννοιας και της σημασίας των παραγώγων ευστάθειας, θεωρείται ως παράδειγμα η παράγωγος που εκφράζει τη μεταβολή στην κάθετη δύναμη, λόγω διαταραχής του ρυθμού πρόνευσης του αεροσκάφους. Με βάση τους ορισμούς των εξισώσεων (3.37), (3.38), (3.39) αυτή ορίζεται ως:
|
|
|
(6.1) |
Η συνιστώσα της κάθετης δύναμης που προκύπτει από τη διαταραχή της ταχύτητας πρόνευσης προκύπτει με ολοκλήρωση της σχέσης (6.1):
|
|
|
(6.2) |
Γενικά, η διαταραχή κατά την πτήση που προκάλεσε τη μεταβολή στον ρυθμό πρόνευσης, είναι φυσικό να προκαλέσει ανάλογες μεταβολές και σε άλλες κινηματικές μεταβλητές - που με τη σειρά τους θα προκαλέσουν μεταβολές και σε άλλες συνιστώσες της κάθετης δύναμης Ζ, όπως αυτές έχουν περιγραφεί με σχέσεις της μορφής (3.37),(3.38),(3.39).
Οι εξισώσεις κίνησης, όπως έχουν ήδη περιγραφεί με τη σχέση (3.51), περιγράφουν εξ’ ορισμού μικρές διαταραχές γύρω από μια θέση αντισταθμισμένης ισορροπίας. Ο σκοπός αυτής της υπόμνησης είναι ακριβώς να τονίσει ότι στην ανάλυση που επιχειρείται, οι παράγωγοι ευστάθειας προσδιορίζουν την κίνηση του αεροσκάφους μόνο όταν εκείνο βρίσκεται στην κατάσταση «δυναμικής διαταραχής» σε σχέση με την αρχική κατάσταση ισορροπίας. Για την ακριβή ανάλυση δηλαδή, θα έπρεπε οι παράγωγοι ευστάθειας να εκφραστούν συναρτήσει των μη μόνιμων αεροδυναμικών συνθηκών που επικρατούν στην κατάσταση δυναμικής διαταραχής που προσπαθούν να ποσοτικοποιήσουν, κάτι εξαιρετικά πολύπλοκο. Αφού λοιπόν η κίνηση που εξετάζεται είναι εξ’ ορισμού περιορισμένη, μπορεί να ληφθεί το όριο στο οποίο τείνει η δυναμική κατάσταση διαταραχής όταν οι διαταραχές τείνουν στο μηδέν και το οποίο είναι η κατάσταση αντισταθμισμένης ισορροπίας. Είναι λοιπόν κοινή πρακτική, ο προσδιορισμός των αεροδυναμικών παραγώγων ευστάθειας να γίνεται στην κατάσταση αντισταθμισμένης ισορροπίας και στη συνέχεια να λαμβάνεται η υπόθεση ότι ο υπολογισμός εφαρμόζεται στη μικρή διαταραγμένη κίνηση γύρω από αυτήν τη θέση αντισταθμισμένης ισορροπίας.
Αυτή η μέθοδος, καταλήγει στον προσδιορισμό των ψευδοστατικών παραγώγων ευστάθειας, δηλαδή σε ποσότητες που βασίζονται και προκύπτουν από μόνιμες αεροδυναμικές συνθήκες, αλλά τελικά χρησιμοποιούνται στην περιγραφή δυναμικά μεταβλητών, αεροδυναμικών συνθηκών.
Στο υποκεφάλαιο 2.3. του κεφ.3, μία εκ των παραδοχών είναι ότι η ταχύτητα του αεροσκάφους είναι σημαντικά μικρότερη της ταχύτητας του ήχου, έτσι ώστε ο αέρας να θεωρείται ασυμπίεστος και οι διαταραχές να διαδίδονται ακαριαία επάνω στο αεροσκάφος. Ο Blakelock [8], την ονομάζει ως την παραδοχή της «ψευδοστατικής ροής» (“quasi-steady flow”). Στην πραγματικότητα, η διάδοση των διαταραχών δεν είναι άμεση, καθώς επηρεάζεται από την επίδραση της «φαινόμενης μάζας», δηλαδή τη μάζα του αέρα που επιταχύνεται σε κάθε διαταραχή κίνησης του αεροσκάφους.
Για τον λόγο αυτό, αν και οι παράγωγοι ευστάθειας που προκύπτουν με αυτόν τον τρόπο παρέχουν ικανοποιητικά αποτελέσματα για τη δυναμική μελέτη μικρών διαταραχών, όταν το εύρος της κίνησης μεγαλώνει, τα αποτελέσματα που προκύπτουν γίνονται ανεπαρκή και μάλιστα με αυξανόμενο ρυθμό. Έτσι, η δυναμική μελέτη διαταραχών μεγάλου εύρους απαιτεί εξαιρετικά πολύπλοκες μεθόδους αεροδυναμικής ανάλυσης, αριθμητικές ή πειραματικές. Μια βαθύτερη εισαγωγή στην έννοια των παραγώγων ευστάθειας προκύπτει αναλύοντας την επίδραση της αεροδυναμικής οπισθέλκουσας D, στην αξονική δύναμη X κατά τη διαταραχή, όπως παρατίθεται στο [3]. Εφόσον το σωματόδετο σύστημα αξόνων είναι σύστημα ανέμου, τότε:
|
|
|
(6.3) |
Στο σχήμα 6.1, απεικονίζεται ένα τυπικό παράδειγμα του διαγράμματος οπισθέλκουσας-ταχύτητας.
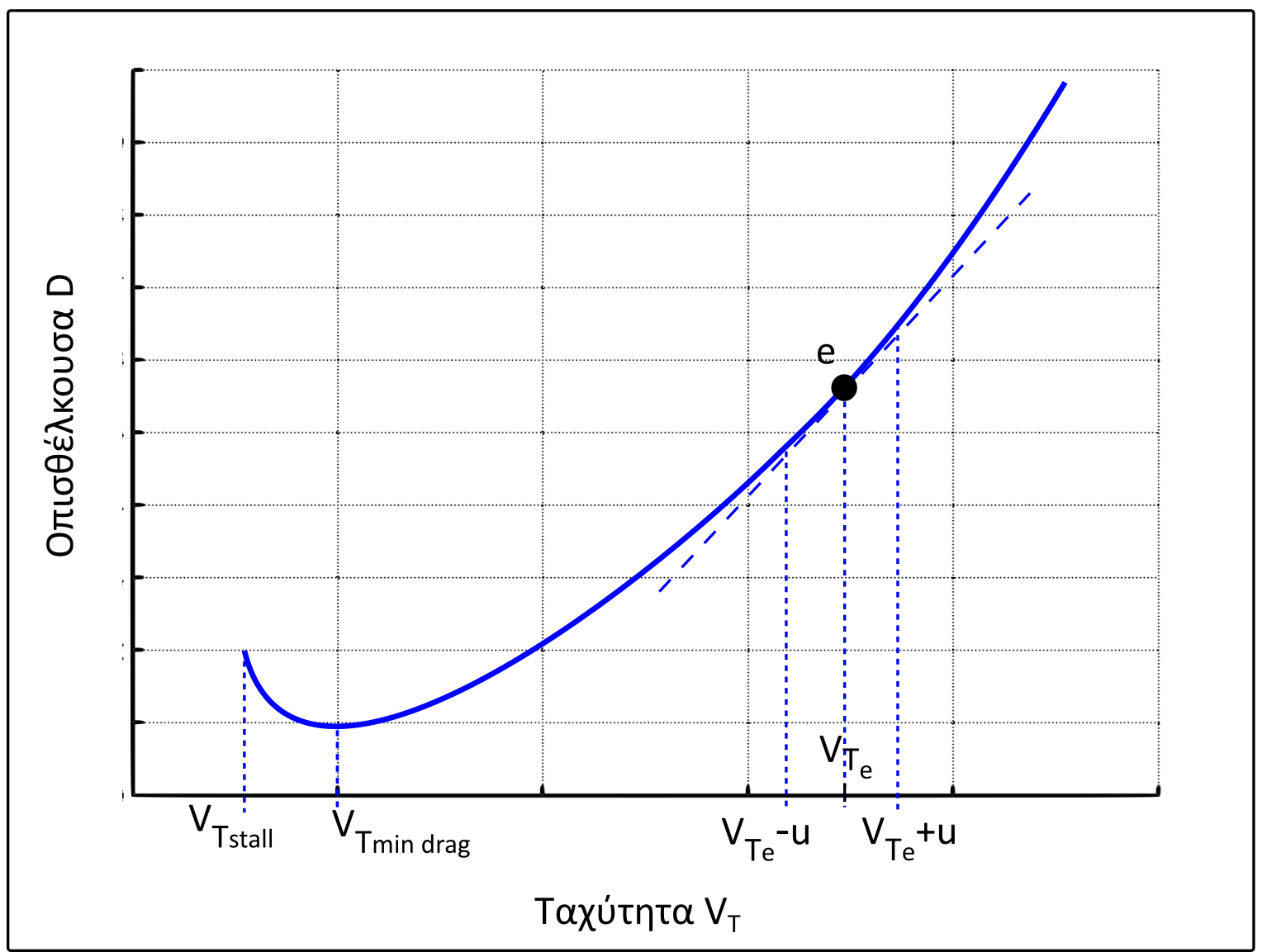
Σχήμα 6.1 Η έννοια της παραγώγου ευστάθειας ![]() σαν
την τοπική κλίση (παράγωγο) της καμπύλης του συντελεστή αντίστασης στο σημείο
αντισταθμισμένης ισορροπίας.
σαν
την τοπική κλίση (παράγωγο) της καμπύλης του συντελεστή αντίστασης στο σημείο
αντισταθμισμένης ισορροπίας.
Με ![]() =
Ue, συμβολίζεται η ταχύτητα του αεροσκάφους
στην κατάσταση αντισταθμισμένης ισορροπίας στις συνθήκες πτήσης που ενδιαφέρουν
και που ορίζονται από το σημείο e (equilibrium) πάνω στο διάγραμμα. Αν μετά από κάποια ανατάραξη,
εμφανιστεί μια διαταραχή ± u στην ταχύτητα του αεροσκάφους γύρω από το σημείο
ισορροπίας, μπορεί να ορισθεί η παράγωγος της μεταβολής της αξονικής δύναμης Χ
λόγω της μεταβολής της ταχύτητας:
=
Ue, συμβολίζεται η ταχύτητα του αεροσκάφους
στην κατάσταση αντισταθμισμένης ισορροπίας στις συνθήκες πτήσης που ενδιαφέρουν
και που ορίζονται από το σημείο e (equilibrium) πάνω στο διάγραμμα. Αν μετά από κάποια ανατάραξη,
εμφανιστεί μια διαταραχή ± u στην ταχύτητα του αεροσκάφους γύρω από το σημείο
ισορροπίας, μπορεί να ορισθεί η παράγωγος της μεταβολής της αξονικής δύναμης Χ
λόγω της μεταβολής της ταχύτητας:
|
|
|
(6.4) |
όπου συνολική ταχύτητα της διαταραχής κατά μήκος του άξονα x θα
δίνεται ως ![]() ,
οπότε :
,
οπότε :
|
|
|
(6.5) |
Η κλίση λοιπόν του διαγράμματος ταχύτητας - οπισθέλκουσας στο
σημείο e ορίζει την ψευδοστατική
τιμή της παραγώγου ![]() στη
συνθήκη πτήσης που αντιστοιχεί στην ταχύτητα αντιστάθμισης
στη
συνθήκη πτήσης που αντιστοιχεί στην ταχύτητα αντιστάθμισης ![]() .
.
Από το σημείο αυτό και ύστερα είναι δυνατή η περαιτέρω ανάλυση με τις γνώσεις αεροδυναμικής του κεφαλαίου 1. Επειδή δηλαδή:
|
|
|
(6.6) |
και υποθέτοντας επιπλέον ότι η πυκνότητα παραμένει σταθερή, καθώς η διαταραχή είναι μικρή:
|
|
|
(6.7) |
Για τον καθορισμό της παραγώγου στις υφιστάμενες συνθήκες πτήσης,
δεν χρειάζεται τίποτε επιπλέον, παρά το να θεωρηθεί η διαταραχή απειροστά μικρή,
έτσι ώστε, u→0 και επομένως η V→![]() .Τότε,
από τις εξισώσεις (6.5) και (6.7) προκύπτει:
.Τότε,
από τις εξισώσεις (6.5) και (6.7) προκύπτει:
|
|
|
(6.8) |
όπου οι τιμές για τα ![]() και
CD υπολογίζονται στην κατάσταση αντισταθμισμένης ισορροπίας e με βάση τις τιμές της
και
CD υπολογίζονται στην κατάσταση αντισταθμισμένης ισορροπίας e με βάση τις τιμές της ![]() .
.
O καθορισμός των
παραγώγων ευστάθειας, ουσιαστικά πραγματοποιείται από τη γραμμικοποίηση των
αεροδυναμικών ιδιοτήτων και σχέσεων που διέπουν το φαινόμενο γύρω από το σημείο
ισορροπίας, κάτι που προκύπτει από το γεγονός ότι η διαταραχή είναι μικρή.
Ακολουθώντας την ίδια τακτική, μπορούν να ληφθούν ανάλογες σχέσεις και για τις
υπόλοιπες παραγώγους ευστάθειας, αν και οι αεροδυναμικές ιδιότητες που διέπουν
το φαινόμενο δεν οδηγούν πάντοτε σε τέτοιους απλούς υπολογισμούς. Επίσης,
πρέπει να σημειωθεί ότι στους παραπάνω υπολογισμούς η ![]() μεταβάλλεται
σε σχέση με την ταχύτητα. Γενικά οι περισσότερες παράγωγοι μεταβάλλονται με την
ταχύτητα ή τον αριθμό Mach, το ύψος και τη γωνία
πρόσπτωσης. Κάποιες φορές δε, πολλές παράγωγοι μεταβάλλονται απότομα και σε
μεγάλο βαθμό σε ολόκληρο τον φάκελο πτήσης και ειδικά στη διηχητική περιοχή.
μεταβάλλεται
σε σχέση με την ταχύτητα. Γενικά οι περισσότερες παράγωγοι μεταβάλλονται με την
ταχύτητα ή τον αριθμό Mach, το ύψος και τη γωνία
πρόσπτωσης. Κάποιες φορές δε, πολλές παράγωγοι μεταβάλλονται απότομα και σε
μεγάλο βαθμό σε ολόκληρο τον φάκελο πτήσης και ειδικά στη διηχητική περιοχή.
Για τον υπολογισμό των αεροδυναμικών παραγώγων ευστάθειας μπορεί να χρησιμοποιηθεί ένας μεγάλος αριθμός μεθόδων, με διαφορετικούς βαθμούς ακρίβειας στις προσεγγίσεις των πραγματικών τιμών, όπως εμπειρικές, ημιεμπειρικές, υπολογιστικές και πειραματικές. Γενικά προκύπτει μεγαλύτερη ακρίβεια για τις διαμήκεις παραγώγους ευστάθειας παρά για τις αντίστοιχες της εγκάρσιας-διεύθυνσης δυναμικής.
Η πρώτη κατηγορία μεθόδων, περιλαμβάνει τη χρήση μαθηματικών σχέσεων και μοντέλων των αεροδυναμικών ιδιοτήτων του αεροσκάφους. Το μεγάλο πλεονέκτημά τους, έγκειται στο γεγονός ότι επειδή η κατασκευή των μοντέλων αυτών απαιτεί πολύ καλή φυσική κατανόηση των βασικών φυσικών αρχών της αεροδυναμικής, οι σχέσεις που προκύπτουν αποτελούν ένα πολύ καλό μέσο για την κατανόηση των τρόπων με τους οποίους οι βασικές αεροδυναμικές ιδιότητες επηρεάζουν τη δυναμική του αεροσκάφους.
Σε πρώτη προσέγγιση, χρησιμοποιούνται κλειστές αναλυτικές εκφράσεις με βάση ημιεμπειρικά μοντέλα για τις παραγώγους ευστάθειας και είναι συνήθως η απλούστερη και η λιγότερο ακριβής μέθοδος, ειδικά για τις εγκάρσιες παραγώγους ευστάθειας. Η χρήση τους απαιτεί ένα ελάχιστο βασικό επίπεδο γνώσεων της γεωμετρίας και της αεροδυναμικής του σώματος. Τυπικό παράδειγμα τέτοιας προσέγγισης, αποτελεί η έκφραση (6.8), καθώς και η πορεία υπολογισμού της. Οι εκφράσεις αυτές υποστηρίζονται από την εμπειρία που έχει συλλεχθεί από τα πρώτα χρόνια της αεροπορίας έως σήμερα, και η οποία έχει οδηγήσει σε τροποποιήσεις με βάση αεροδυναμικά πειραματικά δεδομένα τα οποία έχουν συγκεντρωθεί με την πάροδο των ετών.
Σε δεύτερο επίπεδο, μπορούν να χρησιμοποιηθούν σύνθετες θεωρητικές-αριθμητικές μέθοδοι υπολογισμού του πεδίου ροής γύρω από το αεροσκάφος με σημαντικότερο όμως υπολογιστικό κόστος. Με τη χρήση τέτοιων μεθόδων οι παράγωγοι ευστάθειας μπορούν σήμερα να υπολογισθούν με εξαιρετική ακρίβεια, ειδικά για συμβατικές διαμορφώσεις αεροσκαφών.
Η δεύτερη κατηγορία μεθόδων αφορά στις δοκιμές στην αεροσήραγγα. Εδώ ένα μοντέλο του αεροσκάφους τοποθετείται σ’ ένα ζυγό ακριβείας, όπου μετρούνται οι έξι συνιστώσες των δυνάμεων και των ροπών για διαφορετικούς συνδυασμούς της ταχύτητας, της γωνίας πρόσπτωσης, της γωνίας εκτροπής και των γωνιών των επιφανειών ελέγχου. Η βασική ιδιότητα αυτών των δοκιμών είναι ότι οι συνθήκες είναι στατικές, όμως υπάρχουν και μέθοδοι όπου λαμβάνονται αποτελέσματα και για μη στατικές συνθήκες. Με την προϋπόθεση ότι οι δοκιμές είναι σχεδιασμένες και εκτελεσμένες προσεκτικά, μπορούν να ληφθούν ικανοποιητικές προσεγγίσεις, ειδικά για τις παραγώγους δύναμης-ταχύτητας και ροπής-ταχύτητας. Προβλήματα ακρίβειας εμφανίζονται λόγω κλίμακας, ειδικά στην εξομοίωση για δύσκολες συνθήκες πτήσης. Όταν κάποιες από τις παραγώγους προκύπτουν ανακριβείς, είναι πολύ δύσκολο να σχεδιαστούν άλλες δοκιμές που να καταλήγουν σε ακριβή αποτελέσματα όλων των παραγώγων. Παρ’ όλα αυτά, επειδή τα αποτελέσματα αφορούν πραγματική ροή, οι τιμές που λαμβάνονται παρέχουν μεγαλύτερη πιστότητα σε σχέση με τις υπολογιστικές μεθόδους.
Η τρίτη, τέλος, κατηγορία μεθόδων αφορά στις πτητικές δοκιμές (flight tests). Πρόκειται για μια παγιωμένη πρακτική, όπου οι παράγωγοι ευστάθειας προκύπτουν με έμμεσο τρόπο, μιας και δεν είναι δυνατό να μετρηθούν οι πραγματικές δυνάμεις που επιδρούν πάνω στο αεροσκάφος. Επίσης, επειδή το αεροσκάφος έχει έξι βαθμούς ελευθερίας, είναι ιδιαίτερα δύσκολο να δημιουργηθεί μεμονωμένη διαταραχή της μεταβλητής κίνησης χωρίς να επηρεασθεί κάποια από τις υπόλοιπες. Ενώ κάποιες παράγωγοι υπολογίζονται με ευκολία, κάποιες άλλες είναι εξαιρετικά δύσκολο να υπολογιστούν.
Σήμερα στις δοκιμαστικές πτήσεις χρησιμοποιείται κυρίως η μέθοδος της ταυτοποίησης παραμέτρων (parameter identification). Πρόκειται για μια μαθηματική διαδικασία, κατά την οποία γίνεται ευρεία χρήση υπολογιστικών εργαλείων με σκοπό τον καθορισμό εκείνης της περιγραφής του αεροσκάφους στον χώρο κατάστασης, η οποία ταιριάζει καλύτερα στην απόκριση εισόδου-εξόδου που μετρήθηκε στην πτήση. Τα αποτελέσματα που προκύπτουν από τη μέθοδο είναι οι συντελεστές της εξίσωσης του αεροσκάφους στον χώρο κατάστασης, από την οποία τελικά προκύπτουν οι αεροδυναμικές παράγωγοι ευστάθειας. Η μέθοδος είναι πολύπλοκη και η επιτυχία εξαρτάται σε ένα μεγάλο βαθμό από τη σωστή επιλογή του αλγόριθμου που είναι πιο κατάλληλος για το πρόβλημα. Κύριο μειονέκτημα της μεθόδου είναι η απαίτηση σε υπολογιστική ισχύ, καθώς και η απαίτηση για καταγραφή δεδομένων (data) καλής ποιότητας από την πτήση.
Έχοντας σαν στόχο στα πλαίσια του παρόντος συγγράμματος μία εισαγωγική βασική προσέγγιση στις παραγώγους ευστάθειας, θα παρουσιασθεί και θα αναλυθεί μια πρώτη προσέγγιση των παραγώγων ευστάθειας, με τη χρήση προσεγγιστικών κλειστών αναλυτικών εκφράσεων, χρησιμοποιώντας σαν τυπικό παράδειγμα την έκφραση (6.8). Οι εκφράσεις των παραγώγων ευστάθειας που θα διατυπωθούν είναι διαστατές και μπορούν να αδιαστατοποιηθούν, όπως αναλυτικότερα περιγράφεται στο παράρτημα Δ.1.
Οι εκφράσεις που πρόκειται να αναπτυχθούν έχουν εφαρμογή σε υποηχητικές συνθήκες, ενώ η περαιτέρω ανάπτυξή τους, ώστε να προκύψει η εξάρτηση τους από τον αριθμό Mach είναι σχετικά σύντομη και απλή διαδικασία, επειδή ο αριθμός Mach ως γνωστόν δίνεται από τη σχέση Μach = VT/asound. Σχετικές εκφράσεις των παραγώγων ευστάθειας σε σχέση με τον αριθμό Mach μπορούν να βρεθούν στη βιβλιογραφία [12], [3].
3. Διαμήκεις Αεροδυναμικές παράγωγοι ευστάθειας
3.1. Εισαγωγικοί ορισμοί και υπολογισμοί
Ο υπολογισμός των παραγώγων ευστάθειας πραγματοποιείται στο σωματόδετο σύστημα αναφοράς του ανέμου –ή το ισοδύναμο σύστημα ευστάθειας για την περίπτωση της διαμήκους δυναμικής- με σκοπό την απλοποίηση της εξαγωγής των σχετικών εκφράσεων. Η επιλογή αυτή επιτρέπει τη διατήρηση στις σχέσεις μόνο των ουσιωδών παραμέτρων και μεγιστοποιεί την κατανόηση των φυσικών φαινομένων που λαμβάνουν χώρα.
Η σχετική γεωμετρία φαίνεται στο σχ. 6.2, όπου φαίνεται αεροσκάφος,
το οποίο υπόκειται σε μία διαμήκη, μικρή διαταραχή. Ο άξονας Οx του αεροσκάφους είναι και ο άξονας του ανέμου ενώ οι αρχικές
συνθήκες προκύπτουν από τη μόνιμη, συμμετρική, αντισταθμισμένη, οριζόντια πτήση
με ταχύτητα ![]() =Ue. Κατά τη διαταραχή η ολική ταχύτητα VT μεταβάλλεται με συνιστώσες U
και W κατά μήκος των αξόνων Ox και Oz
αντίστοιχα.
=Ue. Κατά τη διαταραχή η ολική ταχύτητα VT μεταβάλλεται με συνιστώσες U
και W κατά μήκος των αξόνων Ox και Oz
αντίστοιχα.
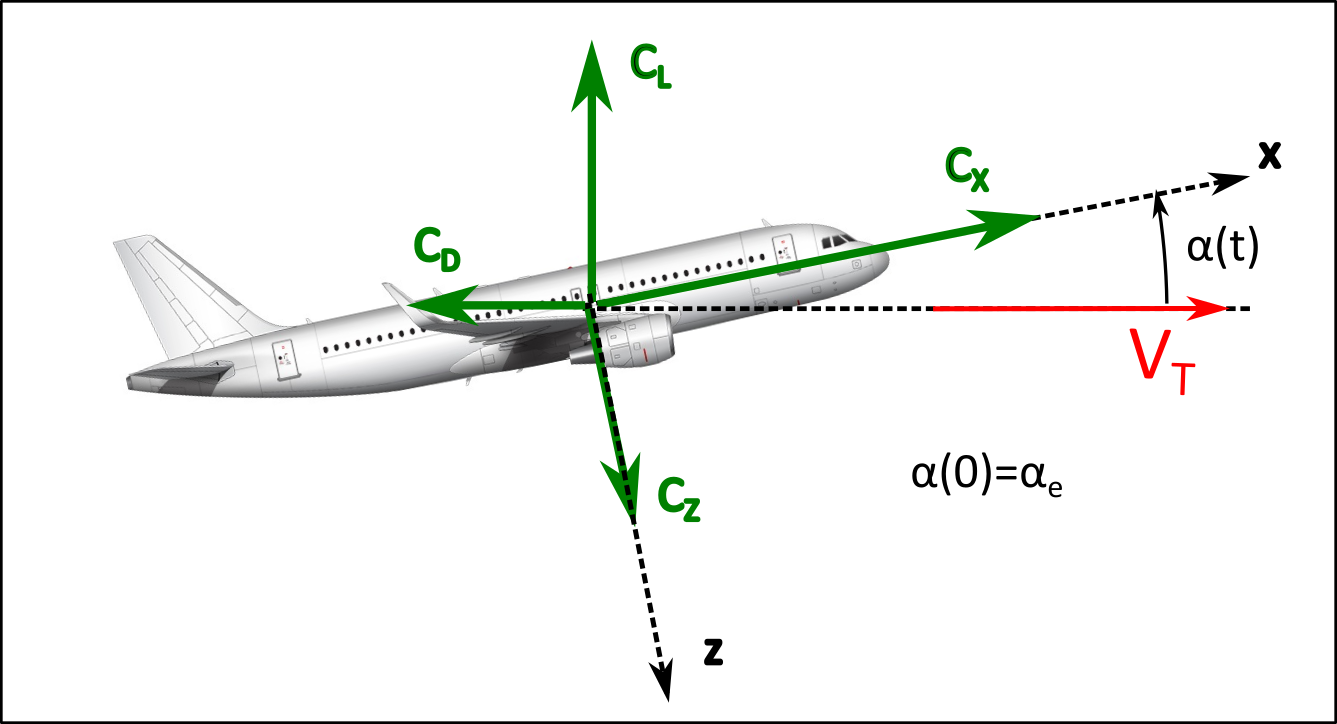
Σχήμα 6.2 Γεωμετρία, δυνάμεις και ροπές για μία μικρή διαταραχή διαμήκους δυναμικής
Επομένως η διαταραχή α της γωνίας πρόσπτωσης προκύπτει από τη σχέση (3.29):
|
|
|
|
Η ταχύτητα του αεροσκάφους μετά τη διαταραχή είναι:
|
|
|
(6.9) |
και οι συνιστώσες της προκύπτουν ως:
|
|
|
(6.10) |
Με βάση τη σχέσεις (6.9), (6.10) και (3.29), οι μερικές παράγωγοι ως προς τις ταχύτητες U και W προκύπτουν ως:
|
|
|
(6.11) |
Παραγωγίζοντας την εξίσωση (6.9) ως προς U και W κατά σειρά λαμβάνονται οι επόμενες μερικές παραγώγους:
|
|
|
(6.12) |
Εφαρμόζοντας τη σχέση (6.12), οι τιμές των παραγώγων της ταχύτητας στο σημείο e αντισταθμισμένης ισορροπίας, προκύπτουν ως:
|
|
|
(6.13) |
Από την ανάλυση των σχέσεων (6.11), (6.13), προκύπτει ότι οι διαταραχές των αεροδυναμικών δυνάμεων λόγω μεταβολής της ταχύτητας U κατά τον άξονα Ox, ουσιαστικά ισοδυναμούν με διαταραχές των αεροδυναμικών δυνάμεων, λόγω διαταραχής του μέτρου του λόγου u/Ue. Επίσης, οι διαταραχές των αεροδυναμικών δυνάμεων λόγω μεταβολής της ταχύτητας W κατά τον άξονα Oz ουσιαστικά ισοδυναμούν με διαταραχές των αεροδυναμικών δυνάμεων λόγω διαταραχής της γωνίας πρόσπτωσης α.
Οι παράγωγοι της δύναμης αντίστασης D προκύπτουν ως:
|
|
|
(6.14) |
|
|
|
(6.15) |
Οι αεροδυναμικοί συντελεστές που εμφανίζονται στις σχέσεις (6.14),(6.15) ορίζονται ως εξής:
|
|
|
(6.16) |
|
|
|
(6.17) |
Με όμοιο τρόπο οι παράγωγοι της δύναμης άνωσης L στο σημείο e αντισταθμισμένης ισορροπίας προκύπτουν ως:
|
|
|
(6.18) |
|
|
|
(6.19) |
Οι αεροδυναμικοί συντελεστές που εμφανίζονται στις σχέσεις (6.18),(6.19) ορίζονται ως εξής:
|
|
|
(6.20) |
|
|
|
(6.21) |
Όπως φαίνεται στο σχήμα 6.2, η δύναμη Τ λόγω της ώσης εφαρμόζεται κατά την κατεύθυνση του άξονα Ox και φυσικά μετακινείται μαζί με το αεροσκάφος Αν και η ώση Τ με την αυστηρή έννοια δεν είναι αεροδυναμική δύναμη, εν τούτοις μπορεί να συμπεριφέρεται σαν αεροδυναμική παράμετρος με την εφαρμογή της διαταραχής. Οι μεταβολές της δύναμης ώσης Τ από τις διαταραχές του μέτρου ταχύτητας και της γωνίας πρόσπτωσης είναι αρκετά σύνθετες και εξαρτώνται από τον συγκεκριμένο τύπο του κινητήρα που χρησιμοποιείται στο αεροσκάφος. Για αεροσκάφη με αεριοστρόβιλους (jet) μπορεί να ειπωθεί ότι η ώση Τ είναι ανεξάρτητη της ταχύτητας του αεροσκάφους. Ωστόσο, για ελικοφόρα αεροσκάφη, η ώση μειώνεται με την αύξηση της ταχύτητας του αεροσκάφους, λόγω των αεροδυναμικών φαινομένων που εμφανίζονται στην έλικα. Επίσης, μπορεί να ειπωθεί ότι η δύναμη ώσης Τ δεν επηρεάζεται από τη διαταραχή της γωνίας πρόσπτωσης. Οι παράγωγοι της δύναμης ώσης Τ στο σημείο e αντισταθμισμένης ισορροπίας προκύπτουν ως:
|
|
|
(6.22) |
|
|
|
(6.23) |
Οι προβολές των αεροδυναμικών δυνάμεων Χ,Ζ στους σωματόδετους άξονες Οx,Οz αντίστοιχα προκύπτουν για μικρές γωνίες πρόσπτωσης α ως εξής:
|
|
|
(6.24) |
|
|
|
(6.25) |
Στην αρχική μόνιμη κατάσταση ισορροπίας η ροπή πρόνευσης M είναι εξ ορισμού μηδέν, όμως κατά τη διαταραχή η μεταβατική ροπή πρόνευσης είναι μη μηδενική και δίνεται από τη σχέση:
|
|
|
(6.26) |
3.2. Παράγωγοι ευστάθειας λόγω διαταραχής του μέτρου της ταχύτητας
3.2.1.  :
Διαταραχή της αξονικής δύναμης Χ λόγω διαταραχής του μέτρου της ταχύτητας
:
Διαταραχή της αξονικής δύναμης Χ λόγω διαταραχής του μέτρου της ταχύτητας
Με παραγώγιση της (6.24) προκύπτει:
|
|
|
(6.27) |
Εφαρμόζοντας τη σχέση (6.27) στο σημείο e αντισταθμισμένης ισορροπίας, λαμβάνοντας υπόψη ότι στο όριο της αντισταθμισμένης ισορροπίας η διαταραχή α της γωνίας πρόσπτωσης τείνει στο μηδέν και χρησιμοποιώντας τις σχέσεις (6.22), (6.14) και (6.16) προκύπτει :
|
|
|
(6.28) |
3.2.2.  :
Διαταραχή της κάθετης δύναμης Ζ λόγω της διαταραχής του μέτρου της ταχύτητας
:
Διαταραχή της κάθετης δύναμης Ζ λόγω της διαταραχής του μέτρου της ταχύτητας
Μετά από παραγώγιση της εξίσωσης (6.25) ως προς την U στο σημείο e αντισταθμισμένης ισορροπίας, λαμβάνοντας υπόψη ότι στο όριο της αντισταθμισμένης ισορροπίας η διαταραχή α της γωνίας πρόσπτωσης τείνει στο μηδέν και χρησιμοποιώντας τις σχέσεις (6.18) και (6.20) προκύπτει :
|
|
|
(6.29) |
3.2.3.  :
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω της διαταραχής του
μέτρου της ταχύτητας
:
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω της διαταραχής του
μέτρου της ταχύτητας
Κατά τη διαταραχή η ροπή πρόνευσης γίνεται μη μηδενική και δίνεται από την εξίσωση (6.26). Μετά από παραγώγιση της σχέσης (6.26) ως προς U στο σημείο e αντισταθμισμένης ισορροπίας και λαμβάνοντας υπόψη ότι ο συντελεστής της ροπής πρόνευσης Cm τείνει στην τιμή της μόνιμης αντισταθμισμένης ισορροπίας, η οποία είναι φυσικά μηδέν, προκύπτει:
|
|
|
(6.30) |
όπου
|
|
|
(6.31) |
Σε υποηχητική ταχύτητα ή σε χαμηλούς αριθμούς Mach ο συντελεστής
της ροπής πρόνευσης Cm είναι σχεδόν ανεξάρτητος από την ταχύτητα ή
τον αριθμό Mach και επομένως η παράγωγος ![]() πολύ
συχνά υποτίθεται ότι είναι αμελητέα για αυτές τις συνθήκες πτήσης.
πολύ
συχνά υποτίθεται ότι είναι αμελητέα για αυτές τις συνθήκες πτήσης.
3.3. Παράγωγοι ευστάθειας λόγω διαταραχής της γωνίας πρόσπτωσης
3.3.1.  :
Διαταραχή της αξονικής δύναμης Χ λόγω διαταραχής της γωνίας πρόσπτωσης
:
Διαταραχή της αξονικής δύναμης Χ λόγω διαταραχής της γωνίας πρόσπτωσης
Με παραγώγιση της (6.24) ως προς W προκύπτει:
|
|
|
(6.32) |
Εφαρμόζοντας τη σχέση (6.32) στο σημείο e αντισταθμισμένης ισορροπίας, λαμβάνοντας υπόψη ότι στο όριο της αντισταθμισμένης ισορροπίας η διαταραχή α της γωνίας πρόσπτωσης τείνει στο μηδέν, χρησιμοποιώντας τις σχέσεις (6.23),(6.15),(6.17) και αντικαθιστώντας την τιμή της άνωσης L στο σημείο αντισταθμισμένης ισορροπίας προκύπτει :
|
|
|
(6.33) |
3.3.2.  :
Διαταραχή της κάθετης δύναμης Ζ λόγω διαταραχής της γωνίας πρόσπτωσης
:
Διαταραχή της κάθετης δύναμης Ζ λόγω διαταραχής της γωνίας πρόσπτωσης
Όπως και προηγουμένως, με παραγώγιση της σχέσης (6.25) ως προς W στο σημείο e αντισταθμισμένης ισορροπίας, λαμβάνοντας υπόψη ότι στο όριο της αντισταθμισμένης ισορροπίας η διαταραχή α της γωνίας πρόσπτωσης τείνει στο μηδέν, αντικαθιστώντας την τιμή της οπισθέλκουσας D στο σημείο αντισταθμισμένης ισορροπίας και χρησιμοποιώντας τις σχέσεις (6.19),(6.21) προκύπτει:
|
|
|
(6.34) |
3.3.3.  :
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω διαταραχής της γωνίας
πρόσπτωσης
:
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω διαταραχής της γωνίας
πρόσπτωσης
Όπως και προηγουμένως, με παραγώγιση της σχέσης (6.26) ως προς W και σύμφωνα με τη σχέση (6.27) μπορεί να δειχθεί ότι:
|
|
|
(6.35) |
Στο όριο ![]() η
εξίσωση (6.35) οδηγεί στην έκφραση: :
η
εξίσωση (6.35) οδηγεί στην έκφραση: :
|
|
|
(6.36) |
Η σημασία του συντελεστή ![]() στη στατική ευστάθεια του αεροσκάφους αναλύεται διεξοδικά
στο κεφάλαιο 2.2.2 περί στατικής ισορροπίας. O συντελεστής
στη στατική ευστάθεια του αεροσκάφους αναλύεται διεξοδικά
στο κεφάλαιο 2.2.2 περί στατικής ισορροπίας. O συντελεστής ![]() ορίζεται
από τη σχέση (2.23):
ορίζεται
από τη σχέση (2.23):
|
|
|
|
Εκφράζει ουσιαστικά την κλίση της καμπύλης της ροπής πρόνευσης ως
προς τη γωνία πρόσπτωσης και πρέπει να έχει αρνητική κλίση στην περιοχή του
σημείου αντιστάθμισης για ένα στατικά ευσταθές αεροσκάφος. Μία απλή έκφραση για
τον συντελεστή ![]() προκύπτει από κατάλληλη
εναλλακτική διατύπωση της σχέση (2.26) στη μορφή:
προκύπτει από κατάλληλη
εναλλακτική διατύπωση της σχέση (2.26) στη μορφή:
|
|
|
(6.37) |
όπου εδώ το α εκφράζει την κλίση της καμπύλης της άνωσης και Κη είναι το στατικό περιθώριο με τα χειριστήρια σταθεροποιημένα.
Όπως λοιπόν προκύπτει, η παράγωγος ![]() παρέχει
ένα μέτρο της ακαμψίας πρόνευσης του αεροσκάφους. Ισοδυναμεί δηλαδή με ένα “στροφικό
ελατήριο” επαναφοράς σε διαταραχές της γωνίας πρόσπτωσης. Κατά συνέπεια είναι μία
από τις σημαντικότερες παραγώγους ευστάθειας και διαδραματίζει ένα σημαντικό
ρόλο στον καθορισμό της βραχυπρόθεσμης διαμήκους δυναμικής.
παρέχει
ένα μέτρο της ακαμψίας πρόνευσης του αεροσκάφους. Ισοδυναμεί δηλαδή με ένα “στροφικό
ελατήριο” επαναφοράς σε διαταραχές της γωνίας πρόσπτωσης. Κατά συνέπεια είναι μία
από τις σημαντικότερες παραγώγους ευστάθειας και διαδραματίζει ένα σημαντικό
ρόλο στον καθορισμό της βραχυπρόθεσμης διαμήκους δυναμικής.
3.4. Παράγωγοι ευστάθειας λόγω διαταραχής της ταχύτητας πρόνευσης
Οι διαμήκεις αεροδυναμικές ιδιότητες ενός αεροσκάφους συνήθως καθορίζονται στον μεγαλύτερο τους βαθμό από τις ιδιότητες της πτέρυγας και του οριζόντιου ουραίου πτερύγιου. Μια μικρή διαταραχή ως προς τον ρυθμό πρόνευσης όμως έχει σημαντική επίδραση στην αεροδυναμική του οριζόντιου ουραίου πτερύγιου. Στο σχήμα 6.3 φαίνεται ένα αεροσκάφος στο οποίο σημειώνεται άνοδος του ρύγχους κεφαλής (pitching) σε σχέση με τη στάση αντισταθμισμένης ισορροπίας μετά τη διαταραχή του ρυθμού πρόνευσης q.
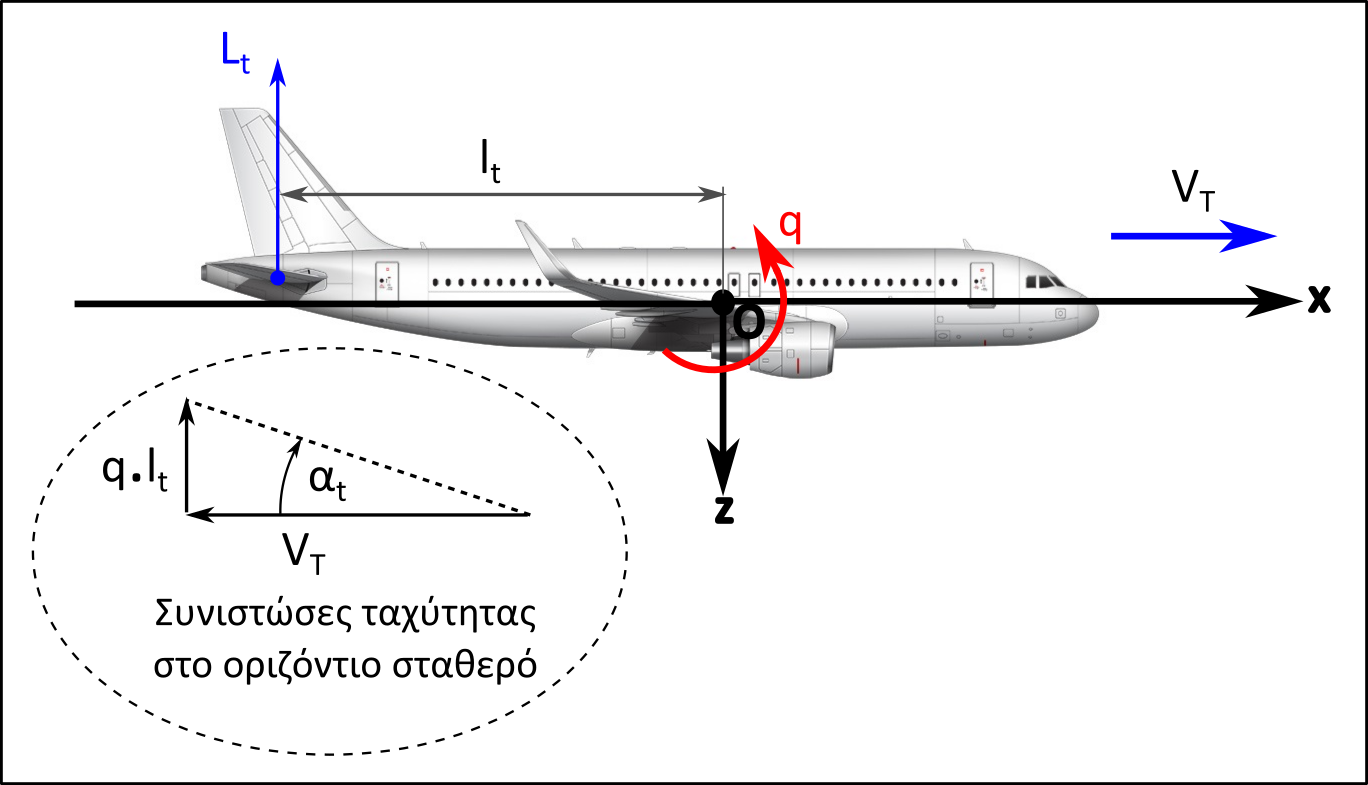
Σχήμα 6.3 Διαταραχή της γωνίας πρόσπτωσης της πίσω πτέρυγας λόγω διαταραχής της ταχύτητας πρόνευσης
Εφόσον η επίδραση του ρυθμού πρόνευσης προκαλεί την εμφάνιση μίας συνιστώσας κατακόρυφης ταχύτητας στο οριζόντιο σταθερό πτερύγιο, λόγω περιστροφής του αεροσκάφους γύρω από το κέντρο βάρους Ο, το αποτέλεσμα είναι μια αλλαγή (διαταραχή) αtq στην τοπική γωνία πρόσπτωσης αt του οριζόντιου ουραίου πτερύγιου. Η ολική ταχύτητα είναι VT και η διαταραχή αtq στη γωνία πρόσπτωσης του ουραίου δίνεται από τη σχέση:
|
|
|
(6.38) |
αφού εξ’ ορισμού η αtq είναι μικρή γωνία. Θα πρέπει να τονισθεί ότι η αtq είναι η μεταβολή (διαταραχή) ή διαφορετικά η αύξηση της γωνίας πρόσπτωσης σε σχέση με την τιμή ισορροπίας και όπως ακριβώς συμβαίνει και με τον ρυθμό πρόνευσης, είναι μεταβατική στη φύση της. Από τη σχέση (6.38) προκύπτει ότι:
|
|
|
(6.39) |
3.4.1.  :
Διαταραχή της αξονικής δύναμης Χ λόγω διαταραχής της ταχύτητας πρόνευσης
:
Διαταραχή της αξονικής δύναμης Χ λόγω διαταραχής της ταχύτητας πρόνευσης
Η διαταραχή Χt της αξονικής δύναμης Χ προκύπτει από τη διαταραχή της οπισθέλκουσας του οριζόντιου ουραίου πτερύγιου και συνεπώς:
|
|
|
(6.40) |
Σύμφωνα με την (6.39) προκύπτει :
|
|
|
(6.41) |
H παραγώγιση της (6.40)
ως προς τη μεταβλητή της διαταραχής q, με την υπόθεση ότι η VΤ είναι
ανεξάρτητη του ρυθμού πρόνευσης q, με εφαρμογή της εξίσωσης (6.41) και στη
συνέχεια λαμβάνοντας το όριο αντισταθμισμένης ισορροπίας όπου ![]() ,
η παράγωγος ευστάθειας
,
η παράγωγος ευστάθειας ![]() προκύπτει ως:
προκύπτει ως:
|
|
|
(6.42) |
όπου
|
|
|
(6.43) |
Επειδή ο ρυθμός μεταβολής της οπισθέλκουσας του οριζόντιου ουραίου
πτερύγιου σε σχέση με τη γωνία πρόσπτωσης είναι συνήθως μικρός, η παράγωγος
ευστάθειας ![]() είναι
μικρή και έτσι συνήθως αμελείται στην ανάλυση ευστάθειας και ελέγχου του
αεροσκάφους.
είναι
μικρή και έτσι συνήθως αμελείται στην ανάλυση ευστάθειας και ελέγχου του
αεροσκάφους.
3.4.2.  :
Διαταραχή της κάθετης δύναμης Ζ λόγω διαταραχής της ταχύτητας πρόνευσης
:
Διαταραχή της κάθετης δύναμης Ζ λόγω διαταραχής της ταχύτητας πρόνευσης
Η διαταραχή Ζt της κάθετης δύναμης Ζ προκύπτει από τη διαταραχή της άνωσης του οριζόντιου ουραίου πτερύγιου και συνεπώς:
|
|
|
(6.44) |
Σύμφωνα με την (6.39) προκύπτει:
|
|
|
(6.45) |
H παραγώγιση της (6.44)
ως προς τη μεταβλητή της διαταραχής q, με την υπόθεση ότι η VΤ είναι
ανεξάρτητη του ρυθμού πρόνευσης q, με εφαρμογή της εξίσωσης (6.45) και στη
συνέχεια λαμβάνοντας το όριο αντισταθμισμένης ισορροπίας όπου ![]() ,
η παράγωγος ευστάθειας
,
η παράγωγος ευστάθειας ![]() προκύπτει ως:
προκύπτει ως:
|
|
|
(6.46) |
όπου
|
|
|
(6.47) |
3.4.3.  :
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω διαταραχής της ταχύτητας
πρόνευσης
:
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω διαταραχής της ταχύτητας
πρόνευσης
Κατά τη διαταραχή του ρυθμού πρόνευσης q, η διαταραχή της ροπής πρόνευσης Mt προκύπτει ολοκληρωτικά από τη ροπή της διαταραχής Ζt της κάθετης δύναμης Ζ του οριζόντιου ουραίου πτερύγιου γύρω από το Ο, η οποία προκύπτει από την (6.44). Έτσι, κατά τη διαταραχή:
|
|
|
(6.48) |
Με παραγώγιση της σχέσης (6.48) ως προς q η παράγωγος ευστάθειας ![]() προκύπτει ως :
προκύπτει ως :
|
|
|
(6.49) |
Στο κεφάλαιο 4 έχει αναλυθεί ότι η ![]() αποτελεί
την παράγωγο ευστάθειας που χαρακτηρίζει την απόσβεση της πρόνευσης (“Στροφικός
αποσβεστήρας”). Αν και αυτό το απλό μοντέλο που εκφράζεται από τη σχέση (6.49) επισημαίνει
τον σημαντικό ρόλο που παίζει το οριζόντιο ουραίο πτερύγιο στον καθορισμό των
χαρακτηριστικών απόσβεσης του αεροσκάφους ως προς την πρόνευση, πρέπει να σημειωθεί
ότι πολλές φορές η επίδραση της ατράκτου και των πτερύγων είναι εξίσου
σημαντική. Επομένως η παραπάνω έκφραση για την παράγωγο ευστάθειας που αφορά
στη ροπή πρόνευσης πρέπει να θεωρηθεί ως πρώτη προσέγγιση-που είναι μεν
ικανοποιητική για τους προκαταρκτικούς υπολογισμούς αλλά ανεπαρκής ως τελική
έκφραση για αυτή την παράγωγο.
αποτελεί
την παράγωγο ευστάθειας που χαρακτηρίζει την απόσβεση της πρόνευσης (“Στροφικός
αποσβεστήρας”). Αν και αυτό το απλό μοντέλο που εκφράζεται από τη σχέση (6.49) επισημαίνει
τον σημαντικό ρόλο που παίζει το οριζόντιο ουραίο πτερύγιο στον καθορισμό των
χαρακτηριστικών απόσβεσης του αεροσκάφους ως προς την πρόνευση, πρέπει να σημειωθεί
ότι πολλές φορές η επίδραση της ατράκτου και των πτερύγων είναι εξίσου
σημαντική. Επομένως η παραπάνω έκφραση για την παράγωγο ευστάθειας που αφορά
στη ροπή πρόνευσης πρέπει να θεωρηθεί ως πρώτη προσέγγιση-που είναι μεν
ικανοποιητική για τους προκαταρκτικούς υπολογισμούς αλλά ανεπαρκής ως τελική
έκφραση για αυτή την παράγωγο.
3.5. Παράγωγοι ευστάθειας λόγω διαταραχής του ρυθμού της γωνίας πρόσπτωσης
Σε υποηχητικές ταχύτητες με χαμηλούς αριθμούς Mach ο αέρας ουσιαστικά
συμπεριφέρεται σαν ασυμπίεστο ρευστό. Κατά συνέπεια, οι διαταραχές ![]() διαδίδονται
σχεδόν ακαριαία σε όλο το πεδίο ροής. Δεδομένου ότι διαταραχές
διαδίδονται
σχεδόν ακαριαία σε όλο το πεδίο ροής. Δεδομένου ότι διαταραχές ![]() είναι
επιταχύνσεις, ουσιαστικά δρουν στην ποσότητα της μάζας του ρευστού που
περιβάλει το αεροσκάφος και προσπαθούν να μεταβάλουν την κινηματική της
κατάσταση, παρασύροντάς την ώστε να παρακολουθήσει την κίνηση του αεροσκάφους. Σαν
αποτέλεσμα, η μάζα του ρευστού δημιουργεί αντίδραση στο αεροσκάφος υπό τη μορφή
αδρανειακών δυνάμεων. Για αυτόν τον λόγο η μάζα αυτή αναφέρεται συχνά με τους
όρους της φαινόμενης (apparent) ή εικονικής (virtual) μάζας και αδράνειας.
είναι
επιταχύνσεις, ουσιαστικά δρουν στην ποσότητα της μάζας του ρευστού που
περιβάλει το αεροσκάφος και προσπαθούν να μεταβάλουν την κινηματική της
κατάσταση, παρασύροντάς την ώστε να παρακολουθήσει την κίνηση του αεροσκάφους. Σαν
αποτέλεσμα, η μάζα του ρευστού δημιουργεί αντίδραση στο αεροσκάφος υπό τη μορφή
αδρανειακών δυνάμεων. Για αυτόν τον λόγο η μάζα αυτή αναφέρεται συχνά με τους
όρους της φαινόμενης (apparent) ή εικονικής (virtual) μάζας και αδράνειας.
Σε αντίθεση όμως με κατασκευές σε υγρά περιβάλλοντα (π.χ. πλοία, πλωτές εξέδρες, κτλ.), επειδή η πυκνότητα του αέρα είναι πολύ μικρή, η μάζα του αέρα που μετακινείται μαζί με το αεροσκάφος δεν αποτελεί παρά ένα μικρό μόνο κλάσμα της συνολικής του μάζας, και επομένως η επίδραση της στην αδράνεια του αεροσκάφους μπορεί να αγνοηθεί για τα περισσότερα αεροσκάφη. Εξαίρεση στον παραπάνω κανόνα αποτελεί το αερόπλοιο για το οποίο οι τιμές της φαινόμενης μάζας και αδράνειας μπορούν να είναι κατά 50% μεγαλύτερες από τις φυσικές τους τιμές. Άλλα οχήματα για τα οποία αυτά τα φαινόμενα δεν είναι αμελητέα είναι τα αερόστατα και τα αλεξίπτωτα.
Μία ειδική περίπτωση όμως που χρειάζεται να ληφθεί υπόψη, ειδικά
σε πολλά σύγχρονα αεροσκάφη υψηλών επιδόσεων, είναι η επίδραση που ασκεί στο
πίσω οριζόντιο ουραίο πτερύγιο ο ρυθμός μεταβολής της διαταραχής ![]() της
κάθετης ταχύτητας στην κύρια πτέρυγα. Η διαταραχή της κάθετης ταχύτητας w προκαλεί μια διαταραχή της γωνίας
πρόσπτωσης στην κύρια πτέρυγα και κατά συνέπεια μια μεταβατική διαταραχή στο
κατώρευμα πίσω από την κύρια πτέρυγα, η οποία διαταραχή μετά από λίγο χρόνο διαδίδεται
στο κατάντη πεδίο ροής και διέρχεται πάνω από το οριζόντιο ουραίο πτερύγιο. Το
φαινόμενο του κατωρεύματος αναλύθηκε στο υποκεφάλαιο
1.1.4. του Κεφ. 1 και γίνεται καλύτερα κατανοητό με τη βοήθεια του σχήματος
6.4.
της
κάθετης ταχύτητας στην κύρια πτέρυγα. Η διαταραχή της κάθετης ταχύτητας w προκαλεί μια διαταραχή της γωνίας
πρόσπτωσης στην κύρια πτέρυγα και κατά συνέπεια μια μεταβατική διαταραχή στο
κατώρευμα πίσω από την κύρια πτέρυγα, η οποία διαταραχή μετά από λίγο χρόνο διαδίδεται
στο κατάντη πεδίο ροής και διέρχεται πάνω από το οριζόντιο ουραίο πτερύγιο. Το
φαινόμενο του κατωρεύματος αναλύθηκε στο υποκεφάλαιο
1.1.4. του Κεφ. 1 και γίνεται καλύτερα κατανοητό με τη βοήθεια του σχήματος
6.4.
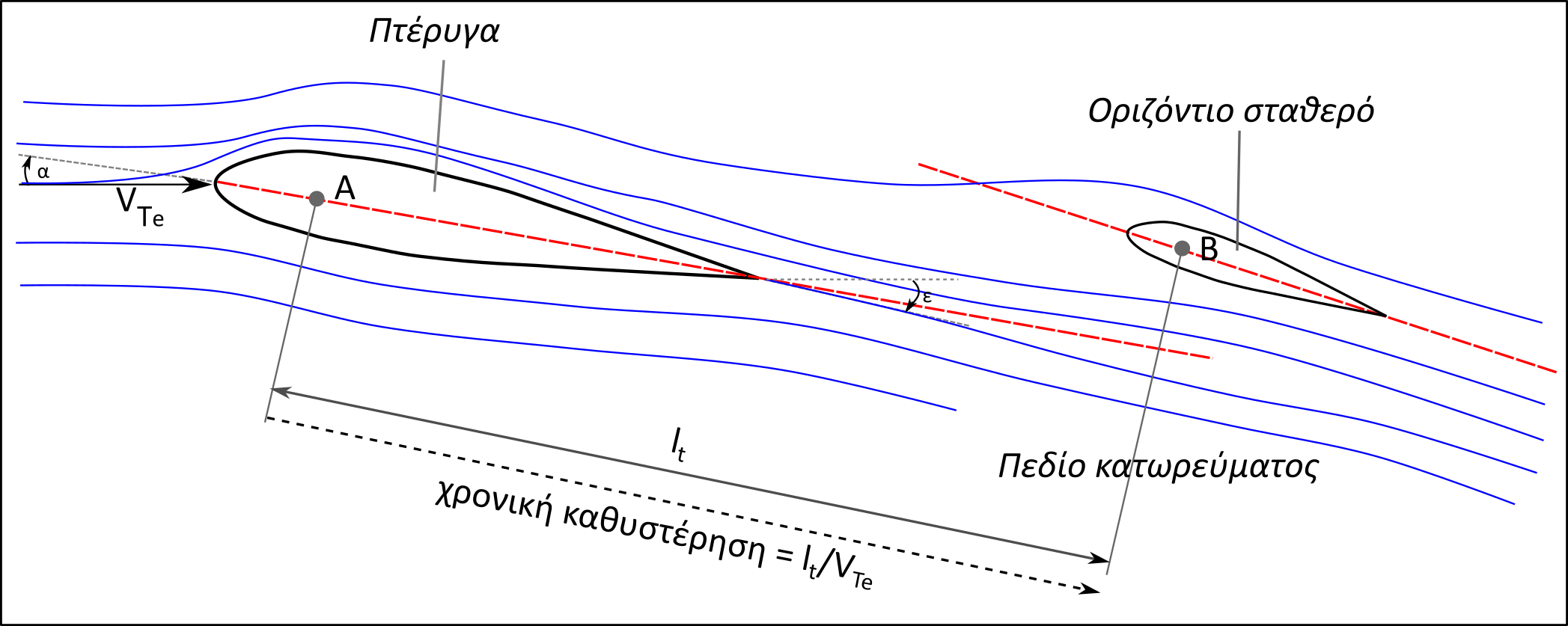
Σχήμα 6.4 Διαταραχή της γωνίας πρόσπτωσης της πίσω
πτέρυγας λόγω διαταραχής του ρυθμού μεταβολής της διαταραχής ![]() της
κάθετης ταχύτητας στην κύρια πτέρυγα σαν αποτέλεσμα του κατωρεύματος.
της
κάθετης ταχύτητας στην κύρια πτέρυγα σαν αποτέλεσμα του κατωρεύματος.
Όπως προαναφέρθηκε (2.1.2., κεφ.2), από τη στιγμή που στο οριζόντιο ουραίο σταθερό πτερύγιο επάγεται μία διαταραχή στη γωνία πρόσπτωσης, αυτό αποκρίνεται ανάλογα με μια διαταραχή στη δύναμη άνωσης που ασκείται σε αυτό. Έτσι, το συνολικό αποτέλεσμα που προκαλείται στην άτρακτο, δεν μπορεί να είναι αμελητέο. Αυτό το συγκεκριμένο χαρακτηριστικό φαινόμενο ονομάζεται υστέρηση λόγω κατωρεύματος (downwash lag effect).
Η χρονική υστέρηση στο φαινόμενο του κατωρεύματος γίνεται καλύτερα κατανοητή με τη βοήθεια του σχήματος 6.4. Μια διαταραχή στο σημείο Α του πεδίου ροής γύρω από την κύρια πτέρυγα φτάνει στο σημείο Β του πεδίου ροής γύρω από το ουραίο οριζόντιο πτερύγιο με μία χρονική καθυστέρηση:
|
|
|
(6.50) |
Ο χρόνος Τd αναφέρεται και ως υστέρηση λόγω κατωρεύματος [3].
Θεωρώντας ότι στην κύρια πτέρυγα εξελίσσεται ένα φαινόμενο διαταραχής της γωνίας πρόσπτωσης με σταθερό χρονικό ρυθμό μεταβολής, η τιμή της γωνίας πρόσπτωσης αw στην κύρια πτέρυγα μεταβάλλεται με τον χρόνο ως εξής:
|
|
|
(6.51) |
Σύμφωνα με τη σχέση (3.29) ο ρυθμός μεταβολής της γωνίας πρόσπτωσης είναι:
|
|
|
(6.52) |
Η έκφραση για τη συνολική γωνία πρόσπτωσης του οριζόντιου σταθερού τη χρονική στιγμή t δίνεται από τη σχέση (2.9):
|
|
|
(6.53) |
όπου αw είναι η γωνία πρόσπτωσης στην κύρια πτέρυγα, iw είναι η γωνία θέσης (setting angle) της κύριας πτέρυγας, it είναι η γωνία θέσης (setting angle) του οριζόντιου ουραίου πτερυγίου και ε η γωνία κατωρεύματος στο οριζόντιο ουραίο πτερύγιο οριζόντιο.
Η γωνία κατωρεύματος προκύπτει σύμφωνα με την εξίσωση (2.16) από τη σχέση:
|
|
|
(6.54) |
λαμβάνοντας υπόψη τον χρόνο Τd που χρειάζεται για να διαδοθεί στο πίσω ουραίο πτερύγιο μία διαταραχή στη γωνία πρόσπτωσης αw της κύριας πτέρυγας. Η γωνία εο είναι η γωνία κατωρεύματος για μηδενική γωνία πρόσπτωσης αw. Στην περίπτωση ελλειπτικής κατανομής της άνωσης, η κλίση της γωνίας κατωρεύματος προκύπτει από την εξίσωση (2.17):
|
|
|
(6.55) |
όπου ![]() είναι
η κλίση της καμπύλης άνωσης κα ΑRw o λόγος επιμήκους
[εξίσωση (1.14)].
είναι
η κλίση της καμπύλης άνωσης κα ΑRw o λόγος επιμήκους
[εξίσωση (1.14)].
Αντικατάσταση των σχέσεων (6.51),(6.52) και (6.54) στην (6.53) οδηγεί στο αποτέλεσμα:
|
|
|
(6.56) |
Θεωρείται επίσης, ότι το αεροσκάφος πριν τη διαταραχή βρίσκεται σε κατάσταση μόνιμης αντισταθμισμένης ισορροπίας, στην οποία επίσης επανέρχεται το αεροσκάφος μετά τη διαταραχή w, εφόσον η διαταραχή w θεωρείται μεταβατική. Τότε στην κατάσταση αντισταθμισμένης ισορροπίας ισχύει:
|
|
|
(6.57) |
όπου ![]() είναι
η μόνιμη γωνία πρόσπτωσης στο οριζόντιο ουραίο πτερύγιο, στην οποία τείνει η αw(t) μετά την πάροδο της διαταραχής,
είναι
η μόνιμη γωνία πρόσπτωσης στο οριζόντιο ουραίο πτερύγιο, στην οποία τείνει η αw(t) μετά την πάροδο της διαταραχής,
![]() είναι
η μόνιμη γωνία πρόσπτωσης στην κύρια πτέρυγα, στην οποία τείνει η αw(t) μετά την πάροδο της διαταραχής
και εe είναι η μόνιμη
γωνία κατωρεύματος, στην οποία τείνει η ε(t) μετά την
πάροδο της διαταραχής και η οποία προκαλείται από τη μόνιμη γωνία πρόσπτωσης
είναι
η μόνιμη γωνία πρόσπτωσης στην κύρια πτέρυγα, στην οποία τείνει η αw(t) μετά την πάροδο της διαταραχής
και εe είναι η μόνιμη
γωνία κατωρεύματος, στην οποία τείνει η ε(t) μετά την
πάροδο της διαταραχής και η οποία προκαλείται από τη μόνιμη γωνία πρόσπτωσης ![]() στην κύρια πτέρυγα.
στην κύρια πτέρυγα.
Σύγκριση των εξισώσεων (6.56) και (6.57) οδηγεί στο συμπέρασμα
ότι ο ρυθμός μεταβολής της διαταραχής ![]() της
κάθετης ταχύτητας προκαλεί μία αλλαγή (διαταραχή)
της
κάθετης ταχύτητας προκαλεί μία αλλαγή (διαταραχή) ![]() στην
τοπική γωνία πρόσπτωσης αt του οριζόντιου ουραίου
πτερύγιου, η οποία δίνεται από τη σχέση:
στην
τοπική γωνία πρόσπτωσης αt του οριζόντιου ουραίου
πτερύγιου, η οποία δίνεται από τη σχέση:
|
|
|
(6.58) |
Με βάση τη σχέση (6.58) προκύπτει ότι:
|
|
|
(6.59) |
Σαν συνέπεια των σχέσεων (6.58),(6.59), η τεχνική ανάλυση της
επίδρασης των διαταραχών ![]() στις
αεροδυναμικές δυνάμεις του αεροσκάφους ακολουθεί τα ίδια βήματα με την ανάλυση
των επιδράσεων των διαταραχών του ρυθμού πρόνευσης q, όπως
αυτή αναπτύχθηκε στο υποκεφάλαιο 3.4 του παρόντος κεφαλαίου.
στις
αεροδυναμικές δυνάμεις του αεροσκάφους ακολουθεί τα ίδια βήματα με την ανάλυση
των επιδράσεων των διαταραχών του ρυθμού πρόνευσης q, όπως
αυτή αναπτύχθηκε στο υποκεφάλαιο 3.4 του παρόντος κεφαλαίου.
3.5.1.  :
Διαταραχή της αξονικής δύναμης Χ λόγω διαταραχής του ρυθμού μεταβολής της
γωνίας πρόσπτωσης
:
Διαταραχή της αξονικής δύναμης Χ λόγω διαταραχής του ρυθμού μεταβολής της
γωνίας πρόσπτωσης
Η διαταραχή Χt της αξονικής δύναμης Χ προκύπτει από τη διαταραχή της οπισθέλκουσας του οριζόντιου ουραίου πτερύγιου, η οποία δίδεται από τη σχέση (6.40).
Σύμφωνα με την (6.59) προκύπτει:
|
|
|
(6.60) |
όπου η ![]() ορίζεται από την (6.43).
ορίζεται από την (6.43).
Με παραγώγιση της (6.40) ως προς τη
μεταβλητή της διαταραχής ![]() ,
με την υπόθεση ότι η VΤ είναι ανεξάρτητη του ρυθμού της διαταραχής
,
με την υπόθεση ότι η VΤ είναι ανεξάρτητη του ρυθμού της διαταραχής ![]() ,
λαμβάνοντας το όριο αντισταθμισμένης ισορροπίας όπου
,
λαμβάνοντας το όριο αντισταθμισμένης ισορροπίας όπου ![]() και
με εφαρμογή της εξίσωσης (6.60) η παράγωγος ευστάθειας
και
με εφαρμογή της εξίσωσης (6.60) η παράγωγος ευστάθειας ![]() προκύπτει
ως:
προκύπτει
ως:
|
|
|
(6.61) |
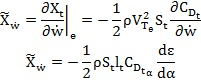
Επειδή ο ρυθμός μεταβολής της οπισθέλκουσας του οριζόντιου ουραίου
πτερύγιου σε σχέση με τη γωνία πρόσπτωσης είναι συνήθως μικρός, η παράγωγος
ευστάθειας ![]() είναι
μικρή και έτσι συνήθως αμελείται στην ανάλυση ευστάθειας και ελέγχου του
αεροσκάφους.
είναι
μικρή και έτσι συνήθως αμελείται στην ανάλυση ευστάθειας και ελέγχου του
αεροσκάφους.
3.5.2  :
Διαταραχή της κάθετης δύναμης Ζ λόγω διαταραχής του ρυθμού μεταβολής της γωνίας
πρόσπτωσης
:
Διαταραχή της κάθετης δύναμης Ζ λόγω διαταραχής του ρυθμού μεταβολής της γωνίας
πρόσπτωσης
Η διαταραχή Ζt της κάθετης δύναμης Ζ προκύπτει από τη διαταραχή της άνωσης του οριζόντιου ουραίου πτερύγιου, όπως ορίζεται στη σχέση (6.44).
Σύμφωνα με την (6.59) προκύπτει
|
|
|
(6.62) |
όπου η ![]() ορίζεται από την (6.43).
ορίζεται από την (6.43).
Με παραγώγιση της (6.44) ως προς τη
μεταβλητή της διαταραχής ![]() ,
με την υπόθεση ότι η VΤ είναι ανεξάρτητη του ρυθμού της διαταραχής
,
με την υπόθεση ότι η VΤ είναι ανεξάρτητη του ρυθμού της διαταραχής ![]() ,
λαμβάνοντας το όριο αντισταθμισμένης ισορροπίας, όπου
,
λαμβάνοντας το όριο αντισταθμισμένης ισορροπίας, όπου ![]() και
με εφαρμογή της εξίσωσης (6.62) η παράγωγος ευστάθειας
και
με εφαρμογή της εξίσωσης (6.62) η παράγωγος ευστάθειας ![]() προκύπτει
ως:
προκύπτει
ως:
|
|
|
(6.63) |
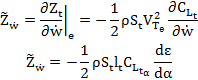
Η ![]() μπορεί
να πάρει σημαντικές τιμές, λόγω του μεγέθους της άνωσης του οριζόντιου ουραίου
πτερύγιου.
μπορεί
να πάρει σημαντικές τιμές, λόγω του μεγέθους της άνωσης του οριζόντιου ουραίου
πτερύγιου.
3.5.3.  :
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω διαταραχής του ρυθμού
μεταβολής της γωνίας πρόσπτωσης
:
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω διαταραχής του ρυθμού
μεταβολής της γωνίας πρόσπτωσης
Κατά τη διαταραχή ![]() ,
η διαταραχή της ροπής πρόνευσης Mt προκύπτει
ολοκληρωτικά από τη ροπή της διαταραχής Ζt
της κάθετης δύναμης Ζ του οριζόντιου ουραίου πτερύγιου γύρω από το Ο, και η
οποία δίδεται στην εξίσωση (6.48). Με παραγώγιση της σχέσης (6.48) ως προς
,
η διαταραχή της ροπής πρόνευσης Mt προκύπτει
ολοκληρωτικά από τη ροπή της διαταραχής Ζt
της κάθετης δύναμης Ζ του οριζόντιου ουραίου πτερύγιου γύρω από το Ο, και η
οποία δίδεται στην εξίσωση (6.48). Με παραγώγιση της σχέσης (6.48) ως προς ![]() ,
η παράγωγος ευστάθειας
,
η παράγωγος ευστάθειας ![]() προκύπτει
ως:
προκύπτει
ως:
|
|
|
(6.64) |
Η παράγωγος ![]() είναι
σχεδόν πάντοτε σημαντική ποσότητα και αποτελεί σημαντικό παράγοντα στην
απόσβεση της ταλάντωσης της μικρής περιόδου (βλ. εξίσωση 4.20), σε αντίστοιχο
ρόλο με τη ροπή
είναι
σχεδόν πάντοτε σημαντική ποσότητα και αποτελεί σημαντικό παράγοντα στην
απόσβεση της ταλάντωσης της μικρής περιόδου (βλ. εξίσωση 4.20), σε αντίστοιχο
ρόλο με τη ροπή ![]() .
.
4. Οι αεροδυναμικές παράγωγοι ευστάθειας της εγκάρσιας-διεύθυνσης δυναμικής
Αντίθετα με τις διαμήκεις αεροδυναμικές παραγώγους ευστάθειας, οι παράγωγοι ευστάθειας στην εγκάρσια διεύθυνση είναι πολύ πιο δύσκολο να υπολογισθούν, έστω και σε προσεγγιστικό βαθμό. Το πρόβλημα ξεκινά από τις παρεμβολές εμποδίων τα οποία δημιουργούν ασύμμετρες συνθήκες ροής ανάμεσα στις διατάξεις άνωσης, στην άτρακτο, στους κινητήρες, στο σύστημα προσγείωσης κλπ. Έτσι, οι παράγοντες που επηρεάζουν αυτές τις παραγώγους ευστάθειας είναι δύσκολο να αναγνωρισθούν και ειδικότερα να ποσοτικοποιηθούν.
Σε περίπτωση που είναι δύσκολη η έκφραση των παραγώγων ευστάθειας με αναλυτικές μεθόδους, όπως γίνεται π.χ. για τις διαμήκεις παραγώγους, μπορούν να χρησιμοποιηθούν άλλες πιο σύνθετες αεροδυναμικές μέθοδοι ανάλυσης. Ένα τυπικό παράδειγμα αποτελεί η θεωρία των λωρίδων (strip theory), όπως παρουσιάζεται από τον Nelson [5], η οποία με τη σειρά της τείνει να υπέρ-απλουστεύει τις αεροδυναμικές συνθήκες, έτσι ώστε να καθίσταται ευχερής η ανάλυση. Σε κάθε περίπτωση, οι αναλυτικοί υπολογισμοί των παραγώγων ευστάθειας στην εγκάρσια διεύθυνση δίνουν συχνά φτωχή ακρίβεια. Παρ' όλα αυτά αυτές οι απλές θεωρίες παρέχουν μια πρώτη ανάλυση των φυσικών φαινομένων που λαμβάνουν χώρα και επομένως βοηθούν στην πληρέστερη κατανόηση της δυναμικής του αεροσκάφους.
4.1. Παράγωγοι λόγω της πλαγιολίσθησης
H θετική πλαγιολίσθηση (sideslip) σημαίνει δεξιά κίνηση του αεροσκάφους σε σχέση με τη θέση του πιλότου (και ανάλογα με τα σύμβολα που χρησιμοποιούνται) και η οποία ορίζεται χρησιμοποιώντας την εγκάρσια (πλάγια) ταχύτητα v που αναφέρεται στις μικρές διαταραχές. Η φύση μιας θετικής διαταραχής, που αφορά στην πλαγιολίσθηση, είναι τέτοια ώστε η δεξιά πτέρυγα τείνει να χαμηλώσει και το ρύγχος του αεροσκάφους να περιστραφεί αριστερά της σχετικής ταχύτητας του ανέμου, καθώς το αεροσκάφος κινείται πλέον δεξιά.
Η απόκριση του αεροσκάφους στη διαταραχή μπορεί να έχει ευσταθή χαρακτηριστικά, εφόσον οι αεροδυναμικές δυνάμεις και ροπές που προκαλούνται σαν αντίδραση στην πλαγιολίσθηση τείνουν να επαναφέρουν το αεροσκάφος σε μια σταθερή κατάσταση ισορροπίας με τις πτέρυγες οριζόντιες. Οι κινήσεις που λαμβάνουν χώρα έχουν περιγραφεί με αρκετή λεπτομέρεια στα κεφάλαια περί εγκάρσιας στατικής ευστάθειας (υποκεφάλαιο 4 στο Κεφ. 2) και δυναμικής ευστάθειας (Κεφάλαιο 5).
4.1.1.  :
Διαταραχή της πλάγιας δύναμης Ζ λόγω πλαγιολίσθησης
:
Διαταραχή της πλάγιας δύναμης Ζ λόγω πλαγιολίσθησης
Αυτή η δύναμη προκύπτει κατά κύριο λόγο από την άτρακτο, το κάθετο ουραίο πτερύγιο, την κύρια πτέρυγα (ειδικά από την πτέρυγα που έχει μεγάλη δίεδρη γωνία) και από τους κινητήρες, για αεροσκάφη που έχουν διαμόρφωση με εξωτερικά τοποθετημένους κινητήρες. Αυτή η παράγωγος είναι εξαιρετικά δύσκολο να υπολογιστεί, ενώ η απλή ανάλυση που ακολουθείται συνήθως υποθέτει ότι οι κύριες συνιστώσες της δύναμης αυτής προκύπτουν μόνο από την άτρακτο και το κάθετο ουραίο πτερύγιο.
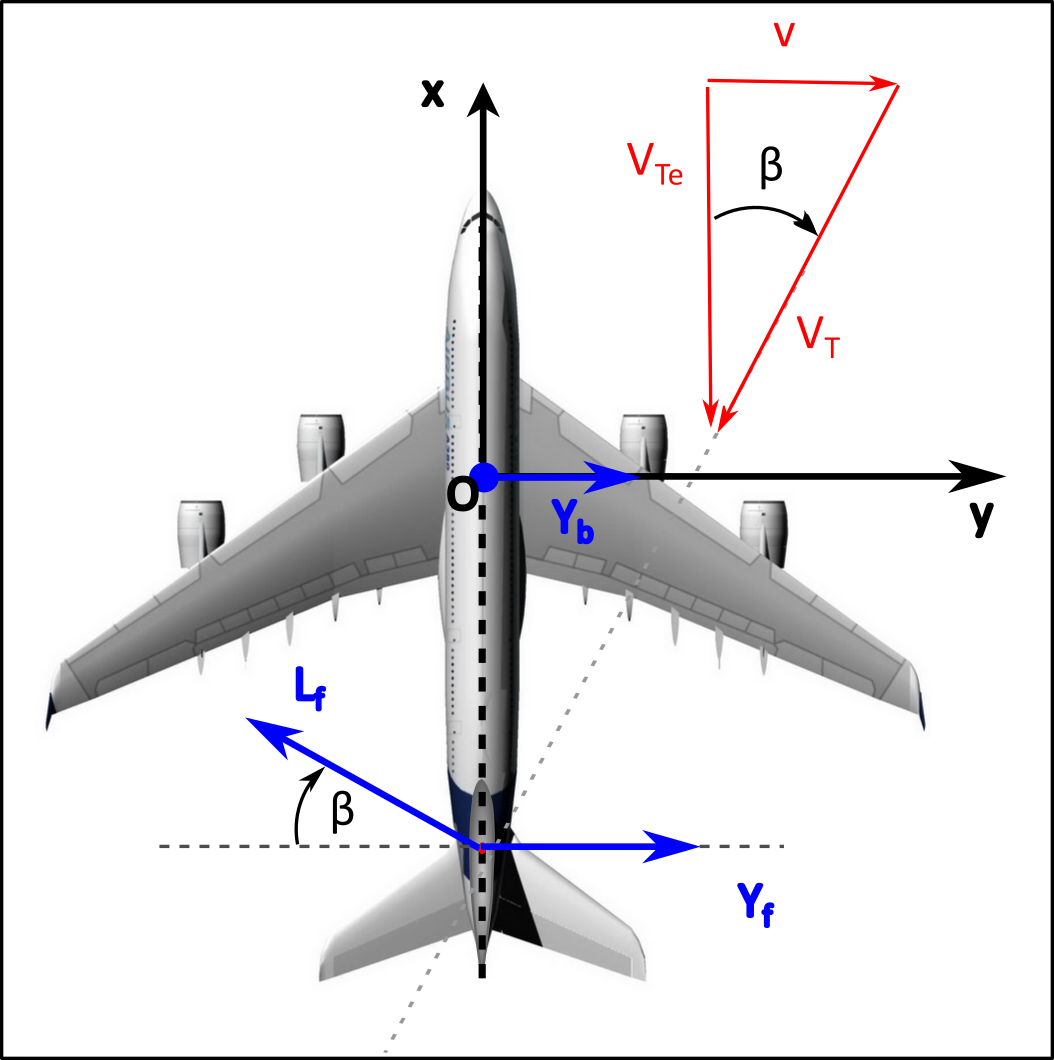
Σχήμα 6.5Διαταρχή της άνωσης στο κάθετο ουραίο πτερύγιο λόγω πλαγιολίσθησης
Σύμφωνα με το σχήμα 6.5 η άτρακτος προκαλεί μία πλάγια δύναμη Yb κατά την πλαγιολίσθηση, η οποία μπορεί να θεωρηθεί ως εγκάρσια οπισθέλκουσα και η οποία δίνεται από :
|
|
|
(6.65) |
H Sb είναι η προβαλλόμενη επιφάνεια του πλάγιου μέρους της ατράκτου και yb είναι ένας αδιάστατος συντελεστής, ώστε το γινόμενο βyb να είναι ισοδύναμο με έναν εγκάρσιο συντελεστή οπισθέλκουσας για την άτρακτο. Επίσης, για μικρές διαταραχές η γωνία β δίνεται από τη σχέση :
Κατά την πλαγιολίσθηση, το κάθετο ουραίο πτερύγιο βρίσκεται υπό γωνία πρόσπτωσης β και παράγει άνωση Lf όπως φαίνεται στο σχήμα. Η άνωση Lf του κάθετου ουραίου πτερύγιου μπορεί να αναλυθεί σε μία πλάγια δύναμη Yf που δίνεται από την:
|
|
|
(6.67) |
εφόσον cosβ ≈ 1, από τη στιγμή που η γωνία της πλαγιολίσθησης β είναι πολύ μικρή. Αν ορισθεί ως Υ η συνολική πλάγια δύναμη λόγω της πλαγιολίσθησης, τότε:
|
|
|
(6.68) |
Με αντικατάσταση της έκφρασης για τη γωνία β από την (6.66) στην
εξίσωση (6.68) η παράγωγος ευστάθειας ![]() προκύπτει
ως:
προκύπτει
ως:
|
|
|
(6.69) |
4.1.2.  :
Διαταραχή της ροπής περιστροφής λόγω πλαγιολίσθησης
:
Διαταραχή της ροπής περιστροφής λόγω πλαγιολίσθησης
Η ροπή ![]() ,
είναι μία από τις πιο σημαντικές εγκάρσιες παραγώγους ευστάθειας, μιας και
περιγράφει ποσοτικά την εγκάρσια στατική ευστάθεια του αεροσκάφους, όπως
συζητήθηκε στο υποκεφάλαιο 4 του Κεφ. 2. Ο
-έστω και προσεγγιστικός- υπολογισμός της είναι από τους πιο δύσκολους, αφού
αφενός είναι πολύ μικρή αριθμητικά, αφετέρου την επηρεάζουν πολλές και άγνωστες
μεταβλητές. Οι πιο απλοί υπολογισμοί περιλαμβάνουν τις επιδράσεις από τη δίεδρη
γωνία, την οπισθόκλιση των κύριων πτερύγων, τη γεωμετρία της πτέρυγας-ατράκτου
και το κάθετο ουραίο πτερύγιο.
,
είναι μία από τις πιο σημαντικές εγκάρσιες παραγώγους ευστάθειας, μιας και
περιγράφει ποσοτικά την εγκάρσια στατική ευστάθεια του αεροσκάφους, όπως
συζητήθηκε στο υποκεφάλαιο 4 του Κεφ. 2. Ο
-έστω και προσεγγιστικός- υπολογισμός της είναι από τους πιο δύσκολους, αφού
αφενός είναι πολύ μικρή αριθμητικά, αφετέρου την επηρεάζουν πολλές και άγνωστες
μεταβλητές. Οι πιο απλοί υπολογισμοί περιλαμβάνουν τις επιδράσεις από τη δίεδρη
γωνία, την οπισθόκλιση των κύριων πτερύγων, τη γεωμετρία της πτέρυγας-ατράκτου
και το κάθετο ουραίο πτερύγιο.
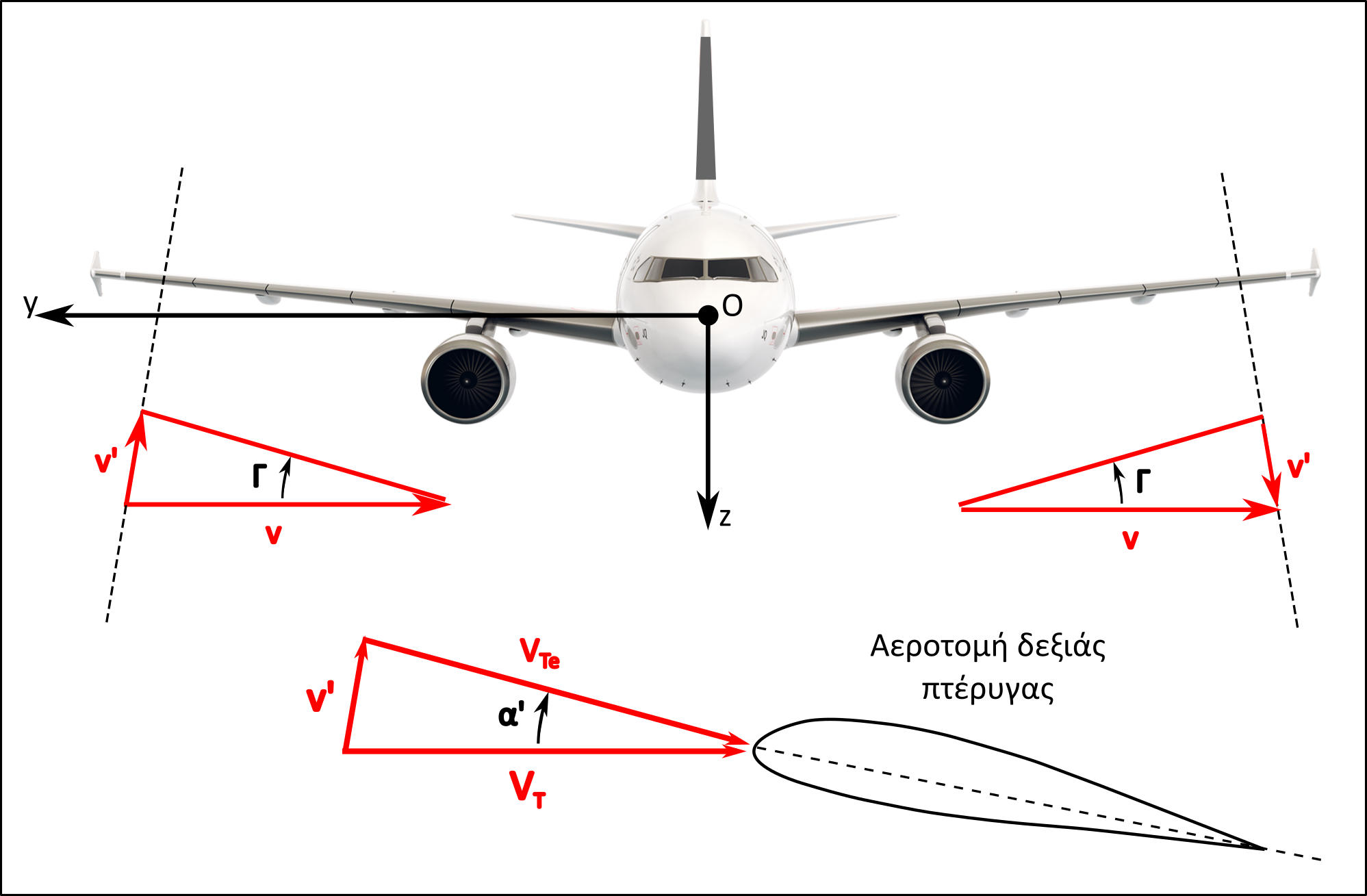
Σχήμα 6.6 Επίδραση της δίεδρης γωνίας στη διαταραχή των γωνιών πρόσπτωσης στη δεξιά και αριστερή κύρια πτέρυγα λόγω πλαγιολίσθησης
Σε πολλά κλασσικά αεροσκάφη ο πιο σημαντικός παράγοντας στη διαμόρφωση της παραγώγου είναι η δίεδρη γωνία των κύριων πτερύγων. Η δίεδρη γωνία αποτελεί πράγματι μία πολύ σημαντική μεταβλητή, με την οποία ο μηχανικός μπορεί να διαμορφώσει τα χαρακτηριστικά εγκάρσιας ευστάθειας του αεροσκάφους. Έτσι, αυτή η παράγωγος συχνά ονομάζεται επίδραση της δίεδρης (dihedral effect), ανεξάρτητα μάλιστα από το μέγεθος της επίδρασης των άλλων μεταβλητών που αναφέρθηκαν, στην ευστάθεια του αεροσκάφους. Από τη στιγμή που η τάση είναι η δεξιά πτέρυγα να χαμηλώνει για μια θετική διαταραχή πλαγιολίσθησης η επακόλουθη ροπή περιστροφής είναι επίσης θετική. Η σταθεροποιητική αεροδυναμική αντίδραση είναι εκείνη κατά την οποία η ροπή περιστροφής λόγω της πλαγιολίσθησης είναι αρνητική, αφού τότε θα αντιτίθεται στη ροπή που προκάλεσε τη διαταραχή. Κατά αυτή την έννοια η επίδρασης της δίεδρης γωνίας είναι πολύ χρήσιμη.
Σε μια θετική, λοιπόν, διαταραχή πλαγιολίσθησης προς τα δεξιά, η επίδραση της δίεδρης γωνίας είναι να αυξήσει τη γωνία πρόσπτωσης της δεξιάς πτέρυγας κάτι που απεικονίζεται στο σχήμα 6.6. Η αριστερή πτέρυγα βλέπει μια αντίστοιχη μείωση στη γωνία πρόσπτωσης. Έτσι, η ροπή περιστροφής προκαλείται από τη διαφορά άνωσης κατά μήκος του συνολικού εκπετάσματος (wing span) των πτερύγων. Σύμφωνα με το σχήμα, η συνιστώσα της ταχύτητας της πλαγιολίσθησης που είναι κάθετη στο επίπεδο των πτερύγων (wing panel) δίνεται ως:
|
|
|
(6.70) |
μιας και η δίεδρη γωνία Γ είναι συνήθως μικρή. Η συνιστώσα της ταχύτητας v' προκαλεί μια μικρή αύξηση στη γωνία πρόσπτωσης α':
|
|
|
(6.71) |
Στη συνέχεια εξετάζεται η άνωση λόγω της αύξησης στη γωνία πρόσπτωσης, στην απειροστή λωρίδα κατά την έννοια της χορδής (chord-wise strip), στη δεξιά πτέρυγα όπως φαίνεται στο επόμενο σχήμα 6.7. Η λωρίδα απέχει κατά y από τον άξονα Οx, έχει απειροστό πλάτος dy και τοπική χορδή cy . Η απειροστή αύξηση στην άνωση πάνω στη λωρίδα καταλήγει σε μία κάθετη δύναμη δΖ που δίνεται από:
|
|
|
(6.72) |
με αy την τοπική κλίση της καμπύλης της άνωσης.
Η αντίστοιχη αύξηση στη ροπή περιστροφής δL δίνεται ως:
|
|
|
(6.73) |
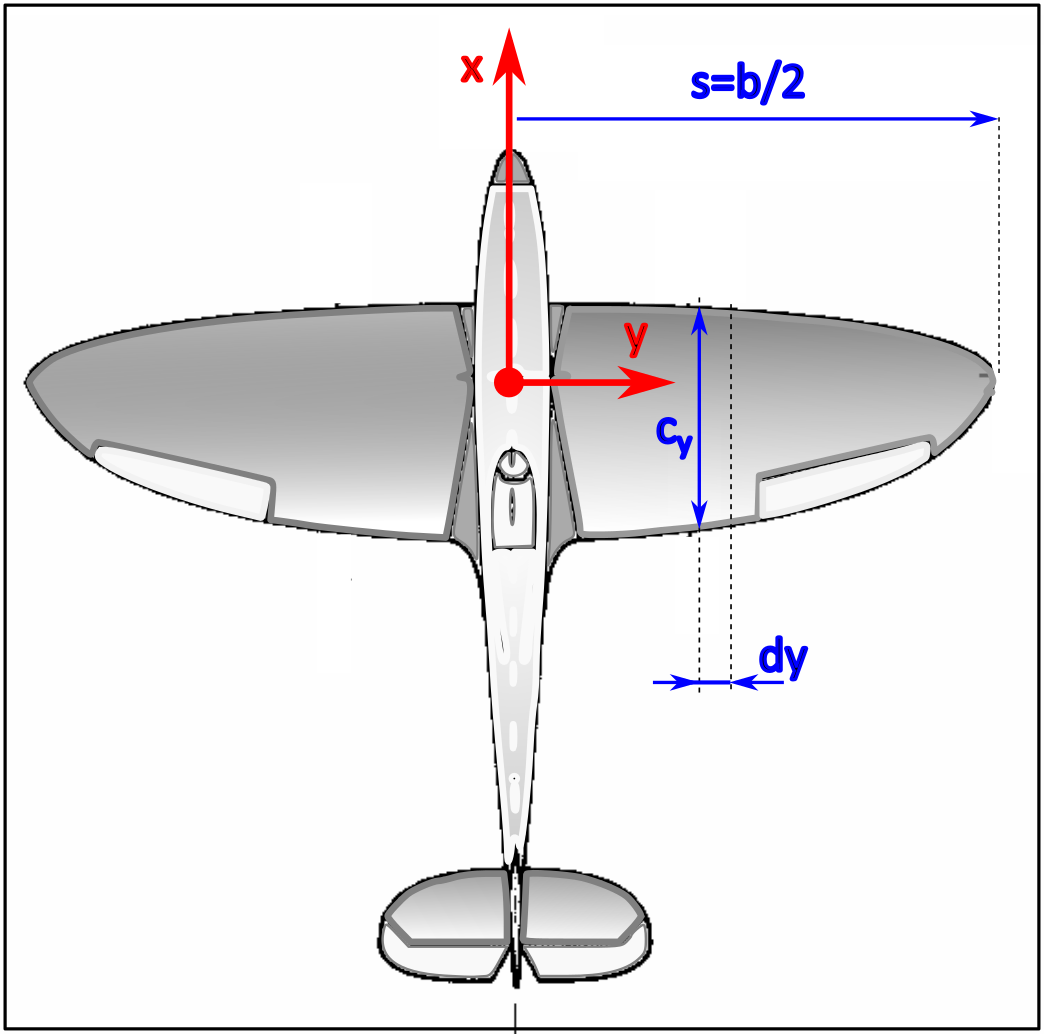
Σχήμα 6.7 Γεωμετρία και λωρίδες υπολογισμού της διαφοράς άνωσης στη δεξιά και αριστερή κύρια πτέρυγα λόγω πλαγιολίσθησης
Η συνολική ροπή διατοιχισμού που προκαλείται λόγω της δεξιάς πτέρυγας μπορεί να υπολογιστεί με ολοκλήρωση της (6.73) από τη βάση έως την άκρη της πτέρυγας:
|
|
|
(6.74) |
Αντίστοιχα για την αριστερή πτέρυγα :
|
|
|
(6.75) |
Σημειώνεται ότι για την αριστερή πτέρυγα το πρόσημο της κάθετης δύναμης αλλάζει επειδή η γωνία πρόσπτωσης μειώνεται, ενώ το ίδιο ισχύει και για το πρόσημο της ροπής. Έτσι:
|
|
|
(6.76) |
Εξορισμού η συνολική ροπή θα δίνεται από :
|
|
|
(6.77) |
Επομένως η επίδραση της δίεδρης γωνίας (dihedral) στην παράγωγο ευστάθειας είναι :
|
|
|
(6.78) |
Η οπισθόκλιση των πτερύγων, επηρεάζει επίσης σημαντικά την ![]() .
Η άνωση στην πτέρυγα που εκτρέπεται, καθορίζεται από τη συνιστώσα της ταχύτητας
που είναι κάθετη στο ¼ της χορδής (quarter-chord line)
στην υποηχητική πτήση, ενώ στην υπερηχητική πτήση καθορίζεται από τη συνιστώσα
της ταχύτητας που είναι κάθετη στο χείλος εκφυγής της πτέρυγας. Έτσι, η οπισθοκλινής
πτέρυγα αντιμετωπίζεται στην ουσία ως εκτρεπόμενη πτέρυγα.
.
Η άνωση στην πτέρυγα που εκτρέπεται, καθορίζεται από τη συνιστώσα της ταχύτητας
που είναι κάθετη στο ¼ της χορδής (quarter-chord line)
στην υποηχητική πτήση, ενώ στην υπερηχητική πτήση καθορίζεται από τη συνιστώσα
της ταχύτητας που είναι κάθετη στο χείλος εκφυγής της πτέρυγας. Έτσι, η οπισθοκλινής
πτέρυγα αντιμετωπίζεται στην ουσία ως εκτρεπόμενη πτέρυγα.
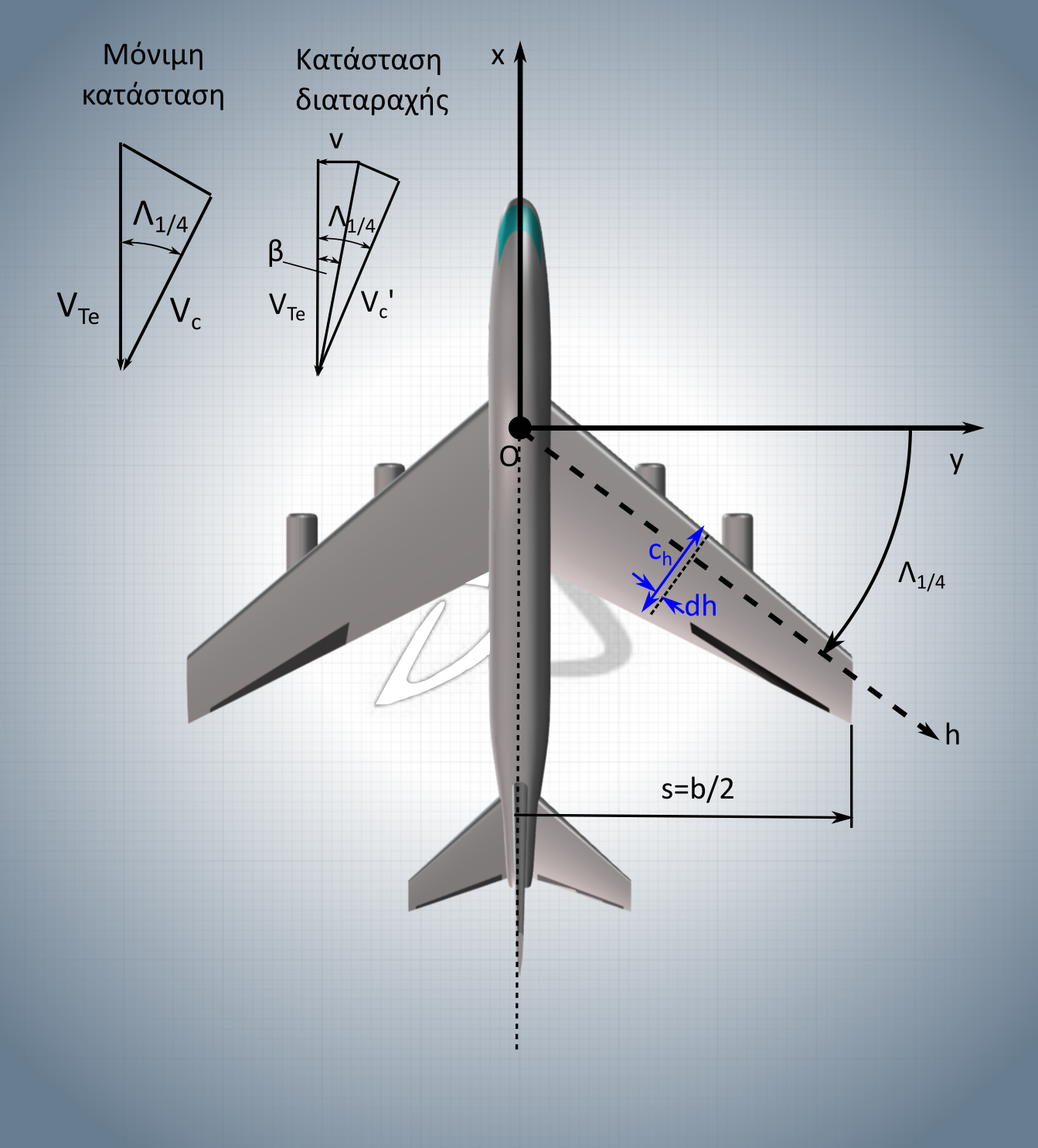
Σχήμα 6.8 Γεωμετρία και λωρίδες υπολογισμού της διαφοράς άνωσης στη δεξιά και αριστερή κύρια πτέρυγα λόγω πλαγιολίσθησης σε οπισθοκλινή πτέρυγα.
Σύμφωνα με το σχήμα 6.8 λαμβάνεται μία στοιχειώδης λωρίδα κατά μήκος της χορδής της δεξιάς πτέρυγας, η οποία είναι κάθετη στη γραμμή που διέρχεται από το ¼ των χορδών. Υποτίθενται υποηχητικές συνθήκες ροής, ενώ η διεύθυνση της ροής είναι παράλληλη με τη γραμμή της χορδής. Η στοιχειώδης λωρίδα βρίσκεται σε απόσταση h από τον άξονα Οx , η οποία μετράται πάνω στη γραμμή του ¼ των χορδών,. Η τοπική χορδή έχει μήκος ch και το πλάτος της λωρίδας είναι dh. Στη μόνιμη κατάσταση πτήσης αντισταθμισμένης ισορροπίας, η ταχύτητα κατά μήκος της χορδής θα δίνεται ως:
|
|
|
(6.79) |
Μετά την εφαρμογή μιας διαταραχής θετικής πλαγιολίσθησης, η σχέση (6.79) γίνεται:
|
|
|
(6.80) |
όπου με β συμβολίζεται η γωνία της πλαγιολίσθησης, η οποία εξ ορισμού είναι πολύ μικρή. Η στοιχειώδης κάθετη δύναμη δΖ στη λωρίδα λόγω της διαταραχής προκαλείται από τη διαφορά της άνωσης μεταξύ των μόνιμων συνθηκών πτήσης και των διαταραγμένων συνθηκών και δίνεται ως:
|
|
|
(6.81) |
Με αντικατάσταση των εκφράσεων για την ταχύτητα (6.79) και (6.80) στην εξίσωση (6.81) και με εφαρμογή προσεγγίσεων για τις μικρές διαταραχές προκύπτει:
|
|
|
(6.82) |
Έτσι, η αύξηση στη ροπή περιστροφής που προκύπτει είναι :
|
|
|
(6.83) |
Αντίστοιχα στην αριστερή πτέρυγα θα ισχύει :
|
|
|
(6.84) |
Έτσι, η αύξηση στη ροπή περιστροφής από την αριστερή πτέρυγα είναι :
|
|
|
(6.85) |

Η συνολική αύξηση στη ροπή περιστροφής προκύπτει από το άθροισμα της δεξιάς και της αριστερής πτέρυγας, δηλαδή τις εξισώσεις (6.83) και (6.85) και με αντικατάσταση του β από την (6.66), έτσι ώστε:
|
|
|
(6.86) |
Με ολοκλήρωση της σχέσης (6.86) από τη βάση έως την άκρη κατά μήκος της γραμμής του ¼ των χορδών προκύπτει:
|
|
|
(6.87) |
||
|
|
|
(6.88) |
||
Στη σχέση (6.88) είναι πιο βολικό να εκφρασθούν οι γεωμετρικές μεταβλητές ως προς τις παραμέτρους κατά την έννοια της χορδής και του εκπετάσματος, οι οποίες μετρούνται παράλληλα στους άξονες Οx και Οy αντίστοιχα. Η γεωμετρία της πτέρυγας καθορίζει ότι cy = chcosΛ1/4 , dy = dh cosΛ1/4 , y = hcosΛ1/4 και το όριο της ολοκλήρωσης από s·sec Λ1/4 γίνεται s. Έτσι, η εξίσωση (6.88) μπορεί να γίνει:
|
|
|
(6.89) |
όπου CLy = αhα είναι ο τοπικός συντελεστής άνωσης.
Για μεγαλύτερη ευκολία, μπορεί να υποτεθεί ένας σταθερός μέσος συντελεστής άνωσης για ολόκληρη την πτέρυγα και έτσι η εξίσωση (6.89) μπορεί να απλοποιηθεί περαιτέρω:
|
|
|
(6.90) |
Η γεωμετρία της πτέρυγας σε συνδυασμό με την άτρακτο, μπορεί να επηρεάσει σε σημαντικό βαθμό τον παράγοντα «επίδραση της δίεδρης» μιας και σε συνθήκες πλαγιολίσθησης η πλάγια ροή στην περιοχή της ρίζας της πτέρυγας προκαλεί διαφορική άνωση και η οποία με τη σειρά της προκαλεί ροπή περιστροφής.
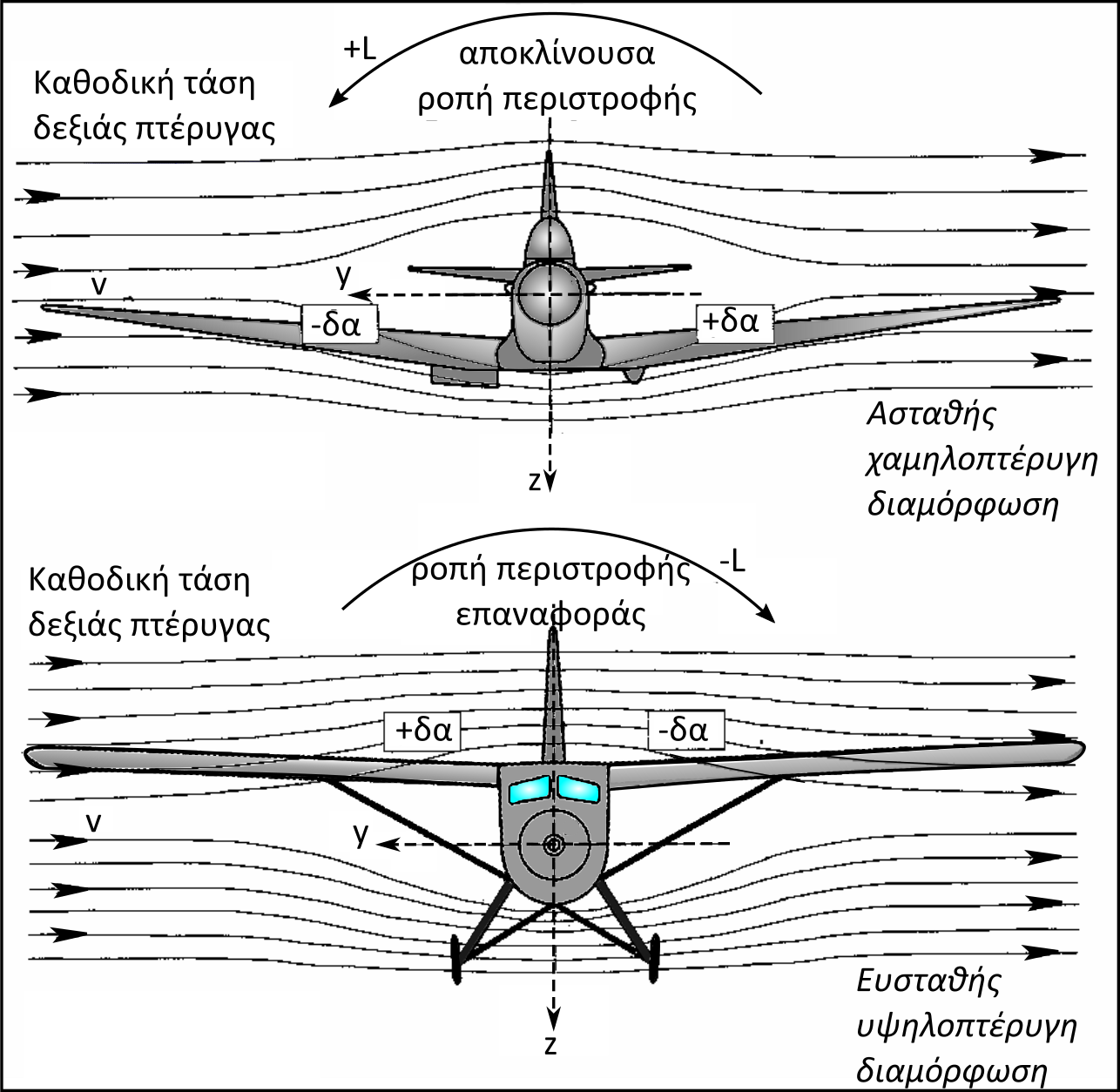
Σχήμα 6.9 Αστάθεια και ευστάθεια λόγω πλαγιολίσθησης σε χαμηλοπτέρυγο και υψηλοπτέρυγο αεροσκάφος
Όπως φαίνεται στο σχήμα 6.9, για θετική διαταραχή πλαγιολίσθησης το αεροσκάφος βλέπει την πλάγια συνιστώσα της ταχύτητας της πλαγιολίσθησης να «προσεγγίζει» από τα δεξιά, δηλαδή τη δεξιά πτέρυγα να ξεκινά την πτώση, καθώς εξελίσσεται η διαταραχή. Η εγκάρσια ροή του αέρα γύρω από την άτρακτο είναι περίπου όπως φαίνεται στο σχήμα, προκαλούνται δηλαδή διαταραχές στο κατώρευμα και στο ανώρευμα στην περιοχή της βάσης της πτέρυγας. Ως αποτέλεσμα των συνθηκών της ροής, το υψηλοπτέρυγο αεροσκάφος αντιμετωπίζει μια μεταβατική αύξηση στη γωνία πρόπτωσης στη ρίζα της δεξιάς πτέρυγας και μια αντίστοιχη μείωση στη ρίζα της αριστερής πτέρυγας. Η διαφορική άνωση προκαλεί αρνητική ροπή διατοιχισμού, η οποία λειτουργεί σταθεροποιητικά στο όλο φαινόμενο.
Αντίθετα, ένα αεροσκάφος με χαμηλοπτέρυγη διαμόρφωση συμπεριφέρεται με τον αντίθετο τρόπο: H ροπή διατοιχισμού λόγω της πλαγιολίσθησης είναι αποσταθεροποιητική. Έτσι, η υψηλοπτέρυγη διαμόρφωση, σε αντίθεση βέβαια με τη χαμηλοπτέρυγη διαμόρφωση, εκτός του σταθεροποιητικού αποτελέσματος του παράγοντα της δίεδρης γωνίας, προσφέρει ένα επιπλέον πλεονέκτημα λόγω του φαινομένου που μόλις περιγράφηκε.
Γενικά δεν είναι δυνατό να περιγραφούν ποσοτικά και με απλές αεροδυναμικές εκφράσεις τα αποτελέσματα της γεωμετρίας της ατράκτου-πτέρυγας στη ροπή περιστροφής λόγω της πλαγιολίσθησης. Τα αεροδυναμικά φαινόμενα που λαμβάνουν χώρα είναι αρκετά πολύπλοκα και δεν είναι δυνατόν να μοντελοποιηθούν με απλό τρόπο. Για παράδειγμα, είναι γνωστό ότι το μέγεθος των επιδράσεων μεγαλώνει με την αύξηση του πλάτους ή του βάθους της ατράκτου και με την αύξηση του λόγου επιμήκους.
Ο βαθμός κατά τον οποίο το κάθετο ουραίο πτερύγιο επηρεάζει τη ροπή περιστροφής λόγω της πλαγιολίσθησης ξεκινά από τον τρόπο με τον οποίο η άνωση που προκαλείται πάνω στην επιφάνειά του επηρεάζει την άτρακτο κατά τη διαταραχή της πλαγιολίσθησης. Η άνωση επιδρά πάνω στο αεροδυναμικό κέντρο του κάθετου σταθερού που με τη σειρά του μπορεί να βρίσκεται πάνω ή κάτω από τον άξονα περιστροφής και έτσι να προκαλεί ανάλογη ροπή.
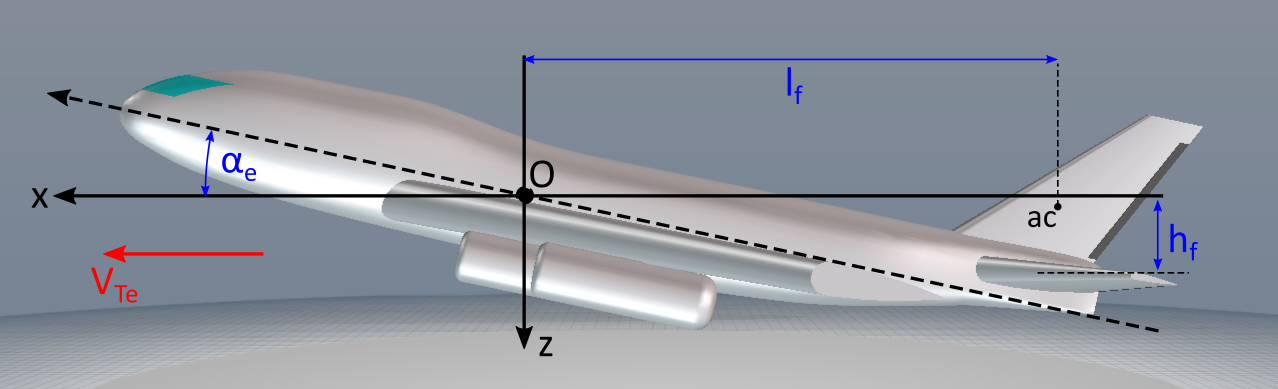
Σχήμα 6.10 Γεωμετρία διαμόρφωσης άνωσης στο κάθετο ουραίο πτερύγιο λόγω πλαγιολίσθησης.
Μία τυπική περίπτωση φαίνεται στο σχήμα 6.10. Η πλάγια δύναμη Υf, που είναι αποτέλεσμα της άνωσης που παράγεται στον κάθετο σταθερό λόγω της διαταραχής της πλαγιολίσθησης, δίνεται από την εξίσωση (6.67). Εάν ορισθεί ως hf η απόσταση του αεροδυναμικού κέντρου από τον άξονα διατοιχισμού (άξονας Οx) τότε κατά τη διαταραχή θα ισχύει:
|
|
|
(6.91) |
Με αντικατάσταση του β από την εξίσωση (6.66), προκύπτει η ακόλουθη έκφραση για την παράγωγο ευστάθειας :
|
|
|
(6.92) |
Ένας πρώτος υπολογισμός για την ολική τιμή της παραγώγου ![]() μπορεί
πλέον να πραγματοποιηθεί με απλή πρόσθεση όλων των συντελεστών που διαμορφώνουν
αυτή την παράγωγο, έτσι όπως αναπτύχθηκαν στις προηγούμενες παραγράφους. Η τιμή
της παραγώγου είναι συνήθως μικρή και αρνητική δηλαδή σταθεροποιητική ενώ ακόμη
και μικρά σφάλματα στον υπολογισμό της τιμής της μπορεί να οδηγήσουν σε
εσφαλμένα συμπεράσματα. Αν και, όπως αναλύθηκε, είναι εξαιρετικά δύσκολο να
υπολογισθούν όλοι οι συντελεστές που διαμορφώνουν την ολική τιμή αυτής της
παραγώγου (αφού εδώ περιλαμβάνονται μερικά από τα πιο πολύπλοκα αεροδυναμικά
φαινόμενα συγκριτικά με τις υπόλοιπες παραγώγους) είναι δυνατό να προκύψει ακριβής
ανάλυση για τα παραπάνω φαινόμενα από σύνθετη υπολογιστική προσομοίωση, από μετρήσεις
σε αεροσήραγγα ή από έτοιμες βάσεις δεδομένων, ή από πτητικές δοκιμές.
μπορεί
πλέον να πραγματοποιηθεί με απλή πρόσθεση όλων των συντελεστών που διαμορφώνουν
αυτή την παράγωγο, έτσι όπως αναπτύχθηκαν στις προηγούμενες παραγράφους. Η τιμή
της παραγώγου είναι συνήθως μικρή και αρνητική δηλαδή σταθεροποιητική ενώ ακόμη
και μικρά σφάλματα στον υπολογισμό της τιμής της μπορεί να οδηγήσουν σε
εσφαλμένα συμπεράσματα. Αν και, όπως αναλύθηκε, είναι εξαιρετικά δύσκολο να
υπολογισθούν όλοι οι συντελεστές που διαμορφώνουν την ολική τιμή αυτής της
παραγώγου (αφού εδώ περιλαμβάνονται μερικά από τα πιο πολύπλοκα αεροδυναμικά
φαινόμενα συγκριτικά με τις υπόλοιπες παραγώγους) είναι δυνατό να προκύψει ακριβής
ανάλυση για τα παραπάνω φαινόμενα από σύνθετη υπολογιστική προσομοίωση, από μετρήσεις
σε αεροσήραγγα ή από έτοιμες βάσεις δεδομένων, ή από πτητικές δοκιμές.
4.1.3 .:
Διαταραχή της ροπής εκτροπής λόγω πλαγιολίσθησης
.:
Διαταραχή της ροπής εκτροπής λόγω πλαγιολίσθησης
Η «ανεμουριακή» συμπεριφορά ή διαφορετικά η στατική ευστάθεια ως προς τη διεύθυνση, καθορίζεται από την παράγωγο της ροπής εκτροπής λόγω της πλαγιολίσθησης. Αυτή περιγράφει ποσοτικά την τάση του αεροσκάφους να στρέφει την κεφαλή του προς τον άνεμο μετά από την εμφάνιση της διαταραχής της πλαγιολίσθησης. Η στατική ευστάθεια ως προς τη διεύθυνση περιγράφηκε στο υποκεφάλαιο 4 του κεφ.2.
Κατά τη διάρκεια της διαταραχής, η αύξηση της άνωσης λόγω των παραγόντων που αναφέρθηκαν νωρίτερα, δηλαδή της δίεδρης γωνίας, της οπισθόκλισης, της γεωμετρίας ατράκτου-πτέρυγας κλπ., προκαλούν και ανάλογη αύξηση στην επαγόμενη οπισθέλκουσα. Η διαφορική οπισθέλκουσα κατά μήκος του εκπετάσματος επηρεάζει με τη σειρά της τη ροπή εκτροπής λόγω της πλαγιολίσθησης. Βέβαια τις περισσότερες φορές αυτά τα φαινόμενα θεωρούνται αμελητέα σε σχέση με αυτά που προκαλούνται λόγω του κάθετου σταθερού-τουλάχιστον για τον προκαταρκτικό σχεδιασμό. Ας σημειωθεί ότι στην πράξη αυτά τα φαινόμενα μπορεί να είναι αρκετά σημαντικά και εφόσον αγνοηθούν θα εισάγουν σημαντικό βαθμό ανακρίβειας στη συνέχεια των υπολογισμών.
Εάν σύμφωνα με τα σχήματα 6.5-6.10 θεωρηθεί μόνον η επίδραση του κάθετου ουραίου πτερύγιου, η ροπή εκτροπής που προκαλείται από την πλάγια δύναμη Υf , λόγω της άνωσης στο κάθετο ουραίο πτερύγιο [σχέση (6.67)], μπορεί να περιγραφεί ποσοτικά ως ακολούθως:
|
|
|
(6.93) |
Με αντικατάσταση του β από την εξίσωση (6.66), προκύπτει η εξής έκφραση για την παράγωγο ευστάθειας:
|
|
|
(6.94) |
Σημειώνεται ότι το πρόσημο της![]() είναι
θετικό, δηλαδή είναι σταθεροποιητική. Κατά τη θετική πλαγιολίσθηση η σχετική
ταχύτητα του αέρα έρχεται από τα δεξιά του ρύγχους του αεροσκάφους (βλ. σχήμα 6.5)
και η σταθεροποιητική ροπή λόγω της πλαγιολίσθησης τείνει να εκτρέψει το
αεροσκάφος δεξιόστροφα, έως ότου το ρύγχος ευθυγραμμιστεί με το σχετικό άνεμο.
Έτσι, το αρνητικό αποτέλεσμα λόγω της πλαγιολίσθησης τείνει να μηδενιστεί. Επίσης,
συνήθως σταθεροποιητικό είναι και το αποτέλεσμα της διαφορικής οπισθέλκουσας
πάνω στις πτέρυγες του αεροσκάφους, το οποίο μπορεί να επηρεάσει σημαντικά τα
χαρακτηριστικά του αεροσκάφους σε υψηλές γωνίες πρόσπτωσης, μιας και ένα μεγάλο
μέρος του κάθετου ουραίου πτερύγιου μπορεί να βρεθεί μέσα στην ανώμαλη ροή (wake) των κύριων πτερύγων και επομένως να χάσει την
αποτελεσματικότητά του.
είναι
θετικό, δηλαδή είναι σταθεροποιητική. Κατά τη θετική πλαγιολίσθηση η σχετική
ταχύτητα του αέρα έρχεται από τα δεξιά του ρύγχους του αεροσκάφους (βλ. σχήμα 6.5)
και η σταθεροποιητική ροπή λόγω της πλαγιολίσθησης τείνει να εκτρέψει το
αεροσκάφος δεξιόστροφα, έως ότου το ρύγχος ευθυγραμμιστεί με το σχετικό άνεμο.
Έτσι, το αρνητικό αποτέλεσμα λόγω της πλαγιολίσθησης τείνει να μηδενιστεί. Επίσης,
συνήθως σταθεροποιητικό είναι και το αποτέλεσμα της διαφορικής οπισθέλκουσας
πάνω στις πτέρυγες του αεροσκάφους, το οποίο μπορεί να επηρεάσει σημαντικά τα
χαρακτηριστικά του αεροσκάφους σε υψηλές γωνίες πρόσπτωσης, μιας και ένα μεγάλο
μέρος του κάθετου ουραίου πτερύγιου μπορεί να βρεθεί μέσα στην ανώμαλη ροή (wake) των κύριων πτερύγων και επομένως να χάσει την
αποτελεσματικότητά του.
Ένας άλλος παράγοντας που μπορεί να είναι σημαντικός για την εγκάρσια συμπεριφορά του αεροσκάφους αποτελεί και η κάθετη οπισθέλκουσα στην πλάγια επιφάνεια του αεροσκάφους μπροστά αλλά και πίσω από το κέντρο βάρους Ο. Συχνά η ροπή εκτροπής λόγω της πλαγιολίσθησης που προκαλείται από την πλάγια επιφάνεια του αεροσκάφους είναι αρνητική και έτσι αποσταθεροποιητική. Για ορισμένες κλάσεις αεροσκαφών, όπως για παράδειγμα τα μεγάλα μεταφορικά, αυτός ο παράγοντας μπορεί να είναι τόσο σημαντικός, ώστε να απαιτηθεί η ύπαρξη ενός πολύ μεγάλου, κάθετου σταθερού για να επιτευχθεί ικανοποιητική ευστάθεια διεύθυνσης.
4.2. Παράγωγοι λόγω του ρυθμού περιστροφής (κλίσης)
Όπως έχει ήδη αναφερθεί, η θετική περιστροφή του αεροσκάφους σε σχέση με τον πιλότο είναι η δεξιόστροφη με τη δεξιά πτέρυγα να κατεβαίνει. Η αντίστοιχη μεταβλητή των μικρών διαταραχών (διαταραχή περιστροφής) συμβολίζεται με το p. Η φύση της περιστροφής είναι τέτοια ώστε, καθώς η δεξιά πτέρυγα χαμηλώνει, το ρύγχος του αεροσκάφους έχει την τάση να κινηθεί δεξιά, ενώ το ίδιο το αεροσκάφος έχει την τάση να ολισθήσει δεξιά. Η αντίδραση στη διαταραχή θα είναι σταθεροποιητική εφόσον οι αεροδυναμικές δυνάμεις και ροπές τείνουν να επαναφέρουν το αεροσκάφος σε οριζόντια (wings level) πτήση ισορροπίας χωρίς εκτροπή του ρύγχους του.
4.2.1.  :
Διαταραχή της πλάγιας δύναμης λόγω διαταραχής του ρυθμού περιστροφής
:
Διαταραχή της πλάγιας δύναμης λόγω διαταραχής του ρυθμού περιστροφής
Η πλάγια δύναμη λόγω του ρυθμού περιστροφής συνήθως θεωρείται ότι είναι αμελητέου μεγέθους, εκτός από τα αεροσκάφη με κάθετο ουραίο πτερύγιο μεγάλου λόγου επιμήκους. Ακόμη και τότε η επίδραση μπορεί να είναι πολύ μικρή. Έτσι, το κάθετο ουραίο πτερύγιο θεωρείται ότι αποτελεί τον μόνο σημαντικό παράγοντα για τη διαμόρφωση αυτής της παραγώγου.
Με βάση το σχήμα 6.11, λαμβάνεται λωρίδα πλάτους dh και τετμημένης h κατά μήκος της χορδής στο κάθετο ουραίο πτερύγιο, η οποία μετράται προς τα πάνω κατά μήκος του άξονα Οx. Όταν το αεροσκάφος υφίσταται μία θετική διαταραχή p, η λωρίδα βλέπει μία πλάγια συνιστώσα της ταχύτητας ph. Η ολική ταχύτητα VT που «βλέπει» το κάθετο σταθερό βρίσκεται σε γωνία πρόσπτωσης α΄ και βέβαια είναι πολύ μικρή ώστε:
|
|
|
(6.95) |
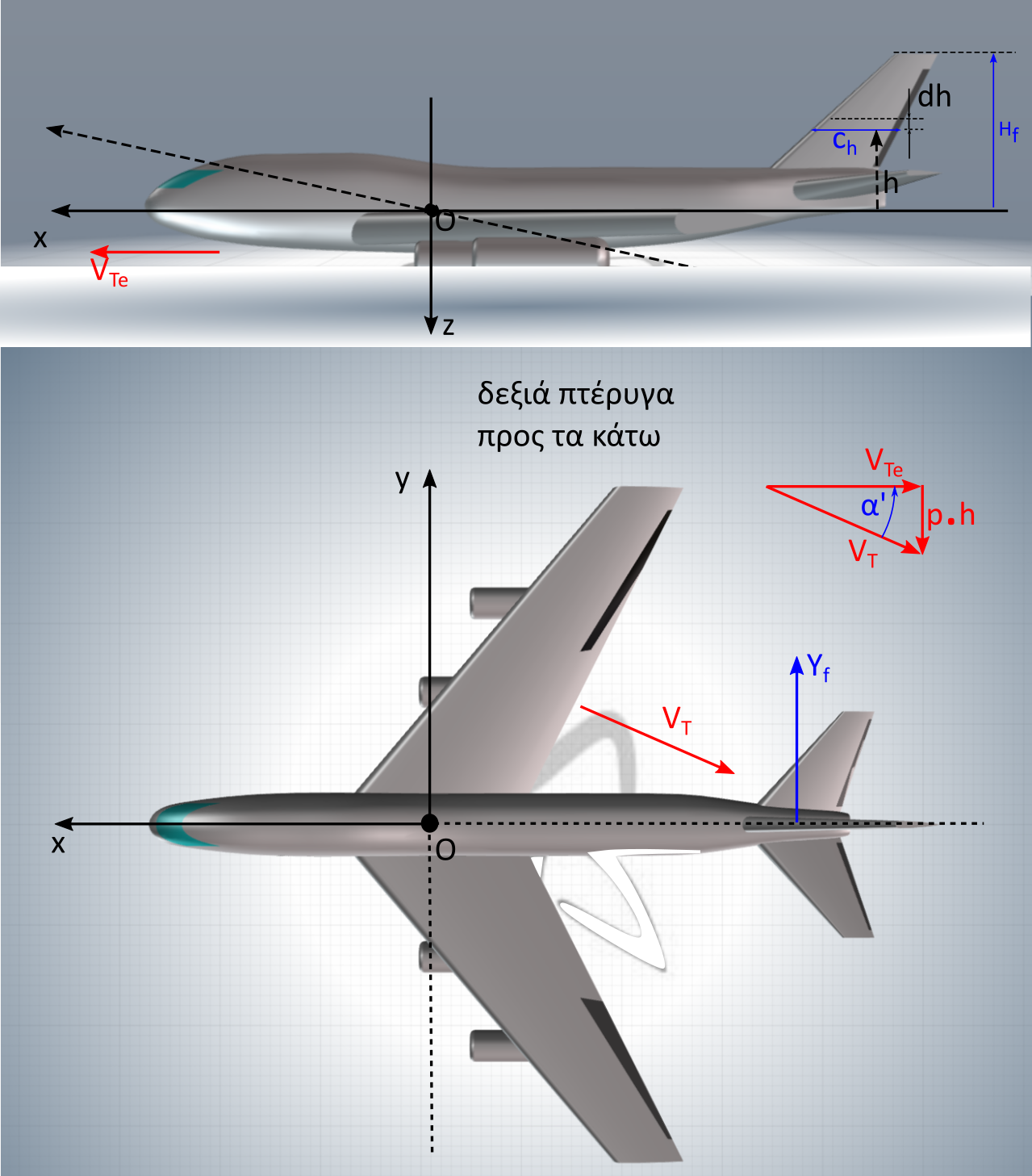
Σχήμα 6.11 Γεωμετρία και λωρίδες υπολογισμού άνωσης στο κάθετο ουραίο πτερύγιο λόγω διαταραχής του ρυθμού περιστροφής.
Ως επακόλουθο, προκαλείται άνωση στο κάθετο ουραίο πτερύγιο, η οποία έχει σαν συνιστώσα μία εγκάρσια στοιχειώδη δύναμη δΥ που εφαρμόζεται στη λωρίδα και δίνεται από τη σχέση:
|
|
|
(6.96) |
όπου αh είναι η τοπική κλίση της καμπύλης της άνωσης και ch είναι το μήκος της τοπικής χορδής.
Η ολική πλάγια δύναμη που επιδρά στο κάθετο σταθερό δίνεται μετά από ολοκλήρωση της πιο πάνω σχέσης, από τη βάση έως την άκρη του πτερυγίου:
|
|
|
(6.97) |
όπου Hf είναι το εκπέτασμα του κάθετου σταθερού που μετριέται από τον άξονα Οx.
Η έκφραση για την επίδραση του κάθετου σταθερού πάνω στην παράγωγο ευστάθειας θα είναι:
|
|
|
(6.98) |
4.2.2.  :
Διαταραχή της ροπής περιστροφής λόγω διαταραχής του ρυθμού περιστροφής
:
Διαταραχή της ροπής περιστροφής λόγω διαταραχής του ρυθμού περιστροφής
Η σημαντικότερη συμβολή σε αυτή τη ροπή προκύπτει από την κύρια πτέρυγα, ενώ λιγότερο συντελούν η άτρακτος, το οριζόντιο και το κάθετο, ουραίο πτερύγιο. Η παράγωγος αυτή είναι πολύ σημαντική αφού περιγράφει ποσοτικά την απόσβεση στην περιστροφή και επομένως χαρακτηρίζει τη δυναμική μορφή της υποχώρησης της περιστροφής που συζητήθηκε στο υποκεφάλαιο 3.1 του Κεφ. 5. Στη συνέχεια επόμενα θα θεωρηθεί ότι ο κύριος παράγοντας διαμόρφωσης αυτής της παραγώγου είναι η κύρια πτέρυγα.
Σύμφωνα με το σχήμα 6.12, όταν η δεξιά πτέρυγα συναντά μια θετική διαταραχή στον ρυθμό περιστροφής p και υποθέτοντας ότι το αεροσκάφος περιστρέφεται γύρω από τον άξονα Οx, τότε η μικρή αύξηση στη γωνία πρόσπτωσης α' στη λωρίδα κατά μήκος της χορδής θα δίνεται από:
Υφίσταται βέβαια αντίστοιχη μείωση στη γωνία πρόσπτωσης στην αριστερή πτέρυγα. Συμβολίζοντας με L' και D' τη συνολική αύξηση στην άνωση και την οπισθέλκουσα κατά τη διαταραχή στη στοιχειώδη λωρίδα, τότε :
|
|
|
(6.100) |
και
|
|
|
(6.101) |
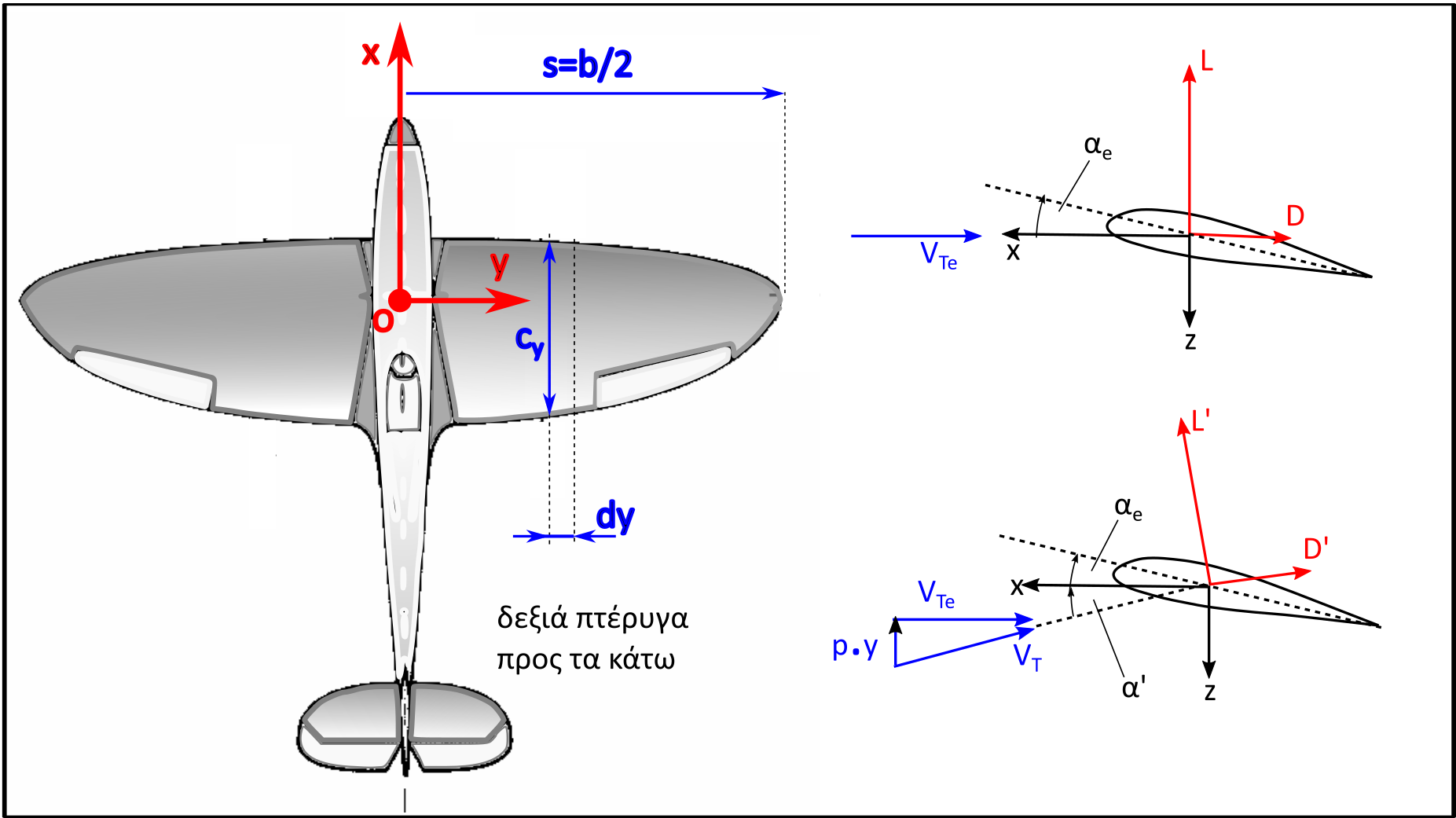
Σχήμα 6.12 Γεωμετρία και λωρίδες υπολογισμού άνωσης στη δεξιά και αριστερή κύρια πτέρυγα λόγω διαταραχής του ρυθμού περιστροφής
Η στοιχειώδης αύξηση στην κάθετη δύναμη δΖ (δεξιά) που επενεργεί στη δεξιά λωρίδα κατά τη διαταραχή δίνεται από :
|
|
|
(6.102) |
αφού η α΄ είναι μικρή γωνία.
Με αντικατάσταση του L', D' και α' από τις εξισώσεις (6.101), (6.102) και (6.99) προκύπτει:
|
|
|
(6.103) |
Έτσι, η αντίστοιχη αύξηση στη ροπή περιστροφής δίνεται από :
|
|
|
(6.104) |
και η αντίστοιχη αύξηση στη ροπή περιστροφής που προκύπτει από την αριστερή πτέρυγα, (εκεί όπου η γωνία πρόσπτωσης μειώνεται κατά α΄ αφού η πτέρυγα ανέρχεται) σε σχέση με τη ροή δίνεται από :
|
|
|
(6.105) |
Η συνολική ροπή περιστροφής, φυσικά, θα δίνεται από το άθροισμα των δύο παραπάνω ποσοτήτων και με ολοκλήρωση τους από τη βάση έως την άκρη του πτερύγιου:
|
|
|
(6.106) |
και εφόσον εξ ορισμού:
|
|
|
(6.107) |
η παράγωγος ευστάθειας θα δίνεται από τη σχέση :
|
|
|
(6.108) |
4.2.3.  :
Διαταραχή της ροπής εκτροπής λόγω διαταραχής του ρυθμού περιστροφής
:
Διαταραχή της ροπής εκτροπής λόγω διαταραχής του ρυθμού περιστροφής
H ροπή εκτροπής λόγω του ρυθμού περιστροφής διαμορφώνεται εξολοκλήρου από την κύρια πτέρυγα, αν και σε ορισμένα αεροσκάφη ένα μεγάλο κάθετο ουραίο πτερύγιο μπορεί να επηρεάσει σημαντικά αυτήν την παράγωγο. Η παρούσα ανάλυση θα λάβει υπόψη της μόνο την πτέρυγα του αεροσκάφους.
Με τη βοήθεια του σχήματος 6.12 υπολογίσθηκε στις εξισώσεις (6.100) και (6.101) η αύξηση στην άνωση και στην επαγόμενη οπισθέλκουσα της δεξιάς πτέρυγας κατά τη διαταραχή p του ρυθμού περιστροφής. Αντίστοιχα, προκύπτει και η αντίστοιχη μείωση στην αριστερή πτέρυγα. Έτσι, η διαφορά στην οπισθέλκουσα θα προκαλέσει τη διαταραχή της ροπής εκτροπής. Σύμφωνα λοιπόν με το σχήμα 6.12, η διαμήκης αύξηση στην αξονική δύναμη που επιδρά στη λωρίδα κατά μήκος της χορδής της δεξιάς πτέρυγας, θα δίνεται από:
|
|
|
(6.109) |
Με αντικατάσταση του L' και του D' από τις εξισώσεις (6.100) και (6.101) και χρησιμοποιώντας τον συμβολισμό:
|
|
|
(6.110) |
προκύπτει:
|
|
|
(6.111) |
Η στοιχειώδης αυτή αύξηση στην αξονική δύναμη προκαλεί με τη σειρά της μια αύξηση στη ροπή εκτροπής κατά :
|
|
|
(6.112) |
Η μείωση στη γωνία πρόσπτωσης στην αριστερή πτέρυγα λόγω του ρυθμού περιστροφής p προκαλεί θετική αύξηση στη ροπή εκτροπής ενώ με ανάλογο τρόπο μπορεί να δειχτεί ότι:
|
|
|
(6.113) |
Η ολική στοιχειώδης αύξηση στη ροπή εκτροπής θα δίνεται από το άθροισμα της (6.112) και (6.113) με αντικατάσταση α΄ από την (6.99), δηλαδή :
|
|
|
(6.114) |
Έτσι, η ολική ροπή εκτροπής λόγω του ρυθμού περιστροφής p δίνεται από :
|
|
|
(6.115) |
και τελικά:
|
|
|
(6.116) |
όπου ![]() είναι
ο τοπικός συντελεστής άνωσης σε κατάσταση ισορροπίας.
είναι
ο τοπικός συντελεστής άνωσης σε κατάσταση ισορροπίας.
4.3. Παράγωγοι λόγω του ρυθμού εκτροπής
Ως θετική εκτροπή ορίζεται η κίνηση του ρύγχους του αεροσκάφους προς δεξιά σε σχέση με τον πιλότο του αεροσκάφους, ενώ η μεταβλητή που αντιστοιχεί στο ρυθμό εκτροπής συμβολίζεται r. Η φύση της ελεύθερης θετικής διαταραχής του ρυθμού εκτροπής είναι τέτοια ώστε, καθώς η κεφαλή του αεροσκάφους εκτρέπεται δεξιά, η δεξιά πτέρυγα χαμηλώνει προς τα κάτω σε σχέση με τον ορίζοντα, ενώ το αεροσκάφος πλαγιολισθαίνει προς τα δεξιά. Η αντίδραση στη διαταραχή θα είναι σταθεροποιητική εφόσον οι αεροδυναμικές δυνάμεις και ροπές που προκαλούνται σε αντίδραση επαναφέρουν το αεροσκάφος σε συμμετρική οριζόντια πτήση ισορροπίας.
4.3.1.  :
Διαταραχή της πλάγιας δύναμης λόγω διαταραχής του ρυθμού εκτροπής
:
Διαταραχή της πλάγιας δύναμης λόγω διαταραχής του ρυθμού εκτροπής
Για τα περισσότερα συμβατικά αεροσκάφη η πλάγια δύναμη λόγω του ρυθμού εκτροπής είναι αμελητέα εκτός από τις περιπτώσεις με σχετικά μεγάλο κάθετο ουραίο πτερύγιο. Σ' αυτή την περίπτωση η άνωση που παράγεται στο κάθετο ουραίο πτερύγιο λόγω της εκτροπής προκαλεί πλάγια δύναμη σημαντικού μεγέθους.
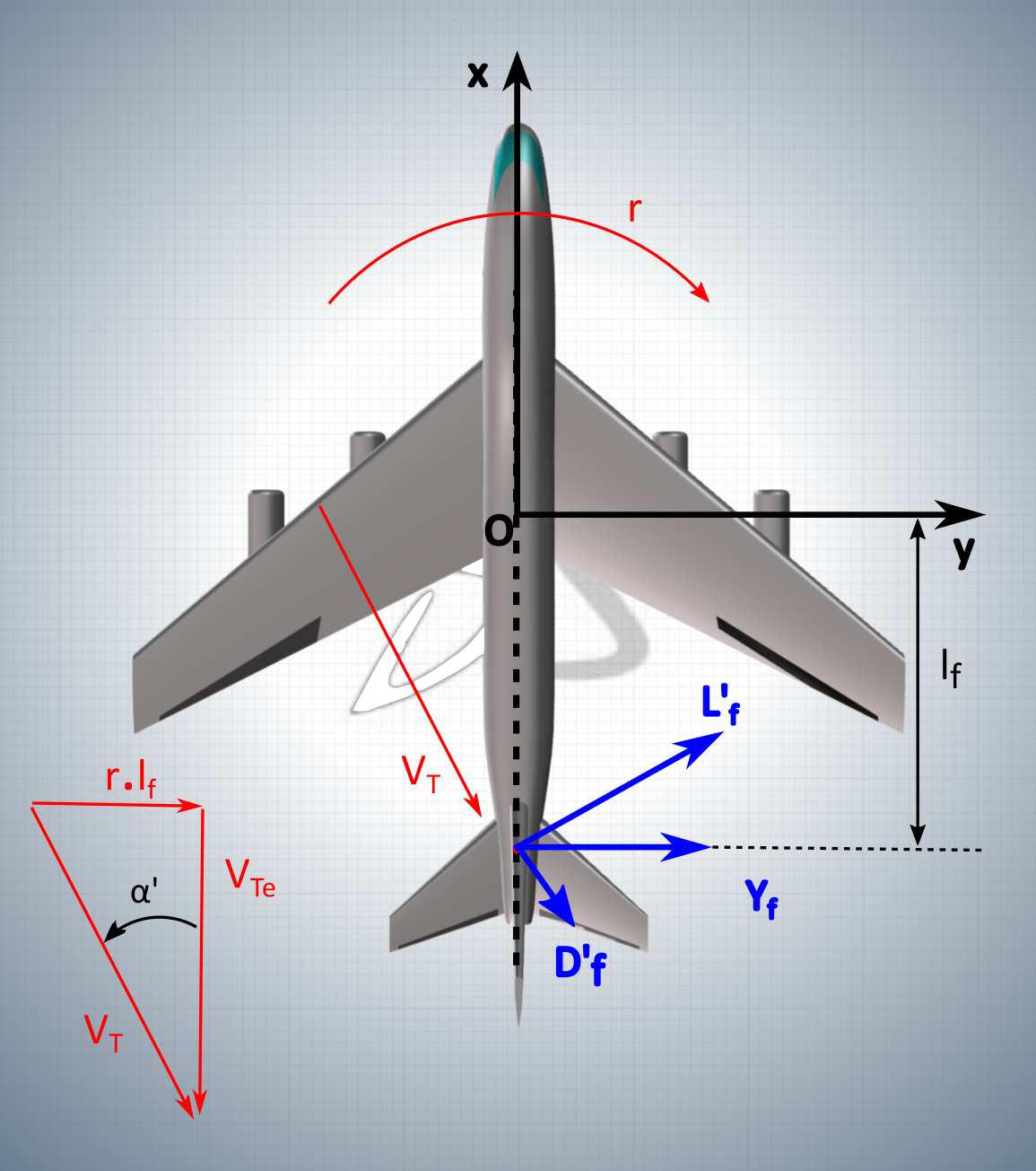
Σχήμα 6.13 Γεωμετρία διαμόρφωσης άνωσης στο κάθετο ουραίο πτερύγιο λόγω εκτροπής
Σύμφωνα με το σχήμα 7.13, η μεταβατική γωνία πρόσπτωσης στο κάθετο ουραίο πτερύγιο κατά τη διαταραχή του ρυθμού εκτροπής μπορεί να γραφεί :
|
|
|
(6.117) |
όπου με lf συμβολίζεται η απόσταση ανάμεσα στον άξονα εκτροπής δηλαδή το κέντρο βάρους Ο και το σημείο εφαρμογής της άνωσης στο κάθετο σταθερό, ενώ η γωνία πρόσπτωσης α΄ θα είναι βέβαια μικρή γωνία.
Η άνωση στο κάθετο σταθερό Lf'προκαλεί όπως αναφέρθηκε την πλάγια δύναμη Yf.
|
|
|
(6.118) |
έτσι:
|
|
|
(6.119) |
Επομένως η έκφραση για την παράγωγο ευστάθειας της πλάγιας δύναμης λόγω του ρυθμού εκτροπής θα δίνεται από τη σχέση :
|
|
|
(6.120) |
Φυσικά η συνιστώσα της αεροδυναμικής δύναμης D'F συντελεί στη διαμόρφωση της πλάγιας δύναμης, όμως σε σχέση με την επίδραση της άνωσης, όπως αναλύθηκε παραπάνω, θεωρείται πολύ μικρή και επομένως αμελητέα.
4.3.2.  :
Διαταραχή της ροπής περιστροφής λόγω διαταραχής του ρυθμού εκτροπής
:
Διαταραχή της ροπής περιστροφής λόγω διαταραχής του ρυθμού εκτροπής
Κατά τη θετική εκτροπή r η σχετική ταχύτητα του αέρα που ρέει πάνω από τη δεξιά πτέρυγα μειώνεται ενώ στην αριστερή πτέρυγα αυξάνεται. Αυτό με τη σειρά του προκαλεί αύξηση στην άνωση και στην επαγόμενη οπισθέλκουσα της αριστερής πτέρυγας και αντίστοιχη μείωση στη δεξιά πτέρυγα. Επομένως οι δυνάμεις που αναπτύσσονται προκαλούν ροπή περιστροφής και ροπή εκτροπής γύρω από το κέντρο βάρους O. Φυσικά και το κάθετο ουραίο πτερύγιο με τη σειρά του προκαλεί πλάγια δύναμη και ανάλογη ροπή περιστροφής αν και γενικά είναι μικρότερου μεγέθους σε σχέση με την επίδραση της κύριας πτέρυγας.
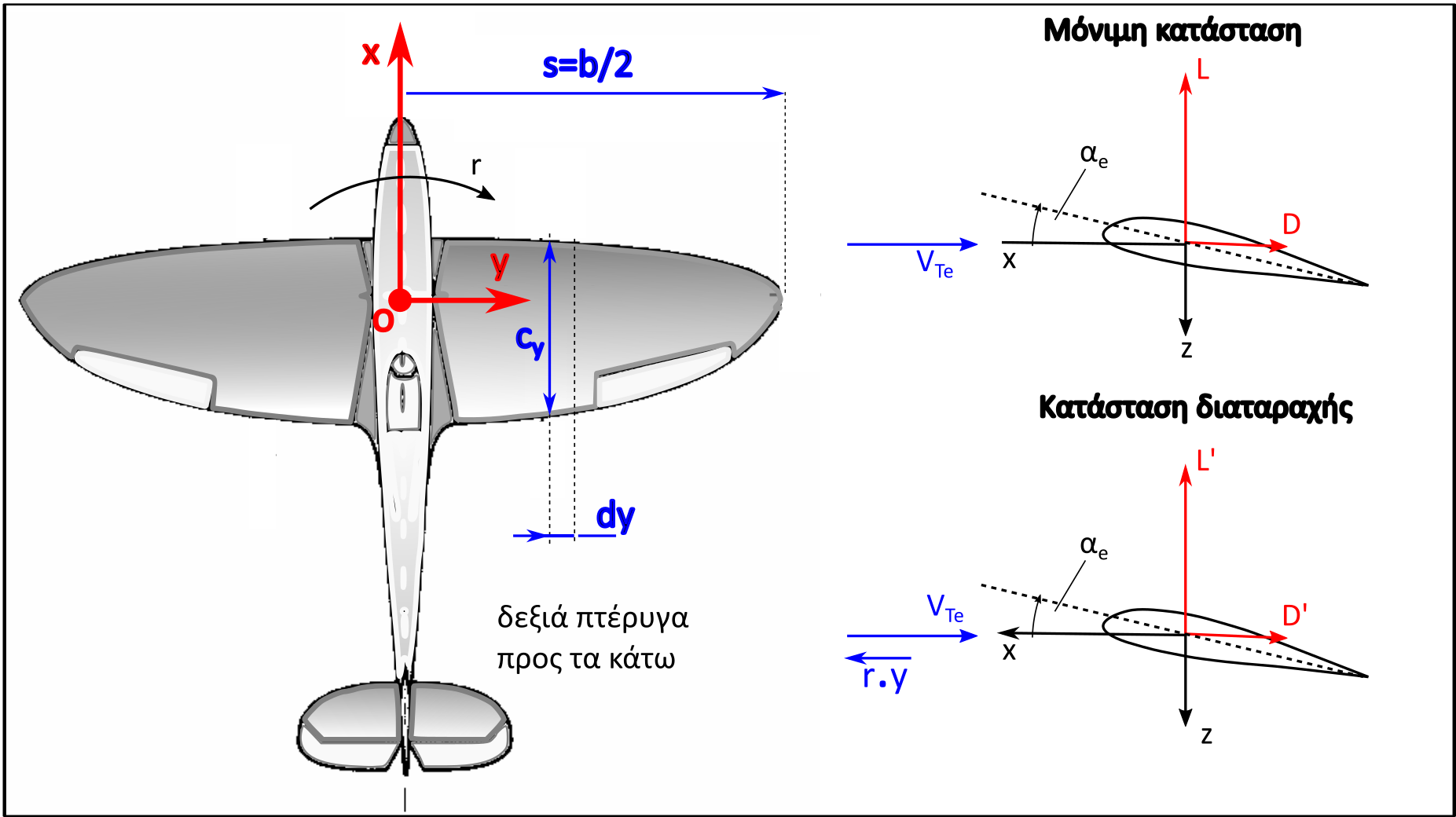
Σχήμα 6.14 Γεωμετρία και λωρίδες υπολογισμού άνωσης στη δεξιά και αριστερή κύρια πτέρυγα λόγω εκτροπής
Σύμφωνα με το σχήμα 6.14 η ταχύτητα στη στοιχειώδη λωρίδα κατά μήκος της χορδής στη δεξιά πτέρυγα κατά τη διάρκεια της διαταραχής του ρυθμού εκτροπής δίνεται από:
|
|
|
(6.121) |
και η ολική άνωση στη λωρίδα θα δίνεται από :
|
|
|
(6.122) |
όπου αμελούνται τα γινόμενα μικρών ποσοτήτων. Έτσι, η ροπή που προκύπτει στη δεξιά πτέρυγα θα δίνεται ως:
|
|
|
(6.123) |
Ανάλογα, στην αριστερή πτέρυγα ισχύει :
|
|
|
(6.124) |
Με ολοκλήρωση του αθροίσματος στο ημιεκπέτασμα υπολογίζεται η ροπή που προκύπτει από όλη την πτέρυγα δηλαδή :
|
|
|
(6.125) |
δηλαδή:
|
|
|
(6.126) |
και έτσι προκύπτει η έκφραση για τη επίδραση της πτέρυγας στη συγκεκριμένη παράγωγο ευστάθειας :
|
|
|
(6.127) |
Η επίδραση του κάθετου σταθερού στη ροπή περιστροφής λόγω του ρυθμού εκτροπής r προκύπτει από τη ροπή της πλάγιας δύναμης, που δημιουργείται από το κάθετο ουραίο πτερύγιο κατά την εκτροπή, ως προς τον άξονα Οx. Αυτή η πλάγια δύναμη, δημιουργείται από τον μηχανισμό που φαίνεται στο σχήμα 6.13 ενώ το σημείο εφαρμογής της βρίσκεται στο αεροδυναμικό κέντρο του κάθετου ουραίου, το οποίο συνήθως εμφανίζεται πάνω από τον άξονα περιστροφής και συνεπώς προκαλεί αρνητική ροπή περιστροφής. Η κατάσταση που επικρατεί αναλύεται στο σχήμα 6.15.
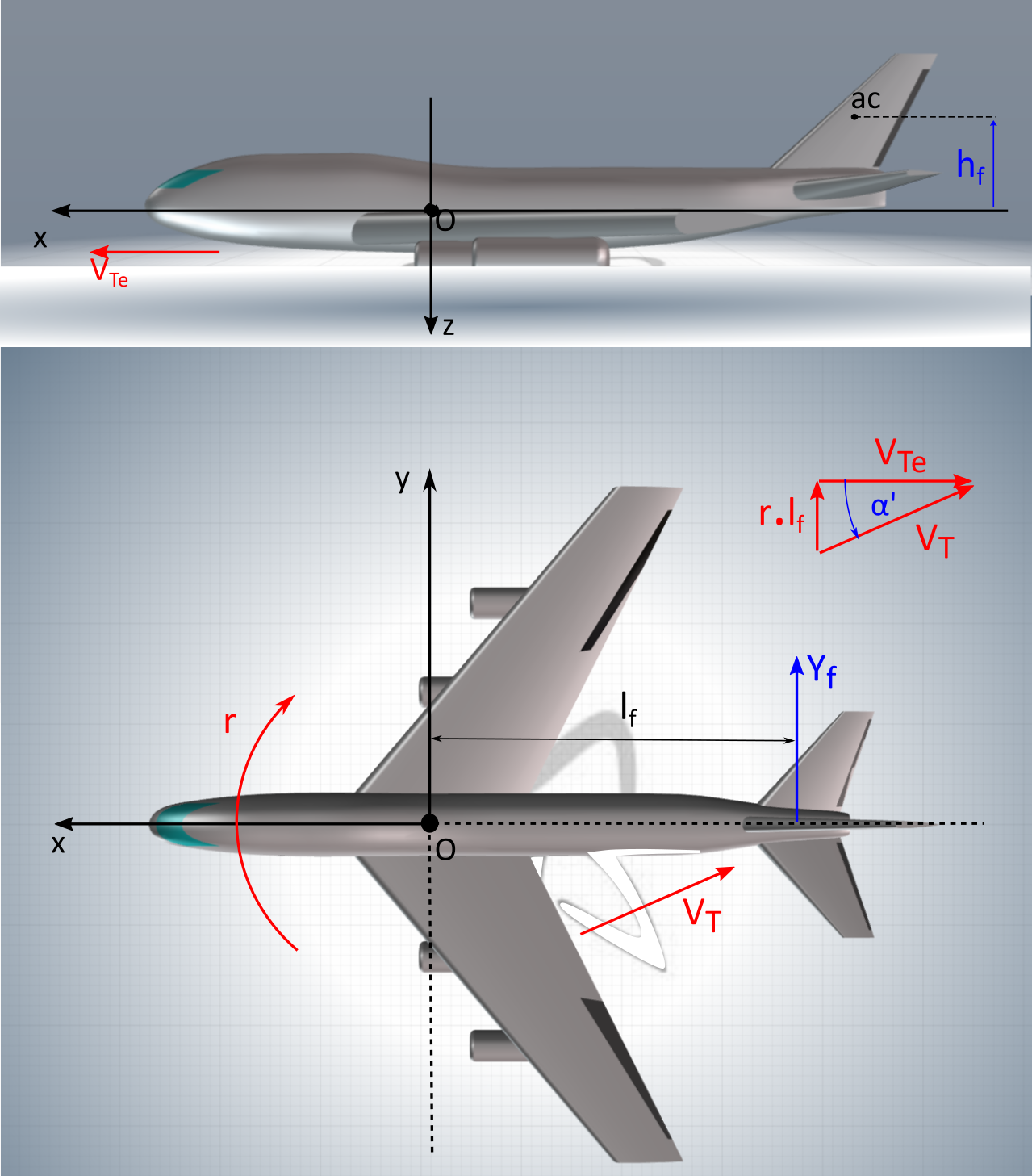
Σχήμα 6.15 Γεωμετρία διαμόρφωσης ροπής περιστροφής από τη δύναμη άνωσης στο κάθετο ουραίο πτερύγιο λόγω εκτροπής
Στο σχήμα 6.15, η ροπή περιστροφής προκαλείται από τη πλάγια δύναμη Υf λόγω του ρυθμού εκτροπής που δίνεται από την εξίσωση (6.118), η οποία εφαρμόζεται στο αεροδυναμικό κέντρο του κάθετου ουραίου πτερύγιου και σε κάθετη απόσταση hf πάνω από τον άξονα περιστροφής του αεροσκάφους. Έτσι, η ροπή θα δίνεται ως:
|
|
|
(6.128) |
Η ροπή περιστροφής λόγω της πλάγιας δύναμης στο κάθετο ουραίο πτερύγιο κατά τη διαταραχή της εκτροπής r θα δίνεται ως:
|
|
|
(6.129) |
Έτσι, η επίδραση του κάθετου ουραίου πτερύγιου στη διαστατή παράγωγο θα είναι :
|
|
|
(6.130) |
Τέλος, η ολική τιμή της παραγώγου της ροπής περιστροφής λόγω του ρυθμού εκτροπής θα δίνεται από το άθροισμα όλων των μεμονωμένων παραγόντων διαμόρφωσης της, περιλαμβάνοντας τους όρους των εξισώσεων (6.127),(6.130).
4.3.3.  :
Διαταραχή της ροπής εκτροπής λόγω διαταραχής του ρυθμού εκτροπής
:
Διαταραχή της ροπής εκτροπής λόγω διαταραχής του ρυθμού εκτροπής
Αυτή η παράγωγος, αποτελεί μία σημαντική παράμετρο στον καθορισμό της ευστάθειας διεύθυνσης του αεροσκάφους. Πιο συγκεκριμένα αποτελεί μέτρο της απόσβεσης της εκτροπής και επομένως είναι κυρίαρχος παράγοντας στον καθορισμό της ευστάθειας της μορφής της ολλανδικής περιστροφής. Αυτό έχει ήδη συζητηθεί στο υποκεφάλαιο 4.3 του Κεφ. 5.
Οι δύο πιο σημαντικοί παράγοντες που διαμορφώνουν την απόσβεση στην εκτροπή, είναι το κάθετο ουραίο πτερύγιο και η κύρια πτέρυγα. Γενικά όμως είναι αποδεκτό ότι ο κυρίαρχος παράγοντας είναι το κάθετο ουραίο πτερύγιο, αν και η επίδρασή του μπορεί να ελαττωθεί σημαντικά σε μεγάλες γωνίες πρόσπτωσης, εκεί όπου η πτέρυγα παίζει πλέον τον πρωταρχικό ρόλο.
Υπολογίζεται αρχικά η επίδραση της κύριας πτέρυγας, όπου σύμφωνα με το σχήμα 6.14, οι επιδράσεις της προκύπτουν από τη διαφορική οπισθέλκουσα κατά την κίνηση εκτροπής. Η ολική οπισθέλκουσα, στη στοιχειώδη λωρίδα κατά μήκος της χορδής της δεξιάς πτέρυγας, η οποία υφίσταται σταθερή εκτροπή με ρυθμό r, ελαττώνεται για τον ίδιο λόγο όπως η άνωση στη σχέση (6.122) και δίνεται από τη σχέση:
|
|
|
(6.131) |
Η ροπή εκτροπής γύρω από το κέντρο βάρους Ο, που προκαλείται από την οπισθέλκουσα στη λωρίδα, θα δίνεται από τη σχέση:
|
|
|
(6.132) |
και με όμοιο τρόπο για την αριστερή πτέρυγα προκύπτει :
|
|
|
(6.133) |
Έτσι, η ολική ροπή εκτροπής λόγω του ρυθμού εκτροπής που προκαλείται από την κύρια πτέρυγα, θα δίνεται με ολοκλήρωση του αθροίσματος κατά μήκος του μισού εκπετάσματος, δηλαδή του αθροίσματος των εξισώσεων (6.132) και (6.133):
|
|
|
(6.134) |
Η ροπή εκτροπής λόγω της διαφορικής οπισθέλκουσας πάνω στην πτέρυγα κατάντη της διαταραχής του ρυθμού εκτροπής θα δίνεται από :
|
|
|
(6.135) |
Για την παράγωγο Lr σε μια ορθογώνια πτέρυγα με μεγάλο
λόγο AR, μπορεί να υποτεθεί ότι ![]() (όπου
CD o συντελεστής οπισθέλκουσας για ολόκληρη την πτέρυγα) και cy
= c (όπου c η σταθερή γεωμετρική χορδή όλης της πτέρυγας). Για αυτή την ειδική
περίπτωση μπορεί να δειχτεί εύκολα ότι:
(όπου
CD o συντελεστής οπισθέλκουσας για ολόκληρη την πτέρυγα) και cy
= c (όπου c η σταθερή γεωμετρική χορδή όλης της πτέρυγας). Για αυτή την ειδική
περίπτωση μπορεί να δειχτεί εύκολα ότι:
|
|
|
(6.136) |
Αν και το αποτέλεσμα που δίνεται από την εξίσωση (6.136) είναι προσεγγιστικό και βασίζεται στις υποθέσεις που έγιναν, η σχέση είναι πολύ χρήσιμη για έλεγχο της τιμής που προκύπτει με την πλήρη ανάλυση.
Όπως αναφέρθηκε, η επίδραση του κάθετου ουραίου πτερύγιου στη ροπή εκτροπής λόγω του ρυθμού εκτροπής προκαλείται από τη ροπή που προκαλεί η πλάγια δύναμη στο κάθετο σταθερό λόγω του ρυθμού εκτροπής. Ο μηχανισμός δημιουργίας της ροπής φαίνεται στο σχήμα 6.13 ενώ σύμφωνα με αυτό το σχήμα και την εξίσωση(6.118) η ροπή θα δίνεται από τη σχέση:
|
|
|
(6.137) |
Έτσι, η ροπή θα δίνεται ως:
|
|
|
(6.138) |
Ανάλογα η έκφραση για την επίδραση του κάθετου ουραίου πτερυγίου στην παράγωγο της ροπής εκτροπής θα είναι :
|
|
|
(6.139) |
Τέλος η ολική τιμή της παραγώγου της ροπής εκτροπής λόγω του ρυθμού εκτροπής θα δίνεται από το άθροισμα όλων των μεμονωμένων παραγόντων διαμόρφωσης της, περιλαμβάνοντας τους όρους των εξισώσεων (6.125),(6.138).
5. Οι παράγωγοι ευστάθειας των μηχανισμών αεροδυναμικού ελέγχου
Με την προϋπόθεση ότι η εξεταζόμενη επιφάνεια ελέγχου είναι μια απλή διάταξη τύπου απλού πτερυγίου (flap-like) και ότι οι αεροδυναμικές του ιδιότητες μπορούν να μοντελοποιηθούν με σχετική ακρίβεια, μπορούν να προκύψουν οι παράγωγοι ευστάθειας της συγκεκριμένης επιφάνειας αεροδυναμικού ελέγχου.
Από την άλλη πλευρά, οι υπολογισμοί για τις παραγώγους ευστάθειας των πηδαλίων κλίσης και διεύθυνσης που προκύπτουν από απλά μοντέλα είναι απίθανο να δίνουν ικανοποιητική ακρίβεια, αφού είναι αρκετά δύσκολο να περιγραφούν με λεπτομέρεια οι τοπικές αεροδυναμικές συνθήκες που επικρατούν. Έτσι, χρησιμοποιούνται αριθμητικές προσομοιώσεις, βάσεις δεδομένων ή πειραματικές μετρήσεις, αν και στη βιβλιογραφία αναφέρονται αρκετές προσεγγιστικές μέθοδοι ανάλυσης. Για αυτόν τον λόγο, στο παρόν σύγγραμμα θα αναλυθεί μία σχετική μέθοδος υπολογισμού των παραγώγων του πηδαλίου ανόδου-καθόδου, η οποία μπορεί να χρησιμοποιηθεί στη συνέχεια και για τα πηδάλια κλίσης και διεύθυνσης.
5.1. Παράγωγοι λόγω του πηδαλίου ανόδου-καθόδου
Εκτενής ανάλυση για το πηδάλιο ανόδου καθόδου πραγματοποιείται στο υποκεφάλαιο 3 του κεφ.2. Ο συντελεστής άνωσης για το οριζόντιο ουραίο με πηδάλιο ανόδου-καθόδου, τυπικά δίνεται από τη σχέση :
|
|
|
(6.140) |
Ο αντίστοιχος συντελεστής οπισθέλκουσας μπορεί να εκφραστεί από τη σχέση:
|
|
|
(6.141) |
με όλες τις παραμέτρους στη σχέση αυτή να εξαρτώνται από το οριζόντιο ουραίο πτερύγιο.
5.1.1.  Διαταραχή
της αξονικής δύναμης Χ λόγω διαταραχής της κλίσης του πηδαλίου ανόδου-καθόδου
Διαταραχή
της αξονικής δύναμης Χ λόγω διαταραχής της κλίσης του πηδαλίου ανόδου-καθόδου
Για μια μικρή απόκλιση του πηδαλίου ανόδου-καθόδου (που είναι ανάλογη με τη θεωρία των μικρών διαταραχών) υποτίθεται ότι η διαταραχή στην αξονική δύναμη θα προκληθεί από τη μεταβολή στην οπισθέλκουσα του οριζόντιου ουραίου πτερυγίου και μόνον από αυτό. Έτσι:
|
|
|
(6.142) |
οπότε
|
|
|
(6.143) |
Με αντικατάσταση του ![]() από
την εξίσωση (6.141) στην εξίσωση (6.143), προκύπτει:
από
την εξίσωση (6.141) στην εξίσωση (6.143), προκύπτει:
|
|
|
(6.144) |
Για μικρές διαταραχές, στο όριο της μόνιμης αντισταθμισμένης πτήσης, από την εξίσωση (6.140) και την εξίσωση (6.144), προκύπτει ότι:
|
|
|
(6.145) |
όπου η αποδοτικότητα τ του πηδαλίου ανόδου καθόδου, ορίζεται από τη σχέση (2.40).
5.1.2.  :
Διαταραχή της κάθετης δύναμης Ζ λόγω διαταραχής της κλίσης του πηδαλίου
ανόδου-καθόδου
:
Διαταραχή της κάθετης δύναμης Ζ λόγω διαταραχής της κλίσης του πηδαλίου
ανόδου-καθόδου
Όπως και προηγουμένως, υποτίθεται ότι για μια μικρή απόκλιση του πηδαλίου ανόδου-καθόδου, η προκαλούμενη διαταραχή της κάθετης δύναμης προκαλείται από τη μεταβολή της άνωσης στο οριζόντιο ουραίο πτερύγιο. Έτσι:
|
|
|
(6.146) |
Οπότε
|
|
|
(6.147) |
Με αντικατάσταση του CLt από την εξίσωση (6.140) προκύπτει :
|
|
|
(6.148) |
5.1.3.  :
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω διαταραχής της κλίσης
του πηδαλίου ανόδου-καθόδου
:
Διαταραχή της ροπής πρόνευσης Μ περί τον άξονα Οy λόγω διαταραχής της κλίσης
του πηδαλίου ανόδου-καθόδου
Θεωρείται ότι η ροπή πρόνευσης, που προκαλείται από το πηδάλιο ανόδου-καθόδου πηγάζει από την άνωση του οριζόντιου ουραίου πτερύγιου και την προκαλούμενη ροπή γύρω από το κέντρο βάρους Ο.
Κατά συνέπεια ισχύει:
|
|
|
(6.149) |
και επομένως:
|
|
|
(6.150) |
Βιβλιογραφία/Αναφορές
|
Michael V. Cook, Flight Dynamics Principles - A Linear Systems Approach to Aircraft Stability and Control, 2nd ed. Oxford, UK: Elsevier Ltd, 2007. |
|
|
Robert C. Nelson, Flight Stability and Automatic Control, 2nd ed. Singapore: WCB/McGraw-Hill, 1998. |
|
|
John H. Blakelock, Automatic Control of Aircraft and Missiles, 2nd ed. New York, NY, USA: John Wiley & Sons, Inc., 1991. |
|
|
Robert K. Heffley & Wayne F. Jewell, "Aircraft Handling Qualities Data", NASA, Hawthorne CA, Contractor Report 1972. |
7: ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΠΤΗΣΗΣ ΚΑΙ ΕΥΚΟΛΙΑΣ ΧΕΙΡΙΣΜΟΥ
Σύνοψη
Σκοπός του κεφαλαίου είναι να κατατοπίσει τους τρόπους με τους οποίους γίνονται μετρήσιμες οι κατά βάση υποκειμενικές έννοιες των χαρακτηριστικών πτήσης και ευκολίας χειρισμού. Περιγράφονται οι διάφορες μέθοδοι, παράμετροι και κλίμακες που έχουν καθιερωθεί ανά τα έτη μέσω της εμπειρίας των μηχανικών ώστε να επικοινωνήσουν τις απόψεις των πιλότων με τα δυναμικά χαρακτηριστικά του αεροσκάφους.
Προαπαιτούμενη γνώση
Απαιτείται η κατανόηση της σημασίας των μορφών ευστάθειας και των χαρακτηριστικών τους (προσεγγίσεις, απόσβεση, φυσική συχνότητα και χρονικές σταθερές) όπως αναπτύχθηκαν στα κεφάλαια 4 και 5, της φυσικής των ελιγμών του αεροσκάφους και των βασικών εννοιών περί ευστάθειας που παρουσιάστηκαν στο 2ο κεφάλαιο.
1. Εισαγωγή
Ένα σημαντικό πεδίο της δυναμικής πτήσης, στενά συνυφασμένο με την ευστάθεια και τη δυναμική συμπεριφορά του αεροσκάφους, είναι η μελέτη των χαρακτηριστικών πτήσης και ευκολίας χειρισμού (flying and handling qualities).
Τα χαρακτηριστικά αυτά του αεροσκάφους, ορίζονται ως οι ιδιότητες που περιγράφουν την ευκολία και την ακρίβεια με την οποία το αεροσκάφος ανταποκρίνεται στις εντολές του πιλότου κατά την εκτέλεση κάποιου συγκεκριμένου ελιγμού. Δηλαδή, συνδέονται με τον φόρτο εργασίας που απαιτείται από τον πιλότο για την εκτέλεση του ελιγμού, με το πως αποκρίνεται το αεροσκάφος σε αυτούς τους χειρισμούς και το πως οι αποκρίσεις αυτές γίνονται αντιληπτές από τον πιλότο ή και τους επιβάτες στην περίπτωση πολιτικών αεροσκαφών.
Γενικά, οι ιδιότητες αυτές βασίζονται στις απόψεις των πιλότων, οι οποίες προκύπτουν μετά από πτητικές δοκιμές. Αυτό συνεπάγεται ένα βαθμό υποκειμενικότητας και μια ταξινόμηση κυρίως με ποιοτικά χαρακτηριστικά. Σκοπός αυτού του κεφαλαίου είναι η εύρεση μεθόδων, οι οποίες να συνδέουν την ποιότητα των χαρακτηριστικών πτήσης και ευκολίας χειρισμών, όπως αυτή προκύπτει από τις υποκειμενικές απόψεις των πιλότων, με αντικειμενικές παραμέτρους, οι οποίες χαρακτηρίζουν τη δυναμική συμπεριφορά του αεροσκάφους, όπως φυσικές συχνότητες και λόγοι απόσβεσης, παράγωγοι ευστάθειας κτλ.
Τα χαρακτηριστικά ευκολίας χειρισμού του αεροσκάφους, πηγάζουν τόσο από τη βραχυπρόθεσμη ή μεταβατική απόκριση όσο και από τη μακροπρόθεσμη (long term) απόκριση. Η βραχυπρόθεσμη ευκολία χειρισμού ασχολείται με την επίδραση της μικρής περιόδου και τον κρίσιμο τρόπο που αυτή επηρεάζει την ικανότητα ελιγμών (manoeuvrability) του αεροσκάφους. Η ικανότητα του πιλότου να αντιμετωπίζει αποτελεσματικά τη βραχυπρόθεσμη δυναμική του αεροσκάφους εξαρτάται από την ταχύτητα και την ευστάθεια της απόκρισης. Απαιτείται λοιπόν συμβατότητα του εύρους δυνατοτήτων του πιλότου και του εύρος ζώνης (bandwidth) του αεροσκάφους. Επίσης, τα περιθώρια ευστάθειας των μορφών της δυναμικής ευστάθειας πρέπει να είναι επαρκή.
Τα μακροπρόθεσμα χαρακτηριστικά ευκολίας χειρισμού, αφορούν την επίτευξη και τη διατήρηση αντισταθμισμένης ισορροπίας και καθορίζονται κυρίως από τη στατική ευστάθεια και το φυγοειδές. Αυτά τα φαινόμενα εξελίσσονται αργά και οι συχνότητες τους είναι χαμηλές, εντός του εύρους ζώνης και της ικανότητας του μέσου πιλότου, ακόμη και όταν οι σχετικές μορφές είναι οριακά ασταθείς. Δηλαδή οι απαιτήσεις για την ευστάθεια της δυναμικής χαμηλών συχνοτήτων είναι λιγότερο αυστηρές.
Κατά συνέπεια, πρώτιστης σημασίας είναι οι προδιαγραφές ικανοποιητικών βραχυπρόθεσμων χαρακτηριστικών ευκολίας χειρισμού, το οποίο αποτελεί και το κύριο αντικείμενο μελέτης του παρόντος πεδίου. Έτσι, απαιτείται ο αυστηρός καθορισμός του στατικού περιθωρίου ευστάθειας και του αντίστοιχου περιθωρίου ελιγμών.
2. Ελιγμοί και ευστάθεια
Οι δράσεις ελέγχου που εφαρμόζει ο πιλότος προκαλούν μεταβολές στο ίχνος πτήσης του αεροσκάφους. Στη περίπτωση της εκτέλεσης ενός ελιγμού περί ενός συγκεκριμένου ίχνους πτήσης, αυτές οι μεταβολές είναι προσωρινές, καθώς το αεροσκάφος επιστρέφει στην αρχική του κατάσταση. Από την άλλη πλευρά, για να επιτευχθεί μια νέα κατάσταση αντιστάθμισης, ο χειρισμός αντιστοιχεί σε μόνιμη μεταβολή της διεύθυνσης του ίχνους πτήσης συγκριτικά με την αρχική κατάσταση.
Γενικά οι παρεμβάσεις του πιλότου έχουν ως αντίκτυπο την απόκριση του αεροσκάφους, όπως αυτή εκφράζεται ως περιστροφή περί τους άξονες πρόνευσης, περιστροφής ή διεύθυνσης, ώστε το διάνυσμα της άνωσης να στραφεί προς την επιθυμητή διεύθυνση. Με επιπλέον χειρισμό του πηδαλίου ανόδου-καθόδου, ο πιλότος ρυθμίζει τη γωνία πρόσπτωσης ώστε να δημιουργηθεί η απαιτούμενη άνωση που θα προκαλέσει την επιθυμητή επιτάχυνση για να ελιχθεί το αεροσκάφος.
Ο απλούστερος αλλά και ένας από τους βασικότερους ελιγμούς είναι η συμμετρική, ανοδική ή καθοδική κίνηση του αεροσκάφους. Κατά τον ελιγμό αυτό, όπως φαίνεται και στο σχ. 7.1, ένα αεροσκάφος, το οποίο πετά αρχικά οριζόντια και συμμετρικά με σταθερή ταχύτητα Ue , υπόκειται σε μία μικρή εκτροπή δe του πηδαλίου ανόδου-καθόδου, γεγονός το οποίο προκαλεί μια περιστροφή του ρύγχους προς τα πάνω με σταθερό ρυθμό πρόνευσης q.
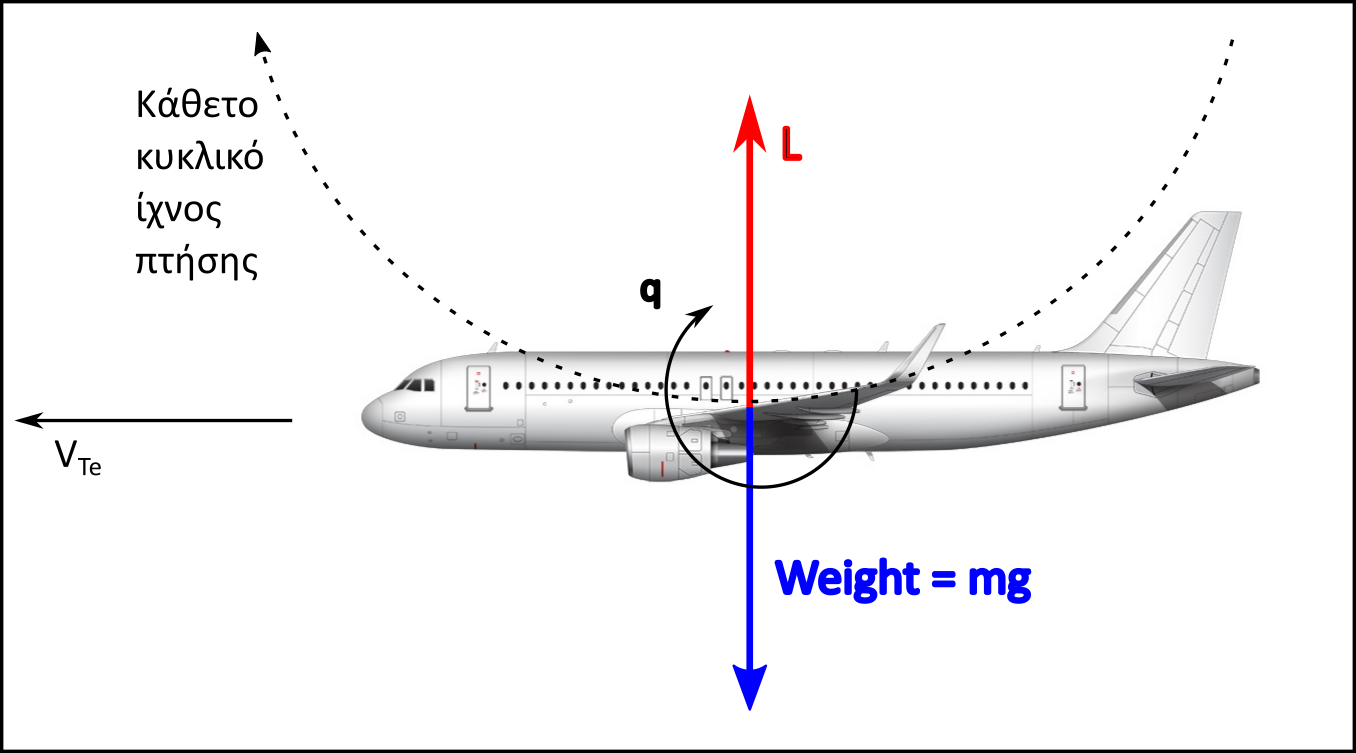
Σχήμα 7.1 Ανοδικός ελιγμός αεροσκάφους
Για να μπορεί το αεροσκάφος να εκτελεί ανοδική κίνηση, πρέπει η δύναμη άνωσης Lw = (1/2)ρSUe2CLw να εξισορροπεί όχι μόνο το βάρος, αλλά και τις κατακόρυφες αδρανειακές δυνάμεις:
|
|
|
(7.1) |
όπου az η κατακόρυφη επιτάχυνση. Όμως, με βάση την εξίσωση (3.34), από την έκφραση της κάθετης δύναμης Ζ, προκύπτει:
|
|
|
(7.2) |
Υποθέτοντας ότι ο ελιγμός είναι σταθερός, τότε ![]() ,
και επομένως το αεροσκάφος πρέπει να διατηρεί ένα σταθερό ρυθμό πρόνευσης q, ο οποίος προκύπτει αντικαθιστώντας την (7.2)
στην (7.1):
,
και επομένως το αεροσκάφος πρέπει να διατηρεί ένα σταθερό ρυθμό πρόνευσης q, ο οποίος προκύπτει αντικαθιστώντας την (7.2)
στην (7.1):
|
|
|
(7.3) |
Όπως φαίνεται και στο σχ. 6.3, ο σταθερός ρυθμός πρόνευσης q προκαλεί μια σταθερή μεταβολή ![]() στη
γωνία πρόσπτωσης του ουραίου οριζόντιου σταθερού, ίσης με:
στη
γωνία πρόσπτωσης του ουραίου οριζόντιου σταθερού, ίσης με:
|
|
|
(7.4) |
Αντικαθιστώντας την (7.3) στην (7.4), η μεταβολή ![]() της
γωνίας πρόσπτωσης προκύπτει:
της
γωνίας πρόσπτωσης προκύπτει:
|
|
|
(7.5) |
όπου
|
|
|
(7.6) |
Η μεταβολή ![]() της
γωνίας πρόσπτωσης, προκαλεί μια μεταβολή στη δύναμη άνωσης του ουραίου
οριζόντιου σταθερού, ίσης με:
της
γωνίας πρόσπτωσης, προκαλεί μια μεταβολή στη δύναμη άνωσης του ουραίου
οριζόντιου σταθερού, ίσης με:
|
|
|
(7.7) |
Αυτή η μεταβολή της δύναμης άνωσης προκαλεί μια μεταβολή στη ροπή που ασκεί το ουραίο οριζόντιο σταθερό, ίση με:
|
|
|
(7.8) |
Και η οποία πρέπει να υπερτεθεί στη ροπή ![]() ,
όπως αυτή προκύπτει από τη σχέση (2.13).
,
όπως αυτή προκύπτει από τη σχέση (2.13).
Ακολουθώντας τα αντίστοιχα βήματα ανάλυσης, όπως στο υποκεφάλαιο 2.4, του κεφ. 2, η επίδραση του ελιγμού οδηγεί στη μεταβολή της θέσης του ουδέτερου σημείου ως εξής:
|
|
|
(7.9) |
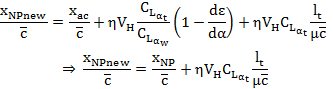
Η σύγκριση της σχέσης (7.9) με την (2.33) οδηγεί στο συμπέρασμα ότι ο ελιγμός οδηγεί στην αύξηση του περιθωρίου Ηm στατικής ευστάθειας:
|
|
|
(7.10) |
Το περιθώριο Ηm στατικής ευστάθειας σε ελιγμούς, είναι στενά συνδεδεμένο με τη φυσική συχνότητα μικρής περιόδου. Πράγματι, με αντικατάσταση των εκφράσεων των παραγώγων ευστάθειας στη σχέση (4.21) για τη φυσική συχνότητα μικρής περιόδου, οδηγεί στην έκφραση:
|
|
|
(7.11) |

Υποθέτοντας ότι το η από τη σχέση (2.11), είναι της τάξης της μονάδας (δηλαδή η ταχύτητα του αέρα είναι περίπου ίδια στην κύρια πτέρυγα και το ουραίο οριζόντιο σταθερό πτερύγιο) και χρησιμοποιώντας τις σχέσεις (7.6) και (7.9), η προσεγγιστική εκτίμηση της φυσικής συχνότητας μικρής περιόδου γίνεται:
3. Φυσικές παράμετροι αποτύπωσης χαρακτηριστικών ευκολίας χειρισμών
3.1. Παράμετροι απόκρισης βραχυπρόθεσμης δυναμικής μικρής περιόδου
Ένα πολύ σημαντικό κομμάτι στον καθορισμό των απαιτήσεων για τα χαρακτηριστικά ευκολίας χειρισμού σχετίζεται με τον τρόπο που ο πιλότος αντιλαμβάνεται την επίδραση στην απόκριση του αεροσκάφους των εντολών ελέγχου που δίνει.
Όπως αναφέρθηκε στην εισαγωγή, η βραχυπρόθεσμη δυναμική απόκριση του αεροσκάφους υπό την επίδραση της μικρής περιόδου και οι φυσικές παράμετροι που τη χαρακτηρίζουν, επηρεάζει με κρίσιμο τρόπο την ικανότητα ελιγμών, και παρέχει κρίσιμες πληροφορίες για τα χαρακτηριστικά ευκολίας χειρισμού, ενώ βέβαια μοντελοποιείται σχετικά εύκολα μέσω των ελαττωμένων εξισώσεων κίνησης.
Η μεταβολή του ίχνους πτήσης, γίνεται αντιληπτή ως κάποια μεταβολή στην κάθετη επιτάχυνση στην οποία είναι εξαιρετικά ευαίσθητος ο ανθρώπινος οργανισμός. Σε μικρότερο βαθμό, δύναται επίσης να αντιληφθεί μεταβολές στη θέση του αεροσκάφους και τις γωνιακές επιταχύνσεις. Η μελέτη της κάθετης επιτάχυνσης προσφέρει λοιπόν, με τον πιο σαφή τρόπο, μια ζωτική ένδειξη για τα χαρακτηριστικά ευκολίας χειρισμού.
Το μοντέλο μειωμένης τάξης που περιγράφει τη βραχυπρόθεσμη διαμήκη δυναμική αντιστοιχεί στην προσέγγιση της μικρής περιόδου και διατυπώθηκε στην εξίσωση (4.13):
|
|
|
|
Υπό την προϋπόθεση βέβαια ότι το αεροσκάφος πετά σε μόνιμη οριζόντια πτήση και η αναφορά γίνεται στους άξονες ανέμου. Εφόσον ισχύει zq ≈ Ue και αντικαθιστώντας την κάθετη ταχύτητα w με τη γωνία πρόσπτωσης α από τη σχέση α=w/VTe, προκύπτει:
|
|
|
(7.13) |
Οι συναρτήσεις μεταφοράς που προκύπτουν από την επίλυση του συστήματος (7.13) είναι:
|
|
|
(7.14) |
|
|
|
(7.15) |

Η συνάρτηση μεταφοράς που περιγράφει τη βραχυπρόθεσμη απόκριση
της θέσης πρόνευσης σε σχέση με τη μεταβολή του πηδαλίου ανόδου-καθόδου,
προκύπτει ως ![]() :
:
|
|
|
(7.16) |
Η απόκριση της κάθετης επιτάχυνσης az ως προς το πηδάλιο ανόδου-καθόδου προκύπτει από την αντικατάσταση των εξισώσεων (7.14), (7.15),(3.29) στην εξίσωση (7.2):
|
|
|
(7.17) |
Για να προκύψει η πιο πάνω εξίσωση υποτέθηκε ότι ο λόγος zδe/Ue είναι τόσο μικρός ώστε να μπορεί να αμεληθεί.
H συνάρτηση μεταφοράς που περιγράφει τη βραχυπρόθεσμη απόκριση της γωνίας του ίχνους πτήσης ως προς το πηδάλιο ανόδου-καθόδου προκύπτει άμεσα από την αντικατάσταση στη σχέση (3.32) των εξισώσεων (7.16) και (7.14):
|
|
|
(7.18) |
Και εδώ υποτίθεται ότι ο λόγος ![]() είναι
τόσο μικρός, ώστε να μπορεί να αμεληθεί. Με τη διαίρεση της σχέσης (7.18) με
την (7.16) μπορεί να δειχθεί ότι:
είναι
τόσο μικρός, ώστε να μπορεί να αμεληθεί. Με τη διαίρεση της σχέσης (7.18) με
την (7.16) μπορεί να δειχθεί ότι:
|
|
|
(7.19) |
Η (7.19) παρέχει τη σημαντική πληροφορία ότι κατά τη βραχυπρόθεσμη κίνηση, η απόκριση της γωνίας του ίχνους πτήσης καθυστερεί σε σχέση με τη γωνία πρόνευσης κατά τη χρονική σταθερά Τθ2 κάτι που μερικές φορές αναφέρεται και ως καθυστέρηση της γωνίας πρόσπτωσης (incident lag).
Για την Τθ2 κατά προσέγγιση ισχύει :
|
|
|
(7.20) |

Οι συναρτήσεις μεταφοράς που δίνονται από τις παραπάνω εξισώσεις (7.14) έως (7.19) περιγράφουν την κλασσική διαμήκη βραχυπρόθεσμη απόκριση ως προς το πηδάλιο ανόδου-καθόδου και αντιπροσωπεύουν τη βάση επί της οποίας στηρίζονται οι περισσότερες σύγχρονες αντιλήψεις για τα χαρακτηριστικά ευκολίας χειρισμού. Για το κλασσικό αεροσκάφος, τα χαρακτηριστικά απόκρισης καθορίζονται από τις αεροδυναμικές ιδιότητες του σκάφους που συνήθως είναι γραμμικές, αυστηρά προσδιορισμένες και προκαθορισμένες.
Είναι επίσης ξεκάθαρο, ότι η βραχυπρόθεσμη δυναμική αντιστοιχεί με εκείνη ενός γραμμικού συστήματος δεύτερης τάξης ενώ εκείνα τα αεροσκάφη τα οποία επιδεικνύουν ανάλογη δυναμική συμπεριφορά λέγεται ότι έχουν χαρακτηριστικά απόκρισης που ομοιάζουν με χαρακτηριστικά συστήματος δεύτερης τάξης (second order-like).
Βέβαια τα χαρακτηριστικά απόκρισης όλων των πραγματικών αεροσκαφών αποκλίνουν κατά ένα βαθμό από αυτά τα απλοποιημένα και μάλλον ιδεατά μοντέλα. Η πραγματική απόκριση, χρωματίζεται (coloured) από τη μακροπρόθεσμη δυναμική, τα μη γραμμικά χαρακτηριστικά του σκάφους και φυσικά από τις επιδράσεις του συστήματος επαύξησης της ευστάθειας, όταν βέβαια είναι εγκατεστημένο ένα τέτοιο σύστημα. Από την άλλη πλευρά, όσο περίπλοκο και να είναι το αεροσκάφος και οι συνθήκες λειτουργίας του, παραμένει ο αντικειμενικός σκοπός της επίτευξης χαρακτηριστικών δυναμικής απόκρισης που ομοιάζουν με σύστημα δεύτερης τάξης.
3.2. Ανηγμένος συντελεστής φόρτισης
Με σκοπό την ανάλυση των διαμήκων βραχυπρόθεσμων χαρακτηριστικών χειρισμού του αεροσκάφους, η ικανότητα απόκρισης (responsiveness) ή διαφορετικά η ικανότητα ελιγμών του αεροσκάφους ποσοτικοποιούνται από ένα παράγωγο μέγεθος, το οποίο ορίζεται ως ο ανηγμένος συντελεστής φόρτισης ανά μονάδα γωνίας πρόσπτωσης (normal load factor) και συμβολίζεται με nα.
Αυτή η παράμετρος συνδέεται με την αεροδυναμική άνωση που παράγεται ανά μονάδα γωνίας πρόσπτωσης σε δεδομένες συνθήκες πτήσης και επομένως είναι ανάλογη με την κλίση της καμπύλης της άνωσης και το τετράγωνο της ταχύτητας.
Μία έκφραση για τον nα προκύπτει από τις βραχυπρόθεσμες συναρτήσεις μεταφοράς, οι οποίες υπολογίσθηκαν στο υποκεφάλαιο 3.1 του παρόντος κεφαλαίου. Με την υπόθεση ότι η είσοδος στο πηδάλιο ανόδου-καθόδου είναι η μοναδιαία συνάρτηση βαθμίδας δe(s) = 1/s, ο μετασχηματισμός Laplace της απόκρισης της γωνίας πρόσπτωσης προκύπτει από την εξίσωση (7.14) ως:
|
|
|
(7.21) |

Με την εφαρμογή του θεωρήματος τελικής τιμής στην εξίσωση (7.21) προκύπτει η μόνιμη τιμή της γωνίας πρόσπτωσης για s = 0:
|
|
|
(7.22) |
Με όμοιο τρόπο μπορεί να προκύψει από τη σχέση (7.17) η αντίστοιχη μόνιμη τιμή της κάθετης επιτάχυνσης :
|
|
|
(7.23) |
Ο κάθετος ανηγμένος συντελεστής φόρτισης ανά μονάδα γωνίας πρόσπτωσης θα δίνεται:
|
|
|
Έτσι, με αντικατάσταση των εξισώσεων (7.22), (7.23),(7.20) στην εξίσωση (7.24) προκύπτει η πολύ σημαντική σχέση :
|
|
|
(7.25) |
3.3. Παράμετρος αναμενόμενου ελέγχου (Control Anticipation Parameter - CAP)
Όπως σημειώνει ο Cook [3], έχει αναφερθεί από τον Birhle (1966) ότι: «Με στόχο τις ακριβείς ρυθμίσεις στο ίχνος πτήσης, ο πιλότος πρέπει να μπορεί να προβλέπει την τελική απόκριση του αεροσκάφους και για αυτό το σκοπό χρησιμοποιείται η γωνιακή επιτάχυνση πρόνευσης».
Αεροσκάφη τα οποία διαθέτουν καλές διαμήκεις βραχυπρόθεσμες ιδιότητες απόκρισης που ομοιάζουν με σύστημα δεύτερη τάξης, γενικά προσφέρουν στον πιλότο καλές ενδείξεις για την πρόβλεψη των χαρακτηριστικών ευκολίας χειρισμού. Αυτό ειδικότερα εξαρτάται από την απόσβεση και τη συχνότητα της ταλάντωσης μικρής περιόδου. Ο Birhle αναφέρει επίσης, τις παρατηρήσεις των πιλότων ότι: «Για εκείνα τα αεροσκάφη που διαθέτουν υψηλή αδράνεια ή χαμηλή στατική ευστάθεια, η γωνιακή επιτάχυνση πρόνευσης, που συνοδεύει τις μικρές ρυθμίσεις στο ίχνος πτήσης, μπορεί να βρίσκεται κάτω από το κατώφλι αντίληψης του ανθρώπου».
Με άλλα λόγια, η χρήση των ενδείξεων πρόβλεψης της κίνησης από τον πιλότο ουσιαστικά είναι αδύνατη, γεγονός που με τη σειρά του οδηγεί σε φτωχά χαρακτηριστικά ευκολίας χειρισμού. Για να αντιμετωπιστούν τέτοιες καταστάσεις, ο Birhle όρισε μια ποσότητα μέτρησης της ικανότητας «πρόβλεψης» της απόκρισης που ονόμασε Παράμετρο Αναμενόμενου Ελέγχου (CAP).
Ο ακριβής ορισμός της CAP, είναι ως η ποσότητα της στιγμιαίας γωνιακής επιτάχυνσης πρόνευσης, ανά μονάδα κάθετης επιτάχυνσης της μόνιμης κατάστασης. Η μόνιμη απόκριση της κάθετης επιτάχυνσης, για μια είσοδο στο χειριστήριο ως προς την πρόνευση καθορίζεται από τις αεροδυναμικές ιδιότητες του αεροσκάφους, την πτέρυγα και το οριζόντιο ουραίο πτερύγιο. Όμως, το μέγεθος του μεταβατικού μέγιστου (transient peak) της γωνιακής επιτάχυνσης πρόνευσης που εμφανίζεται αμέσως μετά από το χειρισμό, καθορίζεται κατά μεγάλο βαθμό από τη δυναμική της μικρής περιόδου, η οποία με τη σειρά της εξαρτάται από τη διαμήκη στατική ευστάθεια και τη ροπή αδράνειας πρόνευσης. Έτσι, η CAP περιγράφει με αποδοτικό ποσοτικά τρόπο εκείνα τα χαρακτηριστικά της μικρής περιόδου που αντιστοιχούν στις αεροδυναμικές ιδιότητες και στις συνθήκες λειτουργίας του αεροσκάφους. Μία απλή έκφραση για την CAP, προκύπτει εύκολα από τη διαμήκη βραχυπρόθεσμη συνάρτηση μεταφοράς. Η συνάρτηση μεταφοράς της γωνιακής επιτάχυνσης πρόνευσης προκύπτει από την εξίσωση (7.15) ως:
|
|
|
(7.26) |
Η αρχική επιτάχυνση ως προς την πρόνευση, μπορεί να προκύψει υποθέτοντας μία μοναδιαία είσοδο βαθμίδας ως προς το πηδάλιο ανόδου-καθόδου και εφαρμόζοντας το θεώρημα αρχικής τιμής στην εξίσωση (7.26):
|
|
|
(7.27) |
Με όμοιο τρόπο η κάθετη επιτάχυνση της μόνιμης κατάστασης μπορεί να προκύψει υποθέτοντας μία μοναδιαία είσοδο βαθμίδας στο πηδάλιο ανόδου-καθόδου και εφαρμόζοντας το θεώρημα τελικής τιμής στην εξίσωση (7.17):
|
|
|
(7.28) |
Η αδιάστατη κάθετη επιτάχυνση ή παράγοντας φόρτισης (load factor) θα δίνεται από:
|
|
|
(7.29) |
και λόγω της (7.20) η CAP θα δίνεται από την:
|
|
|
(7.30) |
Επειδή κατά προσέγγιση ισχύει Τθ2 = -1/zw, χρησιμοποιώντας την (7.25) προκύπτει μία εναλλακτική και εύχρηστη έκφραση για την CAP:
|
|
|
(7.31) |
Αντικαθιστώντας στην (7.31) τις σχέσεις (7.12) και (7.25) προκύπτει ότι :
|
|
|
(7.32) |
όπου το k περιγράφει τη διαμήκη ακτίνα της περιστροφής (longitudinal radius of rotation). Επομένως αποδείχθηκε ότι η CAP είναι άμεσα ανάλογη του στατικού περιθωρίου ευστάθειας ελιγμών Hm με τα χειριστήρια σταθεροποιημένα και ότι η σταθερά της αναλογίας εξαρτάται από τη γεωμετρία του αεροσκάφους και την κατανομή της μάζας του.
4. Κανονισμοί και προδιαγραφές χαρακτηριστικών πτήσης
Οι περισσότερες χώρες που ασχολούνται ενεργά με την αεροπορία, διαθέτουν Εθνικές Υπηρεσίες οι οποίες επιβλέπουν τις αεροναυτικές δραστηριότητες που πραγματοποιούνται στο έδαφος τους.
Όπως καταγράφεται στο [13], στην Ελλάδα π.χ. αλλά και αλλού (Ηνωμένο Βασίλειο κ.ά.), η Υπηρεσία Πολιτικής Αεροπορίας (Civil Aviation Authority-CAA) ρυθμίζει τους κανονισμούς που αφορούν θέματα πολιτικής αεροπορίας και το Υπουργείο Άμυνας (Ministry of Defence-MoD) επιβλέπει όλες τις στρατιωτικές αεροναυτικές δραστηριότητες. Επιπλέον ένα σύνολο από Ευρωπαϊκές χώρες (στις οποίες ανήκει και η Ελλάδα) έχουν συμφωνήσει να συνεργαστούν για την εξέλιξη κοινών απαιτήσεων για την αεροπορία (Joint Aviation Requirements-JAR), οι οποίες θα έχουν προτεραιότητα σε σχέση με τις αντίστοιχες εθνικές απαιτήσεις. Φυσικά κάθε φορά η επιβλέπουσα αρχή, για όλες τις ενέργειες που αφορούν τους JAR, θα είναι η αντίστοιχη Υπηρεσία Πολιτικής Αεροπορίας της κάθε χώρας. Έτσι, για παράδειγμα στην Ελλάδα οι κανονισμοί JAR εκδίδονται από την Υπηρεσία Πολιτικής Αεροπορίας (ΥΠΑ). Στις Ηνωμένες Πολιτείες οι αντίστοιχες υπηρεσίες είναι η Federal Aviation Administration (FAA) και το Υπουργείο Άμυνας αντίστοιχα (Department of Defence-DoD).
Όλες αυτές οι Υπηρεσίες εκδίδουν ένα μεγάλο αριθμό από έγγραφα που καθορίζουν τα ελάχιστα αποδεκτά όρια για την κατασκευή, τις επιδόσεις και την ασφάλεια όλων των ιπτάμενων κατασκευών που επιχειρούν στο έδαφος τους. Κατά τα τελευταία χρόνια το βάρος έχει δοθεί στην υιοθέτηση κοινών κανονισμών και από τις δύο πλευρές του Ατλαντικού για προφανείς λόγους. Οι περισσότερες χώρες, καθώς δεν διαθέτουν ανάλογη εμπειρία υιοθετούν τους κανονισμούς των ΗΠΑ ή της κοινής Ευρωπαϊκής Υπηρεσίας.
Όλες λοιπόν οι πιο πάνω υπηρεσίες εκδίδουν έγγραφα που καθορίζουν με ικανοποιητική λεπτομέρεια μεταξύ άλλων και τα ελάχιστα αποδεκτά πρότυπα των χαρακτηριστικών πτήσης τα οποία είναι περισσότερο γνωστά ως απαιτήσεις χαρακτηριστικών πτήσης (flying qualities requirements). Κάποια παραδείγματα των σχετικών εγγράφων μπορούν να βρεθούν εύκολα στο διαδίκτυο. Πολύ γενικά οι απαιτήσεις χαρακτηριστικών πτήσης που εκδίδονται τόσο από την CAA όσο και από την FAA έχουν ως κύριο αντικείμενο την ασφάλεια των πτήσεων ενώ οι απαιτήσεις που αφορούν στην ευστάθεια, τον έλεγχο και την ευκολία χειρισμού συνήθως έρχονται σε δεύτερη μοίρα όντας πιο «χαλαροί».
Από την άλλη πλευρά, οι απαιτήσεις χαρακτηριστικών πτήσης που εκδίδονται από τις αντίστοιχες στρατιωτικές υπηρεσίες των δύο κρατών είναι από κάθε άποψη πολύ πιο συγκεκριμένες, απαιτητικές και πολύπλοκες. Είναι ευθύνη του κάθε κατασκευαστή ή προμηθευτή να αποδείξει ότι το αεροσκάφος του συμμορφώνεται (complies) με τις ανάλογες προδιαγραφές πριν αυτό να μπορεί να γίνει αποδεκτό από τον χρήστη.
Έτσι λοιπόν, η επίδειξη συμμόρφωσης (demonstration of compliance) με τις προδιαγραφές είναι το κύριο αντικείμενο ενδιαφέροντος των Υπηρεσιών που αναφέραμε. Πιο συγκεκριμένα, οι στρατιωτικές απαιτήσεις για τα χαρακτηριστικά πτήσης είναι σχετικά πολύπλοκες, με αποτέλεσμα η σωστή εφαρμογή τους να μην είναι, όπως θα περίμενε κανείς, προφανής. Για να επιλυθεί αυτό το πρόβλημα, τα συγκεκριμένα έγγραφα περιλαμβάνουν επίσης πληροφορίες για τους αποδεκτούς τρόπους συμμόρφωσης (acceptable means of compliance), ώστε να βοηθηθεί ο κατασκευαστής κατά την εφαρμογή των κανονισμών στο δικό του αεροσκάφος.
Το εκτεταμένο πρόγραμμα πτητικών δοκιμών από το οποίο περνούν τα περισσότερα αεροσκάφη πριν ενταχθούν σε υπηρεσία αφορά κατά ένα μεγάλο μέρος την επίδειξη συμμόρφωσης με τους κανονισμούς των χαρακτηριστικών πτήσης. Όμως είναι μάλλον απίθανο ένα αεροσκάφος να ικανοποιεί πλήρως τις απαιτήσεις αυτές, εκτός και εάν έχει σχεδιαστεί εξαρχής με τρόπο ώστε να τις ικανοποιεί. Επομένως τα έγγραφα που αναφέρθηκαν έχουν ζωτική σημασία για τον σχεδιαστή του αεροσκάφους. Σε αυτό το πλαίσιο μπορεί να ειπωθεί ότι οι προδιαγραφές καθορίζουν τους κανόνες σύμφωνα με τους οποίους πρέπει να σχεδιαστεί και να αξιολογηθεί η ευστάθεια, ο έλεγχος και η ευκολία χειρισμού του αεροσκάφους.
Ο τυπικός (formal) ορισμός προδιαγραφών των χαρακτηριστικών πτήσης και ευκολίας χειρισμού του αεροσκάφους [3], έχει ως σκοπό να: «βεβαιώσει τα πτητικά χαρακτηριστικά που θα παρέχουν ικανοποιητικές επιδόσεις για την εκπλήρωση της αποστολής, ταυτόχρονα με ικανοποιητικό επίπεδο ασφάλειας».
Οι περισσότερες από τις απαιτήσεις των προδιαγραφών που αναφέραμε, περιγράφονται ποσοτικά από τις μεταβλητές ευστάθειας και ελέγχου. Ο αντικειμενικός σκοπός λοιπόν όσων θα ακολουθήσουν είναι να δοθεί μια περίληψη των απαιτήσεων χαρακτηριστικών πτήσης όπως αυτές τίθενται στα έγγραφα των σχετικών προδιαγραφών.
5. Ο ρόλος του αεροσκάφους
Είναι πρωταρχικής σημασίας τα χαρακτηριστικά ενός δυναμικού συστήματος που υπόκειται στον άμεσο έλεγχο του ανθρώπου να είναι οριοθετημένα. Εκτός αυτών των ορίων το σύστημα δεν θα πρέπει να επιτρέπει τον έλεγχο από τον άνθρωπο. Οι μεταβολές στα αποδεκτά δυναμικά χαρακτηριστικά, μέσα στα όρια επιδόσεων του αεροσκάφους μπορούν να είναι αρκετά μεγάλες, δεδομένου ότι ο άνθρωπος είναι πολύ ευπροσάρμοστος. Είναι επίσης πολύ σημαντικό, τα χαρακτηριστικά πτήσης να είναι κατάλληλα σε σχέση με τον τύπο και την αποστολή του αεροσκάφους που εξετάζεται.
Έτσι, τα χαρακτηριστικά ευστάθειας και ελέγχου, που αποτελούν ουσιαστικά τις απαιτήσεις χαρακτηριστικών πτήσης ενός αεροσκάφους, οριοθετούνται μεν από τους περιορισμούς του ανθρώπου-πιλότου, όπως περιγράφονται από τους Etkin & Reid [6], αλλά μέσα σε αυτά τα όρια τα χαρακτηριστικά καθορίζονται κατά τρόπο που ταιριάζουν στις επικρατούσες συνθήκες πτήσης. Έτσι, οι απαιτήσεις των λοιπών χαρακτηριστικών πτήσης διαμορφώνονται για τον συγκεκριμένο τύπο ή κλάση του αεροσκάφους (aircraft class) και για τη συγκεκριμένη αποστολή ή φάση της πτήσης (flight phase) που εξετάζεται, όπως τις καταγράφει ο McLean [7]. Επιπλέον, ο βαθμός επάρκειας των χαρακτηριστικών πτήσης ορίζεται με τον όρο «επίπεδο των χαρακτηριστικών πτήσης» (level of flying qualities).
Έτσι, πριν αναφερθούν οι κατάλληλες απαιτήσεις χαρακτηριστικών πτήσης, το αεροσκάφος πρέπει να ταξινομηθεί σε μία κλάση και να οριστεί η φάση της πτήσης που ενδιαφέρει. Στη συνέχεια ο μηχανικός πρέπει να επιτύχει το υψηλότερο επίπεδο χαρακτηριστικών πτήσης για όλες τις αναμενόμενες συνθήκες πτήσης.
5.1. Ταξινόμηση κλάσης των αεροσκαφών
Οι τύποι των αεροσκαφών ταξινομούνται ανάλογα με το μέγεθος και το βάρος τους ως ακολούθως:
• κλάση Ι: μικρά ελαφρά αεροσκάφη,
• κλάση ΙΙ: μεσαίου βάρους, μικρής έως μεσαίας ευελιξίας αεροσκάφη,
• κλάση ΙΙΙ: μεγάλα, βαριά, μικρής έως μεσαίας ευελιξίας αεροσκάφη,
• κλάση ΙV: αεροσκάφη υψηλής ευελιξίας.
5.2. Φάση της πτήσης
Μια πτητική έξοδος ή αποστολή (mission) μπορεί να καθοριστεί πλήρως από μια αλληλουχία συγκεκριμένων ελιγμών (piloting tasks). Δηλαδή μια αποστολή μπορεί να περιγραφεί ως μια διαδοχή πτητικών φάσεων οι οποίες περιλαμβάνουν διάφορους ελιγμούς. Οι φάσεις της πτήσης ομαδοποιούνται σε τρεις κατηγορίες οι οποίες περιλαμβάνουν μια ποικιλία από ελιγμούς που απαιτούν παρόμοια χαρακτηριστικά πτήσης για την επιτυχή τους εκτέλεση. Οι ελιγμοί προσδιορίζονται ξεχωριστά ως προς τους φακέλους πτήσης. Οι κατηγορίες των φάσεων της πτήσης ορίζονται ως ακολούθως:
• Κατηγορία Α: μη τερματικές φάσεις που απαιτούν ταχείς ελιγμούς, ακρίβεια στη διόρθωση (precision tracking) ή ακριβή έλεγχο του ίχνους πτήσης.
• Κατηγορία Β: μη τερματικές φάσεις που απαιτούν βαθμιαίους ελιγμούς, λιγότερη ακρίβεια στη διόρθωση και ακριβή έλεγχο του ίχνους πτήσης.
• Κατηγορία C: τερματική φάση που απαιτεί βαθμιαίους ελιγμούς και ακριβή έλεγχο του ίχνους πτήσης.
5.3. Επίπεδα των χαρακτηριστικών πτήσης
Τα επίπεδα των χαρακτηριστικών πτήσης, περιγράφουν ποσοτικά τον βαθμό που είναι αποδεκτό ένα αεροσκάφος, σε σχέση με την ικανότητά του να εκτελεί με επιτυχία την αποστολή που του έχει ανατεθεί. Τα τρία επίπεδα των χαρακτηριστικών πτήσης, διερευνούν τον φόρτο πτήσης του πιλότου (pilot work load) κατά την εκτέλεση της φάσης της αποστολής και ορίζονται ως ακολούθως:
• Επίπεδο 1: χαρακτηριστικά πτήσης που είναι επαρκή για τη φάση της αποστολής.
• Επίπεδο 2: χαρακτηριστικά πτήσης που είναι επαρκή για τη φάση της αποστολής αλλά με αύξηση στον φόρτο του πιλότου ή/και υποβάθμιση στην αποτελεσματικότητα της αποστολής
• Επίπεδο 3: υποβαθμισμένα χαρακτηριστικά πτήσης αλλά τέτοια ώστε το αεροσκάφος να μπορεί να ελεγχθεί, αλλά με μη επαρκές επίπεδο εκπλήρωσης της αποστολής και υψηλό ή οριακό φόρτο για τον πιλότο.
Τα χαρακτηριστικά πτήσης του επιπέδου 1, υπονοούν ένα πλήρως λειτουργικό αεροσκάφος το οποίο είναι 100% ικανό να επιτύχει στην αποστολή του, με αποδεκτό πάντοτε φόρτο για τον πιλότο. Επομένως, κάθε λάθος ή βλάβη που θα συμβεί στο σκάφος, τους κινητήρες ή σε κάποιο σύστημα υποβαθμίζει το επίπεδο των χαρακτηριστικών πτήσης. Κατά συνέπεια η πιθανότητα να συμβεί μια τέτοια κατάσταση κατά τη διάρκεια μιας αποστολής καθίσταται ένα σημαντικό θέμα προς επίλυση. Έτσι, τα επίπεδα των χαρακτηριστικών πτήσης εξαρτώνται κατά ένα μεγάλο βαθμό από την αξιοπιστία των κρίσιμων εξαρτημάτων του αεροσκάφους.
5.4. Φάκελοι πτήσης
Το επιχειρησιακά όρια που αφορούν στο ύψος, τον αριθμό Mach και τον κάθετο συντελεστή φόρτισης προσδιορίζουν τον φάκελο πτήσης του αεροσκάφους. Οι φάκελοι πτήσης χρησιμοποιούνται, ώστε να περιγράψουν τα απόλυτα όρια του σκάφους (never exceed limits) και επίσης για να περιγράψουν τα λειτουργικά όρια για την εκτέλεση μιας συγκεκριμένης αποστολής ή φάσης της πτήσης.
• Επιτρεπόμενος φάκελος πτήσης (permissible flight envelope): αφορά στα όρια των συνθηκών πτήσης εντός των οποίων ένα αεροσκάφος μπορεί να πετάξει και να ανακτήσει την κανονική του πτητική λειτουργία χωρίς επίδειξη εξαιρετικών ικανοτήτων από πλευράς του πιλότου (exceptional pilot skill).
• Υπηρεσιακός φάκελος πτήσης (service flight envelope): καθορίζει τα όρια ύψους, αριθμού Mach και κάθετου συντελεστή φόρτισης που συμπεριλαμβάνει όλες τις απαιτήσεις της αποστολής. Αυτός ο φάκελος ορίζει τα όρια εντός των οποίων ένα αεροσκάφος μπορεί να πετάξει κανονικά χωρίς κίνδυνο να ξεπεράσει τον επιτρεπόμενο φάκελο πτήσης.
• Επιχειρησιακός φάκελος πτήσης (operational flight envelope): βρίσκεται εντός του υπηρεσιακού φακέλου πτήσης και ορίζει τα όρια του ύψους, αριθμού Mach και κάθετου συντελεστή φόρτισης για κάθε φάση της πτήσης. Είναι απαίτηση ότι το αεροσκάφος πρέπει να είναι ικανό για λειτουργία στα όρια του κατάλληλου επιχειρησιακού φακέλου πτήσης κατά την εκτέλεση της αποστολής του.
6. Βαθμολόγηση των απόψεων του πιλότου
Οι κλίμακες που χρησιμοποιούνται για τη βαθμολόγηση των απόψεων του πιλότου (pilot opinion ratings) χρησιμοποιούνται ήδη μεγάλο χρονικό διάστημα και παράλληλα παρέχουν μια επίσημη διαδικασία για την αξιολόγηση των χαρακτηριστικών πτήσης ενός αεροσκάφος με πειραματικά μέσα. Επειδή το θέμα είναι πολύ υποκειμενικό, οι προσπάθειες για την εύρεση και την εξέλιξη μιας μεθόδου που θα ερμηνεύει την άποψη του πιλότου για ένα συγκεκριμένο αεροσκάφος, έχουν ουσιαστικά μετατρέψει με επιτυχία μια «ανακριβή τέχνη» σε ένα χρήσιμο εργαλείο με άμεση εφαρμογή στα προγράμματα πτητικών δοκιμών.
Η κλίμακα που χρησιμοποιείται σήμερα εξελίχθηκε από τους Cooper και Harper το 1969, όπως αναφέρεται στο [3] και είναι περισσότερο γνωστή ως κλίμακα Cooper-Harper (Cooper-Harper rating scale). Η κλίμακα βαθμολόγησης Cooper-Harper, χρησιμοποιείται για την εκτίμηση των χαρακτηριστικών πτήσης ή ειδικότερα των χαρακτηριστικών πτήσης ενός αεροσκάφους σε μια δεδομένη φάση. Οι διαδικασίες που ακολουθούνται για τη διενέργεια των πτητικών δοκιμών, καθώς και η μέθοδος για τη μετά την πτήση καταγραφή και ερμηνεία των απόψεων του δοκιμαστή είναι καταγεγραμμένες στην ίδια επίσης κλίμακα. Το αποτέλεσμα της αξιολόγησης είναι ένας βαθμός 1-10, όπου το 1 αντιστοιχεί σε εξαιρετικά χαρακτηριστικά πτήσης και χαμηλό φόρτο για τον πιλότο ενώ το 10 υπονοεί ένα αεροσκάφος με πολλά προβλήματα που αφορούν σε αυτά τα χαρακτηριστικά. Η υιοθέτηση λοιπόν μιας κοινής διαδικασίας για την αξιολόγηση των χαρακτηριστικών ευκολίας χειρισμού επιτρέπει στους πιλότους να δηλώνουν ξεκάθαρα την εκτίμησή τους χωρίς παρερμηνείες.
Στον πίνακα 7.1 φαίνεται μια περίληψη της κλίμακας βαθμολόγησης Cooper-Harper. Είναι επίσης σύνηθες και ταυτόχρονα χρήσιμος, ο ορισμός μιας ισοδυναμίας μεταξύ της κλίμακας βαθμολόγησης Cooper-Harper, η οποία ουσιαστικά είναι μία κλίμακα ποιοτικής περιγραφής, με τα επίπεδα των χαρακτηριστικών πτήσης που περιγράφουν ποσοτικά τα χαρακτηριστικά πτήσης. Αυτό, επιτρέπει την εύκολη αντιστοίχιση των χαρακτηριστικών πτήσης μεταξύ του τομέα που καλύπτουν οι πιλότοι δοκιμών και του αναλυτικού τομέα που καλύπτουν οι μηχανικοί. Η ισοδυναμία συνοψίζεται στον πίνακα 7.2.
|
Επάρκεια για το επιλεγμένο έργο |
Χαρακτηριστικά αεροσκάφους |
Απαιτήσεις πιλότου (φόρτος) |
Βαθμός πιλότου |
|
Ικανοποιητική |
Εξαιρετικά |
Πολύ χαμηλές |
1 |
|
Ικανοποιητική |
Καλά |
Χαμηλές |
2 |
|
Ικανοποιητική |
Αρκετά |
Ελάχιστη συμμετοχή |
3 |
|
Μη ικανοποιητική-Επιδέχεται βελτίωσης |
Ελάχιστες δυσλειτουργίες |
Μέτρια συμμετοχή |
4 |
|
Μη ικανοποιητική-Επιδέχεται βελτίωσης |
Μέτριες δυσλειτουργίες |
Υπολογίσιμη συμμετοχή |
5 |
|
Μη ικανοποιητική-Επιδέχεται βελτίωσης |
Ανεκτές δυσλειτουργίες |
Εκτεταμένη συμμετοχή |
6 |
|
Μη ικανοποιητική-Απαιτείται βελτίωση |
Μεγάλες δυσλειτουργίες |
Ανέφικτη η επαρκής συμπεριφορά |
7 |
|
Μη ικανοποιητική-Απαιτείται βελτίωση |
Μεγάλες δυσλειτουργίες |
Υπολογίσιμη συμμετοχή για τον έλεγχο |
8 |
|
Μη ικανοποιητική-Απαιτείται βελτίωση |
Μεγάλες δυσλειτουργίες |
Έντονη συμμετοχή για τον έλεγχο |
9 |
|
Καταστροφική-Υποχρεωτική βελτίωση |
Μεγάλες δυσλειτουργίες |
Πιθανή απώλεια ελέγχου |
10 |
Πίνακας 7.1 Κλίμακα βαθμολόγησης Cooper -Harper
|
Επίπεδο χαρακτηριστικών πτήσης |
Επίπεδο 1 |
Επίπεδο 2 |
Επίπεδο 3 |
Κάτω από Επίπεδο 3 |
||||||
|
Κλίμακα βαθμολόγησης Cooper-Harper |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
Πίνακας 7.2 Αντιστοιχία των επιπέδων χαρακτηριστικών πτήσης με την κλίμακα βαθμολόγησης Cooper-Harper
7. Απαιτήσεις διαμήκων χαρακτηριστικών
7.1. Το κριτήριο «αποτυπώματος του αντίχειρα»
Όπως αναλύθηκε και προηγουμένως, οι παραδοσιακοί δείκτες των διαμήκων βραχυπρόθεσμων χαρακτηριστικών ευκολίας χειρισμού του αεροσκάφους έχουν συνδεθεί με τον λόγο απόσβεσης και τη φυσική συχνότητα της μικρής περιόδου. Η μακροχρόνια εμπειρία των μηχανικών έχει βοηθήσει ώστε να καθοριστούν σε σημαντικό βαθμό εκείνα τα δυναμικά χαρακτηριστικά της μικρής περιόδου που οδηγούν σε αντίστοιχα ικανοποιητικά χαρακτηριστικά ευκολίας χειρισμού.
Κατά τα πρώτα χρόνια μετά τον Β’ παγκόσμιο πόλεμο, διεξήχθησαν πολλές πτήσης δοκιμής με πειραματικά αεροσκάφη μεταβλητής ευστάθειας, με αποκλειστικό στόχο τη διερεύνηση των χαρακτηριστικών πτήσης και ευκολίας χειρισμού. Ειδικότερα, το μεγαλύτερο μέρος της σχετικής πειραματικής εργασίας είχε ως αντικείμενο τη διαμήκη βραχυπρόθεσμη ευκολία χειρισμού. Αυτή η έρευνα κατέληξε στον προσδιορισμό πολλών κριτηρίων ευκολίας χειρισμού και στη σύνταξη προδιαγραφών για τα επιθυμητά χαρακτηριστικά πτήσης. Ένα από τα αυτά τα παλαιότερα κριτήρια χαρακτηριστικών πτήσης, το λεγόμενο κριτήριο αποτυπώματος του αντίχειρα (thumb print criterion) της μικρής περιόδου [5], κατέστη ένα από τα κύρια εργαλεία των μηχανικών ήδη από τη δεκαετία του 50’. Το κριτήριο αυτό προσφέρει στους σχεδιαστές ένα οδηγό που αφορά τον καλύτερο συνδυασμό της συχνότητας και της απόσβεσης της διαμήκους μικρής περιόδου, ώστε να επιτευχθούν ικανοποιητικά χαρακτηριστικά ευκολίας χειρισμού.
Πρέπει όμως πάντοτε να λαμβάνεται υπόψη ότι το πιο πάνω κριτήριο αφορά εμπειρικές πληροφορίες και βασίζεται στην άποψη που σχηματίζει ο πιλότος για το αεροσκάφος (pilot opinion). Η κοινή μορφή στην οποία παρουσιάζεται το κριτήριο αυτό απεικονίζεται στο σχήμα 7.2 ενώ η συγκεκριμένη απεικόνιση αφορά τα τυπικά κλασσικά αεροσκάφη, Όπως προκύπτει από το σχ. 7.2, η βέλτιστη φυσική συχνότητα χωρίς απόσβεση της μικρής περιόδου είναι ωs ≈ 3 rad/sec με αντίστοιχο λόγο απόσβεσης ζs = 0.6:0.8. Αν και το κριτήριο εφαρμόζεται ακόμη και σήμερα στα σύγχρονα αεροσκάφη, η επίτευξη εξαιρετικών χαρακτηριστικών για τη δυναμική της μικρής περιόδου δεν εγγυάται απαραίτητα και εξαιρετικά χαρακτηριστικά ευκολίας χειρισμού. Για την ακρίβεια πολλοί είναι οι παράγοντες οι οποίοι διαδραματίζουν σημαντικό ρόλο στη διαμόρφωση των χαρακτηριστικών ευκολίας χειρισμού, κάποιοι από τους οποίους θα αναπτυχθούν στη συνέχεια.
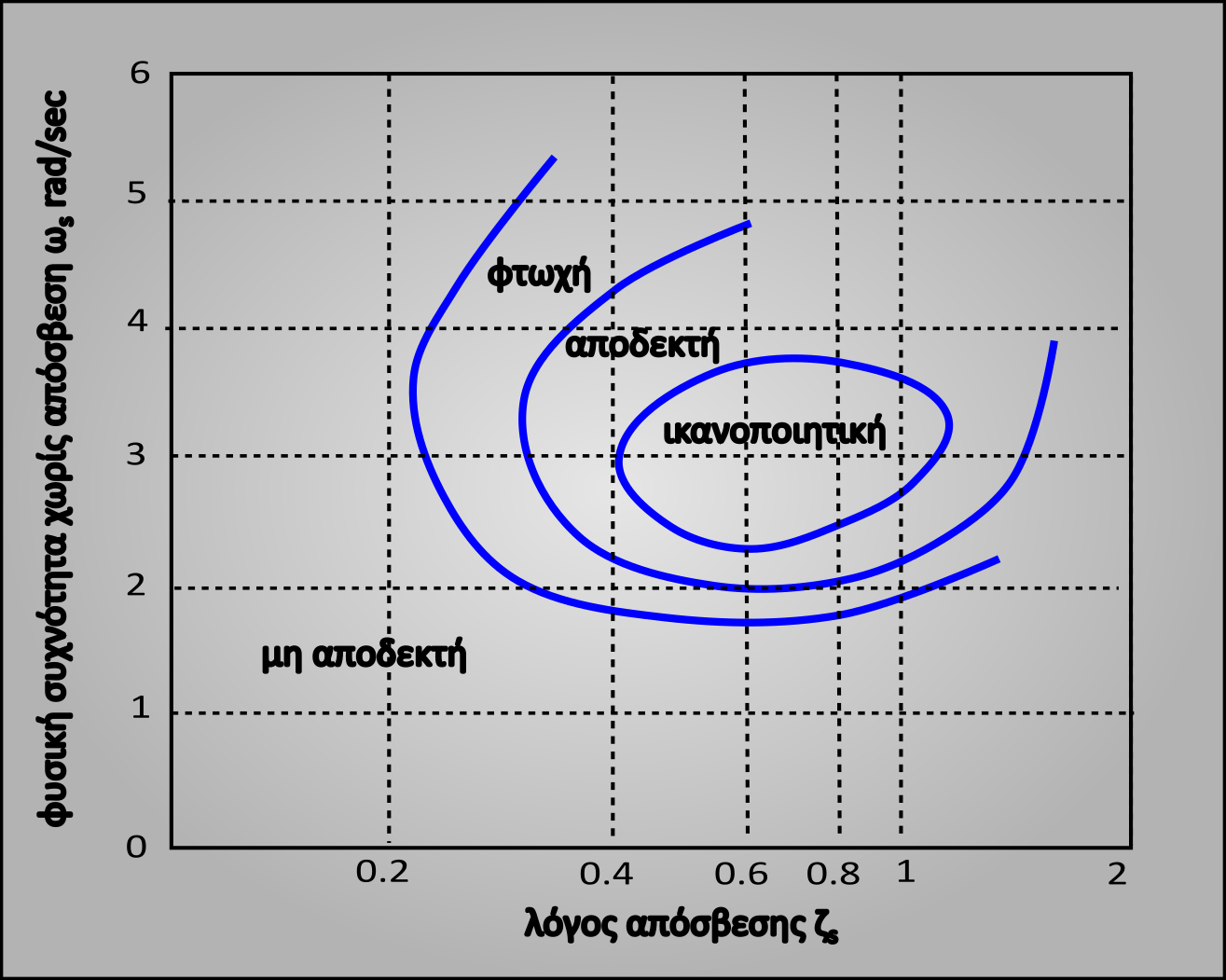
Σχήμα 7.2 Κριτήριο αντίχειρα για τη σχέση της ποιότητας της ευκολίας χειρισμών με τη συχνότητα και την απόσβεση της μικρής περιόδου.
7.2 Χρονική καθυστέρηση της γωνίας πρόσπτωσης
Η χρονική καθυστέρηση της γωνίας πρόσπτωσης Τθ2 παίζει ένα κρίσιμο και πολύ σημαντικό ρόλο στον καθορισμό των διαμήκων χαρακτηριστικών ευκολίας χειρισμού του αεροσκάφους.
Για τα κλασσικά υποηχητικά αεροσκάφη, ηΤθ2 διατηρείται σταθερή σε όλο το εύρος του φακέλου πτήσης και τον λόγο αυτό, η καθυστέρηση της γωνίας πρόσπτωσης δεν είχε λάβει την απαραίτητη προσοχή. Όμως, καθώς τα αεροσκάφη έχουν γίνει μεγαλύτερα, ενώ συγχρόνως τα ύψη και οι ταχύτητες που επιχειρούν έχουν αυξηθεί δραστικά, οι μεταβολές της καθυστέρησης της γωνίας πρόσπτωσης Τθ2 σε όλο στο εύρος του φακέλου πτήσης των τυπικών σύγχρονων αεροσκαφών υψηλών επιδόσεων είναι σημαντική και δεν μπορεί να αγνοηθεί.
Η καθυστέρηση της γωνίας πρόσπτωσης έχει καταστεί το ίδιο σημαντική για τον καθορισμό των διαμήκων βραχυπρόθεσμων χαρακτηριστικών ευκολίας χειρισμού, όσο η απόσβεση και η συχνότητα της μικρής περιόδου. Ο Gibson (1995) προτείνει ότι η Τθ2 τυπικά μπορεί να κυμαίνεται από λιγότερο από 0.5 sec για υψηλές ταχύτητες στο επίπεδο της θάλασσας, σε περισσότερο από 4.0 sec σε χαμηλές ταχύτητες σε μεγάλα ύψη.
7.3. Προδιαγραφές παραμέτρων διαμήκους δυναμικής ευστάθειας
Όπως αναλύθηκε προηγουμένως, η κατακόρυφη συνιστώσα της επιτάχυνσης, όπως αυτή εκφράζεται στην (7.24) μέσω του ανηγμένου συντελεστή φόρτισης ηα, αποτελεί βασική παράμετρο των χαρακτηριστικών ευκολίας χειρισμών, όπως και η παράμετρος αναμενόμενου ελέγχου CAP. Oι απαιτήσεις ποιότητας που αφορούν αυτά τα δύο μεγέθη, απεικονίζονται σε διαγράμματα [7], παραδείγματα των οποίων φαίνονται στο σχήμα 7.3.
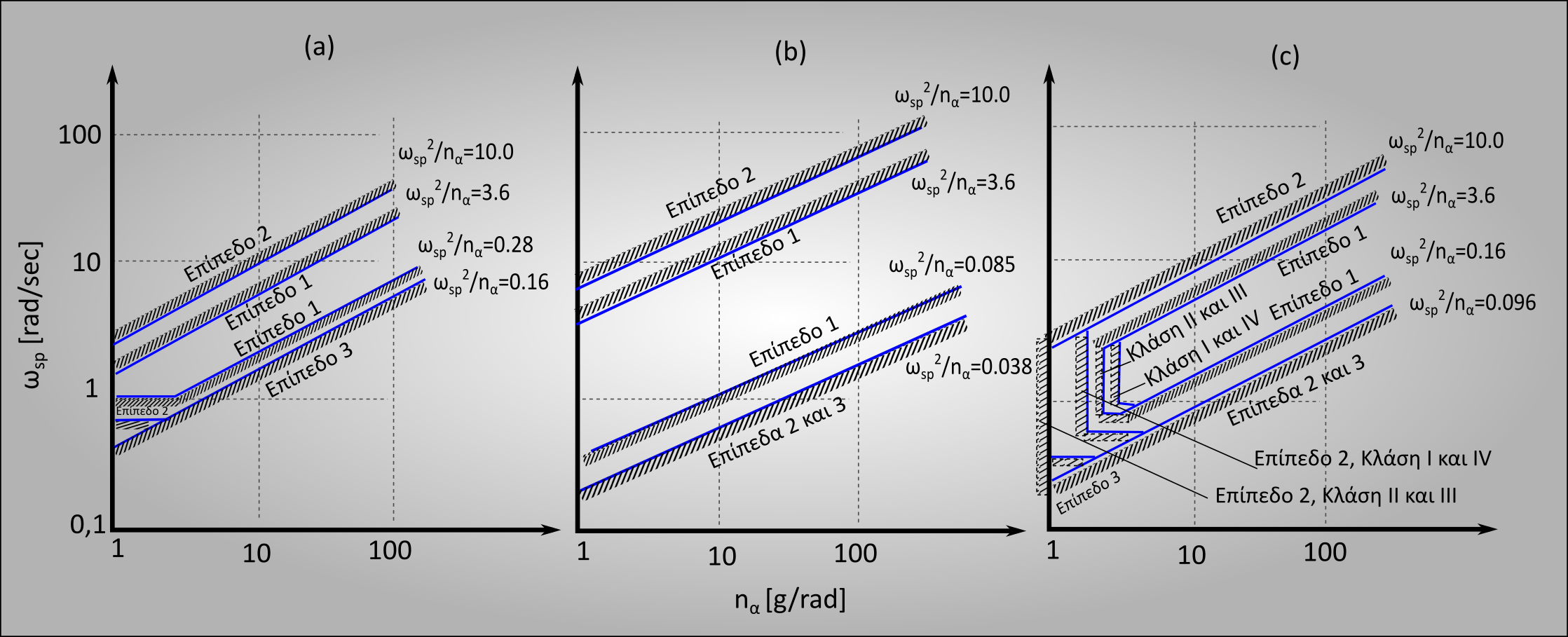
Σχήμα 7.3 Απαιτήσεις συχνότητας μικρής περιόδου σαν συνάρτηση του ανηγμένου συντελεστή φόρτισης (a) CAT A. (b) CAT Β. (c) CAT. C.
Συνήθως χρησιμοποιούνται τρεις παρόμοιες απεικονίσεις, μία για κάθε κατηγορία φάσης πτήσης. Τα όρια που διακρίνονται στο σχήμα αυτό ισοδυναμούν με καμπύλες σταθερής CAP, η οποία, με βάση τη σχέση (7.31), εξαρτάται από τη συχνότητα μικρής περιόδου και από τον ανηγμένο συντελεστή φόρτισης ηα . Επίσης, με βάση τη σχέση (7.32) είναι ανάλογη με το περιθώριο στατικής ευστάθειας Ηm σε ελιγμούς.
Παράλληλα, ο ανηγμένος συντελεστής φόρτισης ηα , όπως φαίνεται και από τη σχέση (7.25), αυξάνεται με την ταχύτητα του αεροσκάφους. Κατά συνέπεια, οι πιο χαμηλές τιμές της nα συσχετίζονται με τα χαρακτηριστικά χαμηλής ταχύτητας του αεροσκάφους και το αντίστροφο. Όσο η ταχύτητα αυξάνεται, η αεροδυναμική ακαμψία πρόνευσης του αεροσκάφους επίσης αυξάνεται, γεγονός που προκαλεί αύξηση της συχνότητας της μικρής περιόδου. Αυτό το φυσικό φαινόμενο αντικατοπτρίζεται στις απαιτήσεις του σχ. 7.3, καθώς τα καθορισμένα όρια επιτρέπουν αύξηση της συχνότητας με την αύξηση της nα.
Τα αποδεκτά όρια στην ευστάθεια της μικρής περιόδου περιγράφονται ποσοτικά ως προς τις μέγιστες και τις ελάχιστες τιμές του λόγου απόσβεσης, σε σχέση με τις μεταβολές στη κατηγορία της φάσης και στο επίπεδο των χαρακτηριστικών πτήσης, όπως αναλύεται στον πίνακα 7.3. Οι μεγαλύτερες της μονάδας τιμές του λόγου απόσβεσης της μικρής περιόδου προφανώς υπονοούν ότι είναι αποδεκτή μια ευσταθής μη ταλαντωτική μορφή.
|
|
Επίπεδο 1 |
Επίπεδο 2 |
Επίπεδο 3 |
||
|
Φάση πτήσης |
ζs min |
ζs max |
ζs min |
ζs max |
ζs min |
|
CAT A |
0.35 |
1.30 |
0.25 |
2.00 |
0.1 |
|
CAT B |
0.30 |
2.00 |
0.20 |
2.00 |
0.1 |
|
CAT C |
050 |
1.30 |
0.35 |
2.00 |
0.25 |
Πίνακας 7.3 Αποδεκτές οριακές τιμές του λόγου απόσβεσης μικρής περιόδου
Οι μέγιστες και οι ελάχιστες τιμές για τη συχνότητα του φυγοειδούς δεν μπορούν να περιγραφούν ποσοτικά. Όμως συνίσταται οι συχνότητες του φυγοειδούς και της μικρής περιόδου να είναι επαρκώς διαχωρισμένες. Έχει προταθεί ότι οι δυσκολίες στον χειρισμό μπορεί να γίνουν ενοχλητικές εφόσον ο λόγος φυσικής συχνότητας των δύο μορφών γίνει ωp/ωs > 0,1. Γενικά η δυναμική του φυγοειδούς είναι αποδεκτή, με την προϋπόθεση ότι η μορφή αυτή είναι ευσταθής και ότι ο λόγος απόσβεσης βρίσκεται μέσα στα όρια που φαίνονται στον πίνακα 7.4.
|
Επίπεδο χαρακτηριστικών πτήσης |
Ελάχιστο ζp |
|
1 |
0.04 |
|
2 |
0 |
|
3 |
Ασταθές, περίοδος Τp > 55 sec |
Πίνακας 7.4 Αποδεκτές οριακές τιμές του λόγου απόσβεσης του φυγοειδούς
8. Απαιτήσεις των εγκάρσιων χαρακτηριστικών
Αντίθετα με τις απαιτήσεις των χαρακτηριστικών διαμήκους δυναμικής οι απαιτήσεις στην εγκάρσια διεύθυνση δεν αναφέρονται στη στατική ευστάθεια με τον ίδιο τρόπο. Γενικά η στατική ευστάθεια στην εγκάρσια διεύθυνση είναι ανεξάρτητη από τη θέση του κέντρου βάρους και τις συνθήκες πτήσης, ενώ εφόσον καθοριστεί από τον αεροδυναμικό σχεδιασμό του αεροσκάφους, δεν μεταβάλλεται σημαντικά.
Οι περισσότερες αμφιβολίες επικεντρώνονται στην πρόβλεψη της ύπαρξης επαρκούς ισχύος ελέγχου, ειδικά σε μόνιμες ασύμμετρες συνθήκες πτήσης, ή σε κάποιες άλλες, ενδεχομένως οριακές συνθήκες κατά τη συμμετρική πτήση. Είναι δε ουσιαστικής σημασίας οι δυνάμεις ελέγχου που απαιτούνται για να αντιμετωπιστούν τέτοιες συνθήκες να μην ξεπεράσουν τις φυσικές ικανότητες του μέσου όρου των πιλότων.
8.1. Απαιτήσεις υποχώρησης περιστροφής
Επειδή αυτή η μορφή περιγράφει τη βραχυπρόθεσμη εγκάρσια δυναμική, αποτελεί παράγοντα κρίσιμης σημασίας στον καθορισμό των εγκάρσιων χαρακτηριστικών ευκολίας χειρισμού. Για αυτόν τον λόγο, οι αποδεκτές οριακές τιμές της χρονικής σταθεράς Τr της υποχώρησης περιστροφής, όπως αυτή ορίζεται στη σχέση (5.23), φαίνεται στον πίνακα 7.5.
|
|
|
Μέγιστη τιμή Τr(s) |
||
|
Κλάση αεροσκάφους |
Φάση Πτήσης |
Επίπεδο 1 |
Επίπεδο 2 |
Επίπεδο 3 |
|
Ι,ΙV |
A,C |
1.0 |
1.4 |
- |
|
II,III |
A,C |
1.4 |
3.0 |
- |
|
I,II,III,IV |
B |
1.4 |
3.0 |
- |
Πίνακας 7.5 Αποδεκτές οριακές τιμές της χρονικής σταθεράς Τr της υποχώρησης περιστροφής
Φαίνεται ότι δεν υφίσταται αποδεκτή συμφωνία για τη μέγιστη τιμή της χρονικής σταθεράς για το επίπεδο 3 των χαρακτηριστικών πτήσης. Τυπικές εκτιμήσεις αναφέρουν ως όριο τιμές 6-8 sec, ενώ εναλλακτικές προτάσεις έχουν ως όριο τα 10sec.
Εναλλακτικά, είναι επίσης συνηθισμένο να προδιαγράφεται η απόδοση της υποχώρησης περιστροφής με όρους μεταβολής της γωνίας περιστροφής σε συγκεκριμένο χρονικό διάστημα, σαν απόκριση σε μια εντολή μεταβολής περιστροφής μοναδιαίας βαθμίδας. Οι σχετικές γωνίες περιστροφής και οι απαιτούμενοι χρόνοι φαίνονται στον πίνακα 7.6.
|
Κλάση |
Κατηγορία φάσης πτήσης |
Γωνία κλίσης σε δεδομένο χρόνο |
||
|
Επίπεδο 1 |
Επίπεδο 2 |
Επίπεδο 3 |
||
|
Ι |
A |
60° σε 1.3 sec |
60° σε 1.7 sec |
60° σε 2.6 sec |
|
B |
60° σε 1.7 sec |
60° σε 2.5 sec |
60° σε 3.4 sec |
|
|
C |
30° σε 1.3 sec |
30° σε 1.8 sec |
30° σε 2.6 sec |
|
|
ΙΙ |
A |
45° σε 1.4 sec |
45° σε 1.9 sec |
45° σε 2.8 sec |
|
B |
45° σε 1.9 sec |
45° σε 2.8 sec |
45° σε 3.0 sec |
|
|
C |
30° σε 2.5 sec |
30° σε 3.5 sec |
30° σε 5.0 sec |
|
|
ΙΙΙ |
A |
30° σε 1.5 sec |
30° σε 1.3 sec |
30° σε 3.0 sec |
|
B |
30° σε 2.0 sec |
30° σε 2.0 sec |
30° σε 4.0 sec |
|
|
C |
30° σε 3.0 sec |
30° σε 3.0 sec |
30° σε 6.0 sec |
|
|
IV |
A |
90° σε 1.3 sec |
90° σε 1.7 sec |
90° σε 2.6 sec |
|
B |
60° σε 1.7 sec |
60° σε 2.5 sec |
60° σε 3.4 sec |
|
|
C |
30° σε 1.0 sec |
30° σε 1.3 sec |
30° σε 2.0 sec |
|
Πίνακας 7.6 Τιμές και αντίστοιχοι μέγιστοι χρόνοι γωνίας περιστροφής
8.2. Απαιτήσεις σπειροειδούς
Το ευσταθές σπειροειδές είναι αποδεκτό, ανεξάρτητα από τη χρονική σταθερά. Επειδή η μορφή αυτή προκαλεί μια πολύ αργή δυναμική συμπεριφορά, δεν αποτελεί τόσο κρίσιμο παράγοντα για την ευκολία χειρισμού εκτός και εάν είναι πολύ ασταθής. Για αυτόν τον λόγο, ο ελάχιστος αποδεκτός βαθμός της αστάθειας ποσοτικοποιείται ως προς τον απαιτούμενο χρόνο Τ2 διπλασιασμού της γωνίας περιστροφής, σε μια αρχική διαταραχή της γωνίας περιστροφής έως 200. Ο σχετικές οριακές τιμές φαίνονται στον πίνακα 7.7.
|
|
Μέγιστη τιμή Τ2 |
||
|
Φάση Πτήσης |
Επίπεδο 1 |
Επίπεδο 2 |
Επίπεδο 3 |
|
A,C |
12 |
8 |
5 |
|
Β |
20 |
8 |
5 |
Πίνακας 7.7 Τιμές και αντίστοιχοι μέγιστοι χρόνοι γωνίας περιστροφής σε σπειροειδή απόκλιση
Για τη χρήση των πινάκων, πολλές φορές εξυπηρετεί περισσότερο η έκφραση των απαιτήσεων του σπειροειδούς να γίνει ως προς τη χρονική σταθερά Ts του σπειροειδούς, όπως αυτή εκφράζεται από τη σχέση (5.34), παρά ως προς τον απαιτούμενο χρόνο Τ2 διπλασιασμού της γωνίας περιστροφής. Εάν υποτεθεί ότι τα χαρακτηριστικά της ασταθούς μορφής προκαλούν καθαρά εκθετική απόκλιση στην περιστροφή, μπορεί να αποδειχθεί ότι η χρονική σταθερά Ts και ο απαιτούμενος χρόνος διπλασιασμού της γωνίας κλίσης Τ2 σχετίζονται με την ακόλουθη έκφραση :
|
|
|
(7.33) |
8.3. Απαιτήσεις ολλανδικής περιστροφής
Επειδή η ολλανδική περιστροφή είναι βραχυπρόθεσμη μορφή, επηρεάζει σημαντικά τα χαρακτηριστικά ευκολίας χειρισμού και συνεπώς οι απαιτήσεις στην απόσβεση και στη συχνότητα καθορίζονται με αρκετή λεπτομέρεια. Η ολλανδική περιστροφή είναι το ανάλογο της διαμήκους μορφής ταλάντωσης της μικρής περιόδου στην εγκάρσια διεύθυνση και έχει συχνότητα της ίδιας τάξης μεγέθους. Όμως, σε αντίθεση με την ταλάντωση της μικρής περιόδου, η ολλανδική περιστροφή δεν είναι τόσο κρίσιμη για την ευκολία χειρισμού. Για την ακρίβεια, η περίπτωση ολλανδικής περιστροφής με χαμηλή απόσβεση γίνεται αντιληπτή ουσιαστικά ως κάτι ενοχλητικό στον χειρισμό του αεροσκάφους, παρά ως ένα σοβαρό πρόβλημα ευστάθειας.
Τα αποδεκτά ελάχιστα όρια για το λόγο απόσβεσης, τη φυσική συχνότητα χωρίς απόσβεση και το γινόμενο του λόγου απόσβεσης με τη συχνότητα καθορίζονται για διαφορετικούς συνδυασμούς κλάσης του αεροσκάφους και κατηγορία φάσης της πτήσης όπως φαίνεται στον πίνακα 7.8.
|
|
|
Επίπεδο 1 |
Επίπεδο 2 |
Επίπεδο 3 |
|||||
|
Κλάση Αεροσκάφους |
Φάση πτήσης |
ζd |
ζdωd |
ωd |
ζd |
ζdωd |
ωd |
ζd |
ωd |
|
Ι,ΙV |
CAT A |
0.19 |
0.35 |
1.0 |
0.02 |
0.05 |
0.5 |
0 |
0.4 |
|
II,III |
CAT A |
0.19 |
0.35 |
0.5 |
0.02 |
0.05 |
0.5 |
0 |
0.4 |
|
Όλες |
CAT B |
0.08 |
0.15 |
0.5 |
0.02 |
0.05 |
0.5 |
0 |
0.4 |
|
I,IV |
CAT C |
0.08 |
0.15 |
1.0 |
0.02 |
0.05 |
0.5 |
0 |
0.4 |
|
II,III |
CAT C |
0.08 |
0.15 |
0.5 |
0.02 |
0.05 |
0.5 |
0 |
0.4 |
Πίνακας 7.8 Ελάχιστα όρια λόγου απόσβεσης και συχνότητας Ολλανδικής περιστροφής
Βιβλιογραφία/Αναφορές
|
Michael V. Cook, Flight Dynamics Principles - A Linear Systems Approach to Aircraft Stability and Control, 2nd ed. Oxford, UK: Elsevier Ltd, 2007. |
|
|
Robert C. Nelson, Flight Stability and Automatic Control, 2nd ed. Singapore: WCB/McGraw-Hill, 1998. |
|
|
Bernard Etkin & Lloyd D. Reid, Dynamics of Flight: Stability and Control, 3rd ed. Toronto, Canada: John Wiley & Sons, Inc., 1996. |
|
|
Donald McLean, Automatic Flight Control Systems. Hertfordshire, UK: Prentice Hall International (UK) Ltd, 1990. |
|
|
Δ. Ροζής, "Επισκόπηση δυναμικών χαρακτηριστικών και χαρακτηριστικών ελέγχου πτήσης αεροσκαφών", ΕΜΠ, Αθήνα, MSc Thesis 2006. |
8: ΣΥΣΤΗΜΑΤΑ ΕΠΑΥΞΗΣΗΣ ΤΗΣ ΕΥΣΤΑΘΕΙΑΣ ΚΑΙ ΑΥΤΟΜΑΤΟΙ ΠΙΛΟΤΟΙ
Αφού γίνει σαφής η ανάγκη της ύπαρξης αυτόματων συστημάτων τα οποία δρουν στις επιφάνειες ελέγχου σε συνεργασία με τον πιλότο, γίνεται σύντομη περιγραφή των διάφορων τύπων συστημάτων επαύξησης της ευστάθειας και μελέτη της δομής και της λειτουργίας τους. Παρουσιάζονται επίσης, τα βασικά συστήματα αυτομάτων πιλότων.
Προαπαιτούμενη γνώση
Είναι απαραίτητες βασικές γνώσεις ΣΑΕ, όπως η έννοια του τόπου των ριζών, ο έλεγχος με συστήματα κλειστού βρόχου και ο σχεδιασμός κατευθυντών, τα οποία εν μέρει καλύπτονται στο Παράρτημα Β. Επίσης, απαιτείται η κατανόηση των περί μορφών ευστάθειας που μελετήθηκαν στα κεφάλαια 4 και 5.
1. Εισαγωγή
Σε περίπτωση που ένα αεροσκάφος δεν διαθέτει τα επιθυμητά δυναμικά χαρακτηριστικά, είναι απαραίτητη η τροποποίηση του σχεδιασμού του. Εκτός όμως από ελάχιστες περιπτώσεις, πρακτικά δεν είναι δυνατόν να τροποποιηθεί ο αεροδυναμικός σχεδιασμός του αεροσκάφους, ιδίως στο τελικό στάδιο του σχεδιασμού. Επιπλέον, πολύ συχνά τα προβλήματα δυναμικής συμπεριφοράς πηγάζουν όχι απαραίτητα από την αεροδυναμική σχεδίαση αυτή καθαυτή, αλλά από την απαίτηση το αεροσκάφος να επιχειρεί σε έναν εκτεταμένο φάκελο πτήσης, γεγονός που διαφοροποιεί έντονα τη δυναμική του συμπεριφορά. Η προτιμώμενη επομένως λύση είναι η τεχνητή τροποποίηση των δυναμικών χαρακτηριστικών του αεροσκάφους, ώστε να αυξηθούν τα χαρακτηριστικά ευστάθειας του αεροσκάφους.
Αυτό επιτυγχάνεται με την εισαγωγή αρνητικής ανάδρασης (χρησιμοποιώντας τη σημειολογία του Nelson [5]), μέσω της οποίας χρησιμοποιούνται τα φυσικά μεγέθη της απόκρισης του αεροσκάφους (σήματα εξόδου), όπως αυτά μετρούνται από κατάλληλους αισθητήρες και μέσω κατάλληλων συστημάτων ελέγχου και επενεργητών, δρουν και οδηγούν κατάλληλα τις επιφάνειες και τους λοιπούς μηχανισμούς αεροδυναμικού ελέγχου του αεροσκάφους. Το σύστημα κλειστού βρόχου (closed loop) που προκύπτει με αυτόν τον τρόπο ονομάζεται «Σύστημα Επαύξησης της Ευστάθειας» (Stability Augmentation System-SAS), και μαζί με τα μηχανικά μέρη και τη δομή του αεροσκάφους, ονομάζεται ως «επαυξημένο αεροσκάφος» (augmented aircraft).
Εκτός όμως από τα συστήματα επαύξησης της ευστάθειας, ένα διαφορετικό σύνολο συστημάτων αυτομάτου ελέγχου επιτρέπουν στον πιλότο να εκτελεί διάφορους ελιγμούς με αυτόματο τρόπο και για τον λόγο αυτό, ονομάζονται «αυτόματοι πιλότοι» (autopilots). Σκοπός της χρήσης τους είναι κατά πρώτον να απελευθερώνουν τον άνθρωπο από το σχετικά μονότονο έργο της χειροκίνητης πτήσης σε σταθερές συνθήκες και κατά δεύτερον να υποβοηθούν τους χειρισμούς που απαιτούνται για την εκτέλεση ελιγμών ακριβείας υπό δυσμενείς συνθήκες, κάτι που πολλές φορές μπορεί να ξεπερνά τις ανθρώπινες ικανότητες. Οι λειτουργίες των αυτόματων πιλότων (autopilots control modes) ποικίλουν από τις πιο απλές, όπως για παράδειγμα η αυτόματη διατήρηση του ύψους ή της ταχύτητας, έως τις πιο πολύπλοκες όπως είναι η αυτοματοποιημένη πλοήγηση ή η διαδικασία προσγείωσης.
Τόσο τα συστήματα επαύξησης της ευστάθειας, όσο και οι αυτόματοι πιλότοι αποτελούν μορφές συστημάτων ελέγχου πτήσης (Flight Control Systems-FCS). Στο σχήμα 8.1 φαίνεται το δομικό διάγραμμα ενός τυπικού ηλεκτρονικού συστήματος ελέγχου πτήσης (Electronic Flight Control System-EFCS).
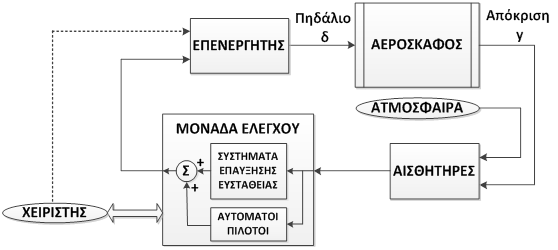
Σχήμα 8.1 Δομικό διάγραμμα τυπικού ηλεκτρονικού συστήματος ελέγχου πτήσης (electronic flight control system-EFCS).
Τα ηλεκτρονικά συστήματα ελέγχου πτήσης, λαμβάνουν μετρήσεις (σήματα εισόδου, σήματα ελέγχου) τα οποία προέρχονται τόσο από αισθητήρες που παρακολουθούν την κίνηση του αεροσκάφους, όπως π.χ. γυροσκόπια (ρυθμού ή ολοκληρωτικά), επιταχυνσιόμετρα, αισθητήρες γωνίας πρόσπτωσης κτλ., όσο και από δεδομένα της ατμόσφαιρας, όπως π.χ. ταχύτητα αέρα, ύψος, θερμοκρασία, κτλ.
Οι νόμοι ελέγχου (control laws) και οι αντίστοιχες ηλεκτρονικές μονάδες ελέγχου (ρυθμιστές/controllers), δομούνται σε δύο επίπεδα βρόχων ανάδρασης. Ο εσωτερικός βρόχος αφορά τα συστήματα επαύξησης της ευστάθειας και ο εξωτερικός αφορά τις διάφορες μορφές των αυτόματων πιλότων. Οι ρυθμιστές επεξεργάζονται τα σήματα εισόδου και ανάλογα με τη μορφή του επιθυμητού ελέγχου, παράγουν εντολές (σήματα εξόδου) σε ηλεκτρική μορφή. Τα σήματα εξόδου από τους ρυθμιστέςε του εσωτερικού και του εξωτερικού βρόχου αθροίζονται ηλεκτρονικά.
Το σήμα (signal) που προκύπτει, ενισχύεται μέσω κατάλληλων ενισχυτών (amplifier) και σερβομηχανισμών (servomechanisms) και οδηγείται σε επενεργητές (actuators), οι οποίοι οδηγούν τις επιφάνειες ελέγχου (π.χ. πηδάλια). Οι ενισχυτές και οι σερβομηχανισμοί αυξάνουν τη διαθέσιμη ισχύ, ώστε να μπορούν να υπερνικηθούν τα αεροδυναμικά φορτία που εφαρμόζονται στις επιφάνειες ελέγχου.
Αν και στο σχήμα 8.1 απεικονίζεται μόνο ένας άξονας ελέγχου, το FCS μπορεί γενικά να περιλαμβάνει ρυθμιστές κλειστού βρόχου που λειτουργούν ταυτόχρονα σε όλους τους άξονες ελέγχου του αεροσκάφους, ενώ μπορεί να γίνει η κατάλληλη επέκταση ώστε να συμπεριλάβει και τον έλεγχο κλειστού βρόχου της ώθησης του κινητήρα. Έτσι, εφαρμόζεται η πολυμεταβλητή ανάδραση (multivariable feedback), η οποία περιλαμβάνει πολλούς διαφορετικούς βρόχους ελέγχου και αποτελεί την τυπική αρχιτεκτονική σχεδίαση των σύγχρονων FCS.
Μέσα στον πιλοτήριο (cockpit) υπάρχει ένας πίνακας ελέγχου (control panel) που επιτρέπει στον πιλότο να εποπτεύει τη συνολική λειτουργία του αεροσκάφους και να δίνει τις εντολές που επιθυμεί. Τα συστήματα ελέγχου ενός SAS, συνήθως περιλαμβάνουν μόνο τα ελάχιστα απαραίτητα, επιτρέποντας στον πιλότο να επιτηρεί το σύστημα για τη σωστή του λειτουργία. Σε κάποιες περιπτώσεις το σύστημα είναι εφοδιασμένο με κάποιους διακόπτες που απομονώνουν μέρη του συστήματος για την περίπτωση βλάβης. Συνήθως όμως, επειδή τα SASs αφορούν την αύξηση της ευστάθειας του αεροσκάφους, και κατά συνέπεια θεωρούνται ως ζωτικό κομμάτι για την εύρυθμη και ασφαλή λειτουργία του, τίθενται και παραμένουν αυτόματα σε λειτουργία, ανεξάρτητα από τις εντολές του πιλότου. Η ασφαλής και αξιόπιστη λειτουργία τους διασφαλίζεται με κατάλληλες αρχιτεκτονικές.
Αντίθετα, αν και ο αυτόματος πιλότος είναι πλέον απαραίτητος για επιχειρησιακούς λόγους, η ύπαρξη του δεν είναι επιτακτική για ένα αεροσκάφος με σωστή πτητική συμπεριφορά, όπως αυτή μπορεί να διασφαλιστεί μέσω πρόσθετων SASs. Οι λειτουργίες του αυτόματου πιλότου είναι σχεδιασμένες με τέτοιο τρόπο ώστε να λειτουργούν μαζί με το επαυξημένο αεροσκάφος και να μπορούν να εμπλακούν κατά τη βούληση του πιλότου. Για τον λόγο αυτό, οι πίνακες ελέγχου των αυτομάτων πιλότων είναι κατασκευασμένοι με μεγαλύτερη λεπτομέρεια. Έτσι, είναι εφοδιασμένοι με κουμπιά και διακόπτες που επιτρέπουν στον πιλότο την εμπλοκή (engagement) και την απεμπλοκή των διαφόρων λειτουργιών. Επίσης, με την ύπαρξη κατάλληλων φωτεινών συμβόλων ο πιλότος παρακολουθεί τη σωστή λειτουργία του συστήματος κατά τη διάρκεια των αυτομάτων ελιγμών.
Στις διάφορες φάσεις της πτήσης ο πιλότος μπορεί να απεμπλέξει τον αυτόματο πιλότο. Σε αυτήν την περίπτωση, ο πιλότος θα αντιλαμβάνεται τα χαρακτηριστικά πτήσης και ευκολίας χειρισμού από τις κινήσεις του επαυξημένου αεροσκάφος. Έτσι, ο εσωτερικός βρόχος του συστήματος ελέγχου παρέχει τα μέσα με τα οποία όλες οι πλευρές της ευστάθειας, του ελέγχου και της ευκολίας χειρισμού μπορούν να ρυθμιστούν με τέτοιο τρόπο ώστε να βελτιωθούν τα χαρακτηριστικά του βασικού αεροσκάφους.
2. Αρχιτεκτονική Ηλεκτρονικών Συστημάτων Ελέγχου Πτήσης
Ανάλογα με το μέγεθος του αεροσκάφους, αλλά και το επίπεδο της τεχνολογικής εξέλιξής του, οι χειρισμοί των πιλότων μπορούν να εφαρμόζονται είτε απευθείας στις μηχανικές επιφάνειες ελέγχου (πηδάλια) είτε στους σερβομηχανισμούς των επενεργητών οδήγησης των πηδαλίων, προκειμένου να ενισχυθούν σε επίπεδο ισχύος ικανό να υπερνικήσει το επίπεδο των αεροδυναμικών δυνάμεων στις επιφάνειες ελέγχου. Σε πολλά όμως σύγχρονα και μεγάλου μεγέθους αεροσκάφη, οι χειρισμοί του πιλότου λαμβάνονται και εκτελούνται μέσω της ίδιας της ηλεκτρονικής μονάδας ελέγχου.
Στο σχήμα 8.2 φαίνεται η δομή ενός συστήματος επαύξησης της διαμήκους ευστάθειας με δυνατότητα παρέμβασης του χειριστή στον σερβομηχανισμό (επενεργητή) οδήγησης των πηδαλίων [8]. Αυτό το τυπικό σύστημα ανταποκρίνεται σε ένα αεροσκάφος με μηχανικά πηδάλια ελέγχου με τα οποία το EFCS συνδέεται διαμέσου σερβομηχανισμών, τεχνολογία που χρησιμοποιήθηκε στα αεροσκάφη του 1950-60. Στο σχήμα φαίνεται μόνο ο έλεγχος στον διαμήκη άξονα, αλλά όσα θα συζητηθούν ανταποκρίνονται και στους υπόλοιπους άξονες.
Ένα σύστημα αισθητηρίων (π.χ. δυναμοκυψέλες) μετρά τη δύναμη που ασκεί ο χειριστής στο χειριστήριο και την οδηγεί με τη μορφή ηλεκτρικού σήματος σε κατάλληλες συνιστώσες του EFCS. Το σήμα αυτό αποτελεί την εντολή ελέγχου για το σύστημα επαύξησης ευστάθειας, η οποία στη συγκεκριμένη περίπτωση είναι ο επιθυμητός ρυθμός περιστροφής, προκειμένου π.χ. το αεροσκάφος να εκτελέσει ένα ελιγμό ανόδου, όπως αυτός του σχ. 7.1. Ο πραγματικός ρυθμός περιστροφής και το σφάλμα στη γωνία πρόνευσης μετρούνται με κατάλληλα αισθητήρια (γυροσκόπια) και τροφοδοτούνται σαν ανάδραση στις υπόλοιπες συνιστώσες του EFCS, οι οποίες παράγουν με τη μορφή ηλεκτρικού σήματος κατάλληλη εντολή διόρθωσης της κλίσης των πηδαλίων.
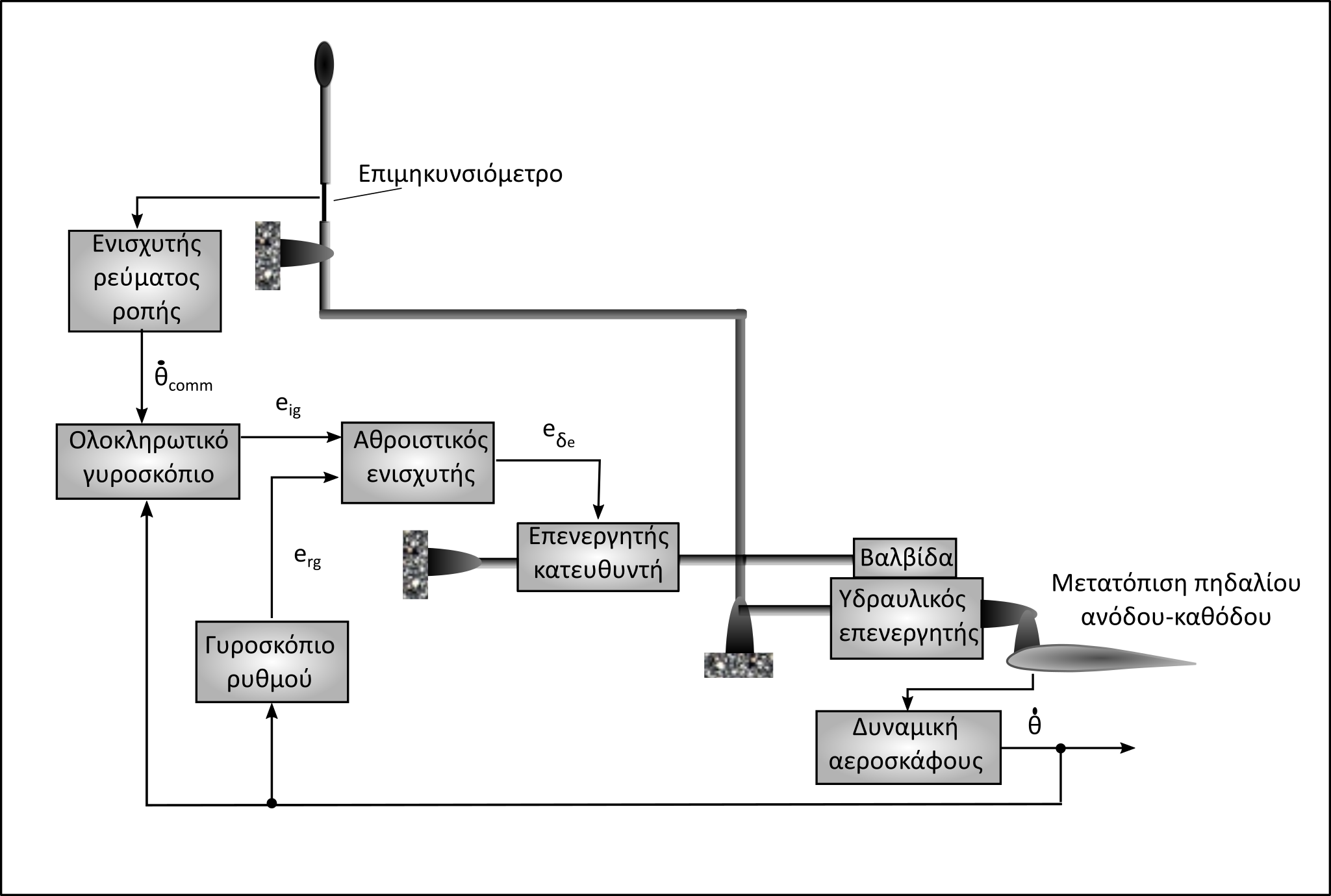
Σχήμα 8.2 Παράδειγμα αρχιτεκτονικής συστήματος ελέγχου πτήσης με παρέμβαση στο σερβομηχανισμό του πηδαλίου.
Το ηλεκτρικό αυτό σήμα οδηγείται στον επενεργητή, οποίος παρέχει τη διασύνδεση ανάμεσα στο ηλεκτρονικό σύστημα ελέγχου πτήσης και στα μηχανικά πηδάλια πτήσης, μετατρέποντας την ηλεκτρική εντολή ελέγχου σε κατάλληλη μετατόπιση των πηδαλίων.
Η πρώτη συνιστώσα του επενεργητή είναι ένας ηλεκτρο-υδραυλικός μηχανισμός (ηλεκτροβαλβίδα), η οποία μετατρέπει τα χαμηλής ισχύος ηλεκτρικά σήματα από το σύστημα EFCS σε μηχανικές μετατοπίσεις. Παράλληλα, στην ίδια μηχανική έξοδο αυτής της σερβοβαλβίδας υπερτίθενται και οι εντολές του πιλότου, οι οποίες λαμβάνονται μέσω της δύναμης που ασκεί ο χειριστής σε ένα χειριστήριο και μεταφέρονται μέσω ενός συστήματος μηχανικών μοχλών. Το επίπεδο ενίσχυσης του χαμηλής ισχύος του ηλεκτρικού σήματος από το EFCS σε μηχανική κίνηση είναι αντίστοιχο με το επίπεδο των εντολών ελέγχου που προέρχονται από τον χειριστή.
Η δεύτερη συνιστώσα του επενεργητή είναι μία υδραυλική σερβοβαλβίδα, η οποία ενισχύει τη συνισταμένη εντολή του EFCS και του χειριστή και τη μετατρέπει σε μηχανική μετατόπιση του πηδαλίου, παράγοντας επίπεδο δυνάμεων ικανό να υπερνικήσει το επίπεδο των αεροδυναμικών δυνάμεων στο πηδάλιο. Παράλληλα, λόγω του υδραυλικού ρευστού που περιέχει, η υδραυλική σερβοβαλβίδα ανθίσταται στις εντολές κίνησης, και κατά συνέπεια παρέχει στον πιλότο μια απευθείας φυσική αίσθηση (ανάδραση) της δύναμης ελέγχου που ασκεί στο πηδάλιο.
Η αλλαγή της κλίσης του πηδαλίου προσδίδει στο αεροσκάφος τον επιθυμητό ρυθμό περιστροφής. Προκειμένου το αεροσκάφος να διατηρεί ένα σταθερό ρυθμό περιστροφής, ο χειριστής πρέπει να ασκεί μια σταθερή δύναμη στο χειριστήριο. Το σύστημα μπορεί να προσαρμοσθεί, έτσι ώστε το επίπεδο δύναμης που ασκεί ο χειριστής ανά μονάδα g της επιτάχυνσης να είναι στα επιθυμητά όρια, τα οποία επιβάλουν οι απαιτήσεις της ποιότητας πτήσης και ευκολίας χειρισμών, όπως αυτές αναλύθηκαν στο κεφάλαιο 7 και εκφράζονται με τον ανηγμένο συντελεστή φόρτισης και την παράμετρο αναμενομένου ελέγχου (CAP).
Σε πολλά σύγχρονα αεροσκάφη, ολόκληρες οι συνιστώσες του μηχανικού ελέγχου πτήσης παραλείπονται και αντικαθίσταται από μια ηλεκτρική ή ηλεκτρονική διασύνδεση (link). Συστήματα αυτής της μορφής περιγράφονται με τον όρο «καλωδιωμένα συστήματα πτήσης» (Fly-By-wire systems - FBW systems), [3]. Μάλιστα, επειδή οι περισσότεροι υπολογιστές ελέγχου πτήσης είναι ψηφιακοί στηριζόμενοι σε οπτικές διατάξεις και η μετάδοση των σημάτων ελέγχου εμπλέκει και οπτικά μέσα (π.χ. οπτικές ίνες), τέτοια σύστημα ονομάζονται και «οπτικά συστήματα πτήσης» (Fly-By-Light - FBL).
Θα πρέπει όμως να σημειωθεί ότι οι λειτουργίες ελέγχου που επιτελούνται είναι ουσιαστικά ίδιες, είτε στα συστήματα FBW/FBL είτε στα απλά συστήματα επαύξησης της ευστάθειας που αντικαθιστούν. Πρέπει επομένως να υπογραμμισθεί ότι για ένα δεδομένο αεροσκάφος, οι λειτουργίες επαύξησης της ευστάθειας ή αυτόματων πιλότων που απαιτούνται από το σύστημα ελέγχου πτήσης είναι οι ίδιες, ανεξάρτητα από την αρχιτεκτονική που έχει χρησιμοποιηθεί κατά την εφαρμογή τους.
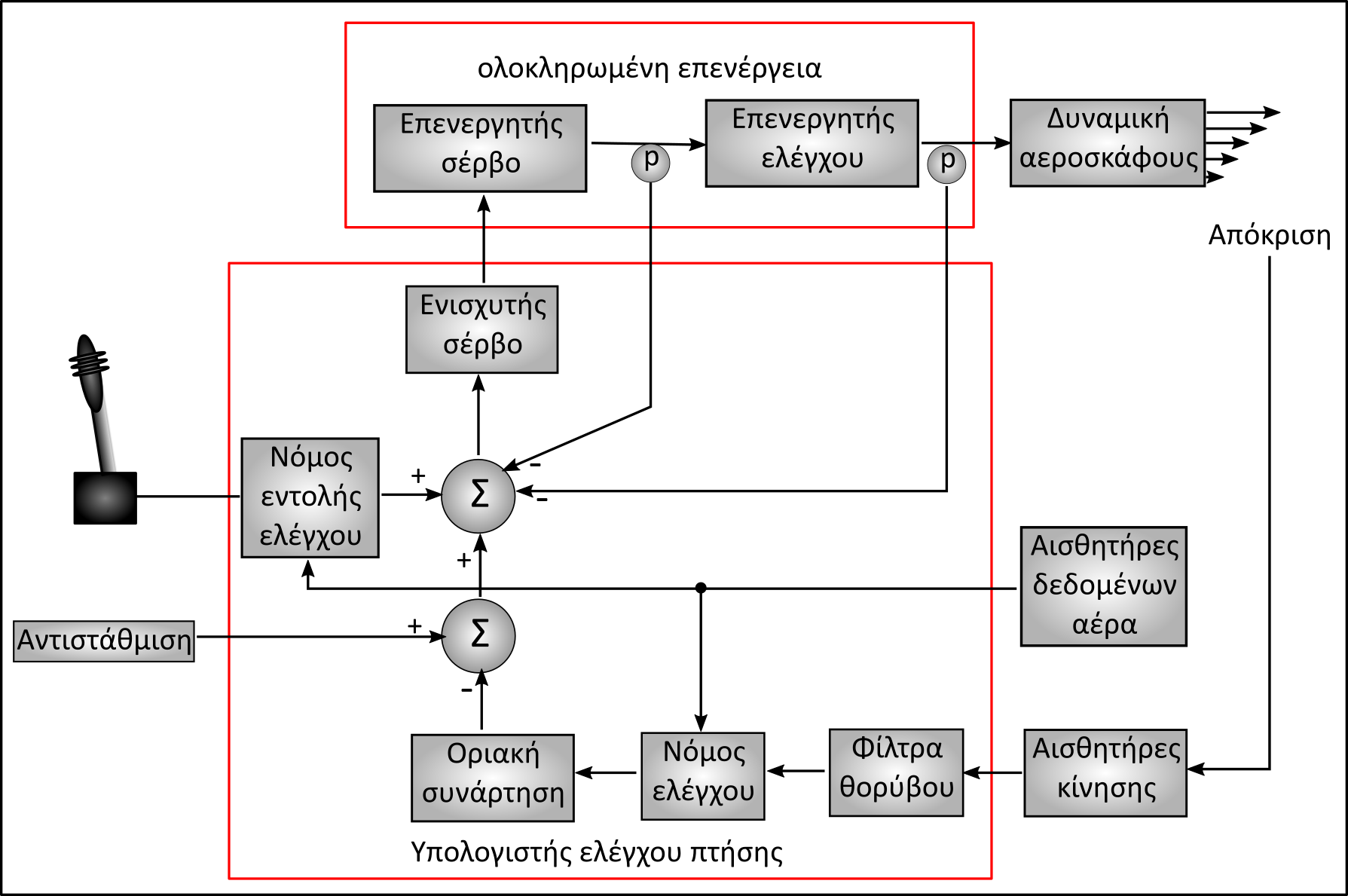
Σχήμα 8.3 Βασική αρχιτεκτονική συστήματος FBW.
Η βασική αρχιτεκτονική ενός συστήματος FBW/FBL φαίνεται στο σχήμα 8.3. Σε σύγκριση με το σχήμα 8.2, οι βασικές αλλαγές σχετίζονται με τον τρόπο παρέμβασης του χειριστή και τη δομή των επενεργητών. Καθώς τα μόνα μηχανικά στοιχεία στο FCS είναι οι διασυνδέσεις ανάμεσα στους επενεργητές και τις αεροδυναμικές επιφάνειες ελέγχου, ο ηλεκτροϋδραυλικός σερβομηχανισμός (ηλεκτροβαλβίδα) και η υδραυλική σερβοβαλβίδα είναι πολύ σύνηθες να αποτελούν μια και μόνο ενιαία μονάδα. Έτσι, το σήμα εισόδου είναι η ηλεκτρική εντολή ελέγχου από τον υπολογιστή ελέγχου πτήσης και το σήμα εξόδου είναι η απόκλιση της επιφάνειας ελέγχου. Το βασικό πλεονέκτημα ενός ολοκληρωμένου συστήματος επενεργητών είναι η σημαντική απλοποίηση του μηχανολογικού σχεδιασμού, καθώς οι βρόχοι ανάδρασης και ελέγχου κατά κύριο λόγο αποτελούνται από ηλεκτρικά σήματα παρά από ένα συνδυασμό ηλεκτρικών και μηχανικών σημάτων.
Η κύρια διαφορά του σχήματος 8.2 από το σχήμα 8.3 είναι ο μηχανισμός φυσικής αίσθησης (ανάδρασης) της δύναμης ελέγχου που ασκεί ο χειριστής στο πηδάλιο. Καθώς η μηχανική διασύνδεση ανάμεσα στον πιλότο και στις επιφάνειες ελέγχου έχει διακοπεί στο σχ. 8.3, η αίσθηση ελέγχου του αεροσκάφους προφανώς δεν έχει άμεση σχέση με τα αεροδυναμικά φορτία των επιφανειών ελέγχου. Για το λόγο αυτό χρησιμοποιείται ένα πρόσθετο σύστημα αίσθησης, το οποίο μπορεί να αποτελείται από ένα απλό μη γραμμικό ελατήριο. Πιο συχνά είναι μια ηλεκτροϋδραυλική συσκευή που αναφέρεται ως “Q-feel system”, καθώς τα χαρακτηριστικά της σχεδιάζονται με βάση τη μεταβολή της δυναμικής πίεσης Q. Ο προσεχτικός σχεδιασμός του συστήματος αίσθησης, επιτρέπει την ανεξάρτητη από τις άλλες σχετιζόμενες παραμέτρους ευστάθειας, ρύθμιση του περιθωρίου ευστάθειας ελιγμών με τα χειριστήρια ελεύθερα.
Όπως φαίνεται και στο σχ. 8.3, τα συστήματα FBW μπορούν να συμπεριλάβουν και τη λειτουργία της αντιστάθμισης με ηλεκτρικό τρόπο, καθώς τα περισσότερα αεροσκάφη που είναι εφοδιασμένα με σύγχρονης τεχνολογίας FCS δεν διαθέτουν μηχανικούς τρόπους αντιστάθμισης. Ο ρόλος της λειτουργίας αυτής είναι να θέτει την τιμή αναφοράς του σήματος ελέγχου -ουσιαστικά τη γωνία απόκλισης της επιφάνειας ελέγχου- σε εκείνη την τιμή που απαιτείται ώστε να διατηρηθούν οι συνθήκες ισορροπίας πτήσης που έχουν επιλεγεί. Η ακριβής λειτουργία που τελικά θα χρησιμοποιηθεί εξαρτάται από τον τύπο της εφαρμογής και σε μερικές περιπτώσεις μπορεί να εφαρμοστεί ένα ολοκληρωμένο και πλήρες αυτόματο σύστημα αντιστάθμισης. Σε αυτή την περίπτωση δεν απαιτείται ούτε καν σύστημα που θα προορίζεται για τον πιλότο, καθώς όλες οι διαδικασίες είναι αυτοματοποιημένες.
Στο σχήμα 8.3 εικονίζονται και μερικές άλλες βασικές συνιστώσες ενός συστήματος EFCS. Τα φίλτρα θορύβου π.χ. χρησιμεύουν ώστε να απομακρύνουν περιττές πληροφορίες από τα σήματα εξόδου των αισθητήρων. Στην καλύτερη των περιπτώσεων, ο θόρυβος μπορεί να προκαλέσει άχρηστες κινήσεις των επιφανειών ελέγχου και στη χειρότερη των περιπτώσεων μπορεί να προκαλέσει μη επιθυμητή κίνηση του αεροσκάφους. Κάποιες φορές λόγω του ότι οι αισθητήρες τοποθετούνται σε σημεία του αεροσκάφους που καταπονούνται δομικά, ο θόρυβος προκύπτει από τη φυσιολογική παραμόρφωση που υφίσταται η δομή του αεροσκάφους. Έτσι, δημιουργείται ένας μη επιθυμητός δομικός βρόχος ανάδρασης. Η λύση στο παραπάνω πρόβλημα περιλαμβάνει φιλτράρισμα στενού εύρους ώστε να αποκοπούν τα σήματα εξόδου των αισθητήρων στις κρίσιμες συχνότητες παραμόρφωσης της δομής του αεροσκάφους.
Επιπλέον, ένα EFCS παρέχει τη δυνατότητα απλής και συνεχούς προσαρμογής των παραμέτρων των ρυθμιστών στη μεταβολή των συνθηκών πτήσης. Αυτή η δυνατότητα έχει μεγάλη σημασία, καθώς για τα περισσότερα αεροσκάφη τα απαιτούμενα κέρδη του νόμου ελέγχου τα οποία παρέχουν καλή ευστάθεια, έλεγχο και χαρακτηριστικά ευκολίας χειρισμού μεταβάλλονται με τις συνθήκες πτήσης, και είναι απαραίτητο να βρεθεί τρόπος ώστε να επιτυγχάνεται η συνεχής ρύθμισή τους. Οι μεταβολές των συνθηκών πτήσης πολλές φορές προκύπτουν ως αποτέλεσμα των αλλαγών που συμβαίνουν στις αεροδυναμικές ιδιότητες του σκάφους σε όλη την έκταση του φακέλου πτήσης. Για παράδειγμα, σε χαμηλές ταχύτητες η αεροδυναμική αποτελεσματικότητα των επιφανειών ελέγχου είναι γενικά μικρότερη σε σχέση με τις μεγαλύτερες ταχύτητες. Αυτό σημαίνει ότι απαιτούνται μεγαλύτερα κέρδη ελέγχου στις χαμηλές ταχύτητες και το αντίστροφο. Αποτελεί κοινή πρακτική να μεταβάλλονται τα κέρδη σε συνάρτηση με τις συνθήκες πτήσης. Οι κοινά χρησιμοποιούμενες μεταβλητές των συνθηκών πτήσης που χρησιμοποιούνται για αυτόν τον σκοπό είναι η δυναμική πίεση, ο αριθμός Mach, το ύψος κλπ. Όλες αυτές οι πληροφορίες ομαδοποιούνται με τον όρο «ατμοσφαιρικά δεδομένα» (air data) και αποτελούν επίσης στοιχεία που συλλέγει και επεξεργάζεται ένα EFCS.
Η ασφάλεια των πτήσεων αποτελεί το μεγαλύτερο ίσως θέμα προς εξέταση σε ένα αεροσκάφος που είναι εφοδιασμένο με σύστημα ελέγχου πτήσης. Εφόσον το EFCS έχει άμεση πρόσβαση στις επιφάνειες ελέγχου, θεωρείται δεδομένο ότι έχει δοθεί ιδιαίτερη προσοχή κατά τον σχεδιασμό ώστε σε καμιά περίπτωση να μην δοθεί κάποια ανεξέλεγκτη εντολή από αυτό.
Για παράδειγμα, εάν συνέβαινε αστοχία ενός αισθητήρα, το σήμα εξόδου του θα μπορούσε να φτάσει στη μέγιστη δυνατή τιμή του. Τότε, δια μέσου του νόμου ελέγχου του συστήματος θα μπορούσε να προκληθεί μια μέγιστη απόκλιση των επιφανειών ελέγχου και στη συνέχεια μια αποκλίνουσα απόκριση από το ίδιο το αεροσκάφος. Αυτό που φροντίζει επομένως καταρχήν ο σχεδιαστής του συστήματος δεν είναι τίποτα άλλο από την τοποθέτηση μηχανισμών ώστε να προστατευτεί το ίδιο το αεροσκάφος από τη μερική ή και την ολική αστοχία κάποιων υποσυστημάτων του FCS.
Άλλα προβλήματα ασφάλειας, όπως π.χ. η περίπτωση αστοχίας κάποιου εξαρτήματος λύνονται με περιορισμό της μέγιστης τιμής που μπορεί να λάβει το σήμα ελέγχου, κάτι που ονομάζεται σύστημα ελέγχου με περιορισμούς (limited authority control system). Περιοριστές εύρους κίνησης (amplitude limiters) τοποθετούνται στον ίδιο τον επενεργητή, ή/και στον υπολογιστή ελέγχου πτήσης.
Σε πιο πολύπλοκα FCS εκεί όπου ο περιορισμός δεν είναι αποδεκτός για λόγους ελέγχου του αεροσκάφους, είναι απαραίτητη η χρήση παραλλήλων και εφεδρικών συστημάτων (redundancy). Αυτά τα FCS αποτελούνται από δύο ή περισσότερα παρόμοια λειτουργικά συστήματα, καθένα από τα οποία λειτουργεί πλήρως και με παράλληλη συνδεσμολογία, ανεξάρτητα από τα υπόλοιπα συστήματα, ενώ η λειτουργία τους επιτηρείται και συγκρίνεται. Σε περίπτωση αστοχίας ενός συστήματος, αυτό απομονώνεται αφήνοντας τα υπόλοιπα σε λειτουργία, διαδικασία που πραγματοποιείται αυτόματα και σε ελάχιστο χρόνο. Ο πιλότος στη συνέχεια ειδοποιείται από το σύστημα ενδείξεων για τη βλάβη, ώστε να απομονώσει και να αντικαταστήσει το προβληματικό σύστημα.
3. Τύποι και νόμοι ελέγχου συστημάτων επαύξησης ευστάθειας
Ο αντικειμενικός σκοπός ενός συστήματος SAS είναι να εφοδιαστεί το αεροσκάφος με καλά χαρακτηριστικά ευστάθειας, ελέγχου και ευκολίας χειρισμού σε ολόκληρο τον φάκελο πτήσης του. Αυτό επιτυγχάνεται τροποποιώντας μέσω συστημάτων ανάδρασης τις φυσικές συχνότητες και τους λόγους απόσβεσης που χαρακτηρίζουν τα φαινόμενα δυναμικής πτήσης. Σαν αποτέλεσμα, το SAS ελαχιστοποιεί τα μεταβατικά της απόκρισης που ακολουθούν μετά από μια μεταβολή από την κατάσταση ισορροπίας.
Όταν το σύστημα λειτουργεί σωστά κατά τη διάρκεια της πτήσης χωρίς ελιγμούς, οι μεταβλητές απόκρισης θα παίρνουν μηδενικές τιμές ή τιμές πολύ κοντά στην τιμή αυτή αφού η δράση του αρνητικού βρόχου ανάδρασης είναι να οδηγεί την τιμή του σφάλματος στο μηδέν. Επομένως το SAS δεν απαιτεί μεγάλου εύρους κίνηση των πηδαλίων ελέγχου, με τις σχετικές τιμές να κυμαίνονται στο ±10% της συνολικής δυνατότητας κίνησης της επιφάνειας αεροδυναμικού ελέγχου. Τυπικές μορφές SASs όπως καταγράφονται από τους McLean [7] και Nelson [5], παρουσιάζονται στη συνέχεια.
3.1. Αύξηση διαμήκους ευστάθειας και απόσβεσης πρόνευσης
Η απόσβεση της μικρής περιόδου για τα αεροσκάφη υψηλών επιδόσεων τείνει να επιδεινωθεί με πολύ ταχύ ρυθμό σε χαμηλές ταχύτητες και σε μεγάλα ύψη (δηλ. σε χαμηλή δυναμική πίεση). Για να μπορέσει να αυξηθεί η ευελιξία των αεροσκαφών υψηλών επιδόσεων, έχει πλέον γίνει ευρέως αποδεκτό ότι μπορεί να ελαττωθεί η στατική διαμήκη ευστάθειας.
Για την περίπτωση της διαμήκους ευστάθειας αυτή τη στιγμή πολλά αεροσκάφη σχεδιάζονται με αρνητικά στατικά περιθώρια. Με σκοπό τα αεροσκάφη αυτά να δίνουν την αίσθηση στον πιλότο ότι αποκρίνονται σαν κλασσικά αεροσκάφη, απαιτείται κάποιου είδους επαύξηση της ευστάθειας.
Ακόμη και αν ένα αεροσκάφος είναι σχεδιασμένο στατικά ευσταθές, υπό συγκεκριμένες συνθήκες πτήσης προκαλούνται έντονες μεταβολές στη διαμήκη ευστάθεια, ειδικά σε αεροσκάφη υψηλών επιδόσεων σε υπερηχητική πτήση ή σε μεγάλες γωνίες πρόσπτωσης (φαινόμενο “pitch up”). Η καμπύλη του συντελεστή ροπής πρόνευσης συναρτήσει της γωνίας πρόσπτωσης ενός αεροσκάφους που υπόκειται σε αυτό το φαινόμενο, έχει τη μορφή του σχήματος 8.4.
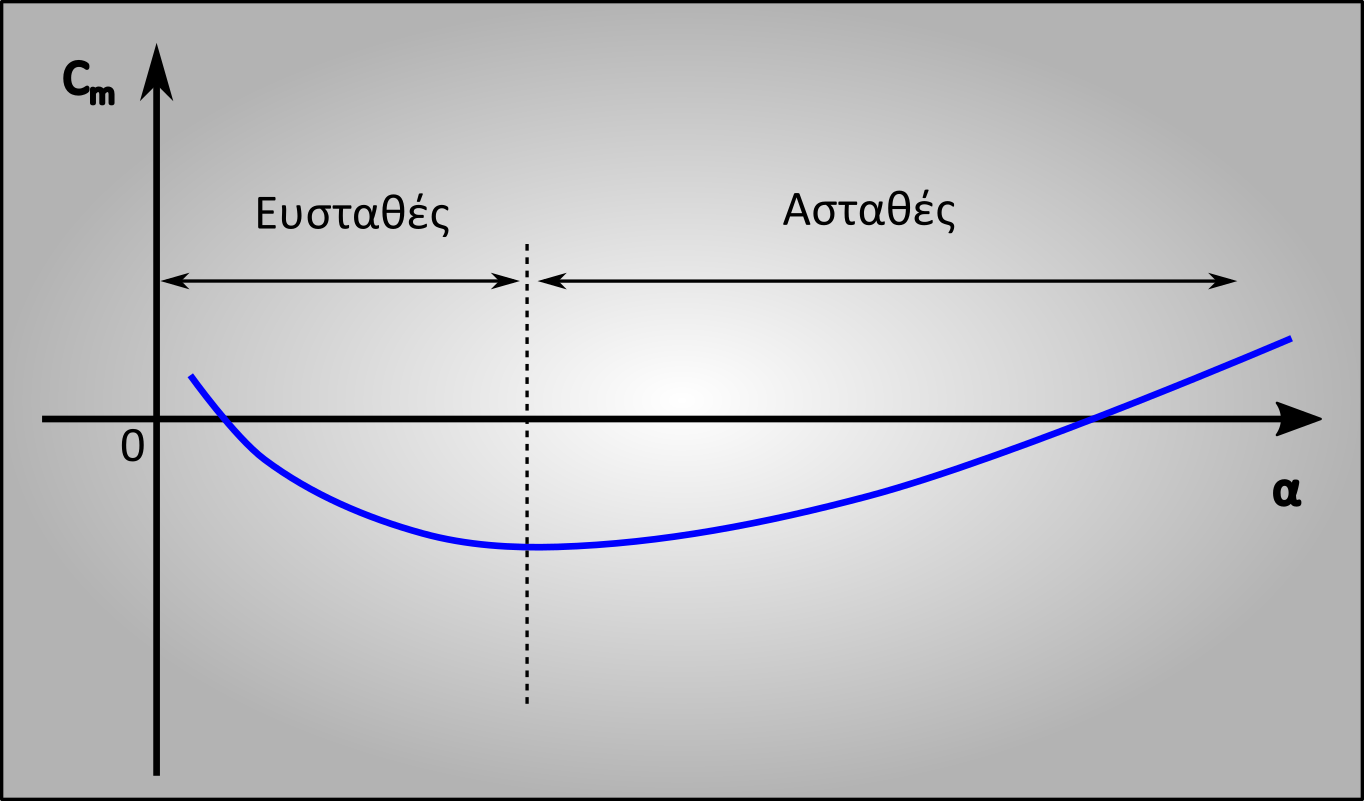
Σχήμα 8.4 Ασταθής διαμήκης ισορροπία με αύξηση της γωνίας πρόσπτωσης.
Εφόσον η κλίση της καμπύλης γίνεται αρνητική συνεπάγεται αστάθεια, οπότε πρέπει να γίνουν διορθωτικές ενέργειες. Η αλλαγή από ευσταθές σε ασταθές, μπορεί να γίνει ταχύτατα με αποτέλεσμα ο πιλότος να μην δύναται να ελέγξει το φαινόμενο.
Μία πρακτική λύση του προβλήματος, είναι ο περιορισμός της γωνίας πρόσπτωσης στην οποία πετά το αεροσκάφος. Αυτό βέβαια περιορίζει και την απόδοση του. Για τον λόγο αυτό σχεδιάζονται αυτόματα συστήματα ελέγχου της πρόνευσης ώστε να είναι δυνατή η πτήση σε μεγαλύτερο εύρος γωνιών πρόσπτωσης και συνεπώς λιγότερους περιορισμούς στην απόδοση του αεροσκάφους.
3.1.1. Ανάδραση ρυθμού πρόνευσης
Συνήθως, η αύξηση της διαμήκους ευστάθειας και της απόσβεσης μικρής περιόδου επιτυγχάνεται με την ανάδραση του ρυθμού πρόνευσης στο πηδάλιο ανόδου καθόδου όπως παρουσιάζεται στο δομικό διάγραμμα του σχήματος 8.5.
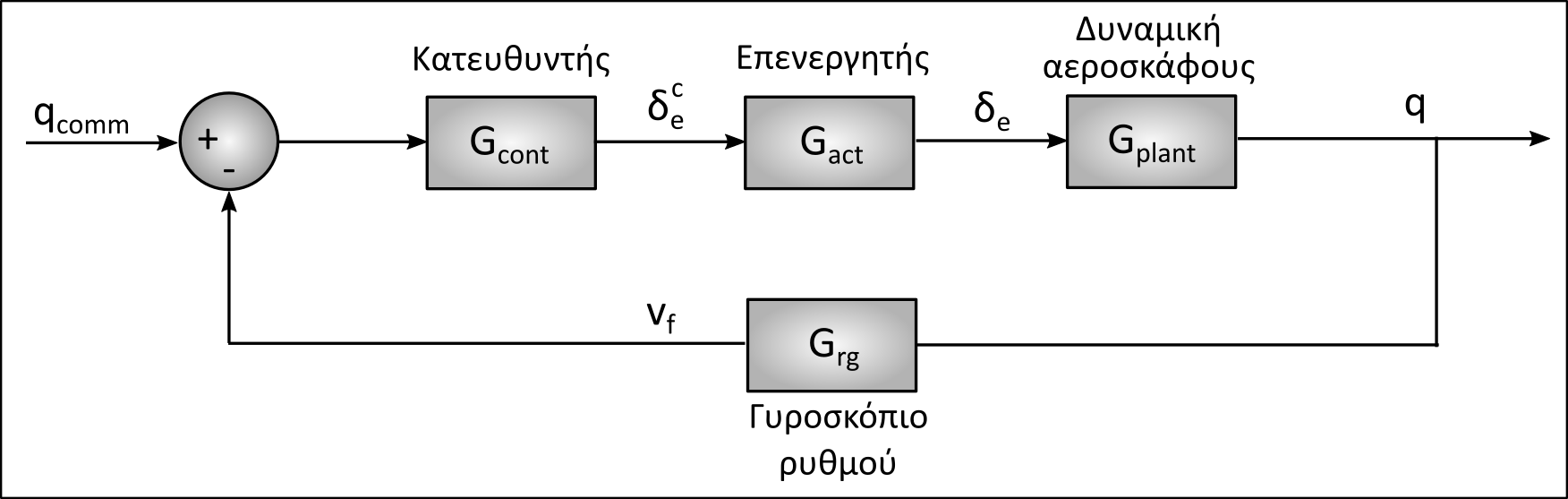
Σχήμα 8.5 Απόσβεση πρόνευσης με ανάδραση του ρυθμού πρόνευσης στο πηδάλιο ανόδου-καθόδου
Η συνάρτηση μεταφοράς της δυναμικής του αεροσκάφους μπορεί να προσεγγισθεί με πολύ ικανοποιητική ακρίβεια από τη δυναμική μικρής περιόδου, όπως αυτή περιγράφεται μεταξύ άλλων και από την εξίσωση (7.15).
Για τη μέτρηση και ανάδραση του ρυθμού πρόνευσης, χρησιμοποιείται γυροσκόπιο ρυθμού περιστροφής (rate gyro). Το εύρος ζώνης και η απόσβεση τoυ, όπως και όλων των αισθητήρων του συστήματος ελέγχου πτήσης, επιλέγονται κατά βάση, έτσι ώστε να μην υπεισέρχεται κάποια αξιοσημείωτη χρονική καθυστέρηση μεταξύ της εισόδου και του σήματος απόκρισης. Παρόλο που τα αδρανειακά αισθητήρια όπως τα γυροσκόπια και επιταχυνσιόμετρα, έχουν πολύ καλά καθορισμένη δυναμική περιγραφή, γενικά η ευαισθησία των αισθητήρων, περιγράφεται από προσεγγιστικές ΣΜ της μορφής:
|
|
|
(8.1) |
όπου
• y: κινηματική μεταβλητή - είσοδος,
• vf: ηλεκτρικό σήμα εξόδου,
• Κ: κέρδος ([Volt/rad] ή [Volt/rad/sec] στα γυροσκόπια και [Volt/m/s2] ή [Volt/g] στα επιταχυνσιόμετρα).
Σημειώνεται ότι λόγω της σημειολογίας που καθιερώθηκε εξαρχής, ο ρυθμός πρόνευσης q έχει αντίθετο πρόσημο από τη γωνία δe του πηδαλίου ανόδου-καθόδου. Εφόσον ο επιθυμητός ρυθμός πρόνευσης qcomm εισάγεται ως ομόσημος με τη δe, το σήμα vf του γυροσκοπίου προστίθεται με το qcomm στον αθροιστή του κυκλώματος και το σήμα οδηγείται στον ρυθμιστή (controller).
Στην απλούστερη περίπτωση, ο ρυθμιστής μπορεί να είναι ένας απλός αναλογικός ελεγκτής (κατευθυντής) «P» (Proportional), με μία σταθερά κέρδους Κcont. Αφού καθοριστεί ένα κατάλληλο επιθυμητό ζεύγος φυσικής συχνότητας ωs και απόσβεσης ζs, χρησιμοποιώντας κάποια από τις μεθόδους που αναπτύσσονται στο παράρτημα Β, επιδιώκεται ο υπολογισμός των κερδών του κατευθυντή ώστε να προκύπτουν τα επιθυμητά δυναμικά χαρακτηριστικά.
Για τους επενεργητές [7], μεσολαβεί μια χρονική καθυστέρηση μεταξύ της εντολής εισόδου και της απόκρισης, λόγω της αδράνειας των μηχανικών και των υδραυλικών μελών του. Για μικρά αεροσκάφη, αυτή μπορεί να αμεληθεί. Στις πλείστες όμως περιπτώσεις και ειδικά για μεγάλα αεροσκάφη, όπου οι απαιτούμενες ροπές για την οδήγηση των επιφανειών ελέγχου είναι μεγάλες, η χρονική καθυστέρηση δεν μπορεί να αμεληθεί, οπότε η πιο κοινή περιγραφή της δυναμικής του επενεργητή, δίνεται από την παρακάτω συνάρτηση μεταφοράς ως:
|
|
|
(8.2) |
όπου λ=1/Τ=5:10 [1/sec] είναι η αντίστροφη χρονική σταθερά του επενεργητή.
Με στόχο την περαιτέρω αύξηση της απόσβεσης της μικρής περιόδου ζs, μπορούν να χρησιμοποιηθούν αντισταθμιστές προπορευόμενης/υπολειπόμενης φάσης, τυπικά διαγράμματα των οποίων παρουσιάζονται στο σχήμα 8.6.
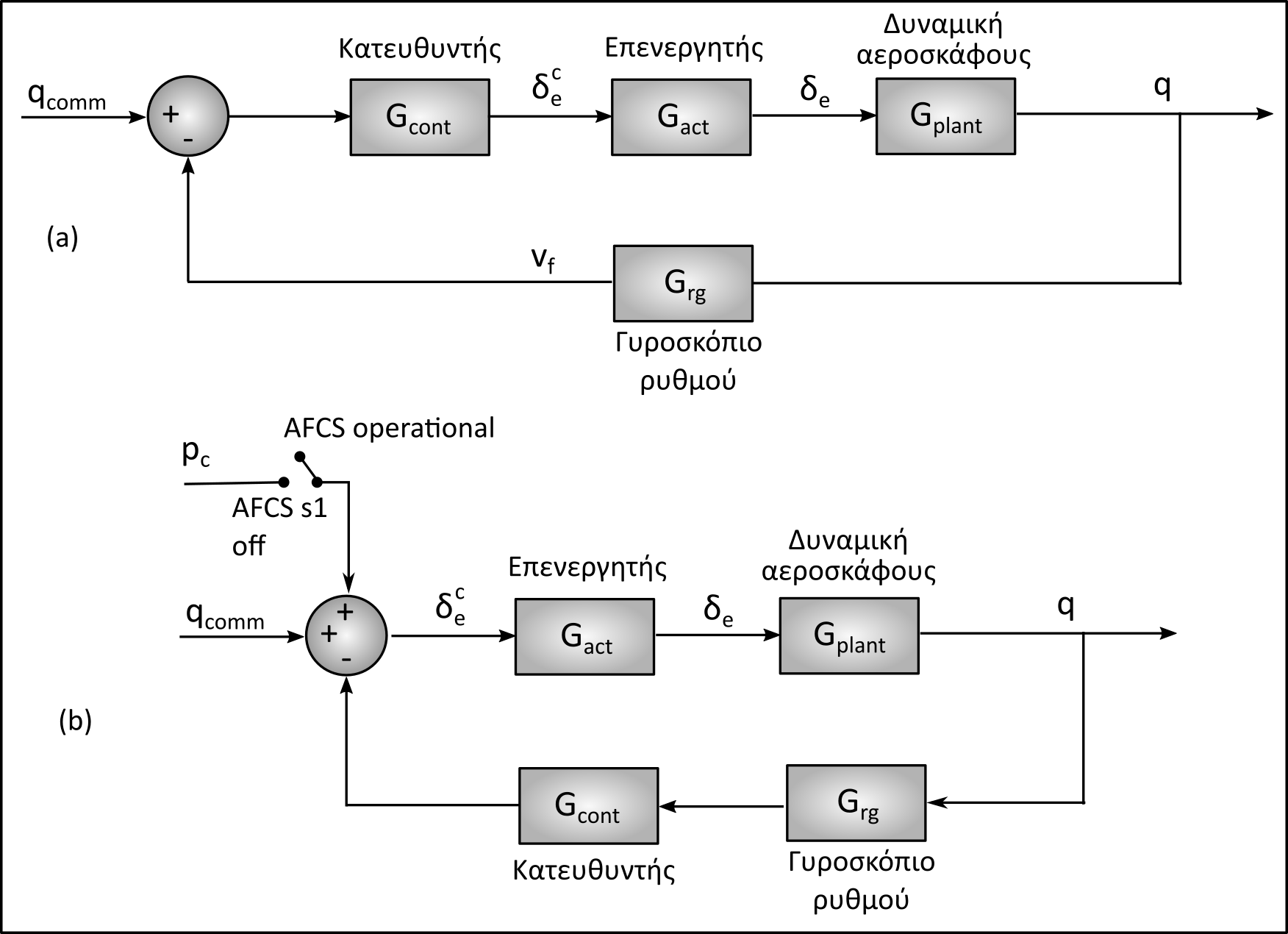
Σχήμα 8.6 Απόσβεση πρόνευσης με ανάδραση του ρυθμού πρόνευσης στο πηδάλιο ανόδου-καθόδου και αντισταθμιστές προπορευόμενης/υπολειπόμενης φάσης.(a) Σειριακή σύνδεση (b) Κατευθυντής στην ανάδραση
Σε αυτή την περίπτωση, η συνάρτηση μεταφοράς των αντισταθμιστών είναι:
|
|
|
(8.3) |
όπου
|
|
|
(8.4) |
Παρά το γεγονός όμως ότι η απόσβεση μικρής περιόδου ζs, αυξάνεται, μειώνεται η φυσική συχνότητα χωρίς απόσβεση ωs, ιδιαίτερα όταν το γυροσκόπιο εισάγει έντονο θόρυβο.
Παράδειγμα 8.1.
Το σύστημα επαύξησης της διαμήκους ευστάθειας και της απόσβεσης της μικρής περιόδου με ανάδραση του ρυθμού πρόνευσης q, έχει τη μορφή του σχήματος 8.5. Χρησιμοποιώντας τα δεδομένα για τις παραγώγους ευστάθειας του αεροσκάφους Boeing 747-100 (παράρτημα Η.1, 3η περίπτωση), η συνάρτηση μεταφοράς του ρυθμού πρόνευσης ως προς το πηδάλιο ανόδου-καθόδου, όπως προκύπτει από την προσέγγιση της ταλάντωσης της μικρής περιόδου είναι:
|
|
|
(8.5) |
Οι πόλοι της χαρακτηριστικής εξίσωσης και ο μηδενιστής είναι:
|
|
|
|
Όπως αναφέρθηκε αρχικά στο 7ο κεφάλαιο, για τον καθορισμό ικανοποιητικών χαρακτηριστικών πτήσης και ευκολίας χειρισμού, λαμβάνονται υπόψη εμπειρικά δεδομένα όπως το διάγραμμα αποτυπώματος του αντίχειρα (Σχήμα 7.2).
Για τα χαρακτηριστικά της μικρής περιόδου, ένα ικανοποιητικό ζεύγος τιμών όπως προκύπτει από το διάγραμμα, είναι:
|
|
|
|
Εφόσον, η χαρακτηριστική εξίσωση είναι της μορφής s2+2ζωns+ωn, τα χαρακτηριστικά αυτά αντιστοιχούν στους κυρίαρχους συζυγείς μιγαδικούς πόλους:
|
|
|
|
Αρχικά θεωρείται αναλογικός κατευθυντής «P» που είναι ένα απλό κέρδος:
|
|
|
(8.6) |
Επίσης, μία σημαντική υπενθύμιση: Η πρόνευση θ και ο ρυθμός πρόνευσης q, ορίστηκαν εξαρχής στο παρόν σύγγραμμα ως θετικά όταν η γωνία μετατόπισης του πηδαλίου ανόδου-καθόδου είναι αρνητική.
Για να ληφθεί υπόψη η χρονική καθυστέρηση του επενεργητή του πηδαλίου ανόδου-καθόδου, η δυναμική του περιγράφεται από τη σΜ:
|
|
|
(8.7) |
Ο ρυθμός πρόνευσης q της ανάδρασης, μετράται με το γυροσκόπιο ρυθμού, το οποίο παρίσταται ως ένα απλό κέρδος:
|
|
|
(8.8) |
Γενικά υποτίθεται ότι το κέρδος του γυροσκοπίου, είναι δεδομένο, θετικό και σταθερό, οπότε η τοποθέτηση των πόλων στις επιθυμητές θέσεις μπορεί να γίνει με την επιλογή του κατάλληλου κέρδους και του τύπου του κατευθυντή.
Η ΣΜ της εγκατάστασης είναι:
|
|
|
(8.9) |
Τότε ο τόπος των ριζών, έχει τη μορφή του σχήματος Π8.1.1:
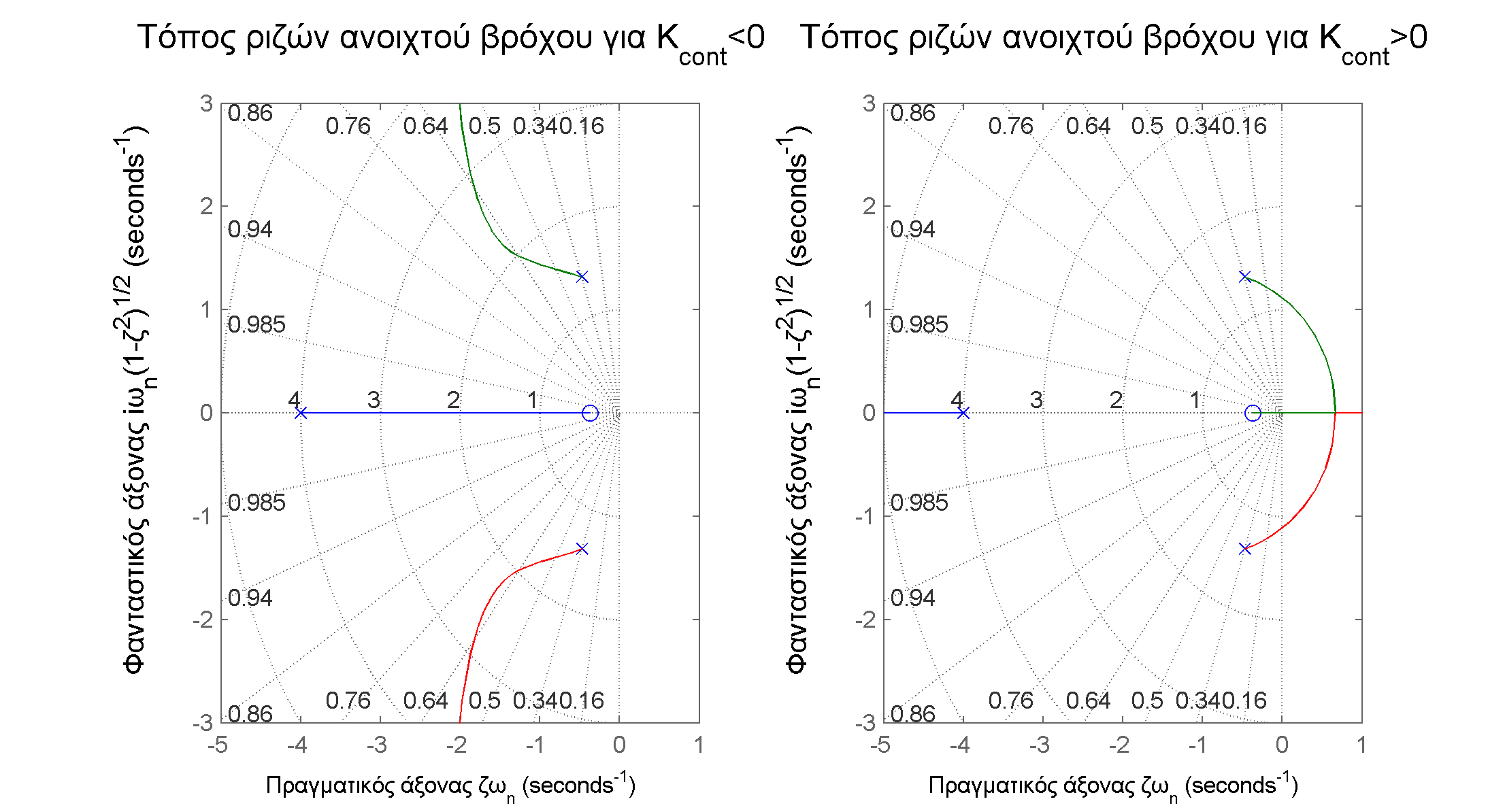
Σχήμα Π8.1.1 Τόπος ριζών του συστήματος επαύξησης της διαμήκους ευστάθειας με ανάδραση του ρυθμού πρόνευσης q.
Προφανώς, από το σχήμα Π8.1.1, προκύπτει ότι για να είναι ευσταθές το σύστημα, το κέρδος του κατευθυντή πρέπει να είναι αρνητικό.
Στο σχήμα Π8.1.2, παρουσιάζονται οι θέσεις των πόλων και του μηδενιστή της εγκατάστασης και του επενεργητή, το πως μετατοπίζονται εισάγοντας τον βρόχο ανάδρασης και μεταβάλλοντας το κέρδος του κατευθυντή [10]. Οι κίτρινοι κύκλοι δείχνουν την περιοχή που πρέπει να μετατοπισθούν οι πόλοι, ώστε να επιτευχθούν τα επιθυμητά χαρακτηριστικά της μικρής περιόδου.
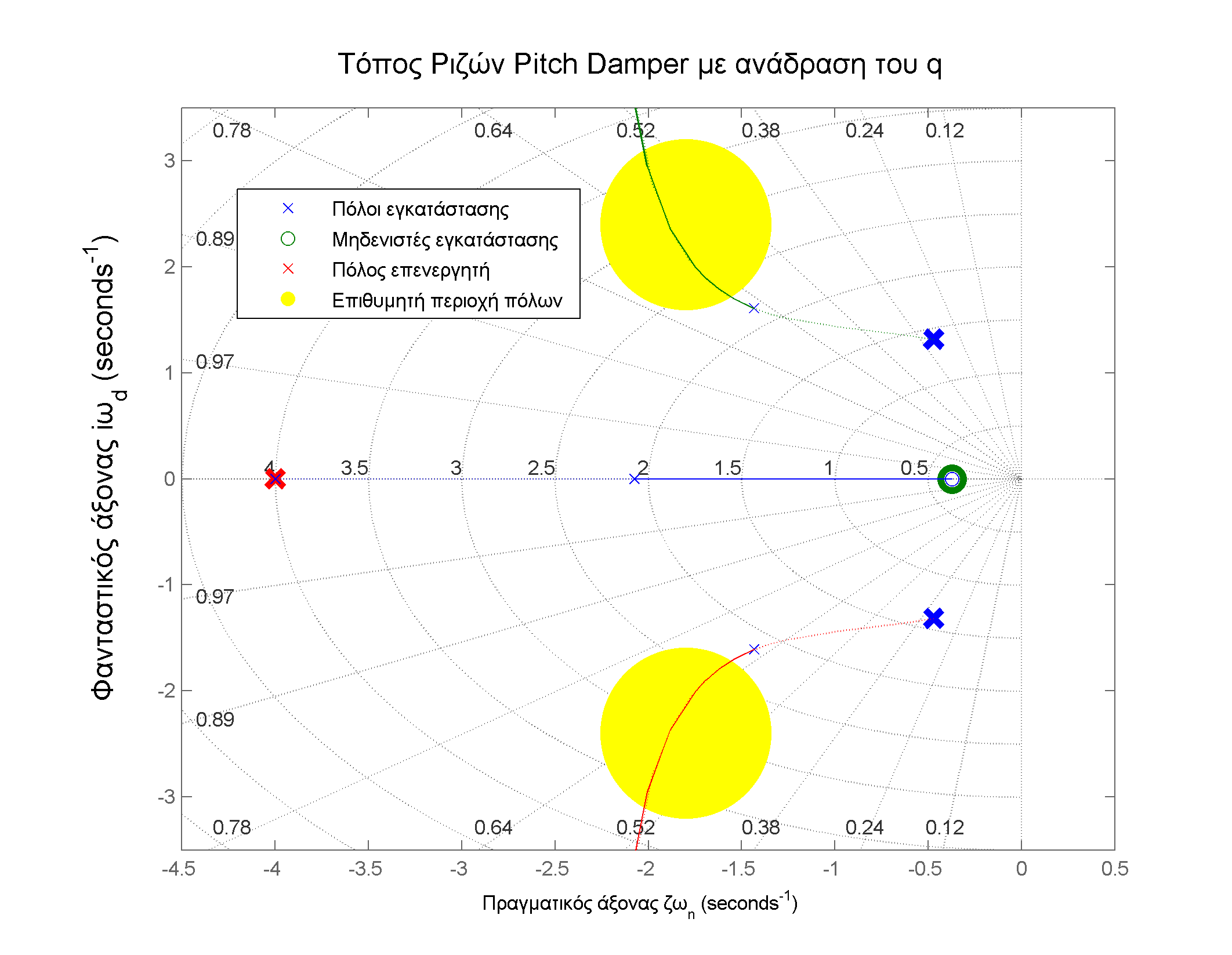
Σχήμα Π8.1.2 Τόπος ριζών του συστήματος επαύξησης της διαμήκους ευστάθειας με ανάδραση του ρυθμού πρόνευσης q.
Παραπέμποντας στο παράρτημα Β.2.3, η ΣΜ του κλειστού βρόχου, γράφεται στη μορφή:
|
|
|
(8.10) |
Η χαρακτηριστική εξίσωση προκύπτει ως:
|
|
|
(8.11) |
Ενώ η απόκριση του ρυθμού πρόνευσης σε εντολή εισόδου qcomm μοναδιαίας βαθμίδας, είναι αυτή του σχήματος Π8.1.3:
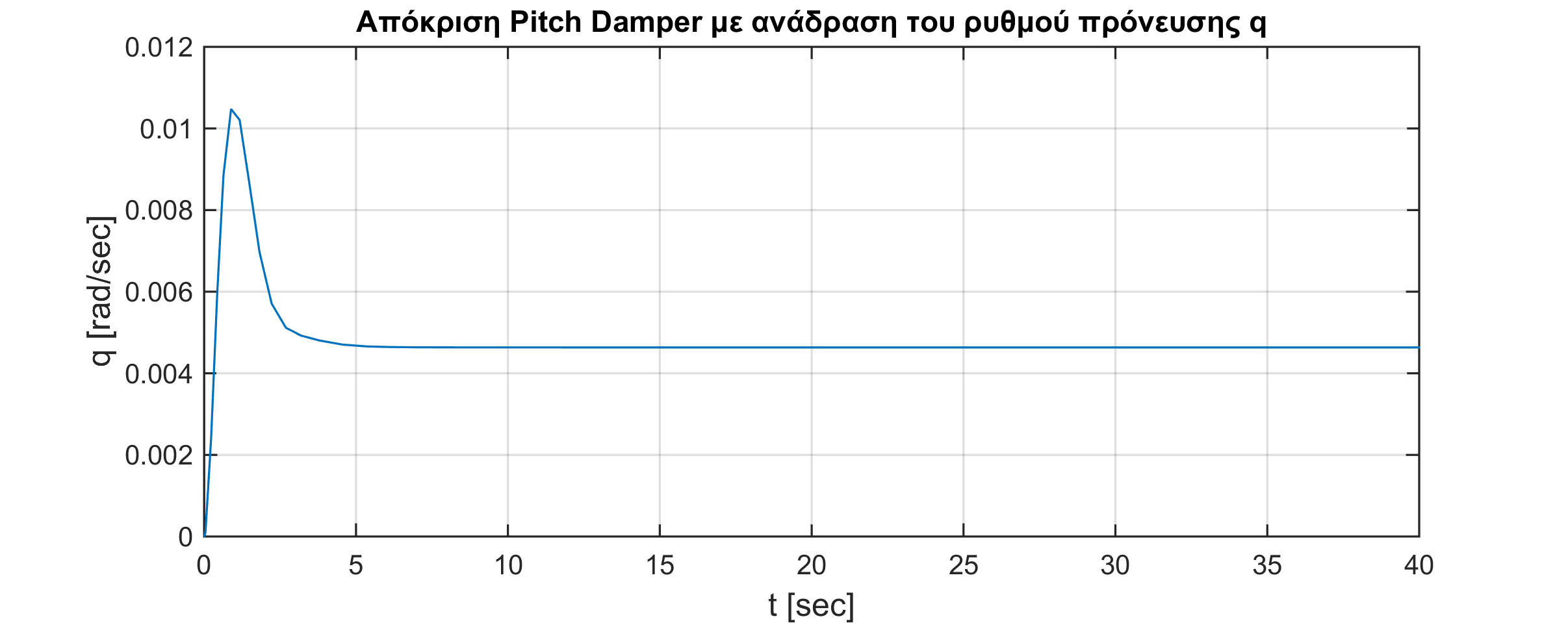
Σχήμα Π8.1.3 Απόκριση ρυθμού πρόνευσης q σε είσοδο μοναδιαίας βαθμίδας του πηδαλίου ανόδου-καθόδου.
Θέτοντας Κ=ΚcontKq και επιλύοντας τη χαρακτηριστική εξίσωση, προκύπτει:
|
|
|
(8.12) |

Η επιθυμητή χαρακτηριστική εξίσωση που έχει τους πόλους που προαναφέρθηκαν και συνάδουν με τα απαιτούμενα χαρακτηριστικά πτήσης και ευκολίας χειρισμού, προκύπτει ως εξής:
|
|
|
(8.13) |
Επιχειρώντας την εξίσωση των συντελεστών της (8.12) με της επιθυμητής χαρακτηριστικής (8.13), είναι προφανής η αδυναμία μετακίνησης των πόλων ακριβώς στις επιθυμητές θέσεις με ένα αναλογικό “P” κατευθυντή. Για ακριβή έλεγχο απαιτείται η προσθήκη ενός αναλογικού-διαφορικού (“PD”-Proportional-Derivative) κατευθυντή:
|
|
|
(8.14) |
Αντί αυτού, σχεδιάζεται ένα άλλο σύστημα, το οποίο συνδυάζει την ανάδραση της πρόνευσης θ και του ρυθμού πρόνευσης q, το οποίο ομοιάζει με μια “PD” σύνδεση. Το σύστημα αυτό εμπίπτει στους βασικούς διαμήκεις αυτόματους πιλότους και μελετάται εκτεταμένα στη συνέχεια, στο υποκεφάλαιο 4 και στο παράδειγμα 8.4.
3.1.2. SAS επαύξησης της στατικής ευστάθειας
Στο υποκεφάλαιο 3.5 του κεφαλαίου 2 ορίστηκε η έννοια των στατικών περιθωρίων ευστάθειας. Ευρύ στατικό περιθώριο συνεπάγεται τη δυνατότητα βελτίωσης της συμπεριφοράς του αεροσκάφους κατά τους ελιγμούς λόγω της μεταβολής του φορτίου που δέχεται το ουραίο πτερύγιο κατά τη μετακίνηση της θέσης του κέντρου βάρους.
Από την άλλη, τα μειωμένα στατικά περιθώρια επιτρέπουν καλύτερη εκμετάλλευση των ανωστικών δυνάμεων και η αντίσταση μειώνεται κάτι που οδηγεί σε ευχέρεια ελιγμών, μικρότερες επιφάνειες ελέγχου άρα και μικρότερο βάρος αεροσκάφους και βελτιωμένη κατανάλωση καυσίμου.
Υπενθυμίζοντας την εξίσωση (2.23), για ένα στατικά ευσταθές αεροσκάφος στο διάμηκες επίπεδο, πρέπει Cmα<0. Από την εξίσωση (2.27):
|
|
|
(8.15) |
Όσο το κέντρο βάρους κινείται προς τα πίσω, η διαμήκης στατική ευστάθεια μειώνεται, μέχρι το αεροσκάφος να γίνει ασταθές. Όταν γίνει ασταθές η μορφή ευστάθειας της μικρής περιόδου, παύει να είναι ταλαντωτική και παραμένει μια μόνιμη τιμή πρόνευσης (pitch up), που σημαίνει ότι το αεροσκάφος αποκτά μια σταθερή ανοδική πορεία.
Για να υπερκεραστούν οι επιδράσεις της μεταβολής της αποτελεσματικότητας του ελέγχου κατά το εύρος του φακέλου πτήσης, απαιτείται ένα πιο πολύπλοκο σύστημα επαύξησης της ευστάθειας που ονομάζεται σύστημα ελέγχου προσανατολισμού της πρόνευσης (pitch orientation control system). Το δομικό διάγραμμα ενός τέτοιου συστήματος φαίνεται στο σχήμα 8.7, ενώ μια μορφή τεχνολογικής του υλοποίησης φαίνεται στο σχ. 8.2.
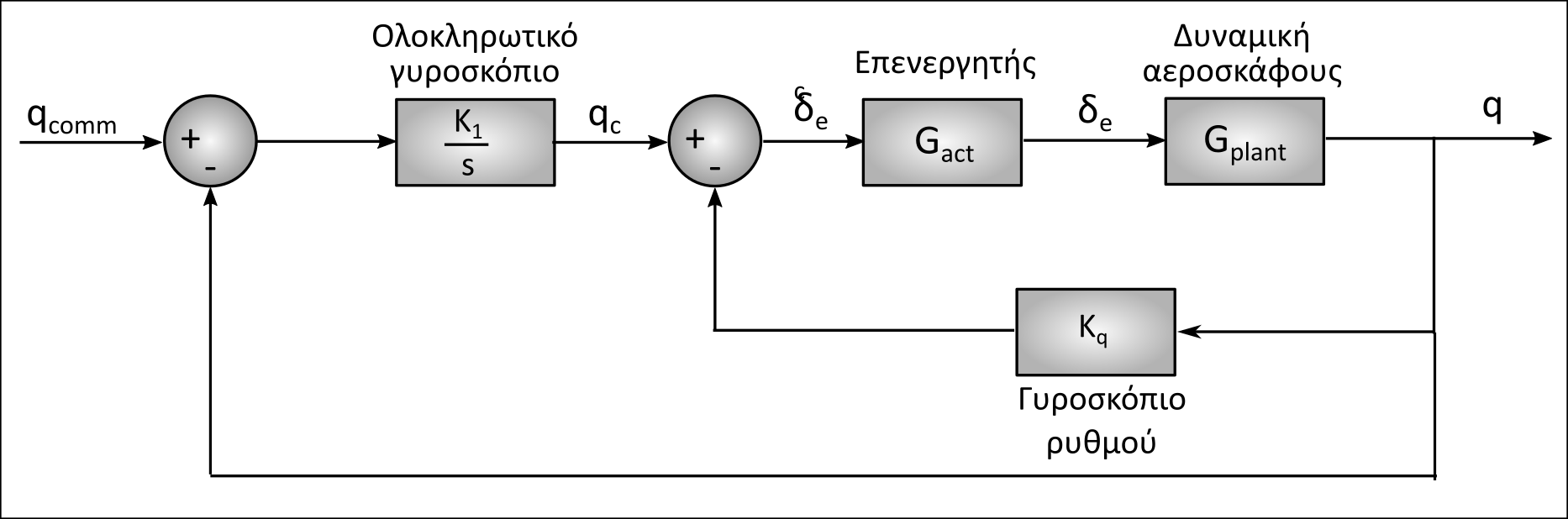
Σχήμα 8.7 Σύστημα επαύξησης της διαμήκους στατικής ευστάθειας με ανάδραση του ρυθμού πρόνευσης και της κατακόρυφης επιτάχυνσης στο πηδάλιο ανόδου-καθόδου
Ο εσωτερικός βρόχος, είναι ένα κλασσικό SAS αποσβεστήρα πρόνευσης, ενώ στον εξωτερικό βρόγχο, αναδράται ο ρυθμός πρόνευσης που προστίθεται στην εντολή qcomm και οδηγείται σε ένα ολοκληρωτικό γυροσκόπιο (integrate gyroscope). Με οποιαδήποτε μέθοδο σχεδιασμού ΣΑΕ μπορούν να επιλεγούν τα κατάλληλα κέρδη Κq,K1.
Μια άλλη μέθοδος είναι με εισαγωγή ενός κυκλώματος Washout. Η λειτουργία του συνοψίζεται στο ότι μπλοκάρει τη μόνιμη τιμή και επιτρέπει τη μετάδοση μόνο των διαταραχών της.
3.1.3.Συστήματα μικτής ανάδρασης
Αποσκοπώντας σε ακόμα καλύτερο έλεγχο και βελτιωμένα χαρακτηριστικά ευκολίας χειρισμού, σχεδιάζονται συστήματα, με περισσότερες από μια μεταβλητές ανάδρασης. Στην κλασσικότερη περίπτωση [7], όπως δείχνει και το σχήμα 8.8, στο κύκλωμα ενός κλασσικού αποσβεστήρα πρόνευσης, προστίθεται μια δεύτερη ανάδραση, αυτή της κάθετης επιτάχυνσης az, που μετράται άμεσα με ένα επιταχυνσιόμετρο.
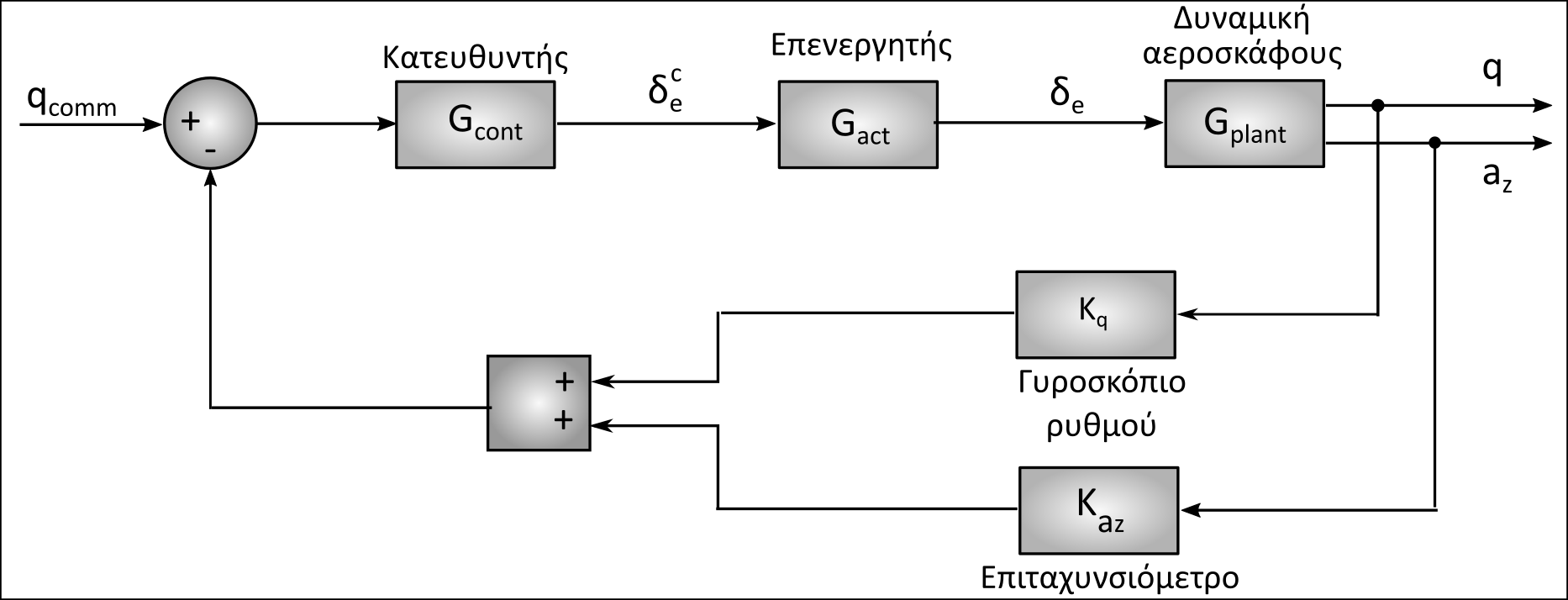
Σχήμα 8.8 Απόσβεση πρόνευσης με ανάδραση του ρυθμού πρόνευσης και της κατακόρυφης επιτάχυνσης στο πηδάλιο ανόδου-καθόδου
Τότε ο νόμος ελέγχου ως προς το πηδάλιο ανόδου καθόδου, είναι της μορφής:
|
|
|
(8.16) |
όπου
• Κq: κέρδος ανάδρασης του γυροσκοπίου ρυθμού,
• Κaz: κέρδος ανάδρασης του επιταχυνσιομέτρου.
Ένα τέτοιο σύστημα, ονομάζεται «μικτό σύστημα ανάδρασης» (blended feedback system).
Αναφέρθηκε προηγουμένως, η σημασία της θέσης που τοποθετούνται οι αισθητήρες. Στον νόμο ελέγχου που διατυπώθηκε πιο πάνω, θεωρείται η κάθετη επιτάχυνση στο κέντρο βάρους -γι’ αυτό και ο δείκτης cg- η οποία δίνεται από τη σχέση:
|
|
|
(8.17) |
Στην περίπτωση που η επιτάχυνση μετράται σε άλλο σημείο του αεροσκάφους, έστω σε οριζόντια απόσταση x από αυτό, τότε:
|
|
|
(8.18) |
Η χρήση αυτού του κυκλώματος, οδηγεί σε ένα πιο στιβαρό σύστημα, δηλαδή μεγαλύτερη απόσβεση ζs, όμως παράλληλα αυξάνεται η φυσική συχνότητα ωs. Η βασικότερη όμως επιδίωξη κατά την εφαρμογή του, είναι η διατήρηση σταθερών χαρακτηριστικών ευκολίας χειρισμού σε όλο το εύρος του φακέλου πτήσης. Αυτό εξαρτάται από τον λόγο Κq/Kaz. Γενικά σε χαμηλές δυναμικές πιέσεις Q=1/2ρUe2, ο λόγος αυτός ρυθμίζεται σε μεγάλες τιμές, έτσι ώστε να συμπεριφέρεται ως ένας κλασσικός αποσβεστήρας πρόνευσης με ανάδραση του q. Σε ψηλές δυναμικές πιέσεις ρυθμίζεται ώστε να συμπεριφέρεται περισσότερο ως ένα SAS με ανάδραση της az μόνο.
Παρόλη τη σημασία του ρυθμού πρόνευσης q σε αυτά τα συστήματα επαύξησης της ευστάθειας, η πραγματικότητα είναι ότι οι πιλότοι σπάνια δίνουν ως εντολή συγκεκριμένη τιμή του q, απλά απαιτούν μια συγκεκριμένη συμπεριφορά του αεροσκάφους σε μια εντολή ελιγμού.
Η ανάλυση στην εισαγωγή του κεφ. 7, δείχνει πως αυτή η εντολή ελιγμού -ουσιαστικά μια εντολή επιτάχυνσης- είναι απλά μια μορφή εντολής ρυθμού πρόνευσης qcomm. Επιπλέον, η ανάλυση στο υποκεφάλαιο 3.2 του κεφ. 7, οδηγεί στην ουσιαστική ισοδυναμία του ελέγχου της κατακόρυφης επιτάχυνσης με τον έλεγχο του ανηγμένου συντελεστή φόρτισης ηα.
Εναλλακτικά από τις
προσεγγιστικές εκφράσεις των χαρακτηριστικών της ταλάντωσης της μικρής
περιόδου, προκύπτει ότι με αύξηση των παραγώγων ευστάθειας Mw και ![]() αυξάνονται
και τα ζs,ωs.
αυξάνονται
και τα ζs,ωs.
Για να επιτευχθεί αυτή η αύξηση εφαρμόζεται ένας νόμος ελέγχου βασιζόμενος στη γωνία πρόσπτωσης της μορφής:
|
|
|
(8.19) |
Έχει όμως αναφερθεί ήδη και φάνηκε και στα παραδείγματα ότι η ![]() είναι
γενικά αμελητέα που συνεπάγεται ότι ο έλεγχος αυτός, επηρεάζει ελάχιστα την
ταλάντωση του φυγοειδούς.
είναι
γενικά αμελητέα που συνεπάγεται ότι ο έλεγχος αυτός, επηρεάζει ελάχιστα την
ταλάντωση του φυγοειδούς.
Η εφαρμογή αυτού του SAS, τείνει να σταθεροποιεί τον κάθετο συντελεστή φόρτισης nz και τη γωνία πρόσπτωσης α. Το πρόβλημα όμως είναι η αναξιοπιστία των μετρήσεων της γωνίας πρόσπτωσης και του ρυθμού μεταβολής της, καθώς χρησιμοποιείται ως αναφορά ο σχετικός άνεμος. Για τον λόγο αυτό έχει περιορισμένη εφαρμογή, κυρίως σε αεροσκάφη υψηλών επιδόσεων.
Μια πιο αξιόπιστη έμμεση μέθοδος μέτρησης της γωνίας πρόσπτωσης, είναι με βάση την κατακόρυφη επιτάχυνση az, οπότε ουσιαστικά προκύπτει μια διαφορετική παραλλαγή μικτής ανάδρασης του ρυθμού πρόνευσης και της κατακόρυφης επιτάχυνσης.
3.2. Αύξηση εγκάρσιας ευστάθειας και απόσβεσης
Στη μελέτη της δυναμικής της εγκάρσιας κίνησης του αεροσκάφους, αναλύθηκαν οι τρεις ιδιομορφές που διακρίνονται ως σχετικά ανεξάρτητες:
• μορφή υποχώρησης της περιστροφής,
• μορφή του σπειροειδούς,
• μορφή της ολλανδικής περιστροφής.
Στις τρεις αυτές μορφές παρατηρείται γενικά μια καλά αποσβενόμενη απόκριση του ρυθμού περιστροφής p, μια μακροπρόθεσμα τάση το αεροσκάφος να διατηρείται είτε σε θέση με οριζόντιες πτέρυγες (wings level) είτε σε αποκλίνουσα σπειροειδή κίνηση και μια ευσταθής συμπεριφορά ως προς τη διεύθυνση («ανεμουριακή συμπεριφορά»).
Ωστόσο, σε αεροσκάφη, όπου η επίδραση του φαινομένου της δίεδρης γωνίας είναι μεγάλη, η απόσβεση της περιστροφής είναι μικρή, και σαν αποτέλεσμα οι μορφές της υποχώρησης της περιστροφής και του σπειροειδούς μπορεί να συγκλίνουν σε μια ενιαία ιδιομορφή, η οποία ονομάζεται και «εγκάρσιο φυγοειδές». Επιπλέον, επειδή η απόσβεση της Ολλανδικής περιστροφής είναι μικρή, ο χειρισμός του αεροσκάφους μπορεί να αποβεί ιδιαίτερα δύσκολος, ειδικά σε περιπτώσεις ελιγμών συντονισμένης περιστροφής χωρίς πλαγιολίσθηση.
Για τον λόγο αυτό, χρησιμοποιούνται τρεις βασικές μορφές συστημάτων επαύξησης της ευστάθειας:
• η απόσβεση της εκτροπής,
• η απόσβεση της περιστροφής,
• η απόσβεση της σπειροειδούς απόκλισης.
Επειδή η εγκάρσια κίνηση του αεροσκάφους ελέγχεται στην πραγματικότητα από τη συνδυασμένη δράση των πηδαλίων εκτροπής και κλίσης, η ανάλυση και ο σχεδιασμός των συστημάτων ελέγχου της εγκάρσιας δυναμικής είναι αρκετά πιο σύνθετος από αυτόν της διαμήκους και υλοποιείται με σύνθετα συστήματα ελέγχου, όπου οι κινήσεις αυτών των δύο πηδαλίων συγχρονίζονται. Παρά το γεγονός αυτό, η ανάλυσή των τριών αυτών βασικών μορφών επαύξησης της ευστάθειας πραγματεύεται σε αυτό το κεφάλαιο συστήματα ανάδρασης σε μια μόνο αεροδυναμική επιφάνεια, δηλαδή είτε στα πηδάλια εκτροπής, είτε στα πηδάλια κλίσης. Ωστόσο, τα βασικά συμπεράσματα που προκύπτουν οδηγούν σε χρήσιμες φυσικές πληροφορίες, ενώ οι βρόχοι ελέγχου που παρουσιάζονται, αποτελούν τμήματα (εσωτερικούς βρόχους) γενικότερων συντονισμένων μορφών ελέγχου της εγκάρσιας δυναμικής.
3.2.1 Απόσβεση Ολλανδικής Περιστροφής
Όπως αναφέρθηκε στο 5ο κεφάλαιο περί εγκάρσιας-διεύθυνσης δυναμικής, η μόνη ταλαντωτική μορφή ευστάθειας είναι η ολλανδική περιστροφή, η οποία είναι το εγκάρσιο-διεύθυνσης ισοδύναμο της μορφής της μικρής περιόδου από τη διαμήκη δυναμική. Οι συχνότητες της είναι παρόμοιες με της μικρής περιόδου. Επειδή όμως, το κάθετο ουραίο σταθερό πτερύγιο είναι λιγότερο αποτελεσματικό ως αποσβεστήρας σε σχέση με το οριζόντιο σταθερό, η απόσβεση της είναι συνήθως μη επαρκής.
Οπότε κρίνεται απαραίτητος ο σχεδιασμός ενός συστήματος επαύξησης της ευστάθειας που να ελέγχει την απόκριση του ρυθμού εκτροπής κατά την εφαρμογή μιας εισόδου στο πηδάλιο εκτροπής και να δίνει τη δυνατότητα αύξησης της απόσβεσης της μορφής της ολλανδικής περιστροφής.
Παράδειγμα 8.2.
Το δομικό διάγραμμα ενός τέτοιο συστήματος, φαίνεται στο σχήμα Π8.2.1.
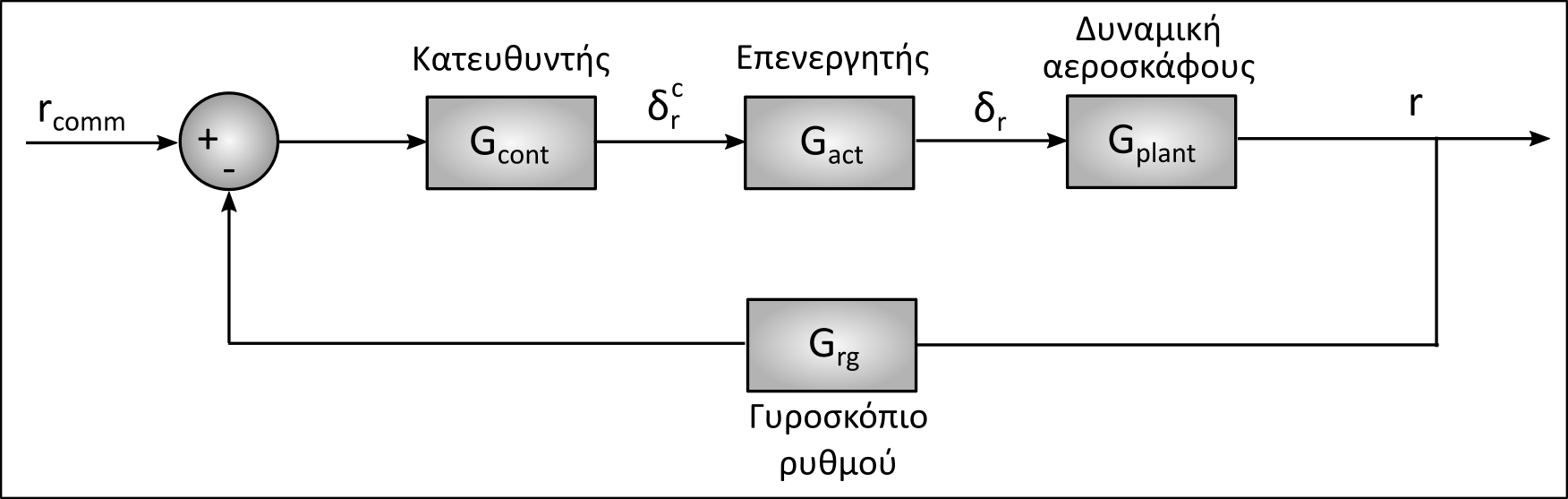
Σχήμα Π8.2.1 Δομικό διάγραμμα συστήματος επαύξησης της απόσβεσης της εκτροπής με έλεγχο του ρυθμού εκτροπής r.
Εξετάζοντας και πάλι την περίπτωση του αεροσκάφους Boeing 747-100 (παράρτημα Η.1, - 3η περίπτωση), η συνάρτηση μεταφοράς του ρυθμού εκτροπής ως προς το πηδάλιο εκτροπής όπως προκύπτει από την επίλυση των πλήρων εξισώσεων της εγκάρσιας-διεύθυνσης δυναμικής:
|
|
|
(8.20) |
Υπολογίζοντας τις ρίζες αριθμητή και παρονομαστή, ομαδοποιείται ως εξής:
|
|
|
(8.21) |
Τότε οι πόλοι και μηδενιστές της ΣΜ είναι:
|
|
|
|
Η ΣΜ του επενεργητή του πηδαλίου εκτροπής:
|
|
|
(8.22) |
Αρχικά υποτίθεται ένας αναλογικός (“P”) κατευθυντής:
|
|
|
(8.23) |
Το γυροσκόπιο ρυθμού παρίσταται ως είναι ένα απλό κέρδος:
|
|
|
(8.24) |
Η συνάρτηση μεταφοράς του κλειστού βρόχου έχει τη μορφή:
|
|
|
(8.25) |
Και η χαρακτηριστική εξίσωση:
|
|
|
(8.26) |
Αν όπως προαναφέρθηκε, το κέρδος του γυροσκοπίου ρυθμού είναι εκ κατασκευής ορισμένο και θετικό, το αρνητικό πρόσημο υπεισέρχεται μέσω ενός P κατευθυντή με αρνητικό κέρδος.
Κατατάσσοντας το Boeing 747-100 στην κατηγορία αεροσκάφους ΙΙΙ, οι ελάχιστες απαιτούμενες τιμές των χαρακτηριστικών 1ου επιπέδου, της ολλανδικής περιστροφής για τις πιο απαιτητικές φάσεις πτήσης (CAT A), είναι σύμφωνα με τον πίνακα 7.9:
|
|
|
|
Στο σχήμα Π8.2.2, παρουσιάζεται ο τόπος των ριζών, καθώς και οι επιθυμητές περιοχές τοποθέτησης των πόλων, ενώ φαίνεται πως μετατοπίζονται οι πόλοι κλείνοντας τον βρόχο με την ανάδραση του ρυθμού εκτροπής. Στο παρόν τέθηκαν:
|
|
|
|
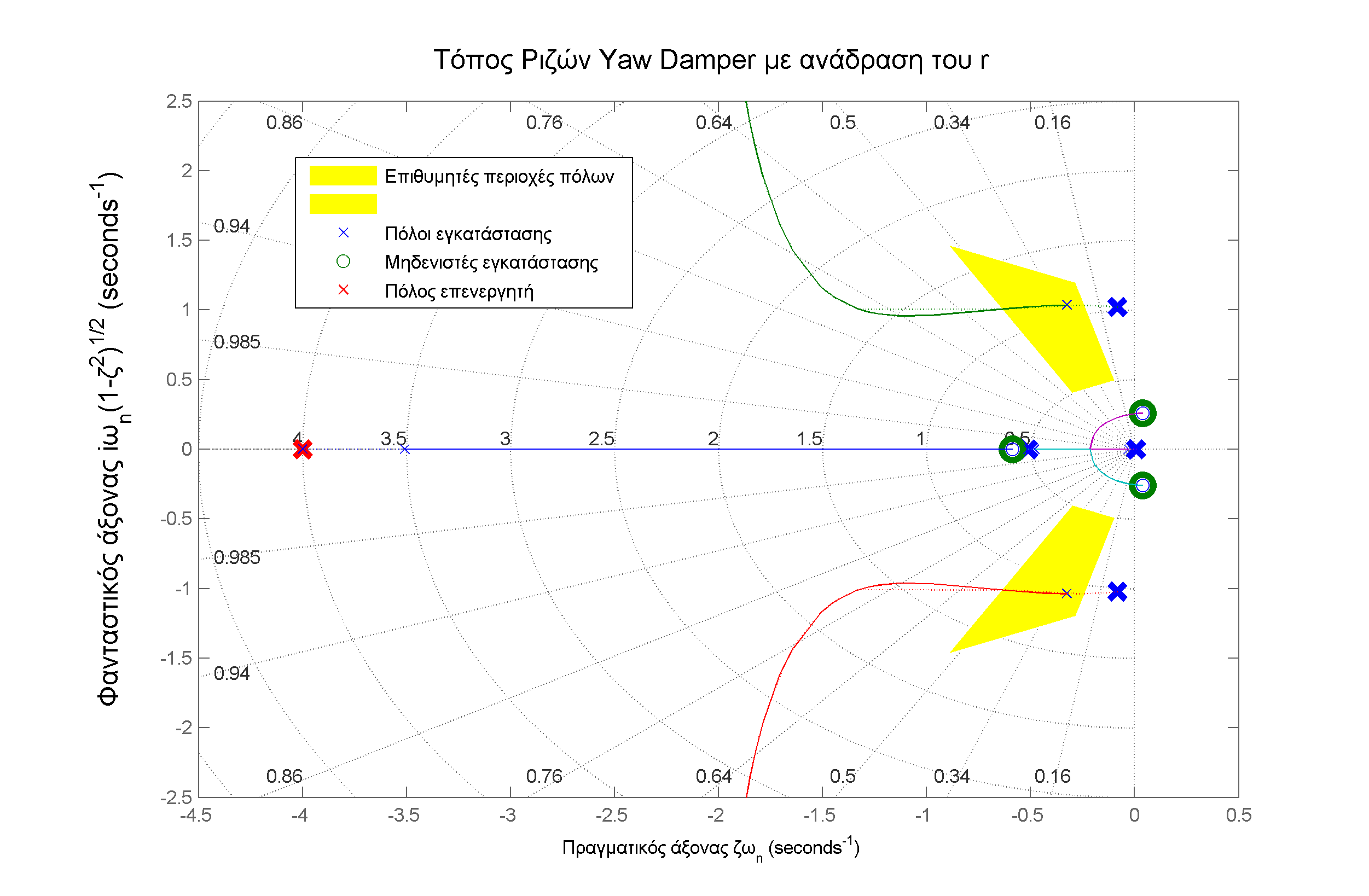
Σχήμα Π8.2.2 Τόπος ριζών του συστήματος επαύξησης της απόσβεσης της εκτροπής με ανάδραση του ρυθμού εκτροπής r. Μετατόπιση των πόλων στις επιθυμητές περιοχές με τη μεταβολή του κέρδους κατευθυντή.
Στο σχήμα Π8.2.3 παρουσιάζεται η απόκριση του συστήματος επαύξησης της απόσβεσης της εκτροπής με ανάδραση του ρυθμού εκτροπής r (yaw damper) σε είσοδο μοναδιαίου παλμού για τα κέρδη που τέθηκαν πιο πάνω.
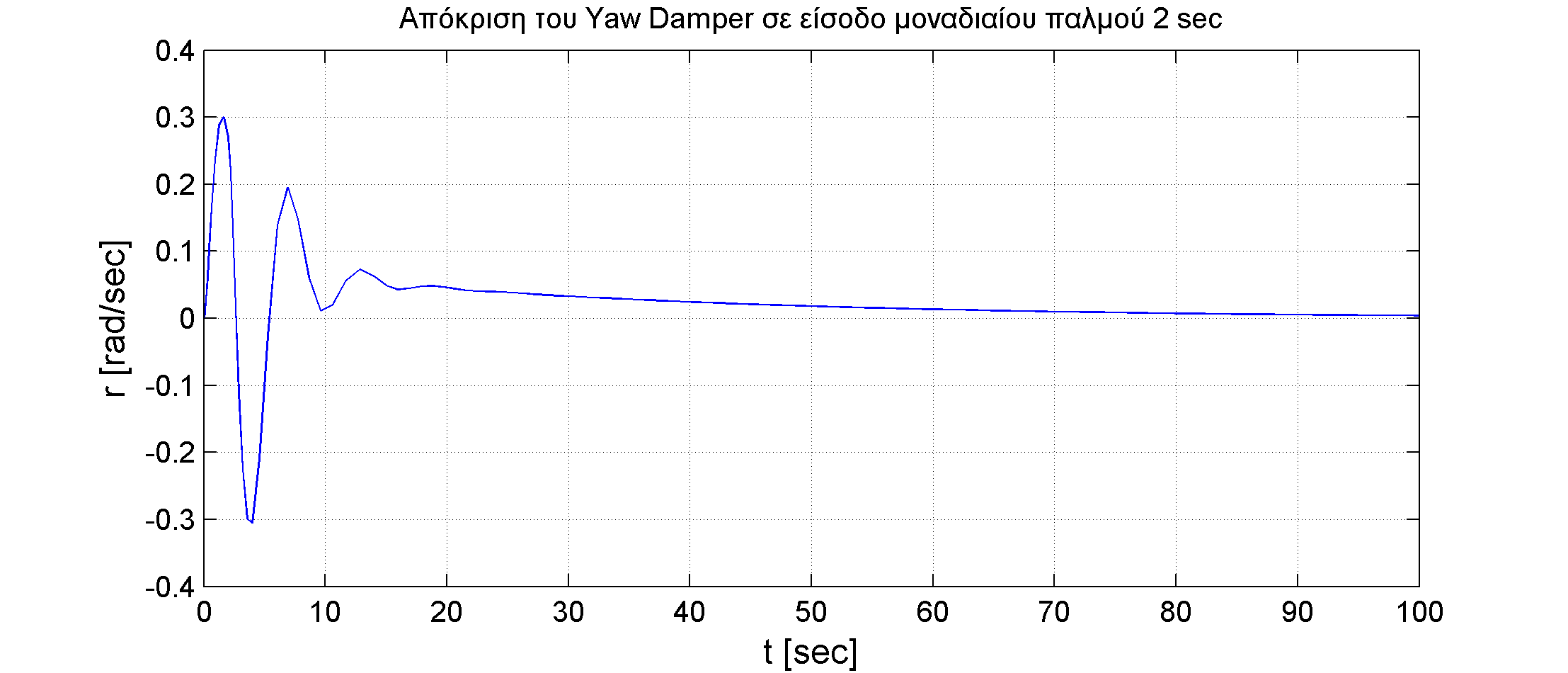
Σχήμα Π8.2.3 Απόκριση ρυθμού εκτροπής r σε είσοδο μοναδιαίου παλμού 2 sec του πηδαλίου εκτροπής.
Γενικά φαίνεται ότι το σύστημα μπορεί να λειτουργήσει ικανοποιητικά ώστε να επιτευχθεί η επιθυμητή μορφή της απόκρισης του ρυθμού εκτροπής.
Υπάρχουν όμως ελιγμοί όπως η σταθερή στροφή, που απαιτείται ένας σταθερός ρυθμός εκτροπής. Στην παρούσα του μορφή, όπως φάνηκε αντιτίθεται σε μια τέτοια εντολή, στέλνοντας κατάλληλες εντολές στο πηδάλιο εκτροπής που οδηγούν τον ρυθμό εκτροπής σε μηδενική τιμή μόνιμης κατάστασης. Στις περιπτώσεις τέτοιων ελιγμών, ούτως ώστε να μην χρειάζεται ο πιλότος να εφαρμόζει την εντολή ελέγχου καθ’ όλη τη διάρκεια του ελιγμού απαιτείται ο σχεδιασμός ενός διαφορετικού συστήματος.
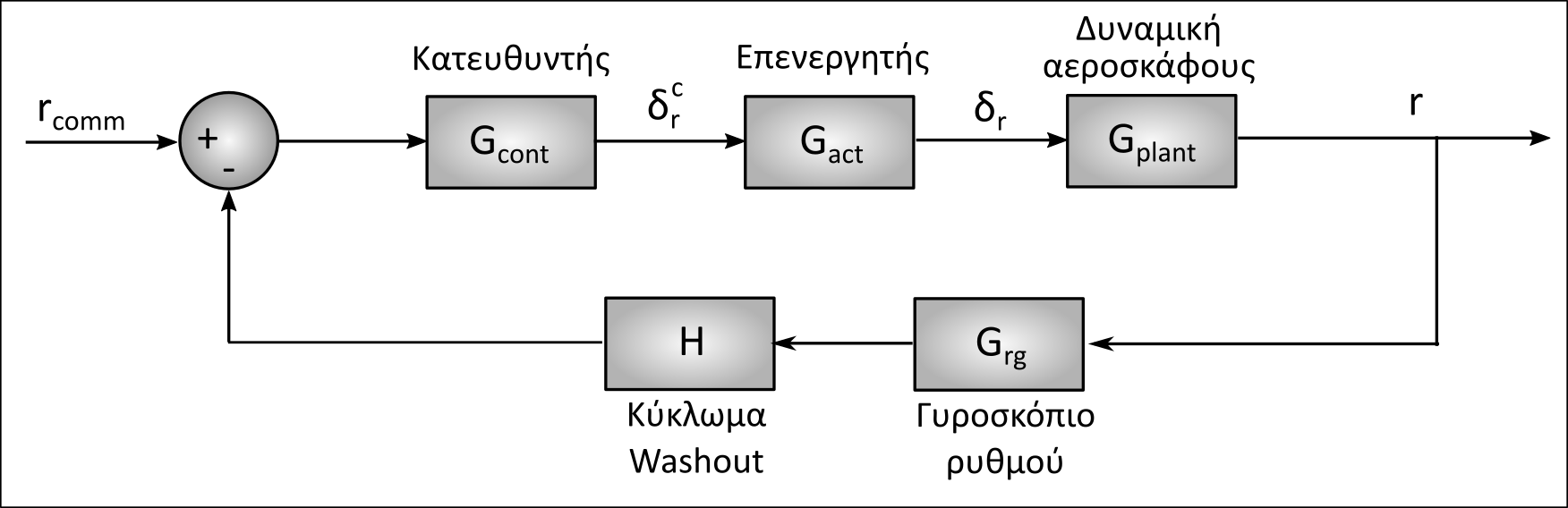
Σχήμα Π8.2.4 Σύστημα επαύξησης της απόσβεσης της εκτροπής με κύκλωμα Washout στην ανάδραση.
Έτσι, στην αρχική μορφή του yaw damper, προστίθεται στην ανάδραση ένα κύκλωμα Washout -όπως δείχνει το σχήμα Π8.2.4- που διέπεται από μια ΣΜ της μορφής:
|
|
|
(8.27) |
όπου Two, η χρονική σταθερά του κυκλώματος.
Το κύκλωμα washout, είναι ένα υψιπερατό φίλτρο. Δηλαδή επιτρέπει τη μετάδοση μόνο των υψίσυχνων σημάτων ανάδρασης r που σημαίνει ότι η τιμή μόνιμης κατάστασης rss, δεν ανατροφοδοτείται στον κατευθυντή.
Με την προσθήκη του κυκλώματος αυτού, η χαρακτηριστική του κλειστού βρόχου του συστήματος ελέγχου γίνεται:
|
|
|
(8.28) |
O τόπος των ριζών του συστήματος, για Τwo=2 sec Kcont = -1, και Κr = 1, φαίνεται στο σχήμα Π8.2.5, όπως και η μετακίνηση των πόλων στις επιθυμητές περιοχές με το κλείσιμο του βρόχου.
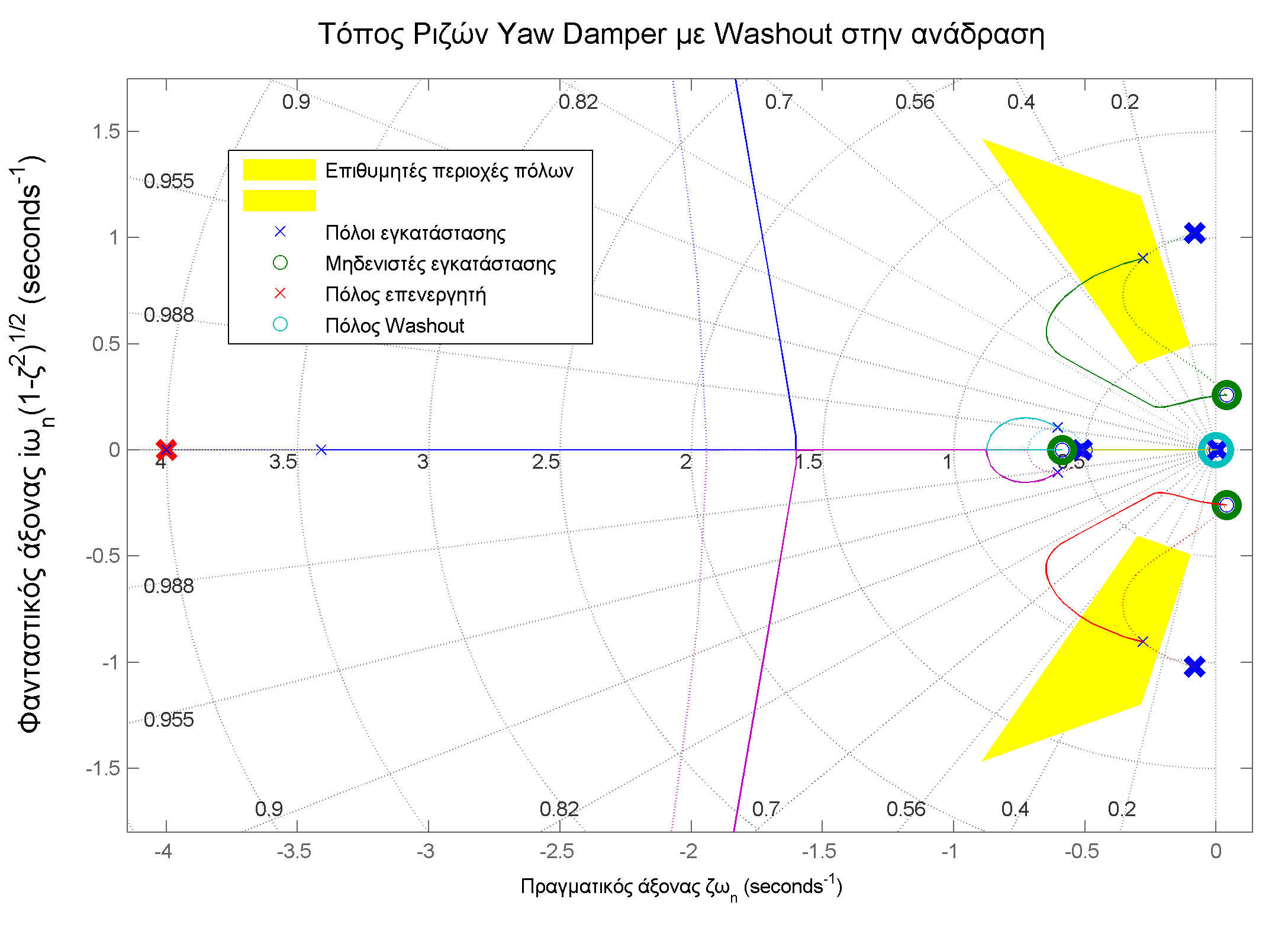
Σχήμα Π8.2.5 Τόπος ριζών του συστήματος επαύξησης της απόσβεσης της εκτροπής με κύκλωμα Washout στην ανάδραση. Μετατόπιση των πόλων στις επιθυμητές περιοχές με τη μεταβολή του κέρδους κατευθυντή.
Το κύκλωμα washout τοποθετεί ένα μηδενιστή στην αρχή των αξόνων και έτσι δημιουργείται ένας κλάδος του τόπου ριζών μεταξύ αυτού του μηδενιστή και του πόλου της ΣΜ του ρυθμού εκτροπής στο δεξιό ημιεπίπεδο. Όμως ο πόλος αυτός, βρίσκεται πολύ κοντά στον φανταστικό άξονα οπότε είναι πολύ αργός και η αστάθεια που δημιουργεί μπορεί να φανεί μόνο μακροπρόθεσμα (t>100 sec), άρα μπορεί να ελεγχθεί από τον πιλότο.
Με τα προαναφερθέντα δεδομένα, η απόκριση του ρυθμού εκτροπής σε είσοδο παλμού διαρκείας 2 δευτερολέπτων, δίνεται στο ακόλουθο σχήμα Π8.2.6:
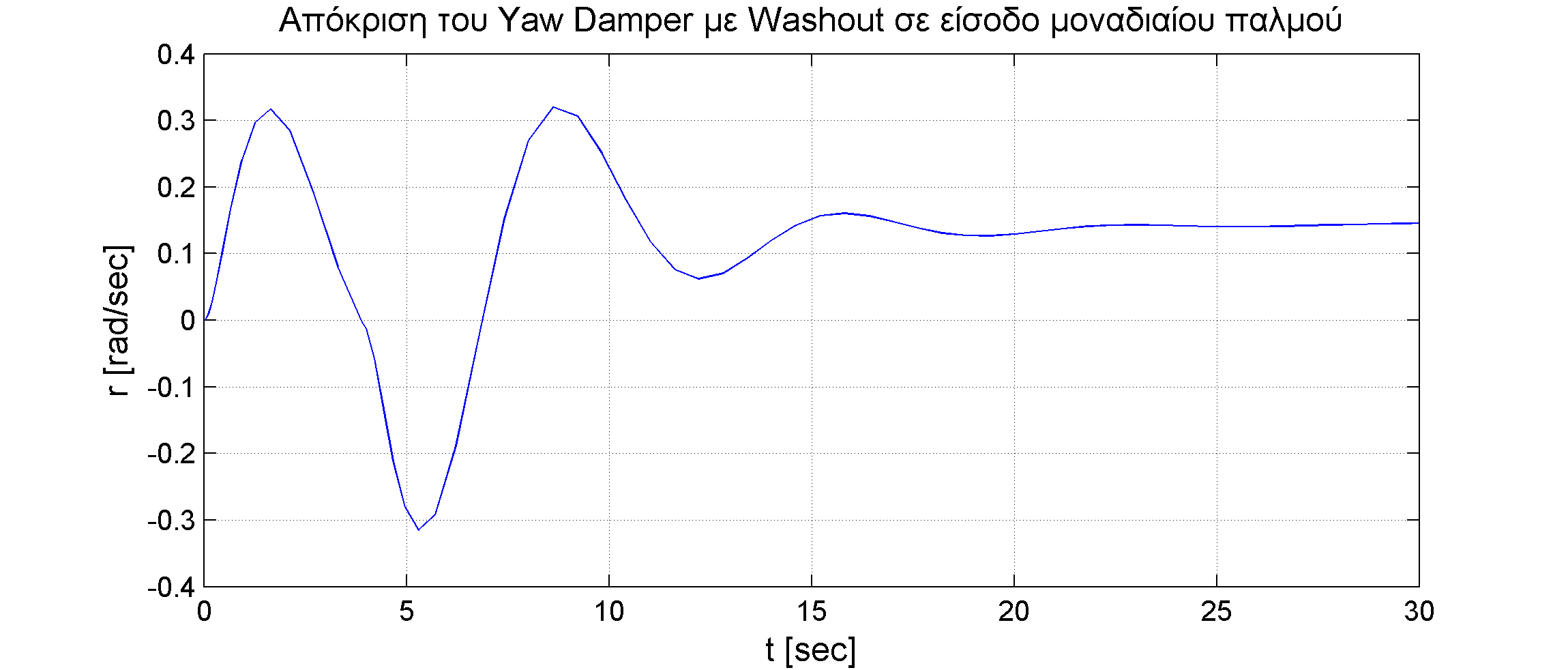
Σχήμα Π8.2.6 Απόκριση ρυθμού εκτροπής με την εισαγωγή του κυκλώματος Washout στο SAS απόσβεσης της εκτροπής με ανάδραση του r.
3.2.2. Απόσβεση του ρυθμού περιστροφής
Τα συστήματα αυτής της κατηγορίας, σχεδιάζονται γενικά όταν η συμπεριφορά του αεροσκάφους ως προς την περιστροφή δεν είναι ικανοποιητική. Συνήθως αυτό συνεπάγεται ότι ο χρόνος απόκρισης του αεροσκάφους σε μια εντολή περιστροφής είναι μεγάλος, οπότε επιδιώκεται ο σχεδιασμός ενός SAS για ταχύτερη επίτευξη ενός επιθυμητού ρυθμού περιστροφής.
Η παράγωγος ευστάθειας που αντιπροσωπεύει την απόσβεση της μορφής της περιστροφής είναι η Lp, δηλαδή της ροπής περιστροφής λόγω του ρυθμού περιστροφής. Ουσιαστικά η προσοχή στρέφεται στη μορφή ευστάθειας υποχώρησης της περιστροφής της οποίας η χρονική σταθερά είναι:
|
|
|
(8.29) |
Το συγκεκριμένο σύστημα, αποτελεί συνήθως ένα εσωτερικό βρόχο του αυτομάτου πιλότου της γωνίας πορείας ψ. Το δομικό διάγραμμα του φαίνεται στο σχήμα 8.9.
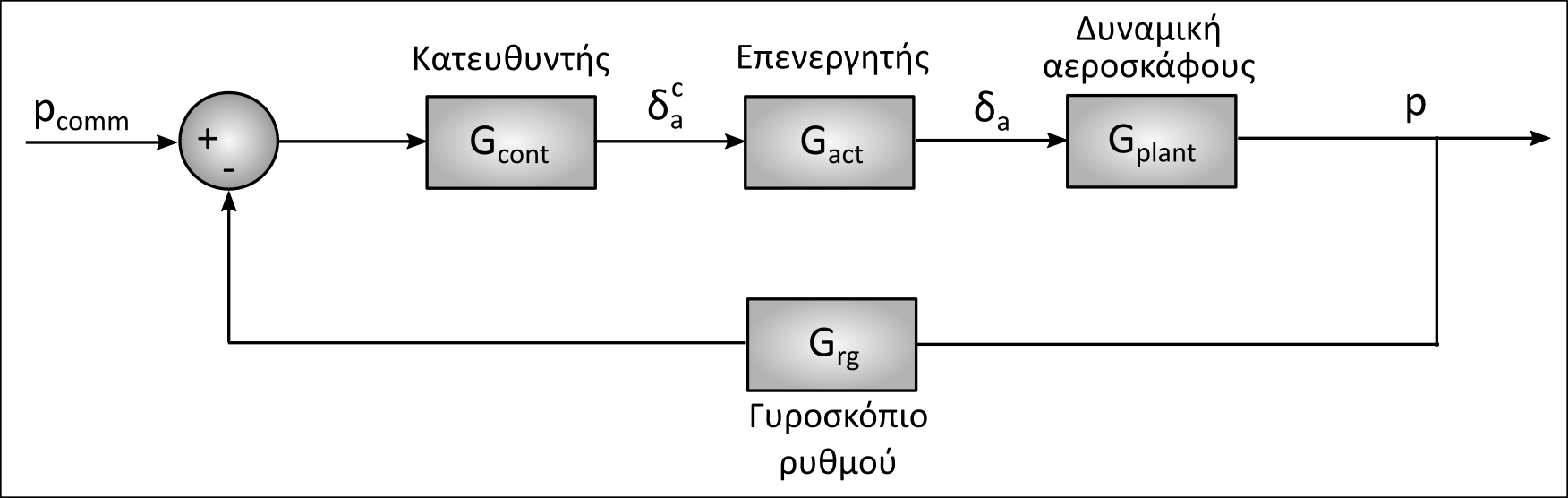
Σχήμα 8.9 Δομικό διάγραμμα συστήματος επαύξησης της απόσβεσης του ρυθμού περιστροφής p με ανάδραση του στα πηδάλια κλίσης.
Όπως και στα προηγούμενα συστήματα, υποτίθεται ότι το γυροσκόπιο ρυθμού για τη μέτρηση του ρυθμού περιστροφής που αναδράται στο σύστημα, παριστάνεται από κάποιο απλό κέρδος.
|
|
|
(8.30) |
Επίσης, η δυναμική του επενεργητή των πηδαλίων κλίσης (ailerons) περιγράφεται από μια πρώτης τάξης ΣΜ για να παρασταθεί η καθυστέρηση του ηλεκτροϋδραυλικού συστήματος.
Όσον αφορά τη δυναμική του αεροσκάφους που εμπλέκεται, στην παρούσα ανάλυση χρησιμοποιείται κυρίως η έκφραση της προσέγγισης της υποχώρησης της περιστροφής. Το πόσο αντιπροσωπευτική είναι αυτή η προσέγγιση, εξαρτάται κυρίως από τον τύπο του αεροσκάφους και τις συνθήκες πτήσης. Συνολικά όμως παρέχει μια πρώτη εικόνα της δυναμικής και της επίδρασης του ελέγχου στην περιστροφή του αεροσκάφους.
Τότε η συνάρτηση μεταφοράς του ρυθμού περιστροφής ως προς τα πηδάλια κλίσης από την εξίσωση (5.23):
|
|
|
(8.31) |
Η μείωση της χρονική σταθεράς Τr βελτιώνει τη δυναμική συμπεριφορά του αεροσκάφους κατά την περιστροφή ενώ συχνά έχει παράλληλα θετική επίδραση και στην ολλανδική περιστροφή.
Εν τέλει, το σύστημα αυτό αν και δεν επηρεάζει την επιτάχυνση της περιστροφής, περιορίζει τον μέγιστο ρυθμό περιστροφής που μπορεί να επιτύχει το αεροσκάφος, συνεπώς αυξάνει τον χρόνο επίτευξης μιας δεδομένης γωνίας κλίσης. Στην περίπτωση που το αποτέλεσμα δεν συνάδει με τα απαιτούμενα χαρακτηριστικά πτήσης και ευκολίας χειρισμού, χρειάζεται καλύτερος έλεγχος για επαύξηση της Lδa.
Επίσης, τονίζεται η σημασία του σημείου τοποθέτησης του γυροσκοπίου ρυθμού στο αεροσκάφος. Καθώς το αεροσκάφος περιστρέφεται περί του διανύσματος της ταχύτητας του, χαλά η ευθυγράμμιση του άξονα περιστροφής με τον άξονα εισόδου του γυροσκοπίου κάτι που σχετίζεται άμεσα με τη γωνία πρόσπτωσης του αεροσκάφους και συγκεκριμένα με το συνημίτονό της. Καθώς όμως στην ανάλυση που χρησιμοποιήθηκε υποτίθενται μικρές γωνίες πρόσπτωσης, δεν υπεισέρχεται η κακή ευθυγράμμιση σε σημαντικό βαθμό ώστε να επηρεάζει τις μετρήσεις του γυροσκοπίου.
Παράδειγμα 8.3.
Στα προηγούμενα παραδείγματα αναλύθηκαν τα βασικά συστήματα ελέγχου και επαύξησης της ευστάθειας για την πρόνευση και την εκτροπή του αεροσκάφους. Στη συνέχεια μελετάται το αντίστοιχο σύστημα για τον έλεγχο της περιστροφής.
Χρησιμοποιείται ως σήμα ανάδρασης, ο ρυθμός περιστροφής p, που μετράται με ένα γυροσκόπιο ρυθμού. Η δυναμική της κίνησης περιγράφεται από τη σΜ του ρυθμού περιστροφής p ως προς τη γωνία μετατόπισης των πηδαλίων κλίσης δa η οποία προκύπτει από την προσέγγιση της εγκάρσιας-διεύθυνσης μορφής ευστάθειας υποχώρησης της περιστροφής, με τα δεδομένα του Boeing 747-100 (παράρτημα Η.1, 3η περίπτωση):
|
|
|
(8.32) |
Επίσης για τον επενεργητή, όπως και στα προηγούμενα παραδείγματα, θεωρείται η ΣΜ:
|
|
|
(8.33) |
Το γυροσκόπιο ρυθμού παριστάνεται ως ένα απλό κέρδος.
|
|
|
(8.34) |
Τότε επιλέγεται αναλογικός-διαφορικός κατευθυντής (PD) για αυξημένη απόσβεση και ευστάθεια, ο οποίος διέπεται από τη σχέση:
|
|
|
(8.35) |
Για την επιλογή του κατάλληλου κέρδους και των χαρακτηριστικών του κατευθυντή ώστε να τοποθετηθούν οι πόλοι στις επιθυμητές θέσεις, από τη ΣΜ του κλειστού βρόχου και θέτοντας το κέρδος που πρέπει να υπολογιστεί Κ=K’contKp:
|
|
|
(8.36) |
Σύμφωνα με τον πίνακα 7.6, μια τυπική επιθυμητή τιμή του Τr=1.4 sec. Άρα η επιθυμητή χαρακτηριστική εξίσωση κλειστού βρόχου είναι:
|
|
|
(8.37) |
Εξισώνοντας του συντελεστές του πολυωνύμου με της επιθυμητής χαρακτηριστικής:
|
|
|
(8.38) |
Προκύπτει το σύστημα:
|
|
|
(8.39) |
Επιλύοντας:
|
|
|
|
Τότε ο τόπος των ριζών του κλειστού βρόχου είναι αυτός του σχήματος Π8.3.1:
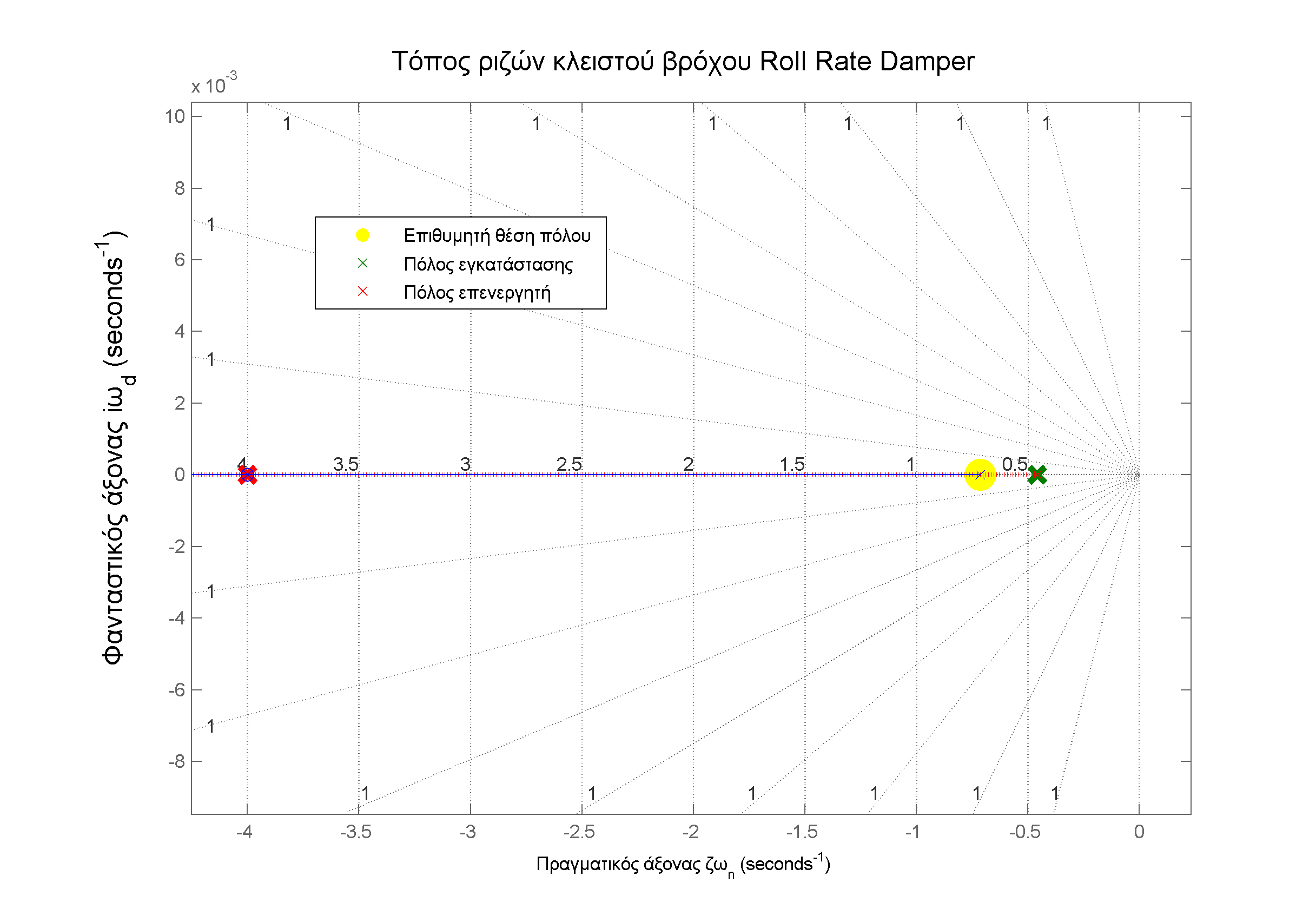
Σχήμα Π8.3.1 Τόπος ριζών συστήματος επαύξησης της απόσβεσης του ρυθμού περιστροφής p. Μετατόπιση των πόλων στις επιθυμητές περιοχές με τη μεταβολή του κέρδους κατευθυντή.
Η απόκριση του συστήματος σε είσοδο μοναδιαίου παλμού 2 sec, παρουσιάζεται στο σχήμα Π8.3.2:
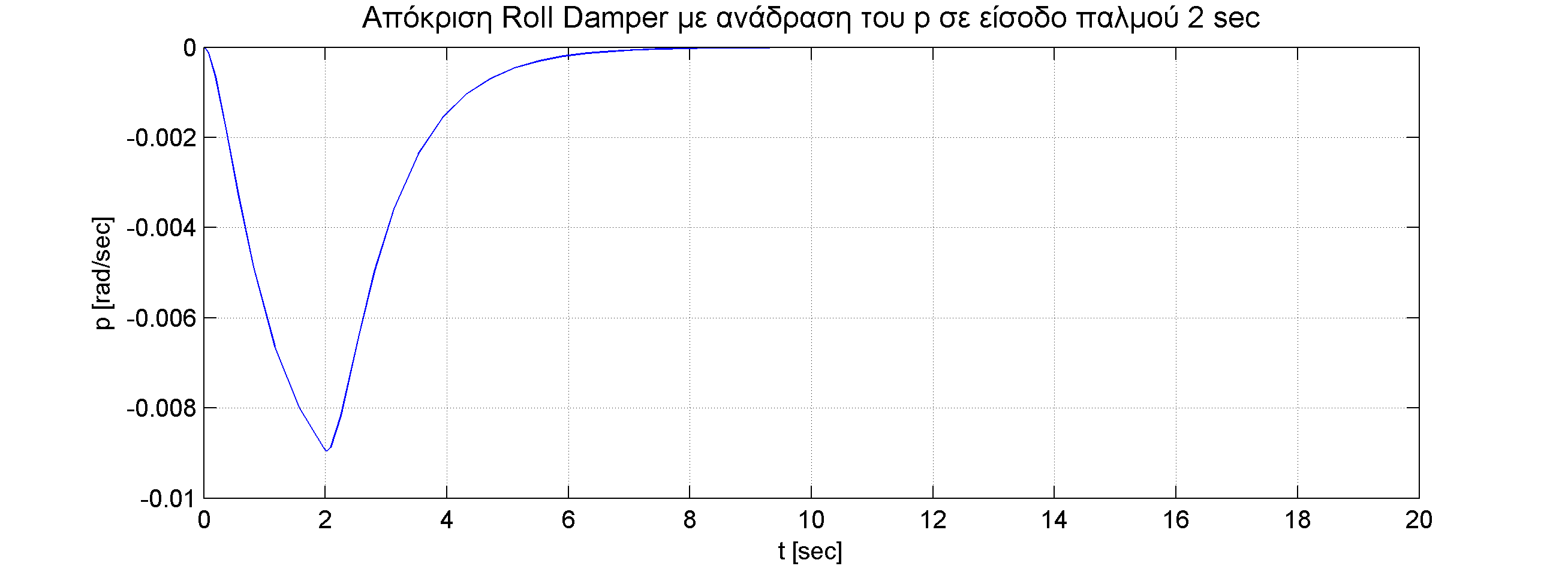
Σχήμα Π8.3.2 Απόκριση του ρυθμού περιστροφής p σε είσοδο παλμού 2 sec των πηδαλίων κλίσης στο σύστημα επαύξησης της απόσβεσης του ρυθμού περιστροφής.
4. Βασικά συστήματα αυτομάτων πιλότων
Για τη μείωση του φόρτου του πιλότου, ειδικά για τις πτήσεις μακράς ακτίνας, τα περισσότερα αεροσκάφη είναι εφοδιασμένα με κάποιο τύπο ενός αυτόματου συστήματος ελέγχου πτήσης (AFCS) ή με άλλα λόγια με έναν αυτόματο πιλότο. Τα περισσότερα συστήματα αυτομάτων πιλότων [7], [8], έχουν ως ελάχιστη ικανότητα τον έλεγχο μιας η περισσότερων βασικών παραμέτρων της θέσης και της κατάστασης τoυ αεροσκάφους, όπως οι:
• γωνία πρόνευσης,
• ύψος,
• ταχύτητα ή αριθμός Mach,
• βαθμός ανόδου-καθόδου,
• γωνία κλίσης,
• πορεία,
• βαθμός στροφής σε σταθερό ύψος και ταχύτητα,
• μηδενική εγκάρσια επιτάχυνση.
Στα αεροσκάφη υψηλών επιδόσεων, καθώς και στα αεροσκάφη που προορίζονται να εκτελούν πτήσης μεσαίας-μεγάλης ακτίνας , ο αυτόματος πιλότος έχει επιπλέον την ικανότητα να εκτελεί σύνθετες λειτουργίες πλοήγησης και ελιγμών, όπως:
Α) Διαμήκεις λειτουργίες:
• συνάντηση και τήρηση του ίχνους καθόδου (glideslope),
• οριζοντίωση (flare) πριν την προσγείωση,
• αυτόματη προσγείωση.
Β) Εγκάρσιες λειτουργίες:
• συνάντηση και διατήρηση του ίχνους του localizer του ILS,
• πτήση προς ένα ραδιοβοήθημα,
• πτήση προς ένα τυχαίο σημείο (way point).
4.1. Διαμήκεις βασικές λειτουργίες του αυτόματου πιλότου
4.1.1. Διατήρηση γωνίας πρόνευσης
Πρόκειται για μια από τις πρώτες λειτουργίες που χρησιμοποιήθηκαν στην αεροπορία. Ένας λόγος που συνέβη αυτό είναι διότι μέσω αυτού του βοηθήματος ο πιλότος παύει να ασχολείται με τον έλεγχο της γωνίας πρόνευσης του αεροσκάφους, κάτι που προσθέτει σημαντικό φόρτο σε πτήσεις διαμέσου αναταράξεων.
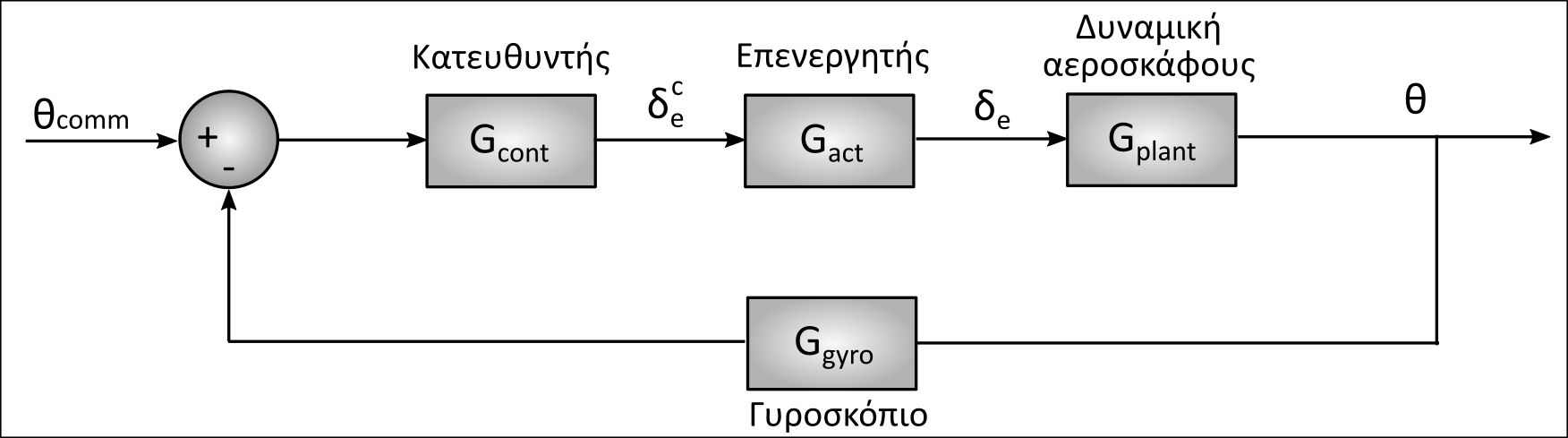
Σχήμα 8.10 Δομικό διάγραμμα συστήματος αυτόματου ελέγχου της πρόνευσης με απλή ανάδραση της γωνίας θ.
Η πιο απλή μορφή ελέγχου εικονίζεται στο σχ.8.10 και συνίσταται ουσιαστικά στην απλή ανάδραση της γωνίας πρόνευσης, όπως αυτή μετράται από ένα κατακόρυφο γυροσκόπιο (το όργανο πτήσης «τεχνητός ορίζοντας») μέτρησης της γωνίας αυτής. Το σήμα ελέγχου δρα στο πηδάλιο ανόδου καθόδου. Αυτή η δομή ελέγχου προσπαθεί να υποκαταστήσει το χειροκίνητο έλεγχο αυτής της γωνίας, δηλαδή το γεγονός ότι η ένας άνθρωπος ελέγχει τη γωνία πρόνευσης του αεροσκάφους παρατηρώντας τον «τεχνητό ορίζοντα» και δρώντας στο πηδάλιο ανόδου-καθόδου.
Όπως όμως θα παρουσιαστεί πιο κάτω στο παράδειγμα 8.4 το κύκλωμα που περιγράφηκε δεν δίνει ικανοποιητικά αποτελέσματα απόσβεσης για τη μικρή περίοδο, οδηγώντας σε έντονα μεταβατικά ταλαντωτικά φαινόμενα και πιθανόν αστάθεια. Για τον λόγο αυτό, προτίθεται και ένας εσωτερικός βρόχος απόσβεσης του ρυθμού πρόνευσης, όπως απεικονίζεται στο σχήμα 8.11 και επίσης μελετάται στο παράδειγμα 8.4.
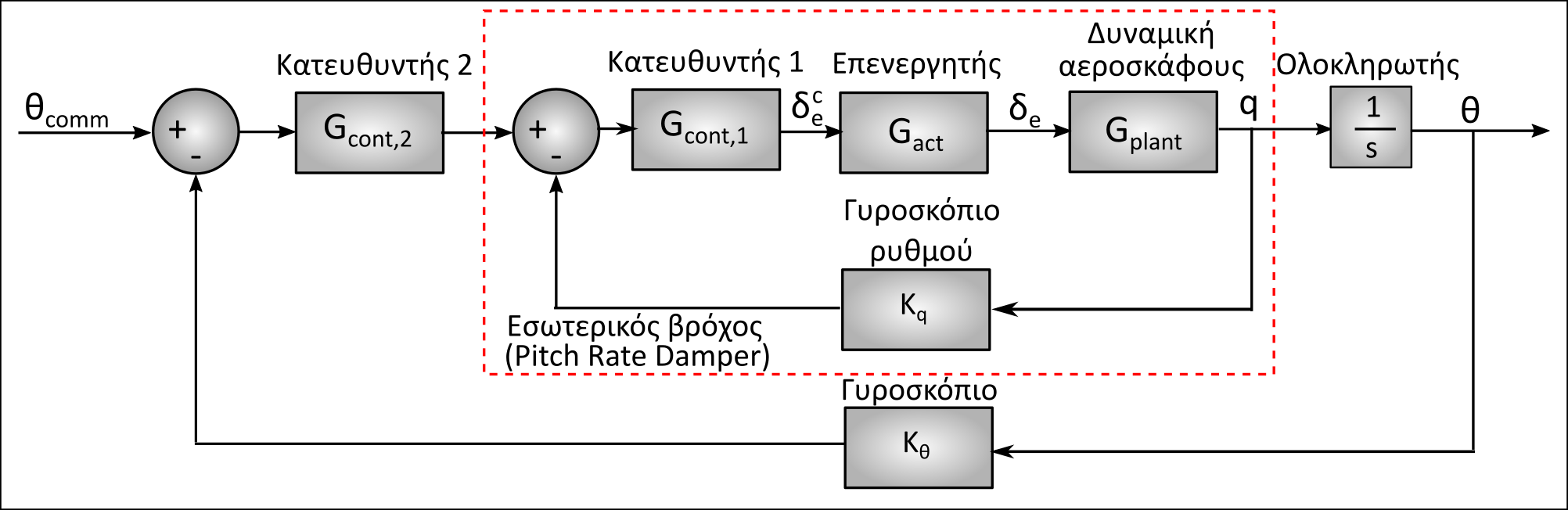
Σχήμα 8.11 Σύστημα επαύξησης της διαμήκους ευστάθειας με ανάδραση της πρόνευσης θ στον εξωτερικό βρόχο και του ρυθμού πρόνευσης στον εσωτερικό βρόχο.
Ένας τέτοιος αυτόματος πιλότος, με ιδιαίτερη έμφαση στην αύξηση της απόσβεσης μέσω του εσωτερικού βρόχου ανάδρασης, αναλύεται στο παράδειγμα 8.4.
Παράδειγμα 8.4.
Η γωνία θ λαμβάνεται ολοκληρώνοντας το σήμα που εξέρχεται από τη σΜ του ρυθμού πρόνευσης q. Χρησιμοποιούνται και σε αυτό το παράδειγμα τα δεδομένα του αεροσκάφους Boeing 747-100 (παράρτημα Η.1, 3η περίπτωση).
Εφόσον q=dθ/dt, άρα q=sθ, η ΣΜ της πρόνευσης προκύπτει:
|
|
|
(8.40) |
Οι πόλοι της χαρακτηριστικής εξίσωσης και ο μηδενιστής είναι:
|
|
|
|
Τα επιθυμητά χαρακτηριστικά της μικρής περιόδου και οι αντίστοιχες θέσεις των κυρίαρχων πόλων όπως προαναφέρθηκαν στο παράδειγμα 8.1:
|
|
|
|
Στο σχήμα Π8.4.1, παρουσιάζονται οι θέσεις των πόλων και του μηδενιστή της συνάρτησης μεταφοράς της πρόνευσης, ενώ οι κίτρινοι κύκλοι δείχνουν την περιοχή που πρέπει να μετατοπισθούν οι πόλοι, ώστε να επιτευχθούν τα επιθυμητά χαρακτηριστικά της μικρής περιόδου. Η τοποθέτηση των πόλων μπορεί να γίνει με την επιλογή του κατάλληλου κέρδους και του τύπου του κατευθυντή.
Για να είναι δυνατός ο έλεγχος της απόκρισης της πρόνευσης, ως πρώτη ενέργεια, σχεδιάζεται σύστημα επαύξησης της ευστάθειας με αρνητική ανάδραση της πρόνευσης θ στο πηδάλιο ανόδου-καθόδου, το οποίο έχει τη μορφή του σχήματος 8.10:
Θεωρείται αναλογικός κατευθυντής “P” με ΣΜ:
|
|
|
(8.41) |
Η δυναμική του επενεργητή του πηδαλίου ανόδου-καθόδου, περιγράφεται από τη σΜ:
|
|
|
(8.42) |
Το γυροσκόπιο παρίσταται ως είναι ένα απλό κέρδος:
|
|
|
(8.43) |
Ορίζοντας:
|
|
|
(8.44) |

Τότε παραπέμποντας στο παράρτημα Β.2.3, η ΣΜ του κλειστού βρόχου, γράφεται στη μορφή:
|
|
|
(8.45) |
Και η χαρακτηριστική εξίσωση:
|
|
|
(8.46) |
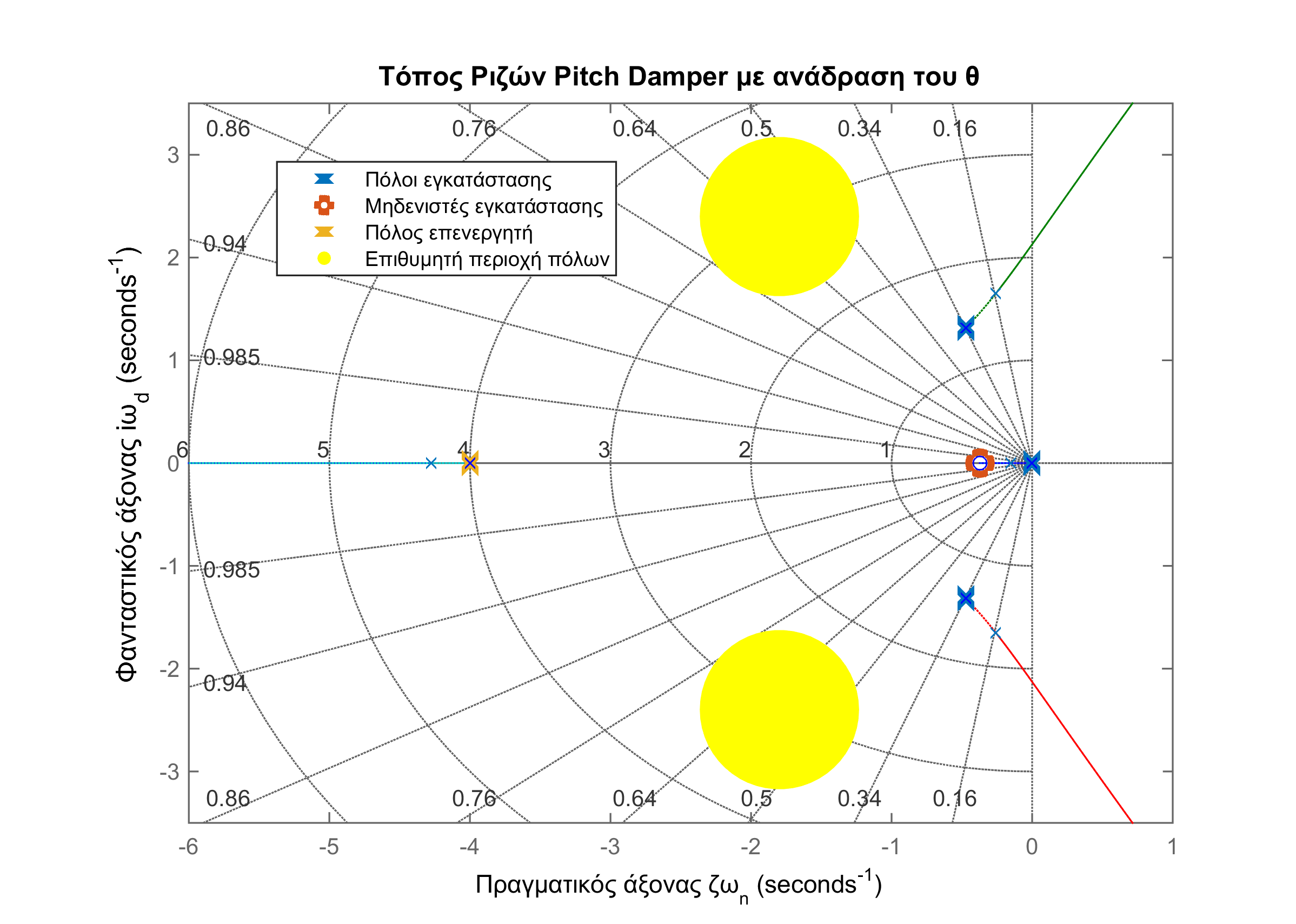
Σχήμα Π8.4.1 Τόπος ριζών του συστήματος επαύξησης της απόσβεσης της πρόνευσης με ανάδραση του θ. Μικρό περιθώριο ευστάθειας για τη μετατόπιση των πόλων στις επιθυμητές περιοχές με τη μεταβολή του κέρδους του κατευθυντή.
Αντικαθιστώντας στη χαρακτηριστική εξίσωση, προκύπτει:
|
|
|
(8.47) |
Δηλαδή λαμβάνοντας το κέρδος του κατευθυντή Kcont<0, ναι μεν είναι ευσταθές το σύστημα αλλά παρατηρείται μικρό περιθώριο ευστάθειας, καθώς όσο μεγαλώνει το κέρδος, ο πόλος της αρχής των αξόνων, με το κλείσιμο του βρόχου μετακινείται στο αριστερό ημιεπίπεδο, αλλά ταυτόχρονα οι δύο κυρίαρχοι πόλοι πλησιάζουν τον φανταστικό άξονα. Οπότε είναι προφανές ότι ένα σύστημα επαύξησης της ευστάθειας με ανάδραση της πρόνευσης δεν αρκεί για ικανοποιητικό έλεγχο όπως φαίνεται και στην πολύ ταλαντωτική απόκριση της γωνίας θ σε είσοδο μοναδιαίας βαθμίδας του πηδαλίου ανόδου-καθόδου, στο σχήμα Π8.4.2.
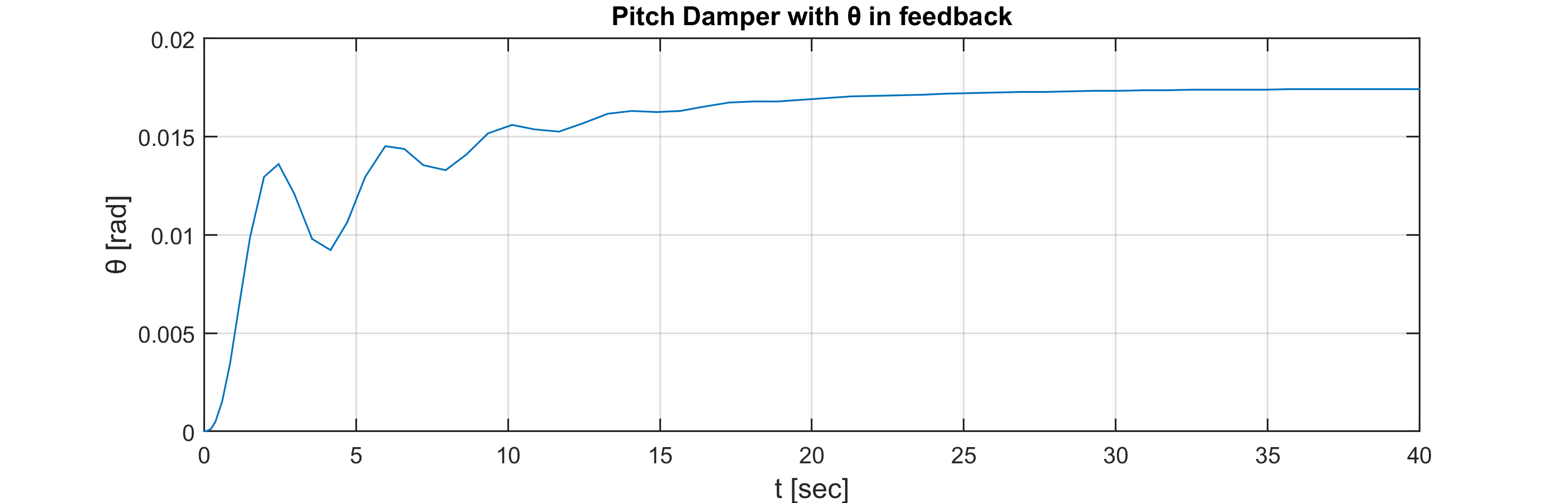
Σχήμα Π8.4.2 Απόκριση πρόνευσης σε είσοδο μοναδιαίας βαθμίδας του πηδαλίου ανόδου-καθόδου στο σύστημα επαύξησης της απόσβεσης της πρόνευσης με ανάδραση του θ.
Προσθέτοντας ένα εσωτερικό βρόχο ανάδρασης του ρυθμού πρόνευσης, το σύστημα παίρνει τη μορφή του δομικού διαγράμματος στο σχήμα 8.11:
Το δομικό διάγραμμα μπορεί να απλοποιηθεί όπως φαίνεται στο σχήμα Π8.4.3:
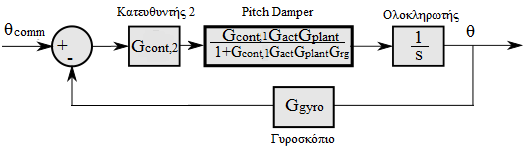
Σχήμα Π8.4.3 Ισοδύναμο δομικό διάγραμμα του συστήματος επαύξησης της διαμήκους ευστάθειας με ανάδραση των q και θ.
Αν τεθεί η ΣΜ του εσωτερικού βρόχου, δηλαδή του Pitch Damper, ως:
|
|
|
(8.48) |
|
|
|
(8.49) |
Για να «παγιδευτεί» ο πόλος που εισάγει ο ολοκληρωτής στην αρχή των αξόνων, ώστε να μην περάσει στο δεξί ημιεπίπεδο με το κλείσιμο του βρόχου, ο Κατευθυντής 2 πρέπει να είναι αναλογικός-διαφορικός (“PD”):
|
|
|
(8.50) |
Δηλαδή εισάγεται ένας μηδενιστής στον πραγματικό άξονα:
|
|
|
(8.51) |
Όταν κλείσει ο βρόχος με την ανάδραση της πρόνευσης θ, οι πόλοι μετακινούνται στον τόπο των ριζών, όπως φαίνεται στο σχήμα Π8.4.4:
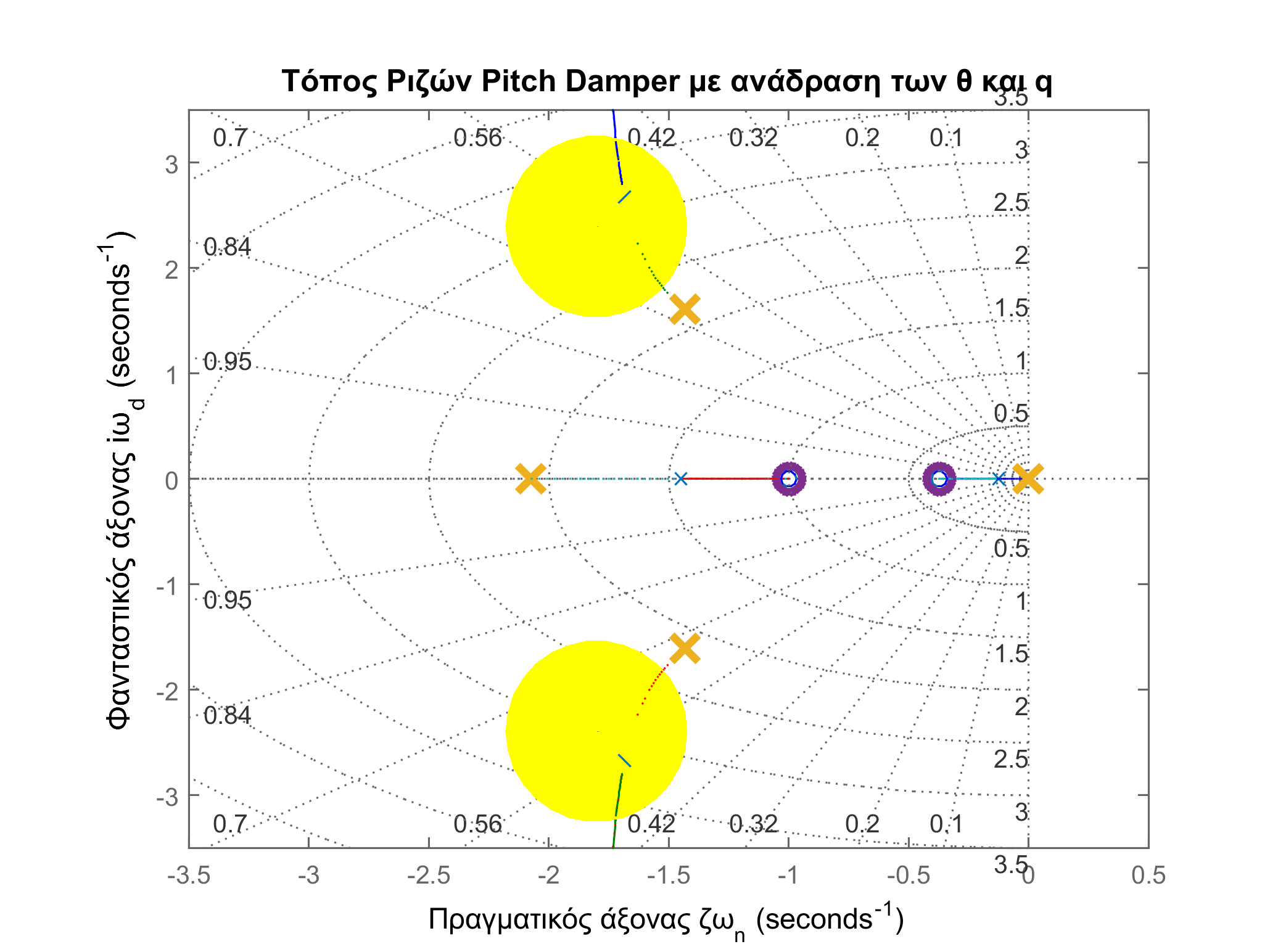
Σχήμα Π8.4.4 Τόπος ριζών του συστήματος επαύξησης της διαμήκους ευστάθειας με ανάδραση των q και θ. Μετατόπιση των πόλων στις επιθυμητές περιοχές με την επιλογή του κέρδους των κατευθυντών.
Εφόσον θεωρούνται δεδομένες και σταθερές οι ευαισθησίες των γυροσκοπίων (κέρδη Κθ, Κq), πρέπει να υπολογιστούν τα κατάλληλα κέρδη των κατευθυντών 1 και 2 όπως και η χρονική σταθερά του δεύτερου, ώστε οι κυρίαρχοι πόλοι του κλειστού βρόχου να μετατοπισθούν στις επιθυμητές περιοχές.
Αντικαθιστώντας στη χαρακτηριστική εξίσωση:
|
|
|
(8.52) |
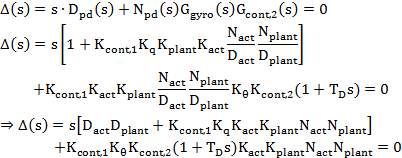
Τίθενται:
|
|
|
(8.53) |
Τότε η χαρακτηριστική εξίσωση:
|
|
|
(8.54) |
Εφόσον οι επιθυμητές θέσεις των πόλων κλειστού βρόχου είναι:
|
|
|
|
Η επιθυμητή χαρακτηριστική, θα έχει τη μορφή:
|
|
|
(8.55) |
Εξισώνοντας του συντελεστές των πολυωνύμων που προκύπτουν από τις (8.54), (8.55), προκύπτει ένα σύστημα. Προσθέτοντας στο σύστημα μια σχέση της μορφής Κ1=νK2, μπορεί να επιλυθεί δίνοντας τα κατάλληλα κέρδη και τη χρονική σταθερά.
Έστω:
|
|
|
|
Τότε η απόκριση της γωνίας θ σε είσοδο θcomm μοναδιαίας βαθμίδας, είναι αυτή του σχήματος Π8.4.4.
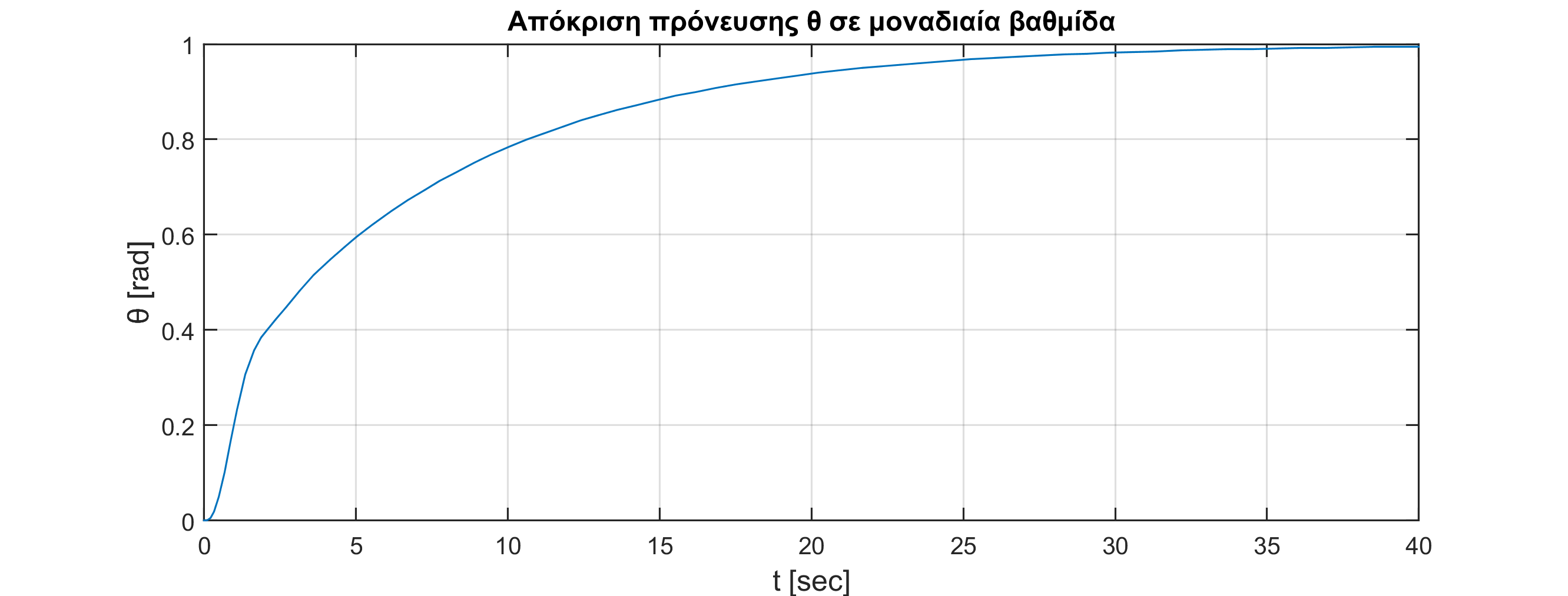
Σχήμα Π8.4.5 Απόκριση πρόνευσης σε είσοδο μοναδιαίας βαθμίδας στο σύστημα επαύξησης της διαμήκους ευστάθειας με ανάδραση των q και θ.
4.1.2. Διατήρηση ύψους πτήσης
Η διατήρηση του ύψους της πτήσης, αποτελεί μια πολύ σημαντική λειτουργία σε πολλά συστήματα αυτομάτων πιλότων. Ο έλεγχος του ύψους είναι όμοιος με τον έλεγχο του ρυθμό ανόδου-καθόδου. Με την εντολή για μηδενικό βαθμό ανόδου, το ύψος μπορεί να διατηρηθεί σταθερό.
Στα περισσότερα αεροσκάφη το ύψος ελέγχεται από το πηδάλιο ανόδου-καθόδου. Η συνάρτηση μεταφοράς για το ύψος σε σχέση με τη μεταβολή του πηδαλίου ανόδου-καθόδου μπορεί να γραφεί με τη μορφή που δίνεται με την εξίσωση (8.9), ενώ το δομικό διάγραμμα για το σύστημα αυτό φαίνεται στο σχήμα 8.16:
|
|
|
(8.56) |
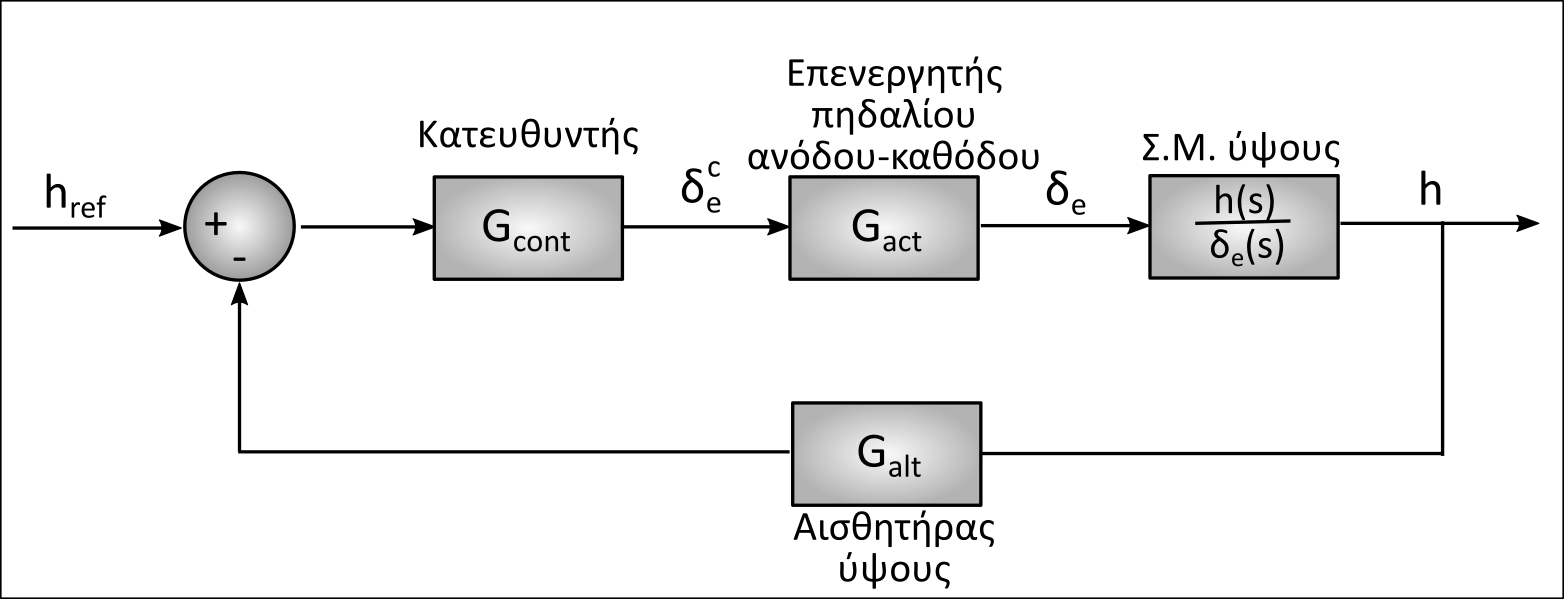
Σχήμα 8.12 Δομικό διάγραμμα ΣΑΕ διατήρησης του ύψους πτήσης.
Η χρονική καθυστέρηση που εμφανίζεται στη διαδρομή της ανάδρασης οφείλεται στο ότι τα βαρομετρικά όργανα μέτρησης ύψους που χρησιμοποιούνται στα αεροσκάφη έχουν υστέρηση κατά την ένδειξη του ύψους. Ένα άλλο τυπικό πρόβλημα που εμφανίζεται κατά τον έλεγχο του ύψους σε αεροσκάφη με χαμηλή απόσβεση στο φυγοειδές, είναι ότι το φυγοειδές οδηγείται στην αστάθεια σε πολύ χαμηλό κέρδος ανάδρασης. Το πρόβλημα αυτό δεν απαλείφεται ακόμη και όταν η καθυστέρηση του υψομέτρου γίνει αμελητέα. Για την αντιμετώπισή του εφαρμόζονται αρκετές εναλλακτικές μέθοδοι, με κύριο στόχο τη σταθεροποίηση του φυγοειδούς, όπως:
• Η πρόσθετη ανατροφοδότηση ταχύτητας, όπως φαίνεται στο σχ. 8.13.
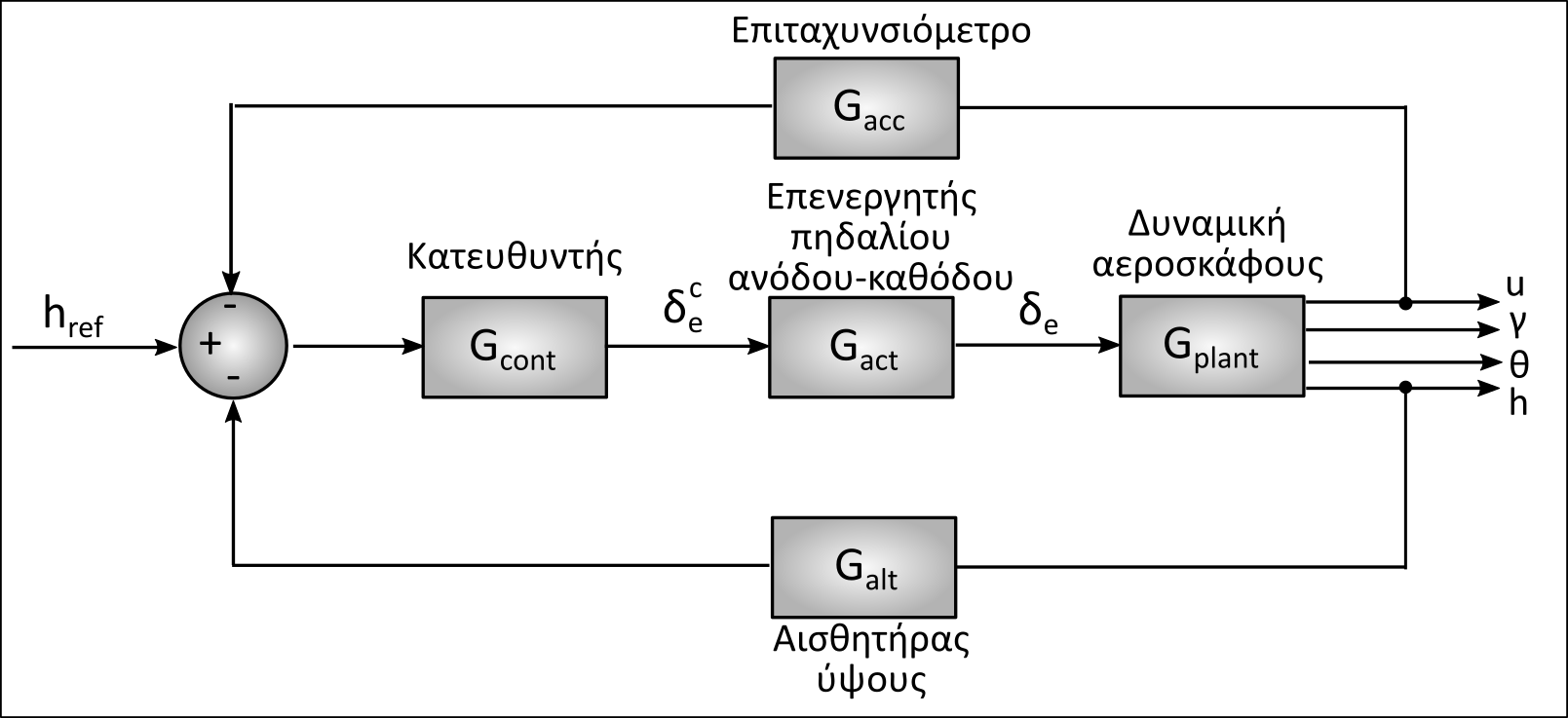
Σχήμα 8.13 Δομικό διάγραμμα ΣΑΕ διατήρησης του ύψους πτήσης με πρόσθετη ανάδραση της αξονικής ταχύτητας u.
• Η πρόσθετη ανατροφοδότηση της γωνίας και του ρυθμού πρόνευσης, όπως φαίνεται στο σχ. 8.14.
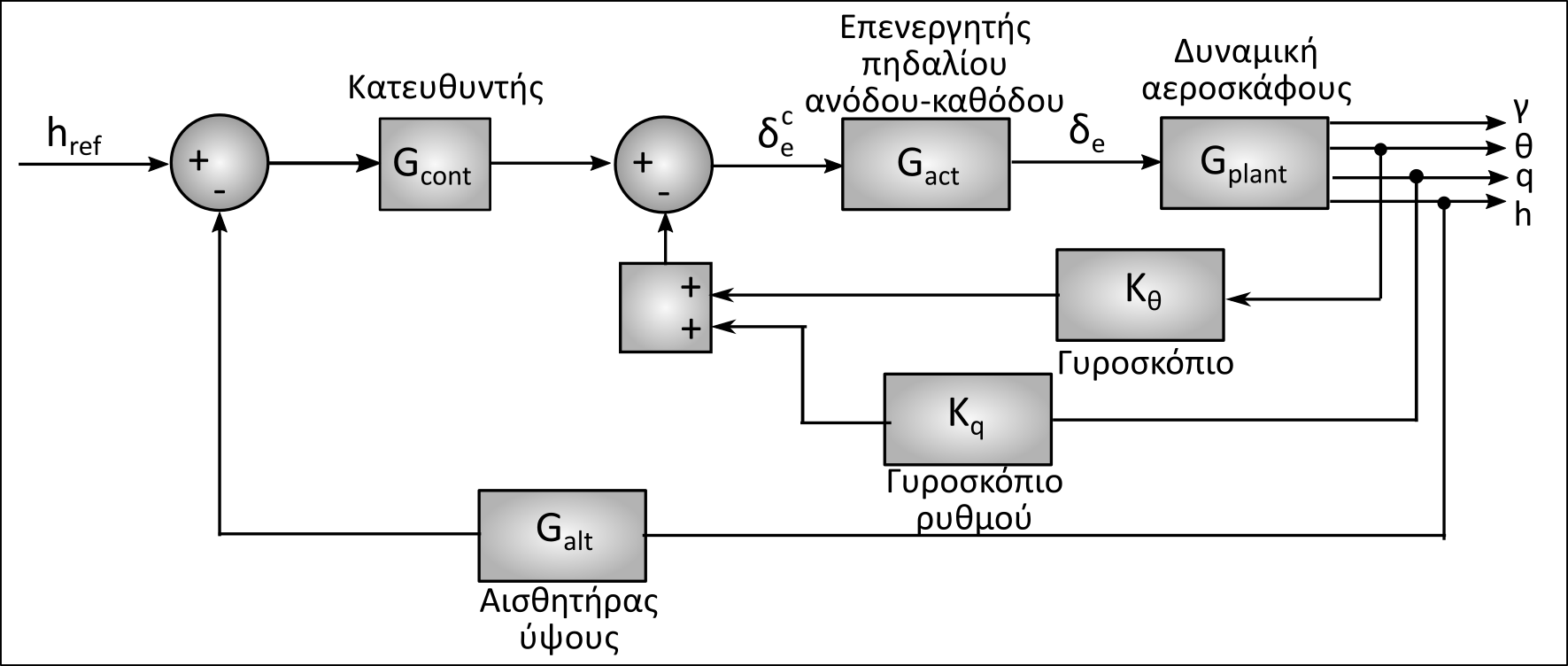
Σχήμα 8.14 Δομικό διάγραμμα ΣΑΕ διατήρησης του ύψους πτήσης με τριπλή ανάδραση.
• Η ανατροφοδότηση της κάθετης επιτάχυνσης, όπως προτάθηκε στην ενότητα 3.1.3 του κεφαλαίου 8.
Παράδειγμα 8.5.
Σε αυτό το παράδειγμα αναλύεται η κατασκευή μιας μορφής αυτομάτου πιλότου διατήρησης του ύψους h του αεροσκάφους. Χρησιμοποιούνται και εδώ τα δεδομένα για το B747-100. Αυτός ο έλεγχος είναι βασική συνιστώσα του συστήματος αυτόματης προσέγγισης του αεροσκάφους στον αεροδιάδρομο, οπότε χρησιμοποιούνται οι κατάλληλες τιμές των παραγώγων ευστάθειας και ελέγχου (παράρτημα Η.1, 1η περίπτωση).
Αρχικά θεωρείται η γενική μορφή του συστήματος που αποτυπώνεται στο δομικό διάγραμμα του σχήματος Π8.5.1.
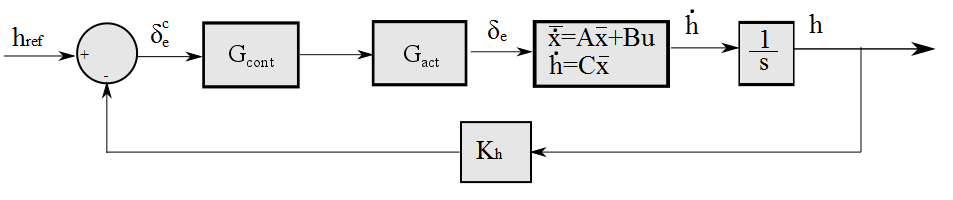
Σχήμα Π8.5.1 Δομικό διάγραμμα ΣΑΕ διατήρησης του ύψους πτήσης.
Χρησιμοποιείται το μοντέλο της προσέγγισης της μικρής περιόδου σε μορφή ΓΧΑΣ, επαυξημένο με την πρόνευση θ. Εφόσον υποτίθεται και πάλι οριζόντια και ομαλή πτήση και ως άξονες αναφοράς οι αεροδυναμικοί, ισχύει:
|
|
|
(8.57) |
Τότε ως έξοδος του χώρου κατάστασης ορίζεται ο ρυθμός μεταβολής του ύψους.
|
|
|
(8.58) |
|
|
|
(8.59) |
|
|
|
(8.60) |
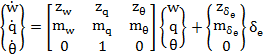
Η μορφή του χώρου κατάστασης, αντιπροσωπεύει ένα σύστημα μιας εισόδου και μιας εξόδου. Η χαρακτηριστική εξίσωση του συστήματος προκύπτει:
|
|
|
(8.61) |
Η ΣΜ μεταφοράς του ύψους h προκύπτει ολοκληρώνοντας την έξοδο του συστήματος:
|
|
|
(8.62) |
Για:
|
|
|
(8.63) |
Η ΣΜ ανοιχτού βρόχου προκύπτει ως:
|
|
|
(8.64) |
Ο τόπος ριζών του συστήματος και το πώς μετακινούνται οι πόλοι με την εφαρμογή της ανάδρασης του ύψους h, για αρνητικό κέρδος του κατευθυντή (Kc=-1), φαίνεται στο σχήμα Π8.5.2.
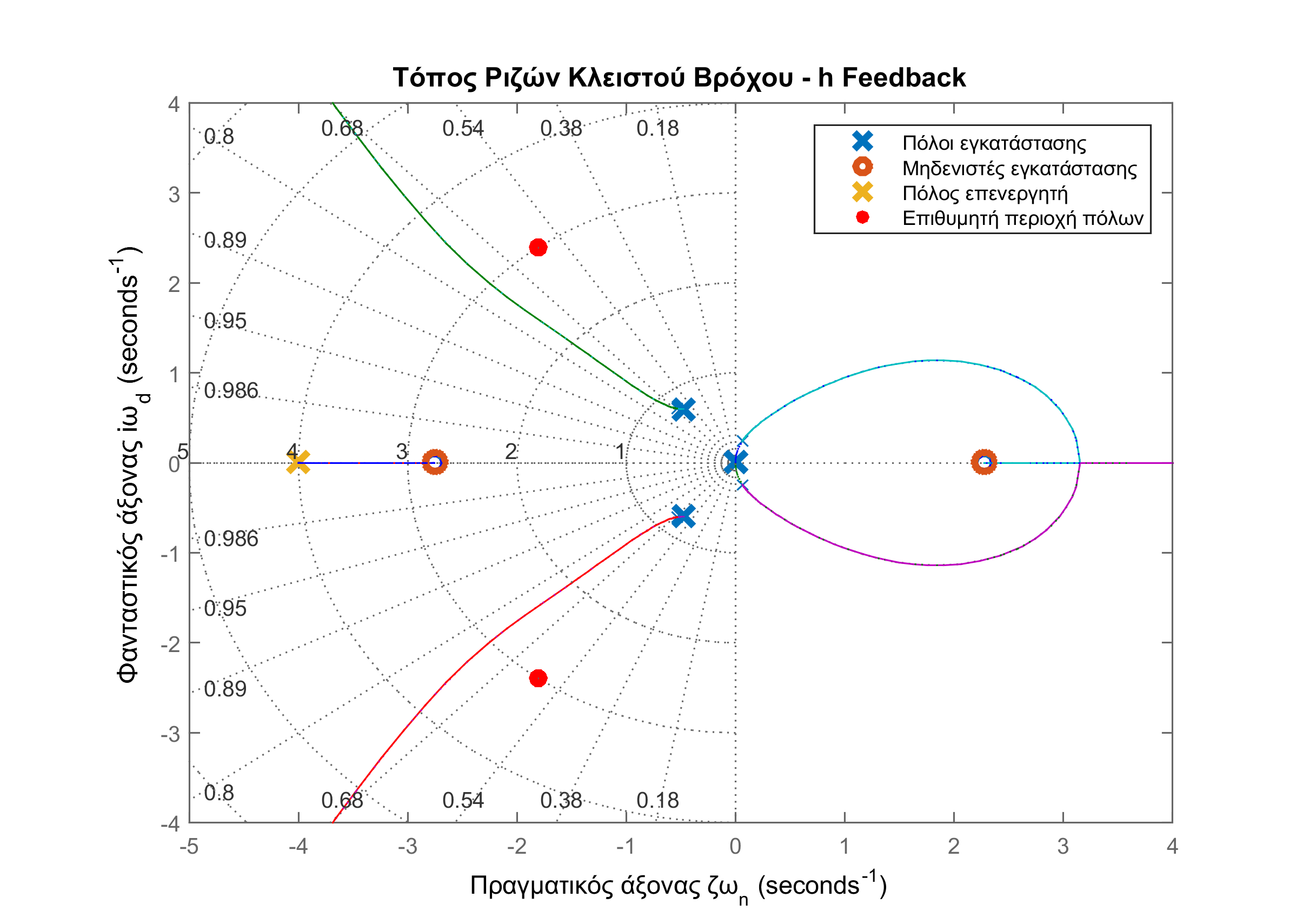
Σχήμα Π8.5.2 Τόπος ριζών της ΣΜ κλειστού βρόχου, του αυτόματου πιλότου διατήρησης του ύψους με ανάδραση του ύψους h, για αρνητικό κέρδος του κατευθυντή.
Για να επιτευχθούν τα επιθυμητά χαρακτηριστικά της μικρής περιόδου, οι επιθυμητοί πόλοι της χαρακτηριστικής της και κυρίαρχοι πόλοι του συστήματος:
|
|
|
|
Είναι εμφανές ότι οι κυρίαρχοι πόλοι δεν μπορούν να μετατοπιστούν στις επιθυμητές θέσεις χρησιμοποιώντας μόνο το κέρδος του κατευθυντή και της ανάδραση του ύψους h, καθώς οι δύο πόλοι στην αρχή των αξόνων θα κινηθούν στο δεξιό ημιεπίπεδο και το σύστημα γίνεται ασταθές.
Για τον λόγο αυτό, απαιτείται η εισαγωγή εσωτερικού βρόχου ανάδρασης. Επίσης, πρέπει ο πόλος της χαρακτηριστικής του μοντέλου που βρίσκεται στην αρχή των αξόνων, να μετατοπιστεί στο αριστερό ημιεπίπεδο αλλά κοντά στην αρχή των αξόνων, ώστε να «τραβήξει» μαζί του τον τόπο των ριζών που βρίσκεται στο δεξιό ημιεπίπεδο. Οπότε τίθεται:
|
|
|
|
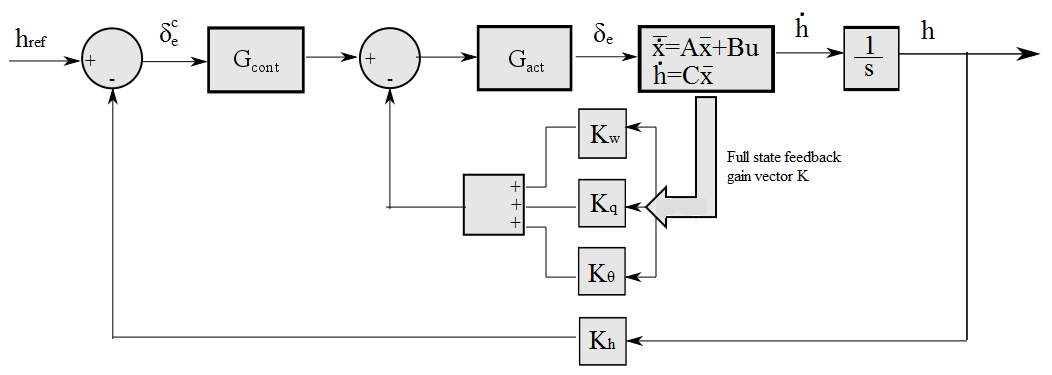
Σχήμα Π8.5.3 Δομικό διάγραμμα ΣΑΕ διατήρησης του ύψους πτήσης με πλήρη ανατροφοδότηση των μεταβλητών κατάστασης και ανάδραση του ύψους h.
Τότε η επιθυμητή χαρακτηριστική του μοντέλου γίνεται:
|
|
|
(8.65) |
Για την τοποθέτηση των πόλων στις επιθυμητές θέσεις [11], εφόσον γίνεται ανάδραση των μεταβλητών κατάστασης, πρέπει να υπολογιστεί το κατάλληλο διάνυσμα κέρδους όπως παρουσιάζεται στο παράρτημα Β.4.4.
|
|
|
(8.66) |
|
|
|
(8.67) |
όπου το κέρδος:
|
|
|
(8.68) |
Βέβαια, όπως σημειώνεται στο παράρτημα Β.4.5. απαραίτητη προϋπόθεση για την εφαρμογή της μεθόδου τοποθέτησης πόλων, είναι η ελεγξιμότητα του συστήματος. Ο πίνακας ελεγξιμότητας Q, ορίζεται ως:
|
|
|
(8.69) |
Ενώ για να είναι το σύστημα πλήρως ελέγξιμο, πρέπει να ισχύει:
|
|
|
(8.70) |
Με τη χρήση των εντολών της Matlab, “rank” και “ctrb”, υπολογίζονται:
|
|
|
|

Άρα το σύστημα είναι πλήρως ελέγξιμο και μπορεί να γίνει τοποθέτηση πόλων.
Πλέον οι εξισώσεις κατάστασης για τον κλειστό βρόγχο γίνονται:
|
|
|
(8.71) |
Τότε η χαρακτηριστική εξίσωσης του συστήματος:
|
|
|
(8.72) |
Ενώ η ΣΜ κλειστού βρόχου ως γνωστό:
|
|
|
(8.73) |
Εκτελώντας τη διαδικασία, προκύπτει το διάνυσμα του κέρδους:
|
|
|
|
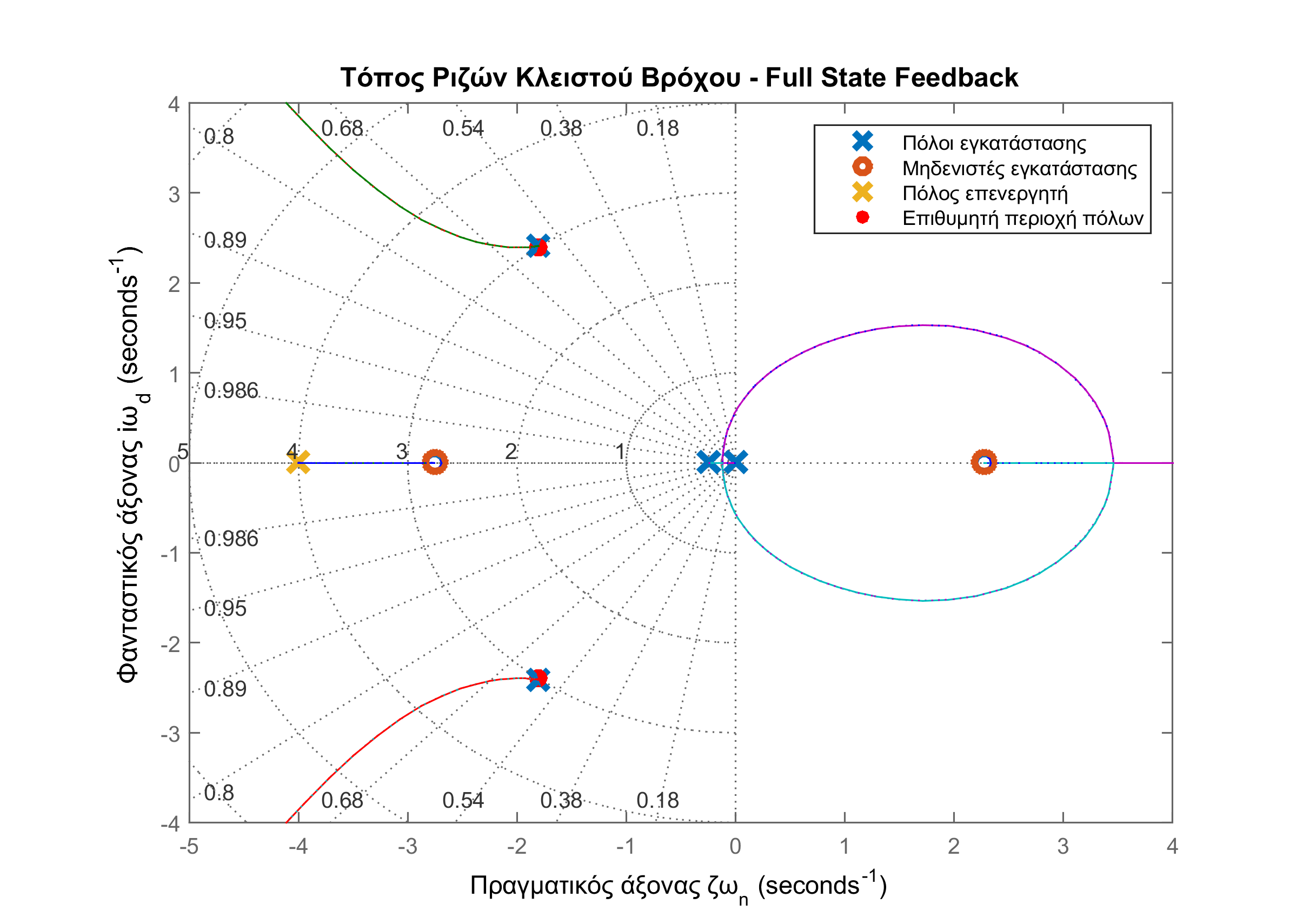
Σχήμα Π8.5.4 Τόπος ριζών ΣΑΕ διατήρησης του ύψους πτήσης με πλήρη ανατροφοδότηση των μεταβλητών κατάστασης και ανάδραση του ύψους h. Μετατόπιση των πόλων στις επιθυμητές θέσεις με την επιλογή του διανύσματος κέρδους ανάδρασης. Μικρό περιθώριο κέρδους του εξωτερικού βρόχου ανάδρασης.
Όντως οι μιγαδικοί πόλοι τοποθετήθηκαν στις επιθυμητές θέσεις. Ταυτόχρονα όμως παρατηρείται μικρό περιθώριο ευστάθειας, αφού με αύξηση του κέρδους οι πόλοι που βρίσκονται κοντά στην αρχή των αξόνων, όταν κλείσει ο βρόχος με την ανάδραση του ύψους μετακινούνται προς το δεξιό ημιεπίπεδο. Αυτό σημαίνει ότι το κέρδος ανάδρασης Κh πρέπει να είναι μικρότερο από το κρίσιμο κέρδος (περίπου Κh<10-1).
4.1.3. Διατήρηση ταχύτητας ή αριθμού Mach
Η συγκεκριμένη λειτουργία του αυτομάτου πιλότου είναι σχεδόν απαραίτητη σε όλα τα αεροσκάφη υψηλών επιδόσεων. Με τη λειτουργία αυτή ο πιλότος «παύει πια να κυνηγάει» την ταχύτητα του αεροσκάφους, ιδιαίτερα κατά την πτήση μεγάλης διάρκειας. Επίσης, αυτή η λειτουργία επιτρέπει στον πιλότο να πραγματοποιεί ευκολότερα αυτόματες προσεγγίσεις για προσγείωση. Υπάρχουν δύο μέθοδοι για τον έλεγχο της ταχύτητας, οι οποίες εξαρτώνται από τις συνθήκες πτήσης. Σε προφίλ πτήσης «μακριά και ψηλά» το σύστημα που κυρίως χρησιμοποιείται είναι ο έλεγχος των μοχλών ελέγχου των κινητήρων (μανέτες ισχύος) η διαφορετικά “auto throttle system”. Κατά την τελική προσέγγιση για προσγείωση η ταχύτητα μπορεί, εκτός από αυτό το σύστημα να ελεγχθεί και με τα αερόφρενα (speed brakes) του ίδιου του αεροσκάφους.
Το σχήμα 8.15 απεικονίζει ένα σύστημα διατήρησης της ταχύτητας χρησιμοποιώντας τις μανέτες ισχύος. Στο σύστημα auto throttle της εικόνας αυτής ο κατευθυντής (actuator) κινεί τις μανέτες. Αυτές στη συνέχεια ρυθμίζουν την τροφοδοσία καυσίμου στους κινητήρες. Οι κινητήρες αποκρίνονται με την αύξηση της ώσης. Το κέρδος μεταξύ των κινητήρων και των μανετών KT μπορεί να εκφραστεί σε lbs/in ή lbs/rad (lbs/deg) κίνησης της μανέτας. Εδώ χρησιμοποιείται το δεύτερο. Η απόκριση της ώσης του κινητήρα ως προς τις μετακινήσεις της μανέτας, μπορεί να μοντελοποιηθεί με μια υστέρηση πρώτης τάξης με συχνότητα θλάσης c rad/sec. Το αεροσκάφος αποκρίνεται σε αυτό με μια μεταβολή στην ταχύτητα σύμφωνα με τη συνάρτηση μεταφοράς της ταχύτητας ως προς την ώση.
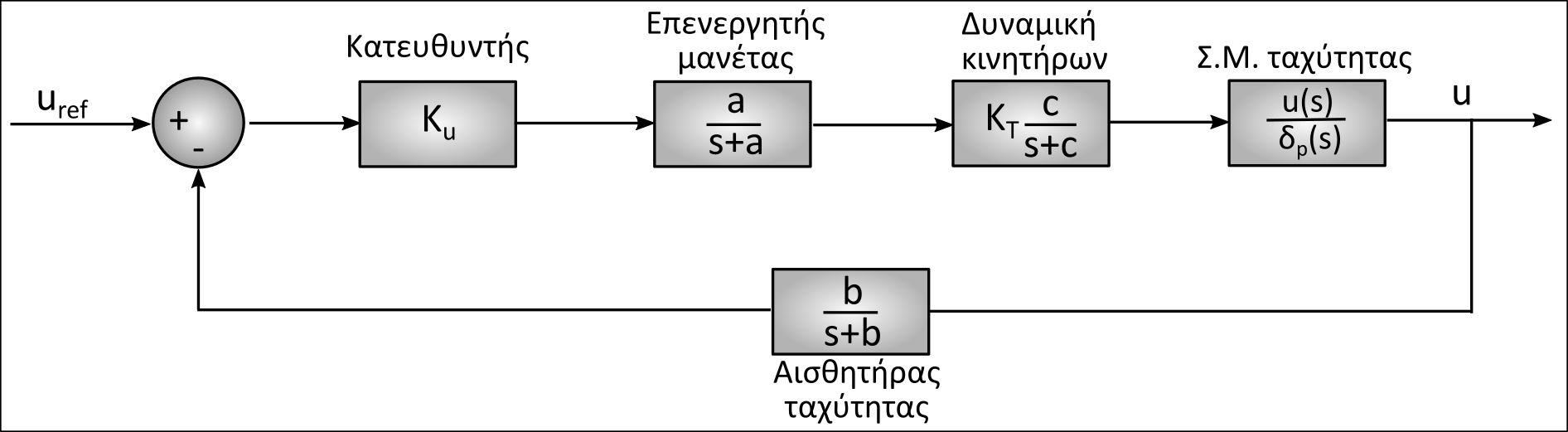
Σχήμα 8.15 Δομικό διάγραμμα ΣΑΕ διατήρησης της αξονικής ταχύτητας.
Στον βρόγχο ανάδρασης του σχήματος 8.15 εμφανίζεται μια επιπλέον υστέρηση πρώτης τάξης που οφείλεται στο σύστημα μέτρησης της ταχύτητας. Επειδή η λειτουργία αυτών των συστημάτων βασίζεται σε μεταβολές πίεσης στις στατικές οπές και στις γραμμές μεταφοράς πίεσης του συστήματος υφίσταται πάντοτε Σχήμα 8.15 κάποιου είδους υστέρηση. Το κέρδος Ku στον εμπρόσθιο βρόγχο είναι η κίνηση της μανέτας σε rad ανά ft/sec μεταβολής της ταχύτητας. Αυτό το κέρδος πρέπει να προσδιοριστεί σε σχέση με την ευστάθεια του συστήματος κλειστού βρόχου. Θα πρέπει να παρατηρηθεί ότι στα συστήματα auto throttle, όπως εκείνο που παρουσιάζεται στο σχήμα 8.15, εμφανίζεται μια υστέρηση φάσης των 270º λόγω των τριών πόλων πρώτης τάξης. Η σχετική ευστάθεια αυτών των συστημάτων πρέπει να εξετάζεται πάντοτε με μεγάλη προσοχή.
Εναλλακτικά ή/και παράλληλα, η μέτρηση της διαταραχής της ταχύτητας u μπορεί να γίνει και μέσω κατάλληλου διαμήκους επιταχυνσιομέτρου (σχήμα 8.16).
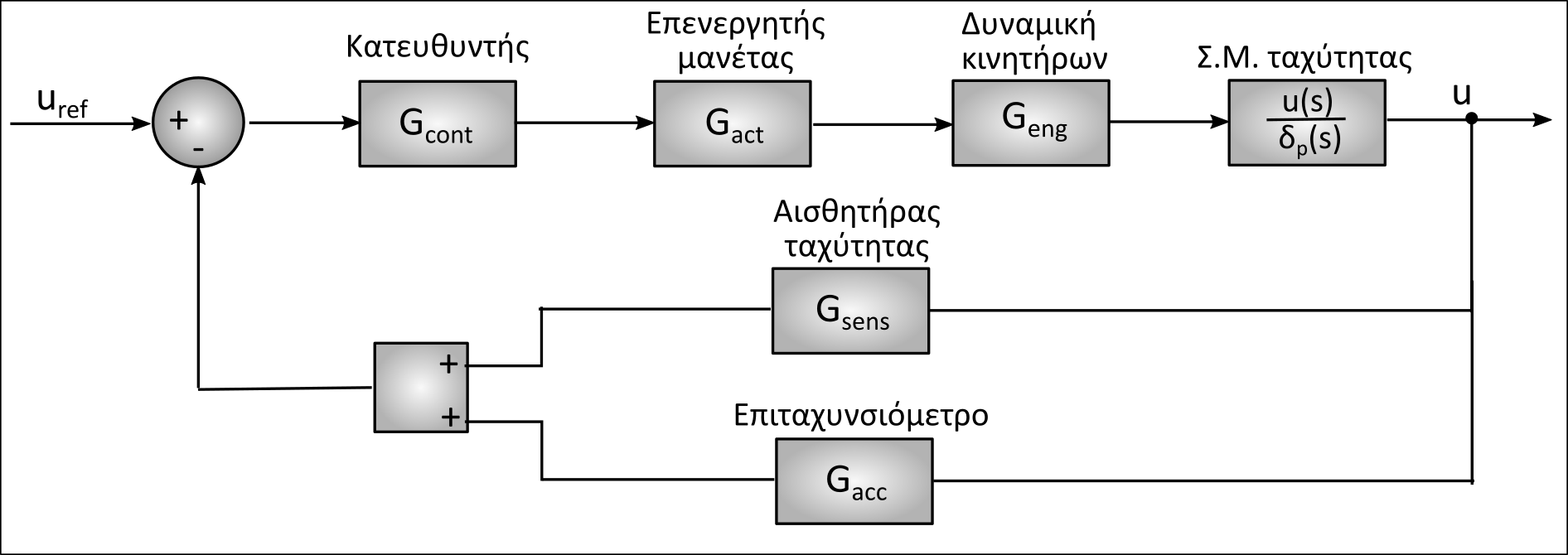
Σχήμα 8.16 Δομικό διάγραμμα ΣΑΕ διατήρησης της αξονικής ταχύτητας παράλληλη μέτρηση με επιταχυνσιόμετρο.
Με αντίστοιχη βασική δομή, αλλά και με την πρόσθετη χρήση ενός εσωτερικού βρόχου ανάδρασης του ρυθμού πρόνευσης, μπορεί να υλοποιηθεί η λειτουργία διατήρησης σταθερού αριθμού Mach.
4.2. Εγκάρσιες βασικές λειτουργίες του αυτόματου πιλότου
Καθώς τα περισσότερα αεροσκάφη, είτε είναι επιρρεπή σε σπειροειδή αστάθεια, είτε έχουν μεγάλες χρονικές σταθερές στους εγκάρσιους τρόπους ταλάντωσης, δεν εμφανίζουν ουσιαστικά την τάση επιστροφής στην αρχική γωνία διεύθυνσης και περιστροφής μετά από διαταραχές, που προέρχονται από ανεμορριπές η μετατοπίσεις των πηδαλίων ελέγχου για ελιγμούς. Έτσι, ο πιλότος είναι αναγκασμένος να ασκεί συνεχώς διορθώσεις, προκειμένου να διατηρήσει μια συγκεκριμένη πορεία. Για τον λόγο αυτό, σχεδιάστηκαν κατάλληλοι αυτόματοι πιλότοι, μια παλαιά μορφή των οποίων φαίνεται στο σχ. 8.17.
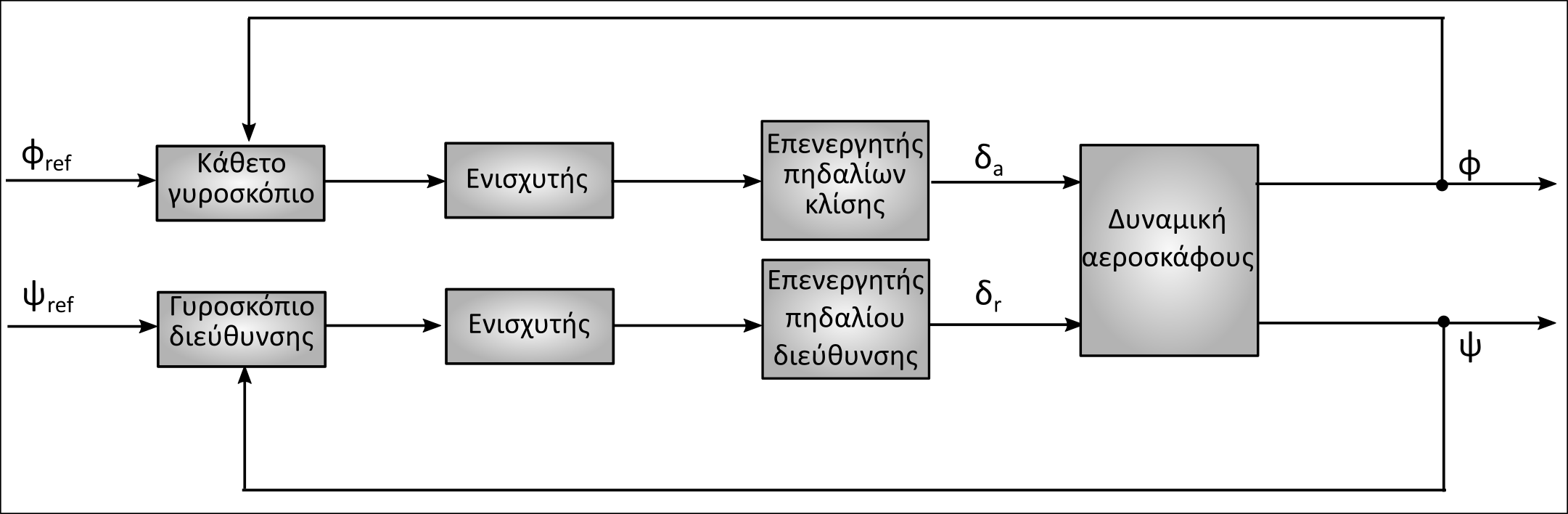
Σχήμα 8.17 Ποιοτικό δομικό διάγραμμα αυτομάτου πιλότου εγκάρσιας πλοήγησης με ταυτόχρονο έλεγχο των πηδαλίων κλίσης και εκτροπής.
Ωστόσο, αυτός ο αυτόματος πιλότος έχει περιορισμένες δυνατότητες σε ελιγμούς, ενώ παράλληλα δεν αντιμετωπίζει τη χαμηλή απόσβεση της Ολλανδικής περιστροφής. Οι σύγχρονοι αυτόματοι πιλότοι για την εγκάρσια πλοήγηση είναι αρκετά πιο σύνθετοι και απαιτούν ταυτόχρονο έλεγχο τόσο των πηδαλίων περιστροφής, όσο και διεύθυνσης, ενώ περιλαμβάνουν πολλές μορφές βρόχων εσωτερικής ανάδρασης των αντίστοιχων ρυθμών μεταβολής των γωνιών για αύξηση της δυναμικής ευστάθειας και της απόσβεσης. Στη συνέχεια της ενότητας 4.2 του παρόντος κεφαλαίου, παρατίθεται μια σύντομη επισκόπηση μερικών μορφών βασικών αυτόματων πιλότων εγκάρσιας κατεύθυνσης.
4.2.1. Διατήρηση γωνίας περιστροφής
Η πλήρης μορφή της συνάρτησης μεταφοράς της γωνίας περιστροφής φ ως προς τη μετατόπιση δa των πηδαλίων κλίσης δίδεται από τη σχέση (5.6). Μετά από μια σειρά εύλογων παραδοχών, η συνάρτηση μεταφοράς του ρυθμού περιστροφής p ως προς ως προς τη μετατόπιση δa των πηδαλίων κλίσης εκφράζεται από τη σχέση (5.23). Όπως και στην περίπτωση του αυτόματου πιλότου διατήρησης της γωνίας πρόνευσης θ στο υποκεφάλαιο 4.1.1, η άμεση ανάδραση της γωνίας φ, ακόμα και με χαμηλό κέρδος, οδηγεί το σύστημα σε αστάθεια. Εισάγοντας τον εσωτερικό βρόχο ανάδρασης του ρυθμού περιστροφής όπως φαίνεται και στο σχ. 8.18, μπορεί να χρησιμοποιηθεί υψηλότερη ευαισθησία στον εξωτερικό βρόχο, χωρίς να προκαλείται αστάθεια. Χρησιμοποιώντας το σύστημα απόσβεσης του ρυθμού περιστροφής ως εσωτερικό βρόχο, η συχνότητα του συστήματος μπορεί να ελεγχθεί μέσω των ανάλογων κερδών.
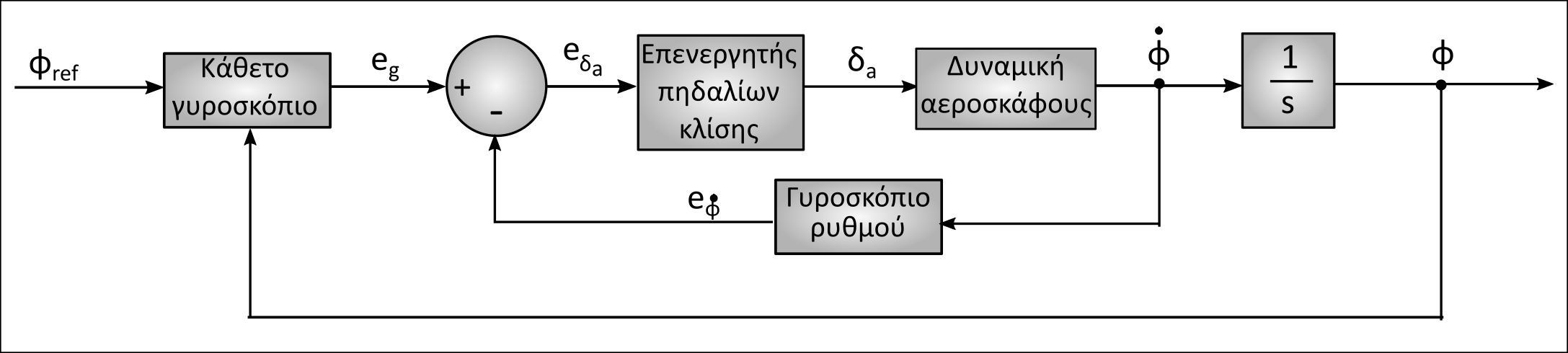
Σχήμα 8.18 Δομικό διάγραμμα ΣΑΕ διατήρησης της γωνίας περιστροφής με εσωτερική ανάδραση του ρυθμού περιστροφής.
Θα πρέπει να σημειωθεί, ότι αυτή η μορφή αυτόματου πιλότου ενδεχομένως δημιουργεί προβλήματα, όπως π.χ. διεγειρόμενες ταλαντώσεις από απότομες εντολές του πιλότου, σε περιπτώσεις όπου το κέρδος του συστήματος είναι μεγάλο και οι συνθήκες του φακέλου πτήσης είναι ακραίες, όπως π.χ. κατά τη φάση ελιγμών στην προσγείωση.
4.2.2. Συντονισμένος ελιγμός στροφής:
Ένας συντονισμένος ελιγμός στροφής είναι αυτός κατά τον οποίο η εγκάρσια επιτάχυνση ayCG, η ταχύτητα πλαγιολίσθησης v και η γωνία πλαγιολίσθησης β είναι μηδέν. Κατά τη διάρκεια μιας τέτοιας στροφής, το διάνυσμα της άνωσης L είναι κάθετο στον άξονα Οy του αεροσκάφους, όπως φαίνεται και στο σχ. 1.16.
Από την ισορροπία δυνάμεων στο σχ. 1.16, προκύπτουν οι σχέσεις:
|
|
|
|
|
|
|
(8.75) |
όπου VT είναι η εφαπτομενική συνιστώσα της ταχύτητας:
|
|
|
(8.76) |
Διαιρώντας κατά μέλη τις (Α1),(Α2) προκύπτει:
|
|
|
(8.77) |
Οι προβολές του ρυθμού περιστροφής (dΨ/dt) στους σωματόδετους άξονες του αεροσκάφους είναι:
|
|
|
(8.78) |
|
|
|
(8.79) |
Αντικαθιστώντας τη σχέση (8.77) στις σχέσεις (8.78) και (8.79) προκύπτουν οι σχέσεις:
|
|
|
|
|
|
|
(8.81) |
|
|
|
(8.82) |
Οι παραπάνω σχέσεις οδηγούν σε 3 βασικές μορφές ελέγχου της συντονισμένης στροφής:
• Ανάδραση γωνίας πλαγιολίσθησης: η δομή ενός τέτοιου συστήματος φαίνεται στο σχ. 8.19. Αν και από άποψη δομής είναι η πλέον λογική και ευθεία μορφή ελέγχου, η πρακτική της εφαρμογή συναντά προβλήματα που έχουν σχέση με την αποτελεσματικότητα και την αξιοπιστία του αισθητήρα ροής, ο οποίος μετρά την πλαγιολίσθηση.
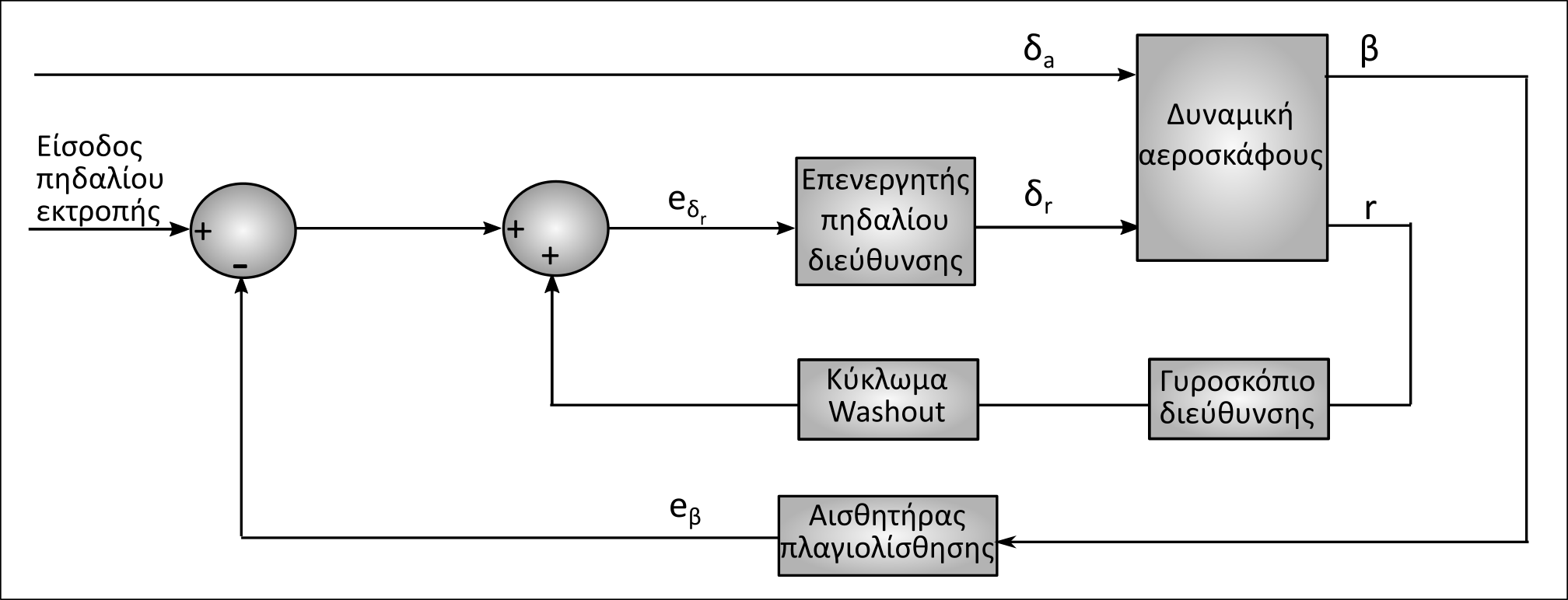
Σχήμα 8.19 Δομικό διάγραμμα ΣΑΕ για την εκτέλεση συντονισμένου ελιγμού στροφής με ανάδραση της πλαγιολίσθησης β και του ρυθμού εκτροπής r στο πηδάλιο εκτροπής.
• Ανάδραση εγκάρσιας επιτάχυνσης: η δομή ενός συστήματος αυτής της λογικής φαίνεται στο σχ. 8.20, η βασική δομή του οποίου είναι παρόμοια με αυτή του σχ. 8.19, δεδομένου ότι με ικανοποιητική προσέγγιση, η εγκάρσια επιτάχυνση ayCG είναι ανάλογη της γωνίας πλαγιολίσθησης β. Θα πρέπει να σημειωθεί, ότι και πάλι η πρακτική της εφαρμογή συναντά περιορισμούς και προβλήματα που έχουν σχέση με το αισθητήριο επιτάχυνσης, όπως απομόνωση των επιταχύνσεων που οφείλονται σε κραδασμούς λόγω ευκαμψίας της κατασκευής ή λόγω επιταχύνσεων Coriolis, διόρθωση της μέτρησης σε περίπτωση που το αισθητήριο δεν είναι τοποθετημένο στο κέντρο βάρους, κτλ.
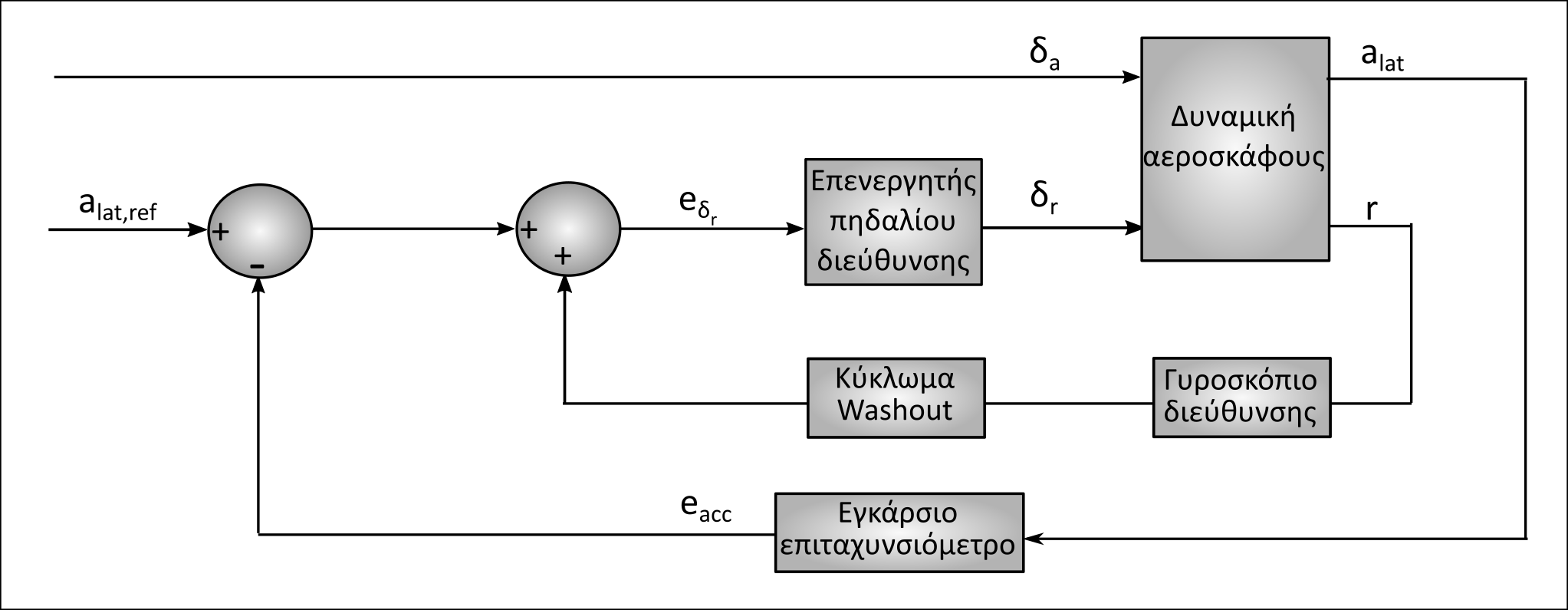
Σχήμα 8.20 Δομικό διάγραμμα ΣΑΕ για την εκτέλεση συντονισμένου ελιγμού στροφής με ανάδραση της εγκάρσιας επιτάχυνσης alat και του ρυθμού εκτροπής r στο πηδάλιο εκτροπής.
• Υπολογιζόμενος ρυθμός περιστροφής: η δομή ενός συστήματος αυτής της λογικής φαίνεται στο σχ. 8.21 και στηρίζεται στη σχέση (8.80) μεταξύ του ρυθμού εκτροπής r και της γωνίας περιστροφής φ. Η ακρίβεια αυτού τη συστήματος εξαρτάται από τη δυνατότητα του συστήματος ελέγχου για την ακριβή υλοποίηση της συνάρτησης του ημιτόνου στη σχέση (8.80).
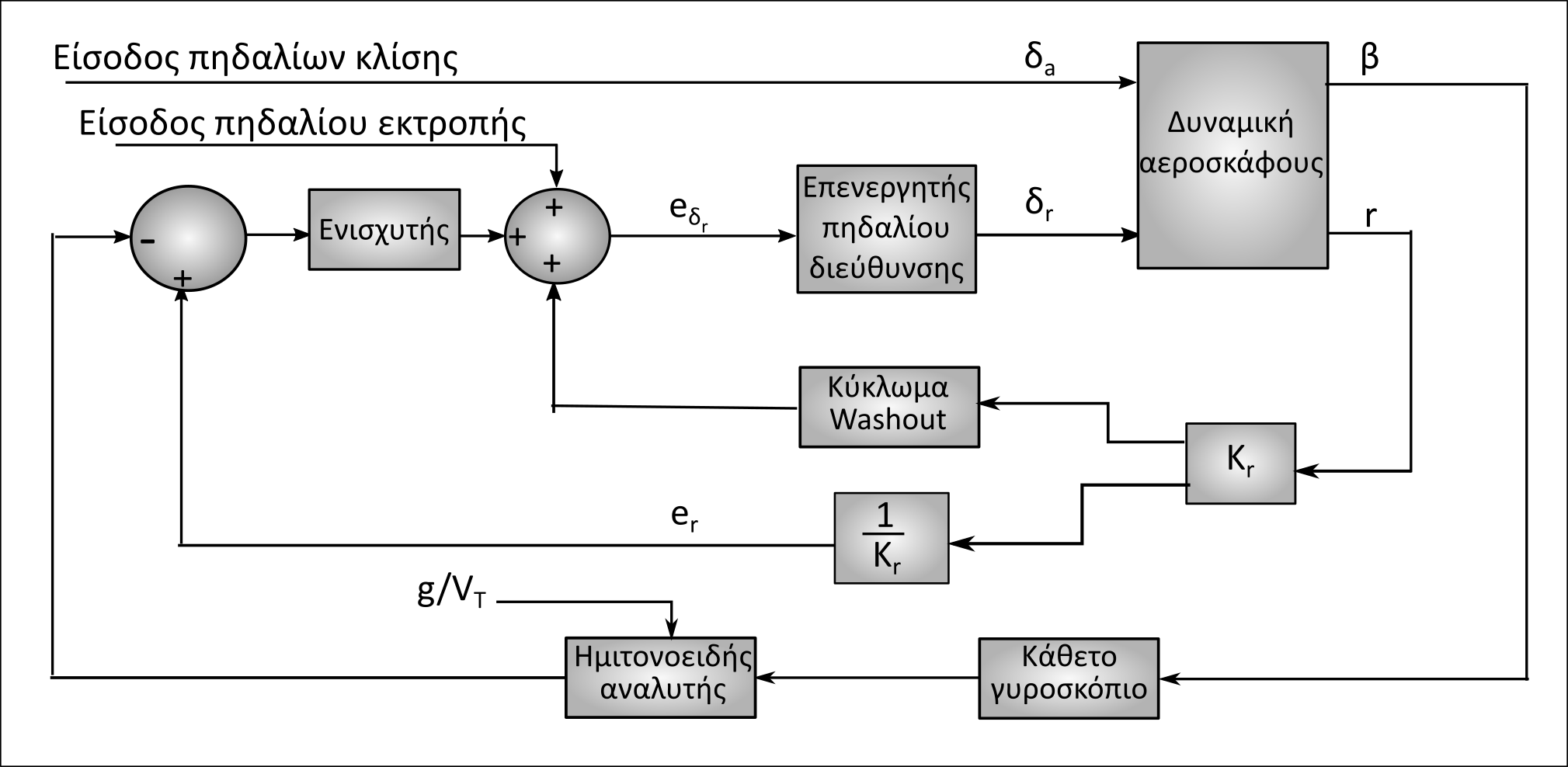
Σχήμα 8.21 Δομικό διάγραμμα ΣΑΕ για την εκτέλεση συντονισμένου ελιγμού στροφής με ανάδραση της πλαγιολίσθησης β και του ρυθμού εκτροπής r με κύκλωμα Washout και ημιτονοειδή αναλυτή, στο πηδάλιο εκτροπής.
Από τις τρεις παραπάνω μορφές ελέγχου, η ανάδραση της εγκάρσιας επιτάχυνσης είναι ίσως η συνηθέστερη, επειδή είναι η πλέον άμεση και ο αισθητήρας επιτάχυνσης δεν παρουσιάζει τόσα προβλήματα, όσο ο αισθητήρας της γωνίας πλαγιολίσθησης. Ωστόσο, η πρόοδος των υπολογιστικών συστημάτων έχει αυξήσει τις προοπτικές της ανάδρασης με υπολογιζόμενο ρυθμό περιστροφής.
4.2.3. Διατήρηση γωνίας διεύθυνσης (πορείας)
Για τη διατήρηση της διεύθυνσης, και κατά συνέπεια της πορείας του αεροσκάφους, απαιτείται συντονισμός των πηδαλίων εκτροπής και κλίσης. Μια μορφή ενός αυτόματου πιλότου για αυτή τη λειτουργία φαίνεται στο σχ. 8.22. Περιλαμβάνει εσωτερικούς βρόχους για την απόσβεση της ολλανδικής περιστροφής, του ρυθμού περιστροφής αλλά και για συντονισμένο ελιγμό περιστροφής με ανάδραση της γωνίας πλαγιολίσθησης β. Οι αλλαγές στη γωνία διεύθυνσης, μετρούνται μέσω ενός ολοκληρωτικού γυροσκοπίου του ρυθμού εκτροπής r.
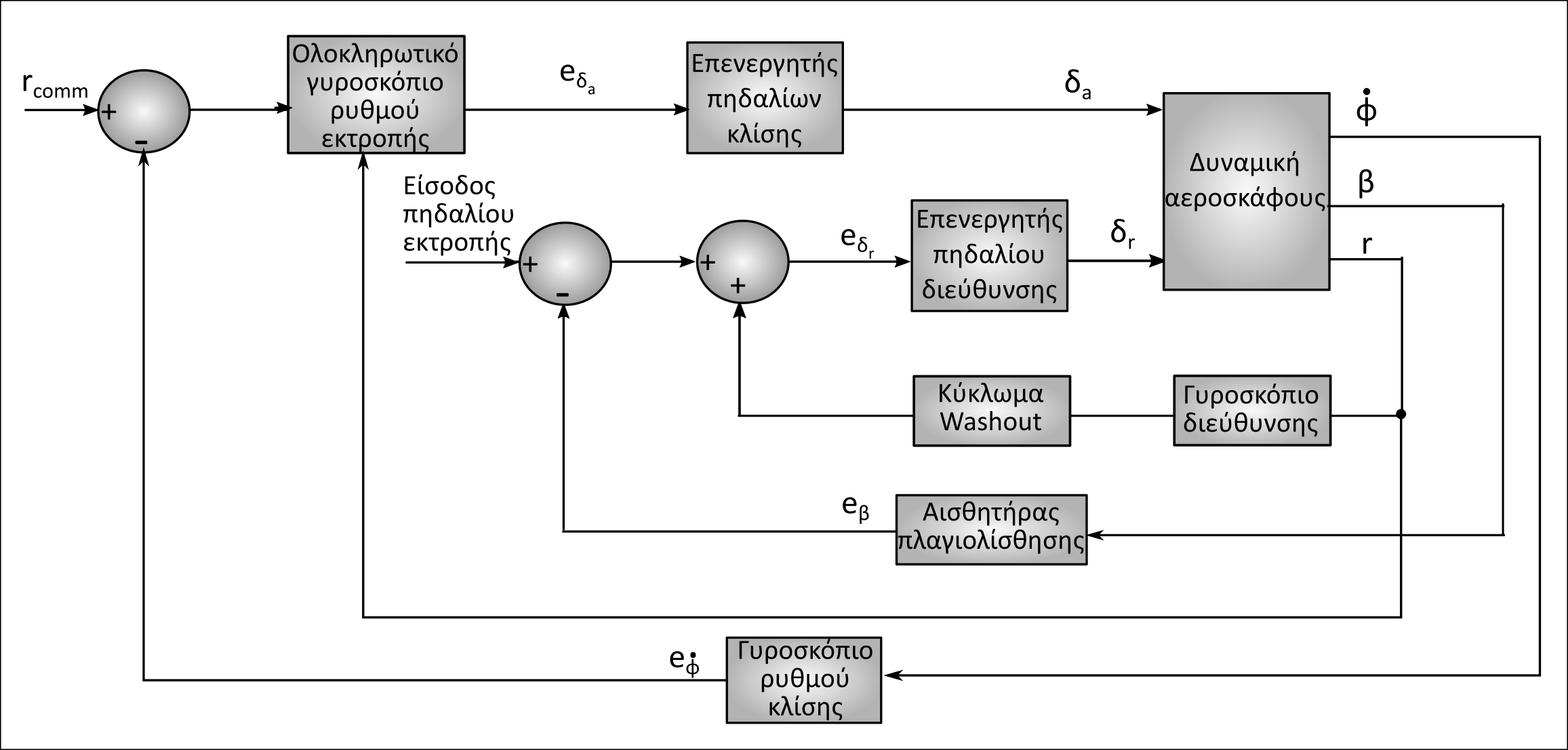
Σχήμα 8.22 Δομικό διάγραμμα ΣΑΕ διατήρησης της γωνίας πορείας με ανάδραση της πλαγιολίσθησης, του ρυθμού εκτροπής και του ρυθμού περιστροφής στον εξωτερικό βρόχο.
Το δομικό διάγραμμα μιας άλλης παραλλαγής φαίνεται στο Σχ. 8.23. H βασική του διαφορά από το σύστημα του σχήματος 8.22 είναι η χρήση ενός σήματος αναφοράς της ίδιας της γωνίας διεύθυνσης και ενός γυροσκοπίου διεύθυνσης για τη μέτρησή της. με γωνία διεύθυνσης αντί για ρυθμό. Περιλαμβάνει και πάλι εσωτερικούς βρόχους για την απόσβεση της ολλανδικής περιστροφής, του ρυθμού περιστροφής αλλά και για συντονισμένο ελιγμό περιστροφής.
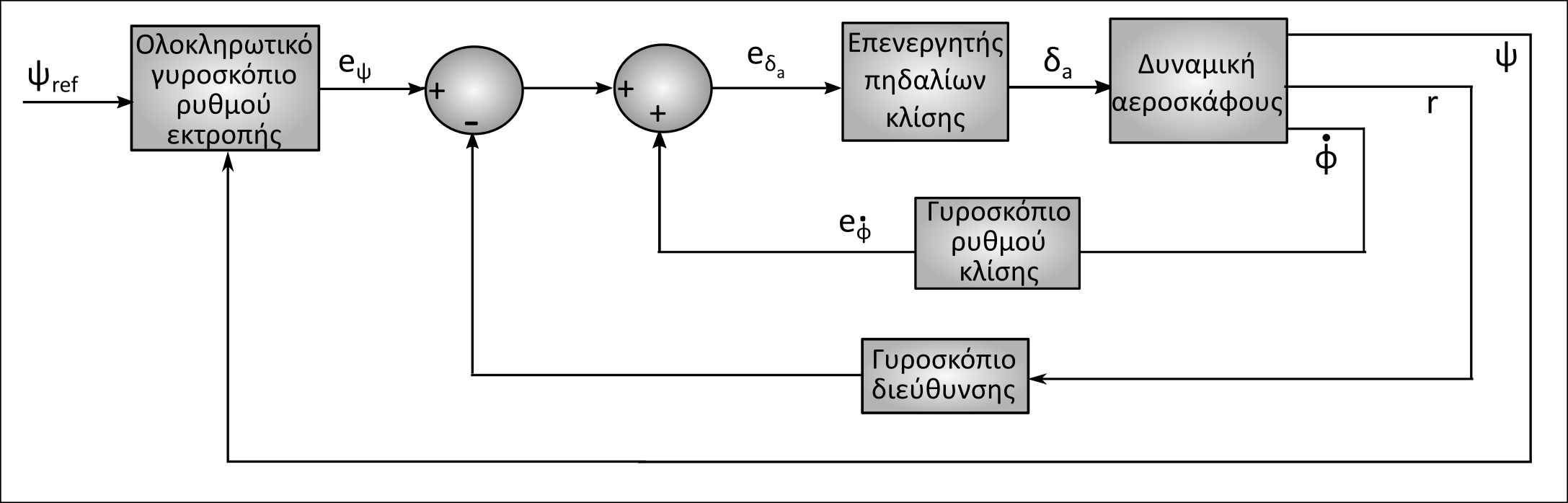
Σχήμα 8.23 Δομικό διάγραμμα ΣΑΕ διατήρησης της γωνίας πορείας με ανάδραση του ρυθμού εκτροπής, του ρυθμού περιστροφής και της ίδιας της γωνίας πορείας στον εξωτερικό βρόχο.
4.2.4. Συγχρονισμός με αυτόματους πιλότους διαμήκους δυναμικής
Κάθε φορά που ένα αεροσκάφος στρέφει διατηρώντας σταθερό ύψος και ταχύτητα, απαιτεί περισσότερη άνωση, όπως φαίνεται από τη σχέση (8.74). Για ένα ευσταθές αεροσκάφος αυτό απαιτεί περισσότερη αρνητική απόκλιση του πηδαλίου ανόδου-καθόδου (τράβηγμα του χειριστηρίου), προκειμένου το αεροσκάφος να αποκτήσει ένα ρυθμό πρόνευσης που δίδεται από τη σχέση (8.82). Επίσης, επειδή παράγεται περισσότερη οπισθέλκουσα από τη μετακίνηση των πηδαλίων περιστροφής και εκτροπής, ο πιλότος πρέπει να αυξήσει την ώση των κινητήρων. Οι σύγχρονοι αυτόματοι πιλότοι εκτελούν αυτόματα όλες αυτές τις λειτουργίες.
Επιπλέον, όπως φαίνεται και από τη σχέση (8.74), σε όλους τους ελιγμούς που περιλαμβάνουν περιστροφή, η δύναμη άνωσης μπορεί να αυξηθεί τόσο ώστε να υπερβεί την αντοχή του αεροσκάφους σε καταπόνηση. Για τον λόγο αυτό, σε όλα τα συστήματα ελέγχου περιστροφής, υπάρχουν κατάλληλα προγραμματισμένα όρια για τη μέγιστη επιτρεπτή γωνία περιστροφής.
5. Αυτόματοι πιλότοι ενόργανης προσγείωσης
Οι αυτόματοι πιλότοι ενόργανης προσγείωσης [7], περιλαμβάνουν διάφορες σύνθετες λειτουργίες, με χαρακτηριστικότερες από αυτές τη συνάντηση και διατήρηση του ίχνους του εντοπιστή της διαμήκους ευθείας συμμετρίας του αεροδιαδρόμου (ίχνος localizer), τη συνάντηση και διατήρηση του ίχνους καθόδου (glide slope), και την οριζοντίωση (flare) πριν την προσγείωση.
Βασική προϋπόθεση για τη λειτουργία τους είναι η ύπαρξη στο αεροδρόμιο μιας σειράς κατάλληλων οργάνων, με τα οποία συνεργάζονται τα όργανα πτήσης και οι τα συστήματα αυτομάτων πιλότων που βρίσκονται επί τoυ αεροσκάφους.
5.1. Λειτουργία και βασικές συνιστώσες συστήματος ενόργανης προσγείωσης (Instrumental Landing System – ILS)
Το σύστημα ενόργανης προσγείωσης (ILS-Instrumental Landing System) είναι το ευρύτερα χρησιμοποιούμενο για την καθοδήγηση αεροσκαφών κατά την προσγείωση. Η βασική του λειτουργία είναι η παροχή πληροφοριών στον πιλότο, οι οποίες του επιτρέπουν να καθοδηγήσει το αεροσκάφος προς τα κάτω διαμέσου των νεφών μέχρι το σημείο που ο πιλότος επανακτά οπτική επαφή με τον αεροδιάδρομο. Σε μια πλήρως αυτοματοποιημένη προσγείωση, ο αυτόματο πιλότος καθοδηγεί το αεροσκάφος καθ’ όλο το διάστημα μέχρι την προσγείωση και την πλήρη στάση.
Προτού αναλυθεί το σύστημα αυτόματης προσγείωσης, γίνεται μια σύνοψη των βασικών ιδεών πίσω από τον εξοπλισμό του ILS. Η καθοδήγηση του αεροσκάφους προς τον διάδρομο προσγείωσης, αφορά τον εγκάρσιο και κάθετο άξονα κίνησης του. Η δέσμη ή ακτίνα του εντοπιστή χρησιμοποιείται για την τοποθέτηση του αεροσκάφους σε κατάλληλη τροχιά που συμπίπτει με την κεντρική γραμμή του διαδρόμου προσγείωσης. Ο πομπός, εκπέμπει σε ένα εύρος συχνοτήτων 108-112 MHz. Ο σκοπός αυτής της δέσμης είναι ο εντοπισμός του αεροσκάφους σε σχέση με την κεντρική γραμμή του αεροδιαδρόμου. Αυτό επιτυγχάνεται δημιουργώντας αζιμουθιακά σήματα οδήγησης, τα οποία λαμβάνονται από τον δέκτη που βρίσκεται στο αεροσκάφος. Το αζιμουθιακό σήμα προκύπτει από την υπέρθεση ενός σήματος 90 Hz που εκπέμπεται προς τα αριστερά και ενός σήματος 150 Hz που εκπέμπεται προς τα δεξιά όπως παρουσιάζεται στο σχήμα 8.24.
Όταν το αεροσκάφος πετά κατευθείαν στη νοητή επέκταση της κεντρικής γραμμής του αεροδιαδρόμου, εντοπίζονται με την ίδια ένταση και τα δύο υπερτιθέμενα σήματα. Όμως σε περίπτωση που το αεροσκάφος αποκλίνει δεξιά ή αριστερά, το αντίστοιχο σήμα το αντίστοιχο σήμα είναι ισχυρότερο. Ο δέκτης στο πιλοτήριο, αναγνωρίζει τη διαφορά και κατευθύνει τον πιλότο μέσω μιας κατακόρυφης ράβδου στον δείκτη του ILS, να οδηγήσει το αεροσκάφος στη σωστή κατεύθυνση ως προς την κεντρική γραμμή.
Η δέσμη του ίχνους καθόδου βρίσκεται κοντά στα πρόθυρα του αεροδιαδρόμου, και εκπέμπει σε εύρος συχνοτήτων 329.3-335.0 MHz. Ο σκοπός της είναι να καθοδηγήσει το αεροσκάφος κατά ένα προαποφασισμένο ίχνος καθόδου, το οποίο τυπικά σχηματίζει μια γωνία 2.5-3° σε σχέση με τον ορίζοντα. Στο σχήμα 8.25 παρουσιάζεται η γεωμετρία της δέσμης του ίχνους καθόδου, υπερβάλλοντας την κλίση της καμπύλης για σχηματικούς λόγους. Όπως και στην περίπτωση του εντοπιστή, γίνεται υπέρθεση δύο σημάτων για τη δημιουργία ενός σήματος σφάλματος εφόσον το αεροπλάνο πετά ψηλότερα ή χαμηλότερα από το ίχνος καθόδου. Αυτό συνήθως παρουσιάζεται από μια οριζόντια ράβδο στον δείκτη του ILS μέσα στο πιλοτήριο, η οποία κινείται πάνω-κάτω σε σχέση με τον δείκτη του ίχνους καθόδου.
Οι φάροι των δεικτών χρησιμοποιούνται για τον εντοπισμό της θέσης του αεροσκάφους σε σχέση με τον διάδρομο προσγείωσης. Χρησιμοποιούνται δύο δείκτες, ο εξωτερικός και ο εσωτερικός. Ο εξωτερικός δείκτης βρίσκεται 4 ναυτικά μίλια από τον διάδρομο προσγείωσης. Ο εσωτερικός δείκτης βρίσκεται 3500 ft από τα πρόθυρα του διαδρόμου προσγείωσης.
Οι δέσμες κατευθύνονται κάθετα στο ίχνος καθόδου σε συχνότητα 75 Hz. Τα κωδικοποιημένα σήματα εντοπίζονται από ένα δέκτη του αεροσκάφους όταν αυτό πετά από πάνω τους. Όταν το αεροσκάφος περάσει τον φάρο κάποιου δείκτη, ο πιλότος ειδοποιείται μέσω ηχητικού και οπτικού σήματος. Το ηχητικό σήμα ακούγεται στο σύστημα επικοινωνίας του αεροσκάφους, ενώ το οπτικό παρουσιάζεται μέσω φωτεινών ενδείξεων στον πίνακα οργάνων.
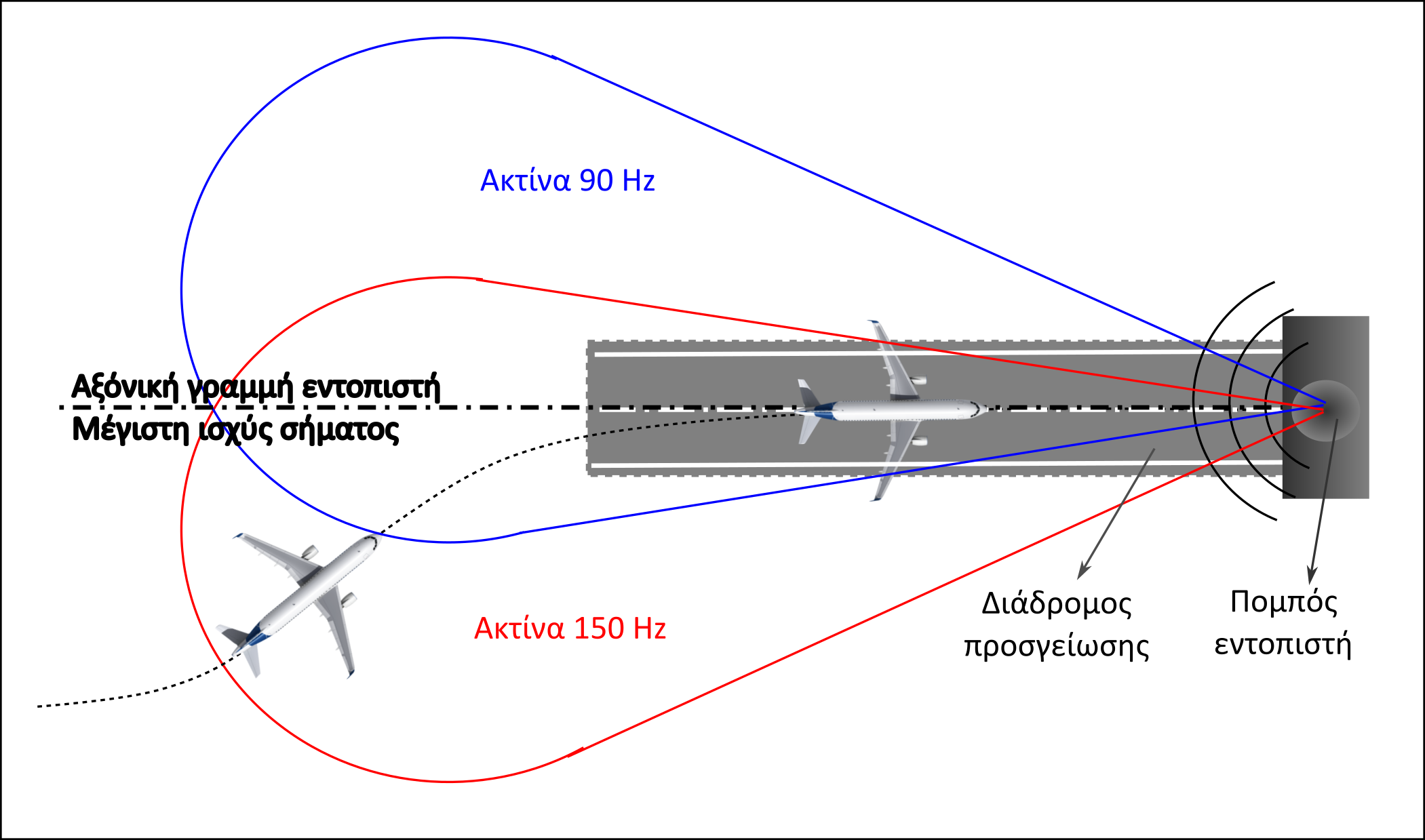
Σχήμα 8.24 Συνιστώσες και τρόπος λειτουργίας συστήματος ενόργανης προσγείωσης (ILS)
Ο πιλότος προσδιορίζει την απόσταση του αεροσκάφους του από το σημείο επαφής στον διάδρομο προσγείωσης μέσω ηλεκτρονικών σημάτων που εκπέμπονται από τους πομπούς του εξωτερικού δείκτη (outer marker) και του εσωτερικού δείκτη (inner marker). Επιπλέον, στα περισσότερα σύγχρονα αεροσκάφη η πραγματική απόσταση σε σχέση με το σημείο επαφής στον διάδρομο προσγείωσης μετράται απεικονίζεται μέσω ειδικών οργάνων μέσα στο θάλαμο διακυβέρνησης (Distance Measuring Equipment-DME).
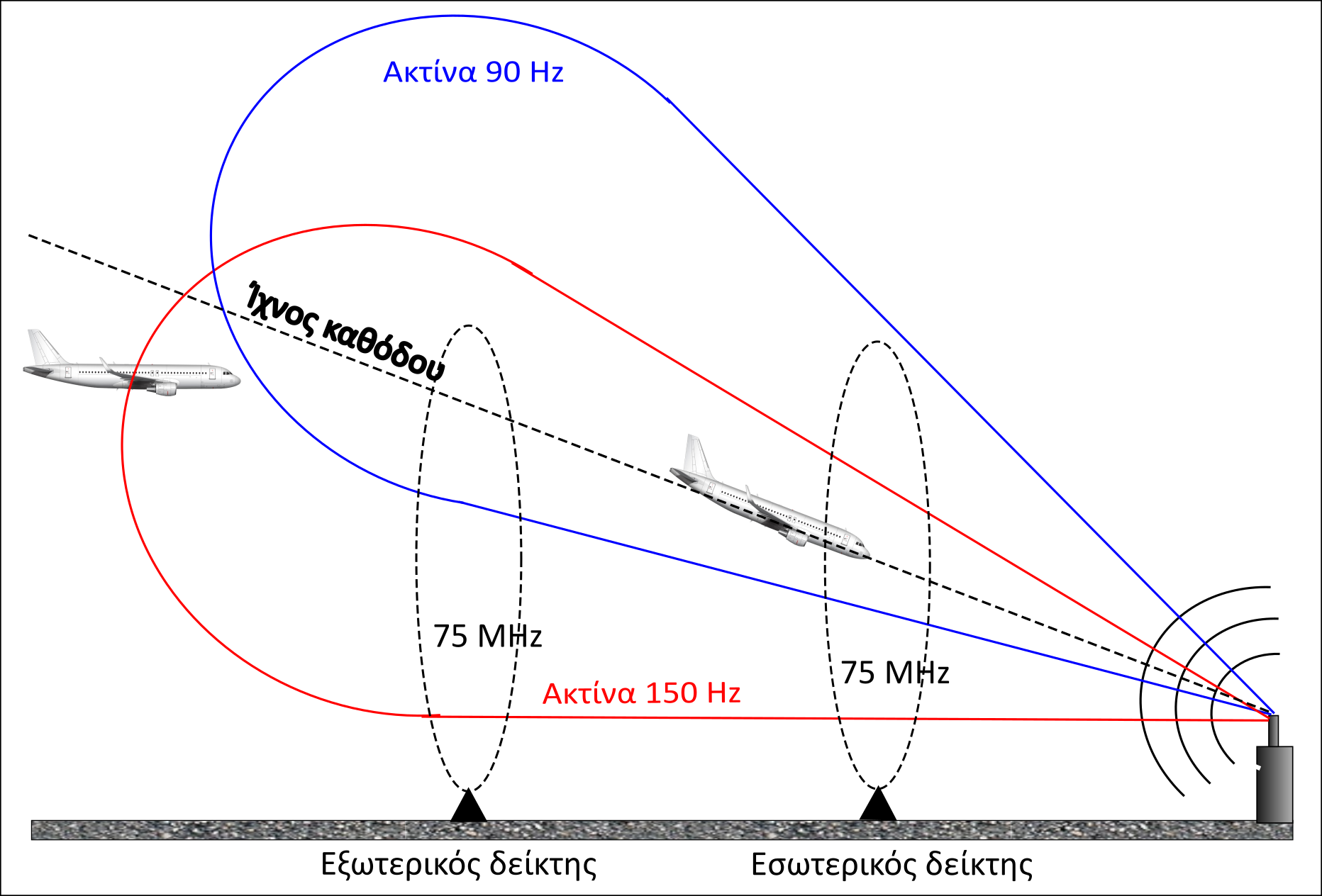
Σχήμα 8.25 Πλάγια όψη των ακτινών του πομπού και οι δείκτες ενός ILS σε σχέση με το ίχνος καθόδου.
Το κομμάτι της αυτόματης προσγείωσης αποτελείται από ένα αριθμό φάσεων οι οποίες φαίνονται στο σχήμα 8.26. Στην έναρξη της τελικής προσέγγισης που σημειώνεται με τον αριθμό 1, θεωρείται ότι αεροσκάφος καθοδηγείται στο ίχνος καθόδου και την κεντρική γραμμή του διαδρόμου προσγείωσης μέσω των συστημάτων που αναλύθηκαν στις προηγούμενες παραγράφους.
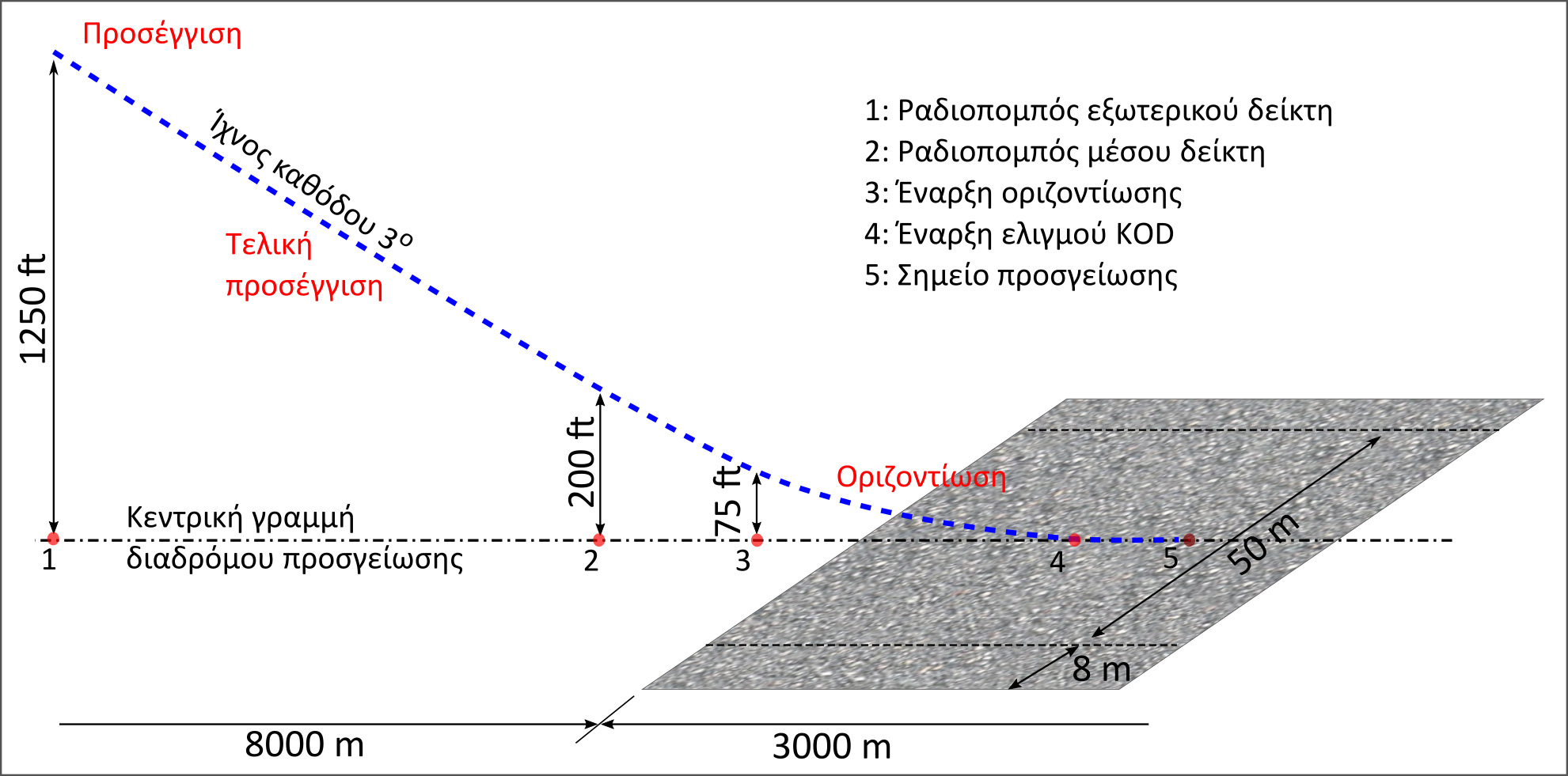
Σχήμα 8.26 Φάσεις και τυπικές αποστάσεις της τελικής προσέγγισης στον αεροδιάδρομο σε σχέση με το ίχνος καθόδου.
Ο διαχωρισμός των προσγειώσεων σε διάφορες κατηγορίες γίνεται με κριτήριο τις συνθήκες ορατότητας, οι οποίες συνοψίζονται στο σχήμα 8.27. Η κάθε κατηγορία καθορίζεται ως συνδυασμός του «ύψους λήψης απόφασης» (decision height) και του «εύρους ορατότητας αεροδιαδρόμου» (Runway Visual Range-RVR). Το ύψος λήψης απόφασης είναι το ελάχιστο επιτρεπτό όριο κάθετης ορατότητας ώστε να προχωρήσει η διαδικασία προσγείωσης. Σε αυτό το ύψος ο πιλότος είτε συνεχίζει την πτήση υπό χειροκίνητο έλεγχο μέχρι το έδαφος, είτε εκτελεί ελιγμό επαναστροφής για νέα προσπάθεια προσγείωσης ή κατεύθυνσης σε εναλλακτικό αεροδρόμιο.
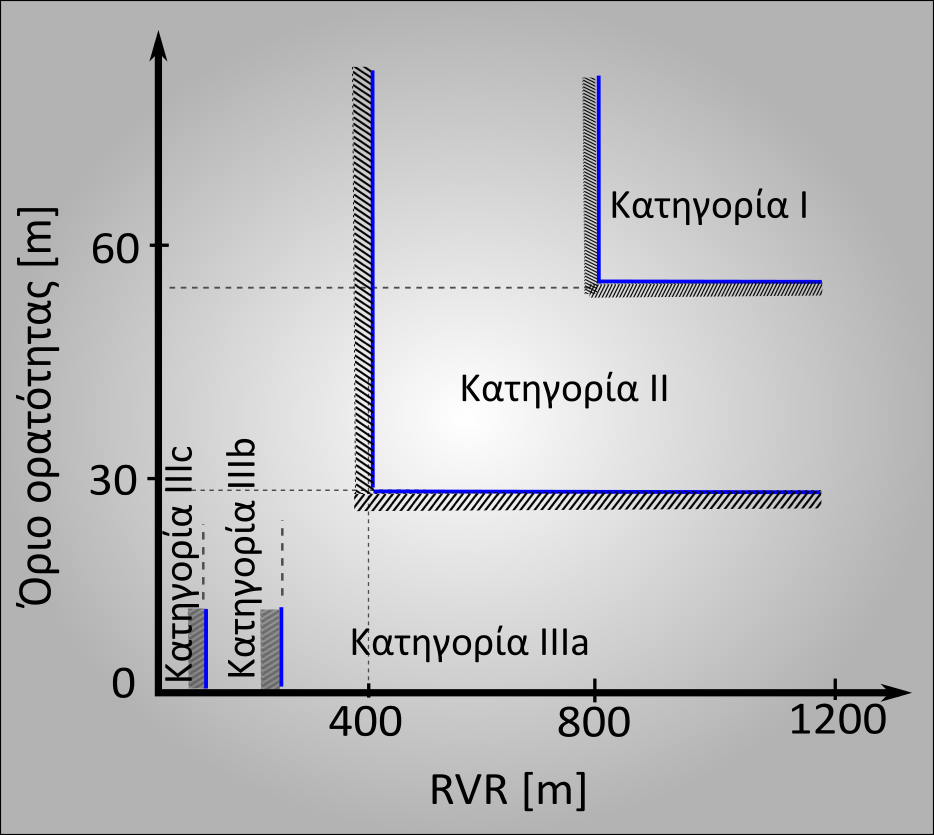
Σχήμα 8.27 Κατηγορίες προσγειώσεων βάσει των συνθηκών ορατότητας.
Αυτή η απόφαση, καθορίζεται επίσης και από τον ακριβή τύπο των ηλεκτρονικών βοηθημάτων και λειτουργιών αυτόματου πιλότου που φέρει το αεροσκάφος. Αυτές οι κατηγορίες προσέγγισης ILS είναι οι εξής:
• Κατηγορία I: ύψος βάσης νεφών 200 ft ή περισσότερο πάνω από το σημείο επαφής και ορατότητα (runway visual range-RVR) 2600 ft ή περισσότερο.
• Κατηγορία IΙ: ύψος βάσης νεφών 100 ft πάνω από το σημείο επαφής ή περισσότερο και RVR 1200 ft ή περισσότερο.
• Κατηγορία IΙΙa: μηδενικό ύψος βάσης νεφών πάνω από το σημείο επαφής και RVR 700 ft ή περισσότερο.
• Κατηγορία IIIb: μηδενικό ύψος βάσης νεφών πάνω από το σημείο επαφής και RVR 150 ft ή περισσότερο.
• Κατηγορία IIIc: μηδενικό ύψος βάσης νεφών πάνω από το σημείο επαφής και μηδενική ορατότητα RVR.
Στην κατηγορία Ι, ο πιλότος πρέπει να είναι ικανός να πετά με τα όργανα του αεροσκάφους και να ακολουθεί ένα βοήθημα (όπως για παράδειγμα το ILS) έως τα 200 ft πάνω από το έδαφος με ικανοποιητική ασφάλεια. Για τους αυτόματους πιλότους που χρησιμοποιούνται στις προσεγγίσεις κατηγορίας Ι, η εταιρεία κατασκευής πρέπει να επιδείξει ότι μια βλάβη του συστήματος που συμβαίνει στα 200 ft και ακολουθείται από χειροκίνητη ανάληψη ελέγχου του αεροσκάφους, δεν θα φέρει σε κίνδυνο την πτήση. Επίσης, στην κατηγορία Ι, εφόσον δεν επιτευχθεί οπτική επαφή με τον διάδρομο προσγείωσης στα 200 ft, πρέπει να πραγματοποιηθεί επανακύκλωση (go-around) του αεροσκάφους.
Στην κατηγορία ΙΙ απαιτείται ειδική εκπαίδευση για το πλήρωμα του αεροσκάφους, καθώς και για τους τεχνικούς που συντηρούν το σύστημα. Επίσης, απαιτείται ο εφοδιασμός του αεροσκάφους με μια λίστα από ειδικά όργανα. Διάφορα Ελληνικά αεροδρόμια είναι εφοδιασμένα με αυτό το σύστημα και διάφορες Ελληνικές Αεροπορικές εταιρίες επιχειρούν με αυτόν τον τρόπο.
Στην κατηγορία ΙΙΙ επικρατούν ακόμα πιο αυστηροί κανόνες για την εκπαίδευση των πληρωμάτων και για τα ειδικά όργανα που πρέπει να είναι εφοδιασμένο το αεροσκάφος. Σε αυτή την κατηγορία θεωρείται απαραίτητη η ύπαρξη τριπλού συστήματος ελέγχου πτήσης, που πρέπει να περιλαμβάνει τη λειτουργία της αυτόματης οριζοντίωσης πριν από την προσγείωση.
Στην κατηγορία IIIa μπορεί να πραγματοποιηθεί αυτόματη προσγείωση με τον πιλότο να αναλαμβάνει το χειροκίνητο έλεγχο του αεροσκάφους αμέσως μετά την προσγείωση. Στην κατηγορία IIIb μπορεί να πραγματοποιηθεί αυτόματη προσγείωση και διαδρομή του αεροσκάφους μετά την προσγείωση μέσα στο διάδρομο με τον πιλότο να αναλαμβάνει τον χειροκίνητο έλεγχο του αεροσκάφους κατά την τροχοδρόμηση για την πίστα. Στην κατηγορία ΙΙΙc όλες οι διαδικασίες εκτελούνται αυτόματα. Διεθνώς, υπάρχουν αρκετά αεροδρόμια με δυνατότητα προσγείωσης CATIIIb.
Θα πρέπει να σημειωθεί, ότι υπάρχουν και άλλοι τρόποι για τη δημιουργία ιχνών προσέγγισης εκτός από τα ραδιοκύματα του ILS. Μια πρόσφατη σχετικά μέθοδος με μεγάλες προοπτικές εφαρμογής είναι η χρήση του GPS (Global Positioning System) ενός συστήματος που χρησιμοποιεί αρκετούς δορυφόρους για να παρέχει τη γεωγραφική θέση μιας συσκευής στο έδαφος ή στον αέρα. Το μεγαλύτερο πλεονέκτημα τη μεθόδου είναι ότι δεν απαιτείται η ύπαρξη επίγειου εξοπλισμού.
5.2. Διατήρηση του ίχνους καθόδου
Βασική προϋπόθεση για τη λειτουργία του είναι να διαθέτει το αεροσκάφος κατάλληλα συστήματα αυτόματων πιλότων, τα οποία τουλάχιστον περιλαμβάνουν ένα σύστημα ελέγχου της γωνίας πρόνευσης όπως και ένα σύστημα ελέγχου της ταχύτητας. Το σχήμα 8.28 περιγράφει τη γεωμετρία του ίχνους πτήσης για ένα τέτοιο σύστημα, ενώ ισχύουν τα ακόλουθα:
• Η κεραία λήψης του αεροσκάφους βρίσκεται στο Κέντρο Βάρους του.
• Το Κέντρο Βάρους μετακινείται κατά μήκος του ίχνους καθόδου.
• Η γωνία σφάλματος Γ του ίχνους καθόδου ανιχνεύεται από το δέκτη του ίχνους καθόδου που βρίσκεται πάνω στο αεροσκάφος.
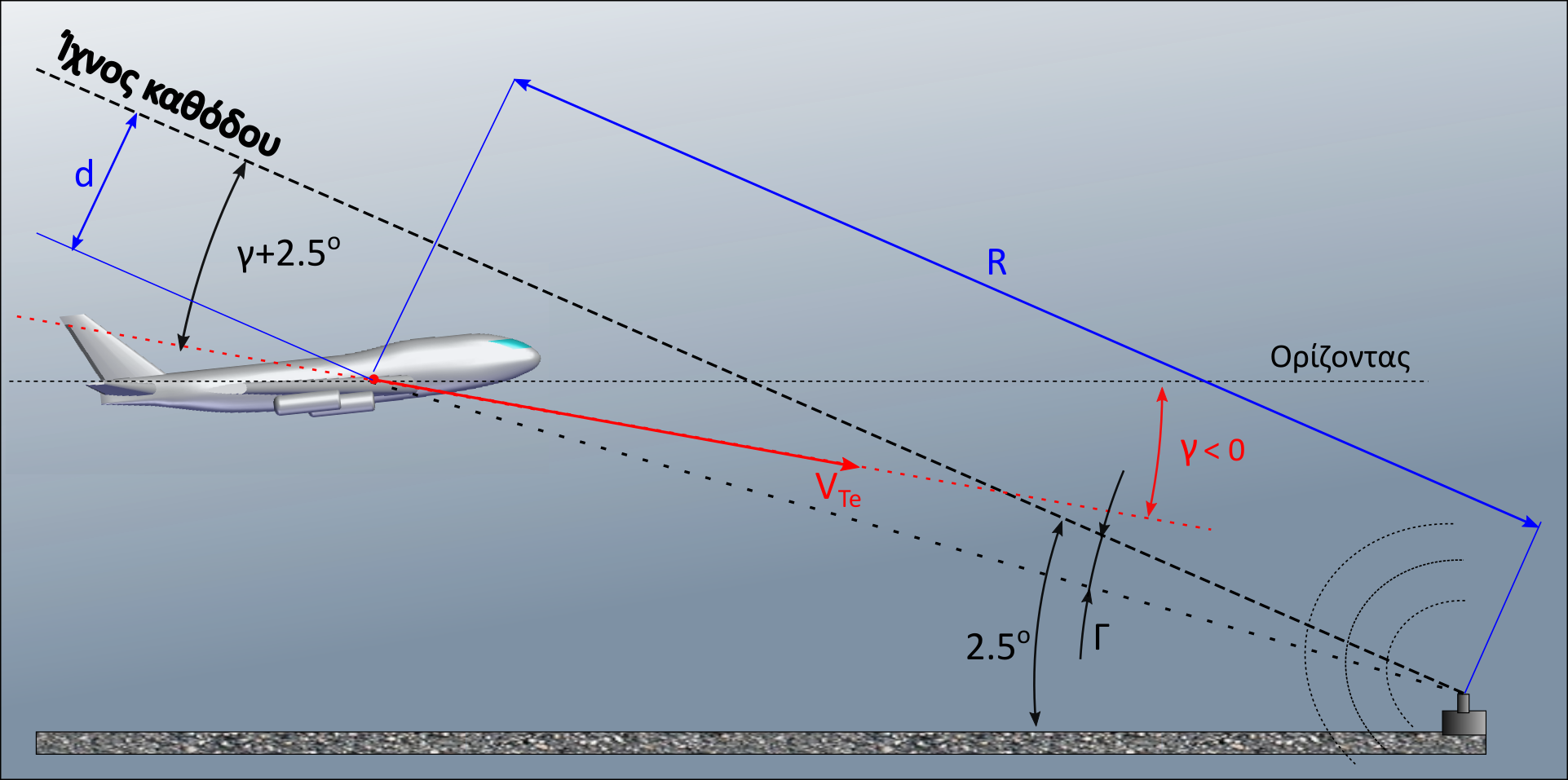
Σχήμα 8.28 Γεωμετρία ίχνους πτήσης για συστήματα διατήρησης του ίχνους καθόδου.
Η ταχύτητα με την οποία το αεροσκάφος προσεγγίζει το ίχνος καθόδου κάτω από τον έλεγχο του συστήματος ελέγχου της στάσης του δίνεται από τη σχέση:
|
|
|
(8.83) |
Η απόσταση d από το ΚΒ (κεραία του συστήματος) έως το ίχνος καθόδου βρίσκεται με την ολοκλήρωση της 8.83, η οποία στο πεδίο συχνότητας s οδηγεί στη σχέση:
|
|
|
(8.84) |
Η γωνία σφάλματος Γ του ίχνους καθόδου σχετίζεται με το d και με την απόσταση R σύμφωνα με τη σχέση :
|
|
|
(8.85) |
Μετά την εύρεση των παραπάνω γεωμετρικών σχέσεων, μπορεί να σχεδιασθεί ένα βασικό δομικό διάγραμμα για το σύστημα ελέγχου του ίχνους καθόδου, το οποίο φαίνεται στο σχήμα 8.29. Η παρουσία του συζεύκτη του ίχνους καθόδου (glideslope coupler) στο κύκλωμα, είναι για να εισαχθεί στον αυτόματο πιλότο το σήμα του σφάλματος, που δημιουργείται από την αφαίρεση του σήματος του ίχνους καθόδου (λαμβάνεται από τον δέκτη στο αεροσκάφος) από το σήμα αναφοράς. Το σφάλμα αυτό δίδει κατάλληλες εντολές ελέγχου στο συνολικό συνδυασμένο σύστημα του αεροσκάφους με τους επιμέρους αυτόματους πιλότους που περιλαμβάνει, όπως π.χ. οι αυτόματοι πιλότοι ελέγχου της θέσης πρόνευσης και της ταχύτητας του αεροσκάφους.
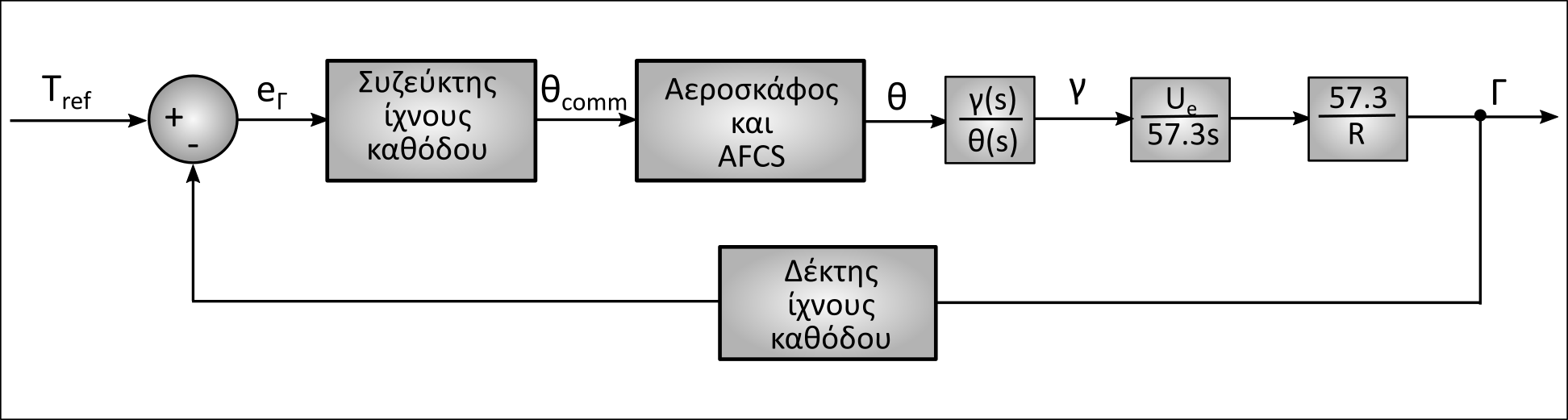
Σχήμα 8.29 Δομικό διάγραμμα ΣΑΕ διατήρησης του ίχνους καθόδου.
Η μεταβολή στη γωνία του ίχνους πτήσης γ προκαλεί μια μεταβολή στη γωνία σφάλματος του ίχνους καθόδου Γ η οποία ανιχνεύεται από τον δέκτη του ίχνους καθόδου και ανατροφοδοτείται στον συζεύκτη (coupler). Το εύρος ζώνης συχνοτήτων του δέκτη θεωρείται πολύ μεγάλο σχετικά με εκείνα των άλλων υποσυστημάτων. Επομένως ο δέκτης του ίχνους καθόδου θεωρείται ως καθαρό κέρδος. Η συνάρτηση μεταφοράς της σύζευξης συνήθως παίρνει τη μορφή του λεγόμενου δικτύου «αναλογικού αθροίσματος» (proportional plus network) με την ακόλουθη συνάρτηση μεταφοράς (TTF):
|
|
|
(8.86) |
όπου Kc είναι το κέρδος της σύζευξης.
Ένα πρόβλημα το οποίο σχετίζεται με τους βρόχους τήρησης του ίχνους καθόδου που απεικονίζονται στο σχήμα 8.29, είναι το γεγονός ότι η απόσταση R γίνεται μικρότερη, καθώς το αεροσκάφος προσεγγίζει τον διάδρομο προσγείωσης. Καθώς αυτή η απόσταση ελαττώνεται, το συνολικό κέρδος του βρόχου καθίσταται πολύ μεγάλο για σταθερό Kc. Για να αντιμετωπισθεί πιθανή αστάθεια, απαιτείται συχνά κάποιο μέσο μέτρησης της απόστασης αυτής, ώστε να ρυθμίζεται το κέρδος του συζεύκτη, καθώς το αεροσκάφος προσεγγίζει τον διάδρομο. Αυτό μπορεί να γίνει μέσω ειδικών οργάνων μέσα στο αεροσκάφος (Distance Measuring Equipment-DME), τα οποία μετρούν την πραγματική απόσταση σε σχέση με το σημείο επαφής στον διάδρομο προσγείωσης.
Σε παλαιότερους αυτόματους πιλότους το κέρδος μειωνόταν από ένα ρολόι το οποίο ξεκινούσε τη μέτρηση του χρόνου όταν το αεροσκάφος ήταν πάνω από τον εξωτερικό δείκτη. Ένας άλλος τρόπος είναι η πρόσθεση κάποιου είδος αντιστάθμισης στο σύστημα. Οι περισσότεροι αυτόματοι πιλότοι που έχουν την ικανότητα για τήρηση του ίχνους καθόδου-ικανότητα εκτέλεσης αυτόματης διαδικασίας ILS, είναι εφοδιασμένοι με αυτό που ονομάζεται λειτουργία συνάντησης και τήρησης του ίχνους καθόδου.
Ότι έχει συζητηθεί έως τώρα, περιλαμβάνει μόνο τη λειτουργία τήρησης πάνω στο ίχνος καθόδου. Το σχήμα 8.30 απεικονίζει το τυπικό ίχνος πτήσης που θα προκύψει εφόσον ο αυτόματος πιλότος τεθεί στη λειτουργία συνάντησης και τήρησης στο ίχνος καθόδου του ILS.
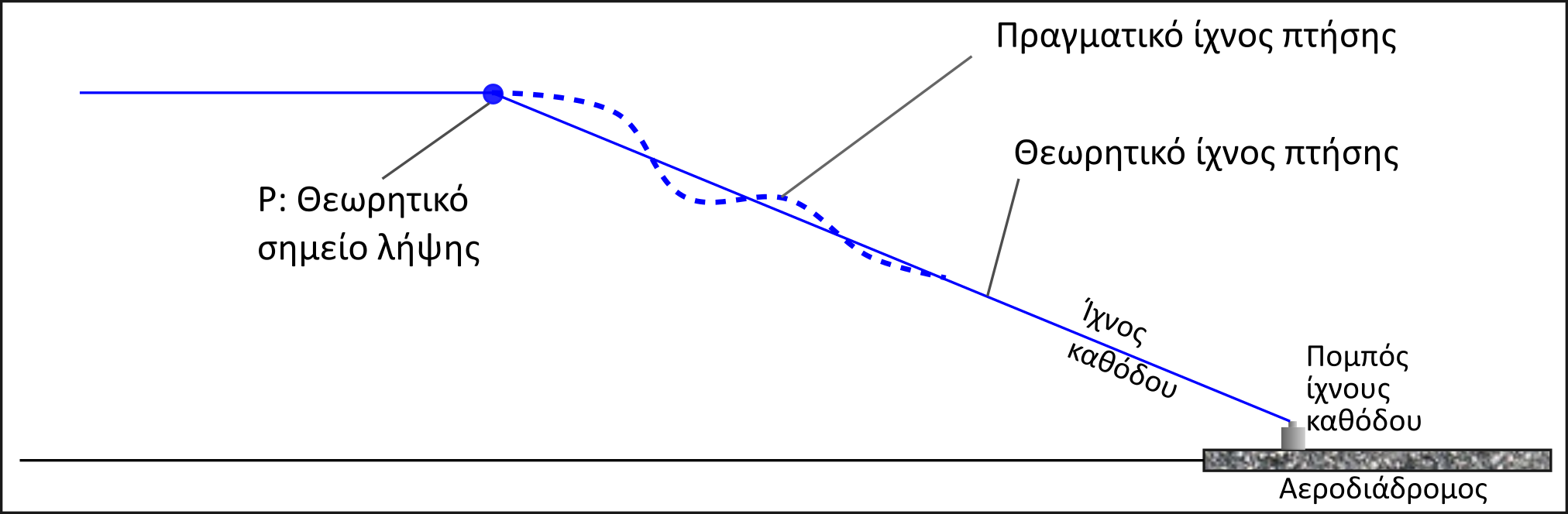
Σχήμα 8.30 Τυπικό ίχνος πτήσης κατά τη λειτουργία αυτόματου πιλότου συνάντησης και τήρησης του ίχνους καθόδου του ILS.
Στο σημείο συνάντησης P του αεροσκάφους με την ευθεία του ίχνους καθόδου, ο αυτόματος πιλότος κανονικά θα χρησιμοποιούσε το μέγιστο των δυνατοτήτων που διαθέτει, ώστε το αεροσκάφος να στρέψει το ρύγχος προς τα κάτω. Αυτό μπορεί να προκαλέσει έντονα μεταβατικά φαινόμενα και σημαντική αρνητική φόρτιση με επιταχύνσεις αρκετών g. Για τον λόγο αυτό, συνήθως η λειτουργία συνάντησης του ίχνους καθόδου είναι εφοδιασμένη με μια επιπλέον λειτουργία ομαλοποίησης-περιορισμού των κατακόρυφων επιταχύνσεων.
5.3. Αυτόματη λειτουργία οριζοντίωσης-flare
Η επιτρεπόμενη κατακόρυφη ταχύτητα επαφής ενός αεροσκάφους στον διάδρομο προσγείωσης προσδιορίζεται από πολλούς παράγοντες:
• Από το επιθυμητό επίπεδο άνεσης των επιβατών και του πληρώματος. Η βαριά προσγείωση (βαθμοί επαφής 6 ft/sec ή περισσότερο) δεν είναι αποδεκτή για καθημερινές πτήσεις. Η θετική επαφή (βαθμοί επαφής 2-3 ft/sec) είναι επιθυμητή. Για τον αναγνώστη που δεν έχει πτητική εμπειρία πρέπει να γίνει κατανοητό ότι η μαλακή επαφή, με σχεδόν μηδενικό βαθμό επαφής, είναι επίσης μη επιθυμητή. Ο λόγος είναι ότι με τη μαλακή επαφή, το αεροσκάφος μετά την επαφή με τον αεροδιάδρομο, τείνει να “επιπλέει”, με άμεσο αποτέλεσμα τη μη ικανοποιητική ικανότητα επιβράδυνσης, καθώς το βάρος δεν «πέφτει» στους τροχούς για να αναπτυχθούν σημαντικές δυνάμεις πρόσφυσης και τριβής. Επίσης, απαιτείται μεγάλη επιδεξιότητα από τον πιλότο -σε αντίθεση με την τεχνική θετικής επαφής- ώστε να κατευθύνει το αεροσκάφος για μαλακή επαφή σε ένα συγκεκριμένο σημείο προσγείωσης.
• Μπορεί να συμβεί δομική αστοχία στο σύστημα προσγείωσης εφόσον ο βαθμός καθόδου κατά την επαφή είναι πολύ μεγάλος. Για αυτό τον σκοπό υπάρχουν κριτήρια σχεδίασης που αφορούν τους μέγιστους επιτρεπόμενους βαθμούς καθόδου κατά την επαφή στον διάδρομο, που εξαρτώνται από τον τύπο του αεροσκάφους. Για τα πολιτικά αεροσκάφη τα συστήματα προσγείωσης έχουν σχεδιαστεί ώστε να αντέχουν βαθμούς επαφής το λιγότερο 10 ft/sec ενώ για κάποια από τα μαχητικά που επιχειρούν σε αεροπλανοφόρα η τιμή αυτή μπορεί να φτάσει και τα 25 ft/sec.
Ο πίνακας 8.1 περιγράφει τη σχέση μεταξύ της κατακόρυφης ταχύτητας επαφής και της ταχύτητας του αεροσκάφους, εφόσον το αεροσκάφος εκτελεί μια τυπική προσέγγιση γωνίας ίχνους καθόδου 2,5º.
|
Οριζόντια ταχύτητα |
Κατακόρυφη ταχύτητα σε ίχνος καθόδου 2.5⁰ |
||
|
Knots |
ft/sec |
ft/sec |
‘Μαλακές προσγειώσεις’ |
|
10 |
17 |
0.7 |
|
|
20 |
34 |
1.5 |
|
|
40 |
68 |
3.0 |
|
|
80 |
135 |
6.0 |
‘Σκληρές προσγειώσεις’ |
|
120 |
203 |
9.0 |
|
|
160 |
270 |
12.0 |
|
Πίνακας 8.1 Κατακόρυφη ταχύτητα του αεροσκάφους για ίχνος καθόδου 2.5°, ανάλογα με την οριζόντια του ταχύτητα και αντιστοιχία με τον τρόπο προσγείωσης.
Το σχήμα 8.31 απεικονίζει το ίχνος καθόδου που ακολουθείται από το αεροσκάφος κατά τη διάρκεια του ελιγμού οριζοντίωσης (flare). Ο ελιγμός αυτός περιλαμβάνει τη μείωση της ταχύτητας του αεροσκάφους, τόσο για τη μείωση του βαθμού καθόδου, όσο και για να διασφαλισθεί ότι το αεροσκάφος μπορεί να τροχιοδρομήσει και να φρενάρει στο διαθέσιμο μήκος αεροδιαδρόμου. Επίσης, κατά τη φάση αυτή, το αεροσκάφος στρέφει το ρύγχος προς τα πάνω, τόσο για να επιτευχθεί μείωση της ταχύτητας, όσο και για να διασφαλισθεί επαρκής άνωση, αλλά και ασφαλής δυνατότητα επαφής των τροχών του με τον αεροδιάδρομο.
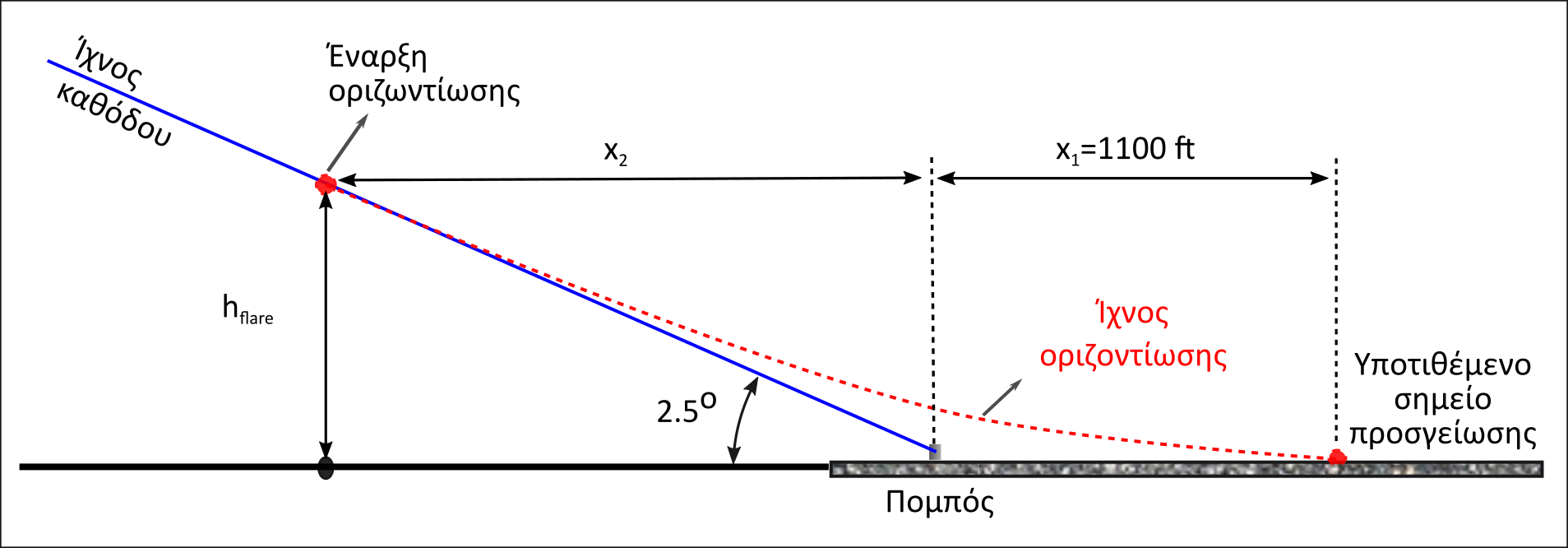
Σχήμα 8.31 Ίχνος καθόδου αεροσκάφους κατά τον ελιγμό οριζοντίωσης (flare).
Πρέπει να σημειωθεί ότι στα αεροπλανοφόρα τα αεροσκάφη δεν οριζοντιώνουν πριν την επαφή. Αντίθετα ακολουθούν το σχεδιασμένο ίχνος καθόδου έως και την επαφή, ενώ στην ιδανική περίπτωση στοχεύουν να αγκιστρωθούν μέσω του αγκίστρου (hook) που διαθέτουν στο συρματόσχοινο ανάσχεσης νούμερο τρία. Στη συνέχεια θα επιβραδυνθούν μέσω αυτού στον εναπομείναντα διάδρομο προσγείωσης του πλοίου.
Για τον έλεγχο του αεροσκάφους κατά τη φάση οριζοντίωσης χρησιμοποιούνται επίσης αυτόματοι πιλότοι. Βασικές προϋποθέσεις και αρχές λειτουργίας τους είναι:
• Το αεροσκάφος εκτελεί ελεγχόμενη κίνηση στο ίχνος καθόδου μέσω αυτόματου πιλότου που αναπτύχθηκε στην ενότητα 5.2 του παρόντος κεφαλαίου.
• Ο ελιγμός οριζοντίωσης ξεκινά σε ύψος hflare.
• Το αναμενόμενο σημείο επαφής στον αεροδιάδρομο βρίσκεται σε απόσταση x1 (π.χ. στα 1100 ft) από τον επίγειο σταθμό του ίχνους καθόδου (σχήμα 8.31).
Υποτίθεται στη συνέχεια ότι το ίχνος οριζοντίωσης προσεγγίζεται με μια σχέση που το καθιστά εφαπτόμενο στο σημείο P:
|
|
|
(8.87) |
Αυτή η εξίσωση αντιπροσωπεύει τον νόμο ελέγχου του ίχνους οριζοντίωσης. Αρχικά θα πρέπει να προσδιορισθούν τα hflare και τ. Στην αρχή της οριζοντίωσης, ο βαθμός καθόδου ισούται με την κατακόρυφη συνιστώσα της ταχύτητας του αεροσκάφους, η οποία προκύπτει ως:
|
|
|
(8.88) |
Με παραγώγιση της σχέσης (8.87) προκύπτει:
|
|
|
(8.89) |
Αν υποτεθεί ότι το αεροσκάφος ακουμπά στο έδαφος σε t = 4τ, (οπότε η σταθερά e-τ/Τ = e-4 ≈ 0) τότε :
|
|
|
(8.90) |
Από την (8.90) προκύπτει:
|
|
|
(8.91) |
Από το σχήμα 8.31:
|
|
|
(8.92) |
Από την εξίσωση (8.17) προκύπτει ότι:
|
|
|
(8.93) |
Με αντικατάσταση της εξίσωσης (8.92) στην (8.91) για δεδομένη τιμή του x1, προκύπτει η τιμή για την απόσταση x2 ενώ στη συνέχεια από την εξίσωση (8.90) προκύπτει η τιμή για το τ. Το ύψος οριζοντίωσης hflare από το οποίο ξεκινά η οριζοντίωση θα προκύψει με αντικατάσταση της τιμής του τ στην εξίσωση (8.91). Με την τιμή για το τ γνωστή, ο νόμος ελέγχου του flare μπορεί τώρα να εκφραστεί σύμφωνα με τη σχέση (8.89) ως:
|
|
|
(8.94) |
Το δομικό διάγραμμα που περιγράφει το σύστημα ελέγχου του flare παρουσιάζεται στο σχήμα 8.32. Η παρουσία του συζεύκτη (coupler) e στο κύκλωμα, είναι για να εισαχθεί στον αυτόματο πιλότο το σήμα του σφάλματος του ρυθμού καθόδου. Το σφάλμα αυτό δίδει κατάλληλες εντολές ελέγχου στο συνολικό συνδυασμένο σύστημα του αεροσκάφους με τους επιμέρους αυτόματους πιλότους που περιλαμβάνει, όπως π.χ. οι αυτόματοι πιλότοι ελέγχου της θέσης πρόνευσης και της ταχύτητας του.
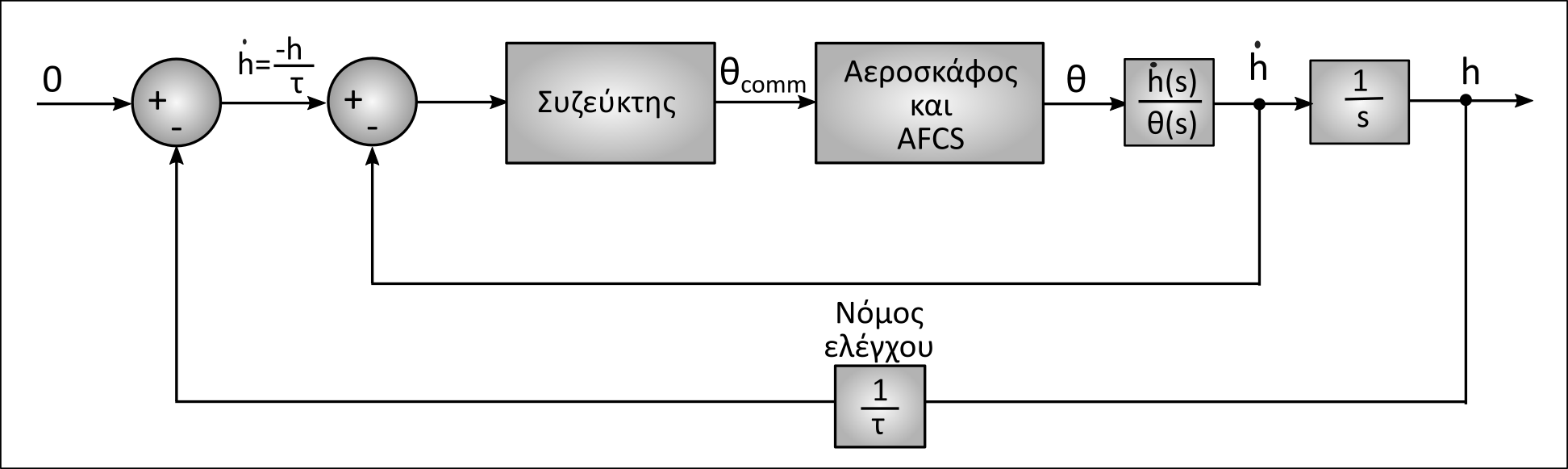
Σχήμα 8.32 Δομικό διάγραμμα ΣΑΕ διατήρησης του ίχνους οριζοντίωσης (flare).
Πρέπει να σημειωθεί, ότι η ευστάθεια στο σημείο λειτουργίας επηρεάζεται σε σημαντικό βαθμό από την επιλογή του κέρδους του συζεύκτη. Με την προσθήκη ενός αντισταθμιστή προπορείας-καθυστέρησης, αυτή η ευαισθησία είναι δυνατό να μειωθεί. Σε αυτό το σημείο πρέπει να γίνει κατανοητό, ότι οι αυτόματοι πιλότοι εκτελούν τους διάφορους ελιγμούς με σημαντικά βελτιωμένη ακρίβεια σε σύγκριση με τον άνθρωπο,. Επομένως τα αυτόματα συστήματα ελέγχου της οριζοντίωσης θα προκαλούσαν ζημιά σε ένα συγκεκριμένο σημείο του διαδρόμου προσγείωσης, καθώς όλα τα αεροσκάφη που θα ήταν εφοδιασμένα με ένα τέτοιο σύστημα θα ακουμπούσαν σε ένα και μόνο σημείο. Στην πράξη και για να αποφευχθεί κάτι τέτοιο, οι περισσότεροι νόμοι ελέγχου περιλαμβάνουν ένα σύστημα, το οποίο μεταβάλει το προτιθέμενο σημείο προσγείωσης. Αυτός ο τεχνητός τρόπος προκαλεί τη διασπορά του σημείου προσγείωσης κατά μήκος του διαδρόμου, κάτι που ο πιλότος μη ηθελημένα προκαλεί συνεχώς.
5.4. Εγκάρσιες λειτουργίες πλοήγησης και προσγείωσης. Λειτουργία τήρησης του ίχνους του εντοπιστή (localizer)
Αυτές οι λειτουργίες, χρησιμοποιούνται ώστε να κατευθύνουν το αεροσκάφος κατά μήκος προκαθορισμένων ιχνών, όπως η συνάντηση και η τήρηση του ίχνους του εντοπιστή (localizer) ως μέρος της ενόργανης διαδικασίας προσέγγισης ILS, ή η συνάντηση και η τήρηση ενός ίχνους που ορίζεται από ένα σταθμό εδάφους (π.χ. κοντά στην άκρη του διαδρόμου προσγείωσης).
Είναι απαραίτητο το αεροσκάφος να διαθέτει ήδη σύστημα ελέγχου της πορείας, όπως αναφέρθηκε στην ενότητα 4.2.3 του κεφαλαίου 8. Το σχήμα 8.33 απεικονίζει τη γεωμετρία του ίχνους πτήσης για αυτή τη λειτουργία. Βασικές προϋποθέσεις και διευκρινίσεις για τη λειτουργία τους είναι:
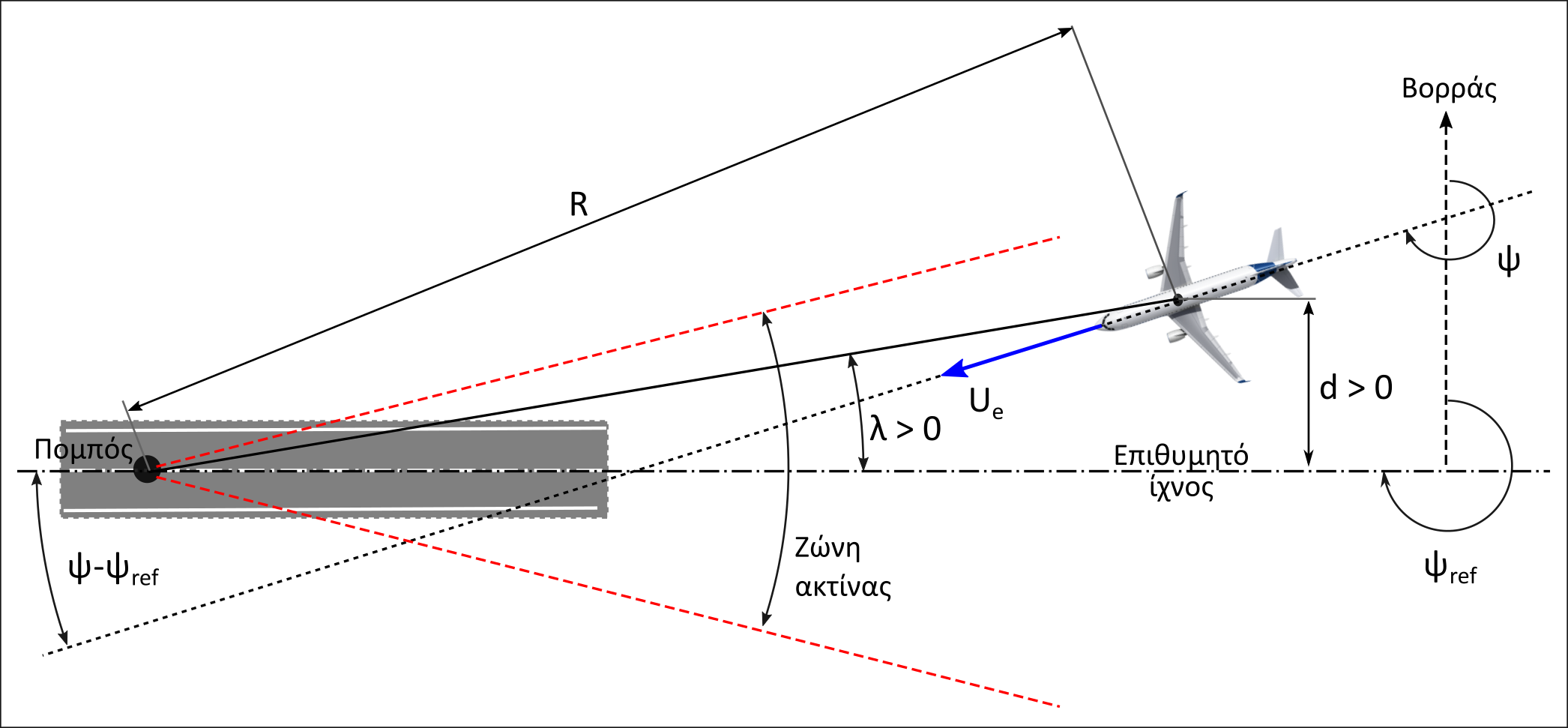
Σχήμα 8.33 Γεωμετρία ίχνους πτήσης κατά τη λειτουργία τήρησης του ίχνους του εντοπιστή (localizer).
• Η θέση της κεραίας του αεροσκάφους συμπίπτει με το ΚΒ.
• Το ΚΒ κινείται κατά μήκος της κεντρικής γραμμής της δέσμης του localizer, το οποίο αποτελεί και το επιθυμητό ίχνος.
• Η γωνία σφάλματος λ του εντοπιστή ανιχνεύεται από ένα δέκτη που είναι τοποθετημένος πάνω στο αεροσκάφος.
• Για την τήρηση του αεροσκάφους πάνω στην κεντρική γραμμή της δέσμης χρησιμοποιείται ένα σύστημα ελέγχου της πορείας, όπως αυτό αναλύθηκε στην ενότητα 4.2.3. Το εύρος της δέσμης του εντοπιστή τυπικά είναι 5° δηλαδή 2.5° δεξιά-αριστερά από την κεντρική γραμμή.
Η γωνία σφάλματος του εντοπιστή λ, προσδιορίζεται από το σχήμα 8.33:
|
|
|
(8.95) |
όπου R είναι η απόσταση του αεροσκάφους από το σταθμό εδάφους. Η απόσταση d από την κεντρική γραμμή είναι:
|
|
|
(8.96) |
όπου
|
|
|
(8.97) |
έτσι ώστε
|
|
|
(8.98) |
Το σχήμα 8.34 απεικονίζει το δομικό διάγραμμα που αντιστοιχεί σε ένα σύστημα τήρησης του εντοπιστή [13]. Στο σχήμα 8.34 το κουτί «Αεροσκάφος και AFCS» αντιπροσωπεύει το αεροσκάφος μαζί με το σύστημα ελέγχου της πορείας του, όπως αυτό περιγράφεται στην παράγραφο 4.2.3.
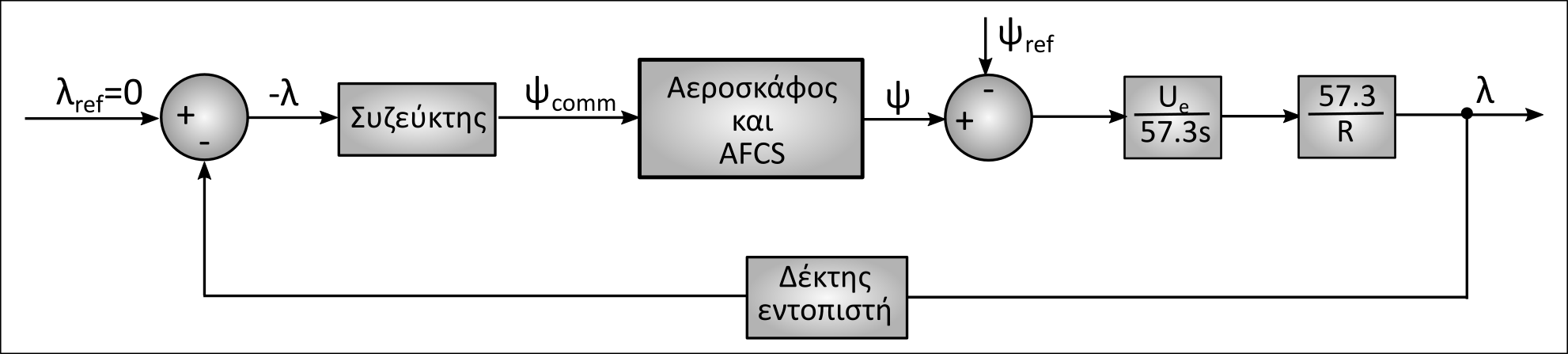
Σχήμα 8.34 Δομικό διάγραμμα ΣΑΕ τήρησης του ίχνους εντοπιστή (localizer).
Το πραγματικό αεροσκάφος είναι εφοδιασμένο με ένα μόνο δέκτη και την αντίστοιχη κεραία για τη μέτρηση της γωνίας λ. Η παράμετρος 1/R λειτουργεί ως μεταβλητό κέρδος για το σύστημα, και αντιμετωπίζεται ακριβώς όπως και στην περίπτωση τήρησης του ίχνους καθόδου.
Βιβλιογραφία/Αναφορές
|
Michael V. Cook, Flight Dynamics Principles - A Linear Systems Approach to Aircraft Stability and Control, 2nd ed. Oxford, UK: Elsevier Ltd, 2007. |
|
|
Robert C. Nelson, Flight Stability and Automatic Control, 2nd ed. Singapore: WCB/McGraw-Hill, 1998. |
|
|
Donald McLean, Automatic Flight Control Systems. Hertfordshire, UK: Prentice Hall International (UK) Ltd, 1990. |
|
|
John H. Blakelock, Automatic Control of Aircraft and Missiles, 2nd ed. New York, NY, USA: John Wiley & Sons, Inc., 1991. |
|
|
Νικόλαος Ι. Κρικέλης, Εισαγωγή στον Αυτόματο Έλεγχο. Αθήνα, Ελλάδα: Συμμετρία, 1992. |
|
|
Νικόλαος Ι. Κρικέλης, Μοντελοποίηση & Βέλτιστος Έλεγχος Συστημάτων, 3η εκ. Αθήνα, Ελλάδα: Fountas Books, 2003. |
|
|
Δ. Ροζής, "Επισκόπηση δυναμικών χαρακτηριστικών και χαρακτηριστικών ελέγχου πτήσης αεροσκαφών", ΕΜΠ, Αθήνα, MSc Thesis 2006. |
ΠΑΡΑΡΤΗΜΑΤΑ
Α. Βασικές σχέσεις της μηχανικής στερεού σώματος
Α1. Γωνίες Euler
Στη Δυναμική Πτήσης απαιτείται συχνά ο μετασχηματισμός μεγεθών από ένα σύστημα αξόνων σε άλλο. Γενικά η διαδικασία συσχετισμού ενός μεγέθους ή μεταβλητής από ένα σύστημα αξόνων σε ένα άλλο γίνεται με πολύ συγκεκριμένο τρόπο και μάλιστα με τη βοήθεια κάποιων γωνιών που ονομάζονται γωνίες Euler.
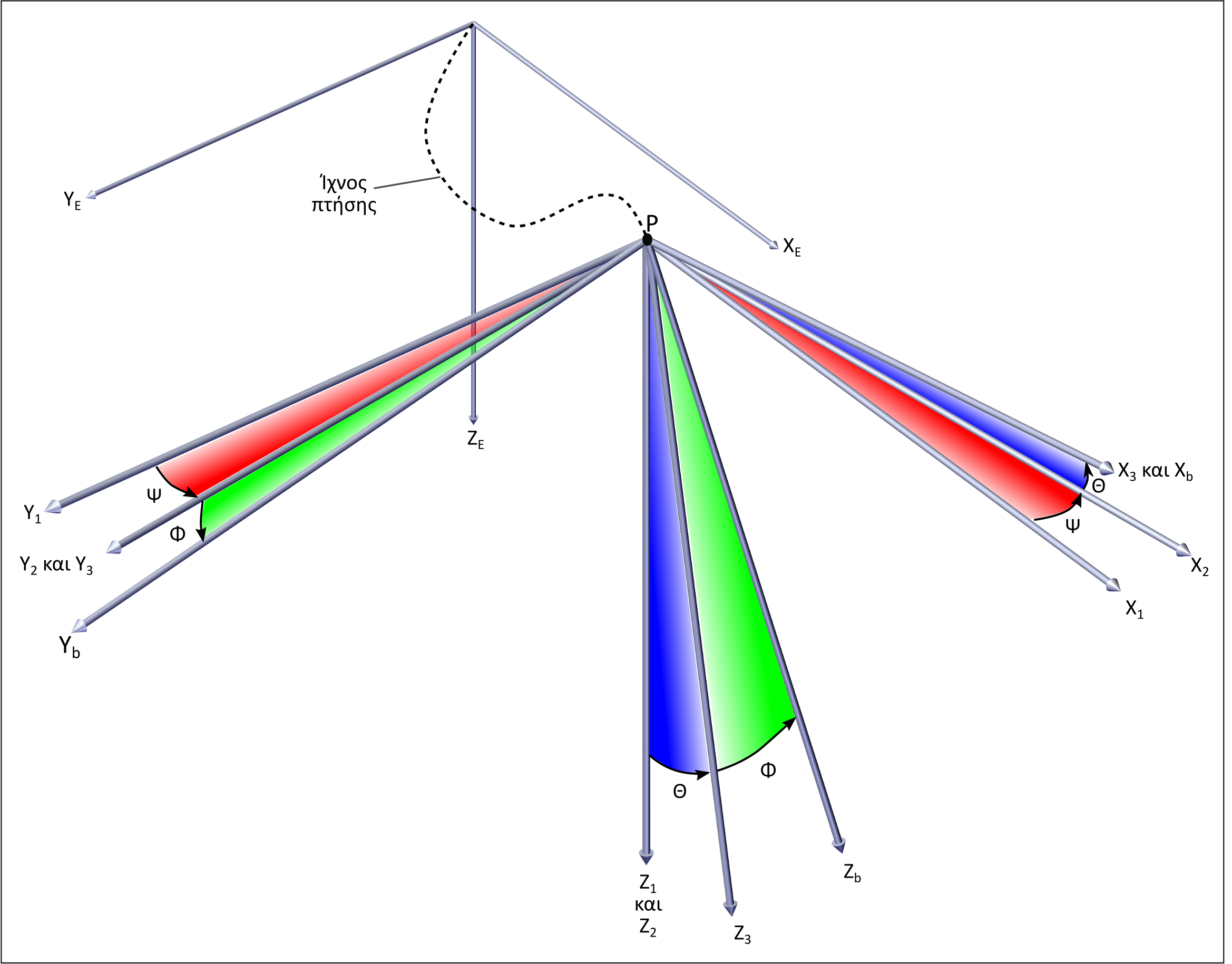
Σχήμα ΠΑΡ.Α.1 Γωνίες Euler - Μετασχηματισμός συντεταγμένων
Το σχήμα ΠΑΡ.Α.1 απεικονίζει το γήινο σύστημα (ΟxΕyΕzΕ) του οποίου η αρχή των αξόνων ταυτίζεται με το κέντρο βάρους του αεροσκάφους P. Σε αυτό το σημείο μετονομάζεται σε (Px1y1z1). O προσανατολισμός του σωματόδετου συστήματος (Pxyz)≡Oxbybzb, σε σχέση με το (Px1y1z1) περιγράφεται με τη βοήθεια τριών διαδοχικών περιστροφών ως προς τις γωνίες ψ, θ και φ.
• Περιστροφή 1: το σύστημα (Px1y1z1) περιστρέφεται περί του άξονα z1 με γωνία Ψ ή γωνία πορείας. Η θετική φορά αυτής της γωνίας φαίνεται στο σχήμα ΠΑΡ.Α.1. Το νέο σύστημα που προκύπτει μετονομάζεται (Px2y2z2).

• Περιστροφή 2: το σύστημα (Px2y2z2) περιστρέφεται περί του άξονα y2 με γωνία Θ, δηλαδή τη γωνία πρόνευσης. Η θετική φορά αυτής της γωνίας φαίνεται στο σχήμα ΠΑΡ.Α.1. Το νέο σύστημα που προκύπτει μετονομάζεται (Px3y3z3).

• Περιστροφή 3: το σύστημα (Px3y3z3) περιστρέφεται περί του άξονα x3 με γωνία Φ, τη γωνία κλίσης. Η θετική φορά αυτής της γωνίας φαίνεται επίσης στο σχήμα ΠΑΡ.Α.1. Το νέο σύστημα που προκύπτει μετονομάζεται στο σωματόδετο (Pxyz)≡Oxbybzb, δηλαδή σε αυτό το σημείο επιτυγχάνεται η ταύτιση του γήινου με το προσδεμένο σύστημα στο αεροσκάφος.

Τότε συνδυάζοντας και τους τρείς μετασχηματισμούς:
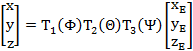
Α2. Χρονικές παράγωγοι και ρυθμοί μεταβολής ως προς αδρανειακό σύστημα συντεταγμένων
Στο σχήμα ΠΑΡ.Α.2, εικονίζεται το σωματόδετο σύστημα συντεταγμένων ΟΒΧΒΥΒΖΒ με συνεχή γραμμή στην αρχική του θέση και με διακεκομμένη γραμμή σε νέα θέση ΟΒΧ’ΒΥ’ΒΖΒ, μετά από περιστροφή του κατά γωνία θ. Για λόγους απλότητας του σχήματος, η περιστροφή γίνεται περί τον άξονα ΟΒΖΒ. Το σημείο P έχει μετακινηθεί σε νέα θέση P’. H μετακίνησή του προκύπτει σαν σύνδεση δύο κινήσεων:
Μιας περιστροφής κατά θ
περί τον άξονα ΟΒΖΒ (Διάνυσμα ![]() ),
λόγω περιστροφής του σώματος Β με γωνιακή ταχύτητα ω και μιας μεταβολής της
απόστασής του από την αρχή ΟΒ του ΟΒΧΒΥΒΖΒ,
λόγω της σχετικής κίνησης που πραγματοποιεί το P
στο σωματόδετο σύστημα ΟΒΧΒΥΒΖΒ
),
λόγω περιστροφής του σώματος Β με γωνιακή ταχύτητα ω και μιας μεταβολής της
απόστασής του από την αρχή ΟΒ του ΟΒΧΒΥΒΖΒ,
λόγω της σχετικής κίνησης που πραγματοποιεί το P
στο σωματόδετο σύστημα ΟΒΧΒΥΒΖΒ
![]()
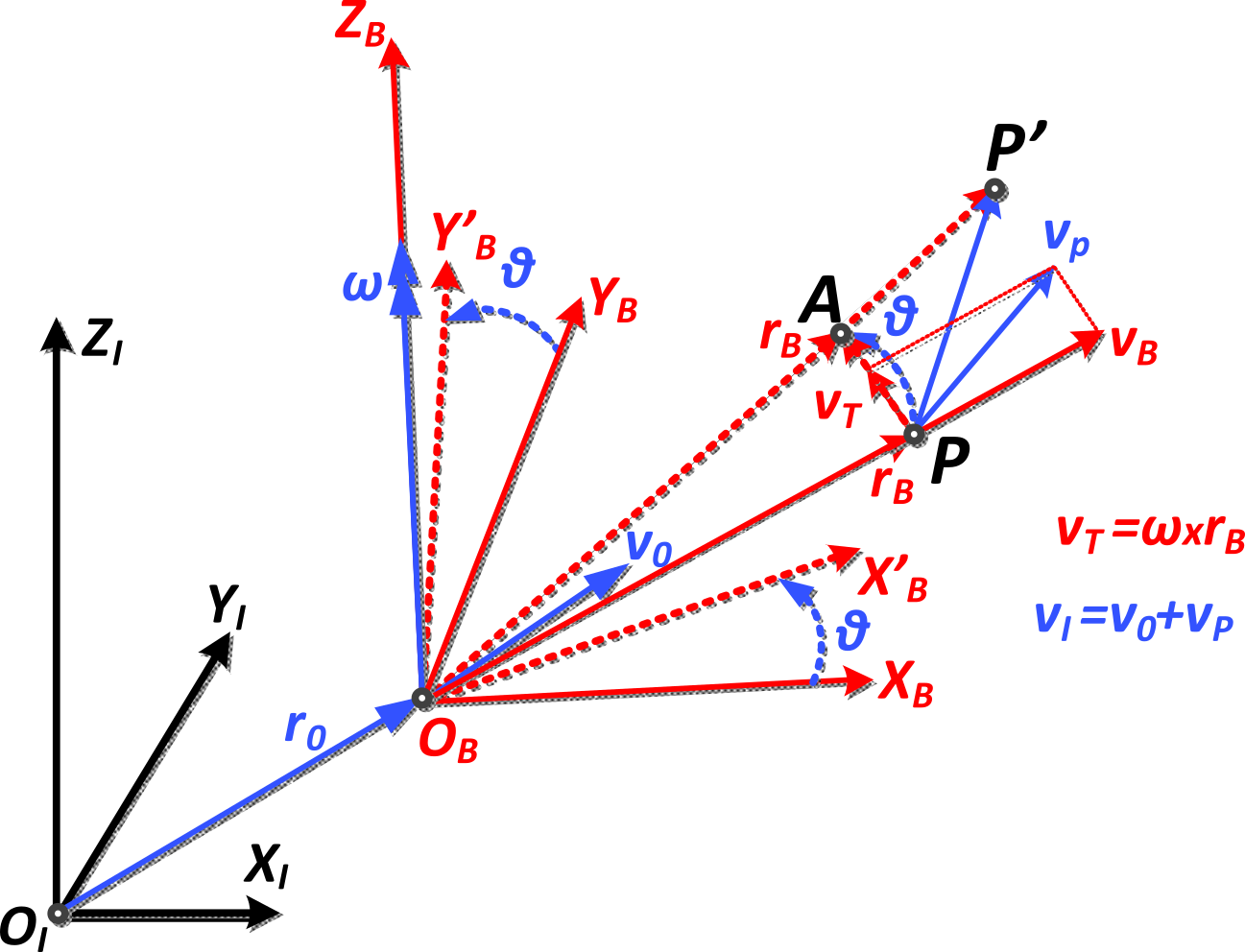
Σχήμα ΠΑΡ.Α.2 Μεταβολές ενός σημείου P ενός σώματος Β το οποίο μεταφέρεται και στρέφεται ως προς ένα αδρανειακό σύστημα αναφοράς ΟΙΧΙΥΙΖΙ . Το ΟΒΧΒΥΒΖΒ είναι ένα σωματόδετο σύστημα αναφοράς. (Για λόγους απλότητας του σχήματος, η γωνιακή ταχύτητα βρίσκεται στον άξονα ΟΒΖΒ.
• Ταχύτητα:
Η ταχύτητα vp ορίζεται:

![]()
όπου ο όρος ![]() παριστάνει
τη συνολική μεταβολή ως προς τον χρόνο ενός διανύσματος
παριστάνει
τη συνολική μεταβολή ως προς τον χρόνο ενός διανύσματος ![]() του
σωματόδετου συστήματος συντεταγμένων ως προς το αδρανειακό σύστημα αναφοράς.
του
σωματόδετου συστήματος συντεταγμένων ως προς το αδρανειακό σύστημα αναφοράς.
• Επιτάχυνση:
Με εντελώς ανάλογο τρόπο, μπορεί
να αποδειχθεί ότι συνολικός ρυθμός μεταβολής της ταχύτητας ![]() είναι:
είναι:
![]()
• Στροφορμή:
Με εντελώς ανάλογο τρόπο, μπορεί να αποδειχθεί ότι συνολικός ρυθμός μεταβολής της στροφορμής είναι:
![]()
Β. Μέθοδοι επίλυσης γραμμικών διαφορικών εξισώσεων
Ο σκοπός της επίλυσης είναι η εξαγωγή μιας μαθηματικής περιγραφής της μεταβολής όλων των μεταβλητών απόκρισης (εξόδου) ενός δυναμικού συστήματος συναρτήσει του χρόνου, μετά από την εφαρμογή εντολών (διεγέρσεων, εξόδων), καθώς και στη συνέχεια η εκτίμηση της ευστάθειας του δυναμικού συστήματος. Αυτή η μαθηματική περιγραφή, ονομάζεται και (δυναμικό) «μοντέλο» του δυναμικού συστήματος.
Χαρακτηριστικό κλασσικό παράδειγμα εφαρμογής των μεθόδων επίλυσης αποτελεί η δυναμική πτήσης. Οι σχέσεις που χαρακτηρίζουν τη δυναμική πτήσης απεικονίζονται συνοπτικά στο δομικό διάγραμμα του σχήματος Β1, όπου οι μεταβλητές απόκρισης (εξόδου) του αεροσκάφους είναι τα κινηματικά του μεγέθη, όπως αυτά ορίσθηκαν στην παράγραφο 3.2. Οι είσοδοι (διεγέρσεις) που θεωρούνται, είναι οι εντολές στα πηδάλια αεροδυναμικού ελέγχου και στον κινητήρα. Προφανώς υπάρχουν περισσότεροι του ενός συνδυασμοί εισόδων εξόδων.
Το μαθηματικό μοντέλο της δυναμικής του αεροσκάφους, είναι το σύνολο των διαφορικών εξισώσεων που περιγράφει τη δυναμική συμπεριφορά του αεροσκάφους. Στη γενική περίπτωση, μπορεί να είναι οποιοδήποτε από τα συστήματα διαφορικών εξισώσεων που υπολογίσθηκαν στο κεφάλαιο 3. Εφόσον το μαθηματικό μοντέλο που επιλέγεται είναι εκείνο των αποσυζευγμένων εξισώσεων μικρών διαταραχών, δεν υφίσταται συνάρτηση μεταφοράς που να συσχετίζει διαμήκεις μεταβλητές εισόδου με εγκάρσιες μεταβλητές εξόδου και το αντίστροφο. Αυτό φυσικά δεν ισχύει όταν το αεροσκάφος περιγράφεται από το μη γραμμικό πλήρως συζευγμένο σύστημα εξισώσεων ή από το πλήρως συζευγμένο σύστημα μικρών διαταραχών, όπως συνήθως συμβαίνει με τα ελικόπτερα.
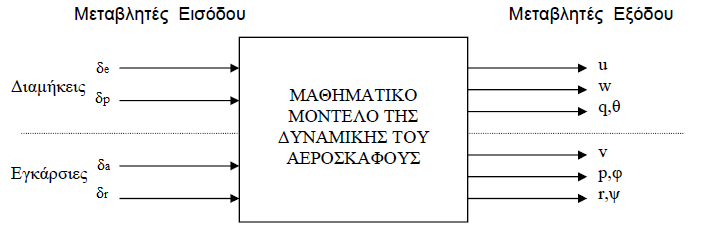
Σχήμα ΠΑΡ.Β.1 Σχηματική απεικόνιση του μοντέλου δυναμικής συμπεριφοράς αεροσκάφους
Στα πλαίσια του συγγράμματος, χρησιμοποιούνται δύο βασικές μέθοδοι έκφρασης και επίλυσης των εξισώσεων κίνησης:
• συναρτήσεις μεταφοράς,
• ανάλυση στον χώρο κατάστασης.
Οι δύο μέθοδοι είναι γενικά αλληλένδετες και ο διαχωρισμός γίνεται κυρίως για τον λόγο ότι η μέθοδος του χώρου κατάστασης έχει συγκεντρωμένες όλες τις πληροφορίες του συστήματος και μπορεί να καταχωρηθεί ταχύτερα ως έχει, σε λογισμικά όπως το Matlab και να γίνει επίλυση, εκμεταλλευόμενοι τα πολλά εργαλεία απεικόνισης και επεξεργασίας που παρέχει ένα τέτοιο λογισμικό. Σημαντικό πρόσθετο πλεονέκτημα της ανάλυσης στον χώρο κατάστασης, είναι η δυνατότητα εφαρμογής της και σε μη γραμμικά συστήματα, σε αντίθεση με τις συναρτήσεις μεταφοράς.
Β.1. Ορισμός και ιδιότητες μετασχηματισμού Laplace
Ο μετασχηματισμός Laplace αποτελεί ένα ευρέως διαδεδομένο εργαλείο στην επίλυση γραμμικών διαφορικών εξισώσεων. Η εφαρμογή του βασίζεται στη μετατροπή της διαφορικής εξίσωσης σε ένα σύστημα γραμμικών αλγεβρικών εξισώσεων των οποίων η επίλυση μπορεί να γίνει εύκολα με τη χρήση υπολογιστών. Επιπλέον, η σχέση απόκρισης εισόδου-εξόδου, μπορεί εύκολα να περιγραφεί με τη χρήση συναρτήσεων μεταφοράς. Στη συνέχεια, η χρονική απόκριση μπορεί να υπολογισθεί με τον αντίστροφο μετασχηματισμό Laplace της συνάρτησης μεταφοράς για την είσοδο που ενδιαφέρει. Επιπλέον, ο υπολογισμός της συνάρτησης μεταφοράς του συστήματος παρέχει το βασικό εργαλείο για τον σχεδιασμό ενός συστήματος ανάδρασης (feedback control system).
Ο μετασχηματισμός Laplace μιας συνάρτησης f(t) ορίζεται ως εξής:
|
|
|
|
Ενώ ο αντίστροφος μετασχηματισμός Laplace:
|
|
|
|
Έτσι, έχουν δημιουργηθεί πίνακες με τους μετασχηματισμούς διάφορων μορφών συναρτήσεων και με ιδιότητες του μετασχηματισμού Laplace, ώστε αυτός να είναι εύκολα και άμεσα εφαρμόσιμος.
Στον πίνακα ΠΑΡ.Β.1 παρουσιάζεται ο μετασχηματισμός Laplace των πιο συχνά χρησιμοποιούμενων συναρτήσεων.
Οι βασικές ιδιότητες του μετασχηματισμού Laplace συνοψίζονται στον επόμενο πίνακα ΠΑΡ.Β.2.
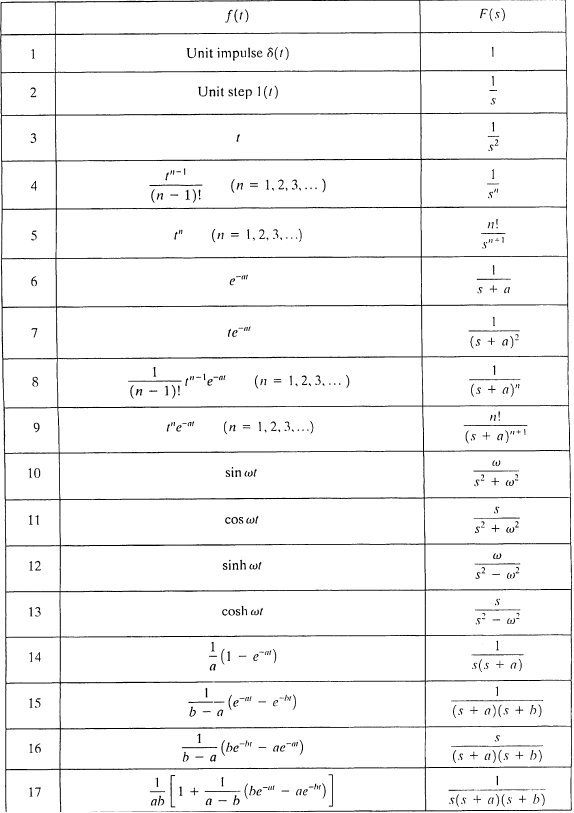
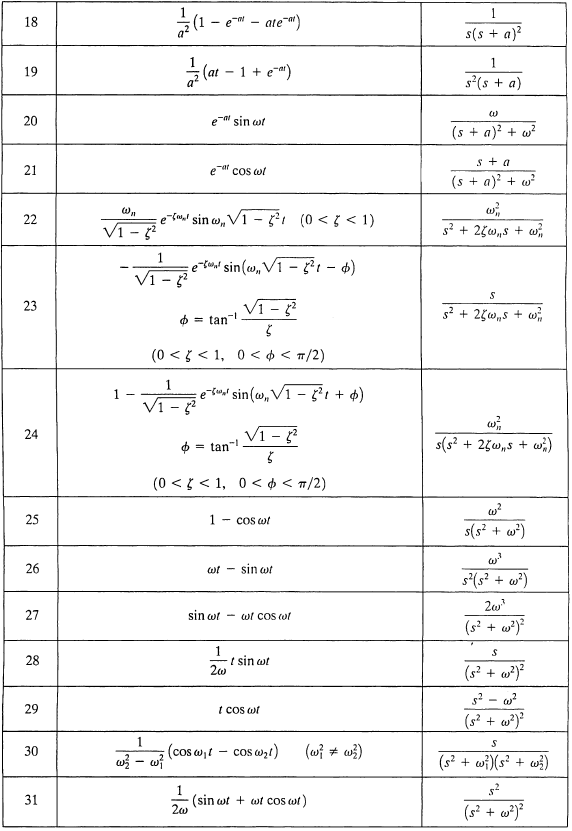
Πίνακας ΠΑΡ.Β.1 Μετασχηματισμός Laplace των συνηθέστερων συναρτήσεων
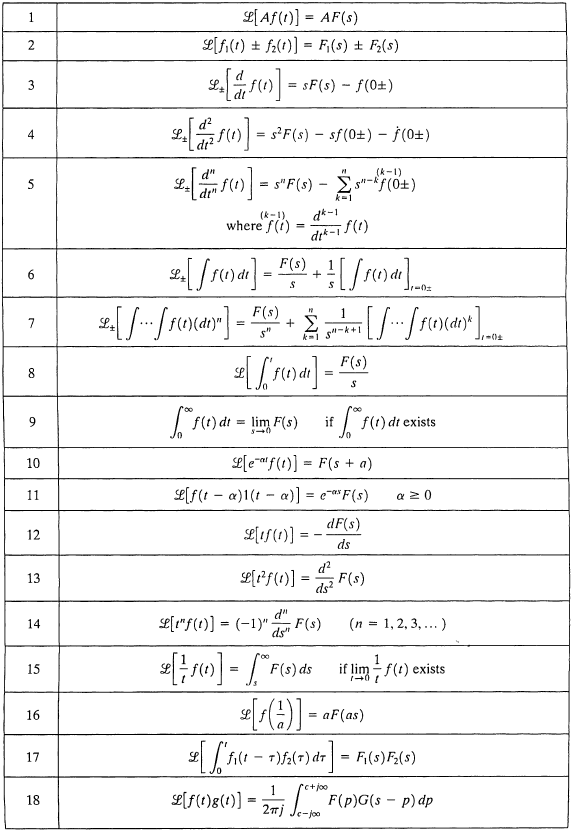
Πίνακας ΠΑΡ.Β.2 Ιδιότητες του μετασχηματισμού Laplace
Β.2. Γενικά για τις συναρτήσεις μεταφοράς
Β.2.1. Ορισμός – Πόλοι και μηδενιστές
Έστω το γραμμικό χρονικά αμετάβλητο σύστημα που ορίζεται με τη διαφορική εξίσωση, όπως παρουσιάζεται στο [10]:

ή αλλιώς:
![]()
Ο μετασχηματισμός Laplace για μηδενικές αρχικές συνθήκες προκύπτει:
![]()
![]()
Εξάγοντας κοινούς παράγοντες προκύπτει:
![]()
Τότε η συνάρτηση μεταφοράς είναι:

όπου Κ: κέρδος
Δηλαδή η συνάρτηση μεταφοράς είναι ο λόγος του μετασχηματισμού Laplace της συνάρτησης εξόδου προς τον μετασχηματισμό της συνάρτησης εισόδου και εκφράζει τις ιδιότητες του συστήματος, ανεξάρτητα από τη συνάρτηση εισόδου. Κανονικές ονομάζονται οι συναρτήσεις μεταφοράς στις οποίες:
![]()
Κάποιες φορές στις συναρτήσεις μεταφοράς του αεροσκάφους εμφανίζονται μη κανονικές μορφές (για παράδειγμα η απόκριση της επιτάχυνσης σε σχέση μ’ ένα τυχαίο σήμα εισόδου). Η χαρακτηριστική εξίσωση ορίζεται εξισώνοντας τον παρονομαστή της ΣΜ με το μηδέν:
![]()
Οι n ρίζες της χαρακτηριστικής εξίσωσης –δηλαδή του πολυωνύμου του παρονομαστή- ονομάζονται πόλοι του συστήματος.
Εξισώνοντας τον αριθμητή της ΣΜ με το μηδέν:
![]()
Προκύπτουν οι m ρίζες του πολυωνύμου του αριθμητή της συνάρτησης μεταφοράς, οι οποίες ονομάζονται μηδενιστές του συστήματος.
Β.2.2. Συστήματα 2ης τάξης
Ένα τέτοιο σύστημα είναι το κλασσικό μηχανικό σύστημα «μάζα-αποσβεστήρας-ελατήριο». Η ανάλυση του συστήματος αυτού περιέχει βασικές ορολογίες και έννοιες χρησιμότατες στη μοντελοποίηση ακόμα και συστημάτων μεγαλύτερης τάξης, όπως θα γίνει προφανές σε μεταγενέστερο στάδιο.
Η χαρακτηριστική εξίσωση ενός συστήματος 2ης τάξης εκφράζεται ως εξής:
![]()
Οι ρίζες της χαρακτηριστικής εξίσωσης υπολογίζονται ως:
![]()
όπου
• ζ: απόσβεση,
• ωn: φυσική συχνότητα χωρίς απόσβεση.
Ανάλογα με την τιμή της απόσβεσης, υπάρχουν τέσσερις βασικές περιπτώσεις ριζών/πόλων που αντιστοιχούν σε τέσσερις περιπτώσεις αποκρίσεων:
1) ζ = 0: μηδενική απόσβεση – Επ’ άπειρον ταλάντωση – Συζυγείς πόλοι πάνω στον φανταστικό άξονα.
![]()
2) 0 < ζ < 1: υπό-απόσβεση - αποσβενόμενη ταλάντωση - μιγαδικοί συζυγείς πόλοι.
![]()
![]()
![]()
![]()
3) ζ = 1: κρίσιμη απόσβεση - καθόλου ταλάντωση- πραγματικοί και ίσοι πόλοι.
![]()
4) ζ > 1: υπέρ-απόσβεση - καθόλου ταλάντωση – πραγματικοί, άνισοι και αρνητικοί πόλοι.
![]()
B.2.3. Παράσταση στο μιγαδικό επίπεδο και η έννοια του τόπου των ριζών
Έστω το σύστημα ελέγχου με ανάδραση του σχήματος ΠΑΡ.Β.2:
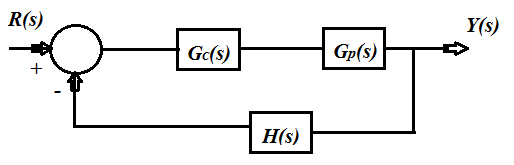
Σχήμα ΠΑΡ.Β.2. Σύστημα ελέγχου με ανάδραση
Ο μετασχηματισμός Laplace της εξόδου, εκφράζεται ως:
![]()
Η ΣΜ του κλειστού βρόχου ορίζεται ως:
![]()
ενώ η ΣΜ ανοιχτού βρόχου:
![]()
όπου
• Gc: ΣΜ του κατευθυντή,
• Gp: ΣΜ της εγκατάστασης,
• Η: ΣΜ ανάδρασης.
Θέτοντας:
![]()
η χαρακτηριστική εξίσωση γίνεται:
![]()
Καθώς η G(s)H(s) είναι μιγαδική ποσότητα, εξισώνοντας τα μέτρα και τις γωνίες των δύο μελών, προκύπτουν οι εξής συνθήκες:
1) Συνθήκη μέτρου:
![]()
2) Συνθήκη γωνίας:
![]()
Οι τιμές si που ικανοποιούν και τις δύο συνθήκες, δηλαδή οι ρίζες τις χαρακτηριστικής, αποτελούν τους πόλους κλειστού βρόχου του συστήματος.
Ο τόπος των ριζών αντιστοιχεί στα σημεία που ικανοποιούν μόνο τη συνθήκη γωνίας.
Η χαρακτηριστική εξίσωση μπορεί να εκφραστεί ως:
![]()
όπου
• Κ: κέρδος ανοιχτού βρόχου,
• Ζ(s) = (s+z1)(s+z2)...(s+zi) με z τους μηδενιστές ανοιχτού βρόχου,
• P(s) = sn(s+p1)(s+p2)...(s+pi) με p τους πόλους ανοιχτού βρόχου.
Το κέρδος ανοιχτού βρόχου, υπολογίζεται ως εξής:
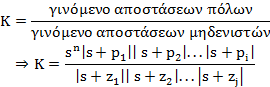
Η παράσταση του τόπου των ριζών γίνεται στο μιγαδικό επίπεδο. Για ένα σύστημα 2ης τάξης όπως παρουσιάστηκε στην προηγούμενη παράγραφο, ανάλογα με την απόσβεση υπάρχουν διάφορες περιπτώσεις πόλων. Ειδικά στη περίπτωση για 0<ζ<1:
![]()
Στο σχήμα ΠΑΡ.Β.3 φαίνεται πως καθορίζονται τα δυναμικά χαρακτηριστικά ζ, ωn στο μιγαδικό επίπεδο. Για την απόσβεση ζ ισχύει:
![]()
Δηλαδή ο συντελεστής απόσβεσης είναι θετικός στο αριστερό ημιεπίπεδο. Για αυτό η ύπαρξη πόλων στο δεξιό ημιεπίπεδο είναι άμεση ένδειξη ασταθούς συστήματος. Ανάλογα στον αρνητικό πραγματικό ημιάξονα ισχύει ότι ζ=1, ενώ στον φανταστικό άξονα ζ=0. Η φυσική συχνότητα χωρίς απόσβεση ωn ισούται με το μέτρο του μιγαδικού πόλου.
Για πιο λεπτομερή και εκτεταμένη ανάλυση για τη χάραξη του τόπου των ριζών και τη σημασία του, ο αναγνώστης παραπέμπεται στη βιβλιογραφία.
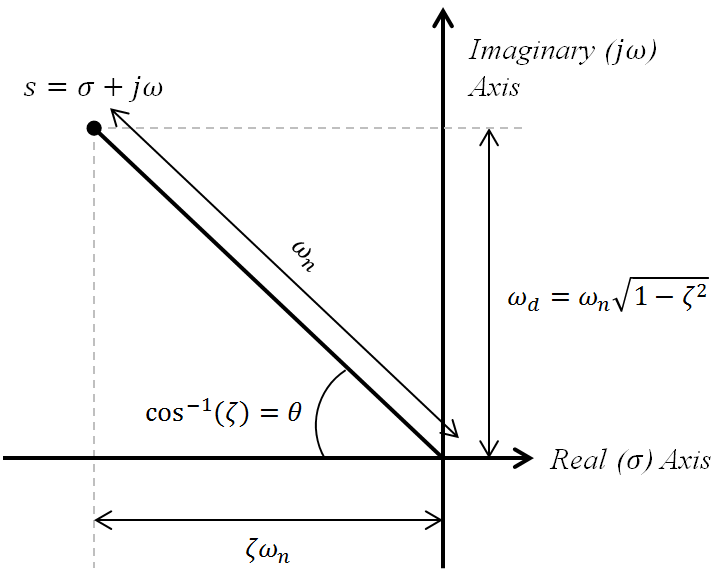 >
>
Σχήμα ΠΑΡ.Β.3 Παράσταση στο μιγαδικό επίπεδο.
Συνοπτικά, κάθε κλάδος του τόπου ριζών ξεκινά από ένα πόλο όπου Κ=0 και καταλήγει σε ένα μηδενιστή, όπου Κ=∞. Όσο πιο κοντά στον φανταστικό άξονα βρίσκεται ο πόλος τόσο πιο ασταθές γίνεται το σύστημα. Στη τομή του τόπου των ριζών με τον φανταστικό άξονα, υφίσταται ένα κρίσιμο κέρδος Κcrit το οποίο αν ξεπεραστεί, το σύστημα γίνεται ασταθές εφόσον περνάμε πλέον στο δεξιό ημιεπίπεδο.
Στις εφαρμογές της δυναμικής πτήσης, ο στόχος είναι η κατάλληλη επιλογή/σχεδιασμός των κατευθυντών και του κέρδους, ώστε να επιτυγχάνονται ικανοποιητικά δυναμικά χαρακτηριστικά και παράλληλα να αυξάνεται η ευστάθεια του συστήματος.
Ειδικά στα απλά συστήματα, αυτό επιτυγχάνεται με τη μέθοδο τοποθέτησης πόλων.
B.2.4. Απόκριση συχνότητας-Διαγράμματα Bode
Η έννοια απόκριση συχνότητας, αναφέρεται στην απόκριση μόνιμης κατάστασης (t→∞) ενός συστήματος το οποίο έχει ημιτονοειδή είσοδο σταθερού εύρους και της οποίας η συχνότητα μπορεί να μεταβάλλεται σε κάποια περιοχή.
Η χρήση της μεθόδου αυτής έχει κάποια βασικά πλεονεκτήματα:
• Γνωρίζοντας τα χαρακτηριστικά της απόκρισης συχνότητας του ανοιχτού βρόχου ενός γραμμικού συστήματος κλειστού βρόχου, μπορεί να διερευνηθεί η απόλυτη και σχετική ευστάθεια του.
• Το κριτήριο της ευστάθειας δεν απαιτεί τον προσδιορισμό των πόλων του συστήματος.
Έστω σύστημα, με συνάρτηση μεταφοράς G(s), είσοδο x(t), και έξοδο y(t). Η απόκριση συχνότητας του συστήματος προκύπτει αντικαθιστώντας στη σΜ τη μιγαδική μεταβλητή s που εισάγεται από τον μετασχηματισμό Laplace, με τη φανταστική μεταβλητή jω, όπου ω [rad/sec] είναι η συχνότητα εφόσον η είσοδος είναι ημιτονοειδής συνάρτηση:
![]()
και η ΣΜ ως ο λόγος δύο πολυωνύμων του s:

Η απόκριση μόνιμης κατάστασης ενός ευσταθούς ΓΧΑΣ σε μια ημιτονοειδή είσοδο, είναι ανεξάρτητη των αρχικών συνθηκών οι οποίες και υποτίθενται μηδενικές. Αντικαθιστώντας το s, η ΣΜ που είναι μιγαδική ποσότητα, γράφεται:
![]()
όπου |G(jω)| το μέτρο και φ η γωνιά της ΣΜ:
![]()
![]()
Εφόσον από τη μιγαδική ανάλυση ισχύει:
![]()
Προκύπτει η απόκριση μόνιμης κατάστασης στη μορφή:
![]()
Δηλαδή η έξοδος του συστήματος, είναι επίσης ημιτονοειδής με συχνότητα ίδια με τη συχνότητα της εισόδου, ενώ γενικά έχει διαφορετικό πλάτος (μέτρο) και διαφορά φάσης από την είσοδο.
• φ < 0°: Υπολειπόμενη φάση (phase lag).
• φ > 0°: Προπορευόμενη φάση (phase lead).
Η παράσταση μιας ημιτονοειδούς ΣΜ μπορεί να γίνει σε δύο διαφορετικά διαγράμματα που απεικονίζουν το μέτρο και τη γωνία φάσης συναρτήσει της συχνότητας. Για τον σκοπό αυτό έχει καθιερωθεί το λογαριθμικό διάγραμμα Bode. Τα διαγράμματα Bode χαράζονται σε ημιλογαριθμικό χαρτί, με τη συχνότητα στη λογαριθμική κλίμακα και το μέτρο (dB) και τη γωνία φάσης (°) στη γραμμική κλίμακα. Η τυπική παράσταση του λογαριθμικού μέτρου είναι 20log10|G(jω)| και εκφράζεται σε μονάδες decibel (dB). Ορίζονται επίσης, τα διαστήματα των συχνοτήτων ως εξής:
![]()
όπου ω1 τυχαία συχνότητα.
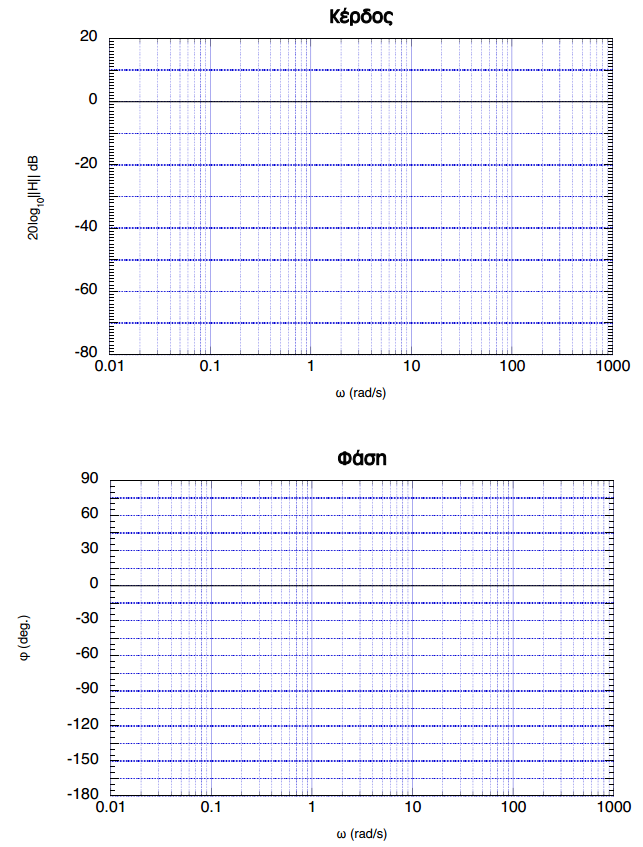
Σχήμα ΠΑΡ.Β.4. Ημιλογαριθμικά διαγράμματα Bode
Έστω το σύστημα ελέγχου με ανάδραση:
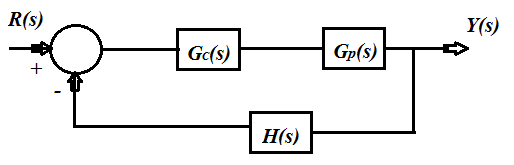
Σχήμα ΠΑΡ.Β.5. Σύστημα ελέγχου με ανάδραση
Ο μετασχηματισμός Laplace της εξόδου, εκφράζεται ως:
![]()
Το βασικό πλεονέκτημα των διαγραμμάτων Bode, είναι η μετατροπή των γινομένων του μέτρου, σε άθροισμα. Στη συνέχεια παρουσιάζονται τα διαγράμματα Bode των βασικών παραγόντων που πιθανόν να συνθέτουν κάποια ΣΜ:
• Κέρδος Κ:
Εφόσον είναι ένας σταθερός αριθμός, η τιμή του σε dB είναι:
![]()
Δηλαδή η λογαριθμική καμπύλη του μέτρου, είναι μια οριζόντια ευθεία στα 20log10K dB, ενώ ανάλογα αν το κέρδος είναι μεγαλύτερο ή μικρότερο της μονάδας η τιμή σε decibel είναι αντίστοιχα θετική ή αρνητική. Προφανώς ο παράγοντας του κέρδους έχει φάση φ=0°. Επίσης, δεκαπλασιασμός του κέρδους συνεπάγεται αύξηση 20 dB αφού:
![]()
Επίσης, ισχύει για τους αντίστροφους παράγοντες:
![]()
• Παράγοντες ολοκλήρωσης 1/jω:
Το λογαριθμικό μέτρο προκύπτει:
![]()
Δηλαδή η λογαριθμική καμπύλη του μέτρου είναι μια ευθεία με κλίση -20dB/δεκάδα ή -6 dB/οκτάβα, ενώ για ω=1 μηδενίζεται. Όσον αφορά τη γωνία φάσης:
![]()
Άρα είναι μια οριζόντια ευθεία στις -90 μοίρες.
Αν ο παράγοντας είναι υψωμένος σε δύναμη, δηλαδή (1/jω)n, τότε:
![]()
Άρα η λογαριθμική καμπύλη του μέτρου είναι ευθεία κλίσης -20n dB/δεκάδα και για τη γωνία φάσης, μια οριζόντια ευθεία στις φ = -90n°.
• Παράγοντες παραγώγισης jω:
Το λογαριθμικό μέτρο προκύπτει:
![]()
Δηλαδή η λογαριθμική καμπύλη του μέτρου είναι μια ευθεία με κλίση +20dB/δεκάδα ή +6 dB/οκτάβα, ενώ για ω=1 μηδενίζεται. Όσον αφορά τη γωνία φάσης:
![]()
Άρα είναι μια οριζόντια ευθεία στις 90 μοίρες.
Αν ο παράγοντας είναι υψωμένος σε δύναμη, δηλαδή (jω)n, τότε:
![]()
Άρα η λογαριθμική καμπύλη του μέτρου είναι ευθεία κλίσης 20n dB/δεκάδα και για τη γωνία φάσης, μια οριζόντια ευθεία στις φ = 90n°.
• Παράγοντες 1ης τάξης 1/(1+jωΤ):
Το λογαριθμικό μέτρο προκύπτει:
![]()
Για χαμηλές συχνότητες (ω << 1/Τ), προσεγγιστικά:
![]()
Δηλαδή η λογαριθμική καμπύλη του μέτρου είναι μια οριζόντια ευθεία στα 0 dB.
Για ψηλές συχνότητες (ω >> 1/Τ), προσεγγιστικά:
![]()
Εφόσον:
Άρα η λογαριθμική καμπύλη του μέτρου είναι ευθεία με κλίση -20 dB/δεκάδα. Δηλαδή ο παράγοντας αυτό προσεγγίζεται από δύο ασύμπτωτες ευθείες, οι οποίες τέμνονται στη λεγόμενη συχνότητα θλάσης ωb=1/Τ. Σε αυτή τη συχνότητα υφίσταται και η μεγαλύτερη απόκλιση από την πραγματική καμπύλη και είναι περίπου 3 dB.
Όσον αφορά τη γωνία φάσης:
Δηλαδή η καμπύλης της φάσης είναι ασυμπτωτική ως προς τις ευθείες που αντιστοιχούν στις 0° και -90°, ενώ περνά από τις -45° στη συχνότητα θλάσης. Η γωνία φάσης φ = -45° που αντιστοιχεί στη συχνότητα θλάσης ονομάζεται σημείο ανάκαμψης.
Αν ο παράγοντας είναι υψωμένος σε δύναμη, δηλαδή [1/(1+jωT)]-n, τότε:
![]()
Με την ίδια λογική προκύπτουν δύο ασύμπτωτες ευθείες, η χαμηλών συχνοτήτων οριζόντια στα 0 dB και των υψηλών συχνοτήτων κλίσης -20n dB/δεκάδα ενώ η γωνία φάσης, μεταβάλλεται φ = 0° → -90n°. Το σφάλμα που υπεισέρχεται, είναι n φορές μεγαλύτερο.
• Παράγοντες 1ης τάξης 1+jωΤ:
Το λογαριθμικό μέτρο προκύπτει:
![]()
Για χαμηλές συχνότητες (ω << 1/Τ) προσεγγιστικά:
![]()
Δηλαδή η λογαριθμική καμπύλη του μέτρου είναι μια οριζόντια ευθεία στα 0 dB.
Για ψηλές συχνότητες (ω >> 1/Τ) προσεγγιστικά:
![]()
Εφόσον:
Άρα η λογαριθμική καμπύλη του μέτρου είναι ευθεία με κλίση 20 dB/δεκάδα. Δηλαδή ο παράγοντας αυτό προσεγγίζεται από δύο ασύμπτωτες ευθείες, οι οποίες τέμνονται στη λεγόμενη συχνότητα θλάσης ωb=1/Τ. Σε αυτή τη συχνότητα υφίσταται και η μεγαλύτερη απόκλιση από την πραγματική καμπύλη και είναι περίπου 3 dB.
Όσον αφορά τη γωνία φάσης:
Δηλαδή η καμπύλης της φάσης είναι ασυμπτωτική ως προς τις ευθείες που αντιστοιχούν στις 0° και 90°, ενώ περνά από τις 45° στη συχνότητα θλάσης. Η γωνία φάσης φ = 45° που αντιστοιχεί στη συχνότητα θλάσης ονομάζεται σημείο ανάκαμψης.
Αν ο παράγοντας είναι υψωμένος σε δύναμη, δηλαδή (1+jωΤ)n, τότε:
![]()
Με την ίδια λογική προκύπτουν δύο ασύμπτωτες ευθείες, η χαμηλών συχνοτήτων οριζόντια στα 0 dB και των υψηλών συχνοτήτων κλίσης 20n dB/δεκάδα ενώ η γωνία φάσης, μεταβάλλεται φ = 0° → 90n°. Το σφάλμα που υπεισέρχεται, είναι n φορές μεγαλύτερο.
•
Παράγοντες 2ης τάξης ![]() :
:
Το λογαριθμικό μέτρο προκύπτει:
όπου ωn η συχνότητα θλάσης.
Για χαμηλές συχνότητες (ω << ωn), προσεγγιστικά:
![]()
Δηλαδή η λογαριθμική καμπύλη του μέτρου είναι μια οριζόντια ευθεία στα 0 dB.
Για ψηλές συχνότητες (ω >> ωn), προσεγγιστικά:
![]()
Εφόσον:
![]()
Άρα η λογαριθμική καμπύλη του μέτρου είναι ευθεία με κλίση ![]() 40
dB/δεκάδα. Οι δύο ασύμπτωτες ευθείες, τέμνονται στη
συχνότητα θλάσης ω=ωn ενώ
είναι ανεξάρτητες από την τιμή του ζ. Αυτό όμως δεν ισχύει για την ακριβή
καμπύλη όπως φαίνεται και στο σχήμα.
40
dB/δεκάδα. Οι δύο ασύμπτωτες ευθείες, τέμνονται στη
συχνότητα θλάσης ω=ωn ενώ
είναι ανεξάρτητες από την τιμή του ζ. Αυτό όμως δεν ισχύει για την ακριβή
καμπύλη όπως φαίνεται και στο σχήμα.
Η γωνία φάσης, αντικαθιστώντας u=ω/ωn προκύπτει ως:
![]()
Επίσης, ορίζεται η συχνότητα συντονισμού:
![]()
Β.3. Κανόνας του Cramer
Ο κανόνας του Cramer, είναι μια μέθοδος ταυτόχρονης επίλυσης ενός σετ γραμμικών αλγεβρικών εξισώσεων. Το σύστημα γράφεται στη μορφή:
![]()
όπου
• x, y: διανύσματα μεταβλητών (n x 1),
• Α: πίνακας συντελεστών.
Τότε:
![]()
![]()
δηλαδή:
Άρα προκύπτει για κάποιο στοιχείο i του διανύσματος ![]() :
:
![]()
όπου
• Aij: στοιχείο του πίνακα Α στη γραμμή i , στήλη j,
• Mij: υποορίζουσες πίνακα Α (Ορίζουσα του υποπίνακα που δημιουργείται αν διαγραφεί η γραμμή i και η στήλη j).
Δηλαδή καταλήγει στον υπολογισμό n υποοριζουσών για κάθε στοιχείο i του διανύσματος x, ενώ πρέπει να δίνεται ιδιαίτερη προσοχή στα πρόσημά τους ανάλογα με το άθροισμα (i + j).
Β.4. Περιγραφή στον χώρο κατάστασης
Ο αριθμός των μεταβλητών που απαιτείται ώστε να περιγραφεί πλήρως η κίνηση του συστήματος εξαρτάται από τους βαθμούς ελευθερίας που έχει το σύστημα. Έτσι, η κίνηση του συστήματος περιγράφεται από ένα πολυδιάστατο διάνυσμα που ονομάζεται χώρος κατάστασης και στο οποίο ο αριθμός των μεταβλητών κατάστασης ισούται με τον αριθμό των διαστάσεων. Η εξίσωση κίνησης ή διαφορετικά η εξίσωση κατάστασης ενός γραμμικού και χρονικά αμετάβλητου συστήματος, όπως παρουσιάζεται στο [11], γράφεται:
![]()
όπου
• x(t): διάνυσμα στήλη των n μεταβλητών κατάστασης που ονομάζεται διάνυσμα κατάστασης (state vector),
• u(t): διάνυσμα στήλη των m μεταβλητών κατάστασης που ονομάζεται διάνυσμα εισόδου (input vector),
• A: (n x n) μήτρα κατάστασης (state matrix),
• B: (n x m) μήτρα εισόδου (input matrix).
Με τον ορισμό χρονικά αμετάβλητο σύστημα, εννοείται ότι τα στοιχεία των πινάκων Α και Β είναι συναρτήσεις σταθερές, ανεξάρτητες του χρόνου. Η εξίσωση κατάστασης, είναι το ισοδύναμο σε μορφή πίνακα ενός συστήματος n γραμμικών διαφορικών εξισώσεων. Για πολλά συστήματα ορισμένες από τις μεταβλητές κατάστασης μπορεί να μην είναι δυνατόν να καθοριστούν άμεσα. Έτσι, απαιτείται μια δεύτερη εξίσωση ώστε να καθοριστούν οι μεταβλητές εξόδου του συστήματος. Η εξίσωση εξόδου γράφεται στη γενική μορφή :
![]()
όπου
• y(t): διάνυσμα στήλη των r μεταβλητών εξόδου που ονομάζεται διάνυσμα εξόδου (output vector),
• C: (r x n) μήτρα εξόδου (output matrix),
• D: (r x m) άμεση μήτρα.
Τυπικά ισχύει r = n, ενώ για γραμμικά και χρονικά αμετάβλητα συστήματα οι μήτρες C και D έχουν σταθερά στοιχεία. Οι δύο παραπάνω εξισώσεις όταν χρησιμοποιηθούν συγχρόνως περιγράφουν πλήρως το σύστημα. Για τα περισσότερα προβλήματα που αφορούν τα αεροσκάφη μας διευκολύνει η επιλογή των μεταβλητών εξόδου ως μεταβλητές κατάστασης, δηλαδή:
![]()
Επομένως:
• [C] = [I] (n x m) μοναδιαία μήτρα,
• [D] = [0] (n x m) μηδενική μήτρα.
Εν τέλει το σύστημα παίρνει την ακόλουθη μορφή:
![]()
![]()
Β.4.1. Επίλυση και χρονική απόκριση συστήματος
Εκτελώντας τον μετασχηματισμό Laplace στην εξίσωση κατάστασης, λαμβάνεται το σύστημα αλγεβρικών εξισώσεων:
![]()
Η πλήρης λύση του συστήματος προκύπτει από το άθροισμα της μερικής λύσης xc(t) και της ειδικής λύσης xp(t).
Η μερική λύση προκύπτει
από την επίλυση της ομογενούς εξίσωσης ![]() με
x(0) γνωστό, μέσω του αντίστροφου
μετασχηματισμού Laplace:
με
x(0) γνωστό, μέσω του αντίστροφου
μετασχηματισμού Laplace:
![]()
Επειδή όμως μπορεί να αποδειχθεί ότι:
όπου η eΑt ονομάζεται εκθετική μήτρα. Τότε η λύση της ομογενούς καταλήγει στην:
![]()
Από την επίλυση της
μη-ομογενούς εξίσωσης κατάστασης ![]() και
υποθέτοντας μια λύση της μορφής xp(t)=eAtP(t) εξάγεται η ειδική λύση ως:
και
υποθέτοντας μια λύση της μορφής xp(t)=eAtP(t) εξάγεται η ειδική λύση ως:
![]()
Πλέον η πλήρης λύση προκύπτει:
Β.4.2. Ιδιοτιμές και ιδιοδιανύσματα
Η χαρακτηριστική εξίσωση του συστήματος προκύπτει ως εξής:
![]()
Οι ρίζες λ1,λ2,...,λn της χαρακτηριστικής εξίσωσης ονομάζονται ιδιοτιμές του πίνακα Α ή πόλοι του συστήματος. Οι πόλοι ενός συστήματος, δηλαδή οι ιδιοτιμές καθορίζουν την ευστάθεια ή/και τη συμπεριφορά και μεταβατική απόκριση του.
Ο υπολογισμός των ιδιοδιανυσμάτων προκύπτει από τη σχέση:
![]()
όπου για κάθε ιδιοτιμή λn υπάρχει ένα ιδιοδιάνυσμα Φn:

Και ο πίνακας των ιδιοδιανυσμάτων του οποίου η κάθε στήλη είναι
το Φn της ![]() ιδιοτιμής:
ιδιοτιμής:
Β.4.3. Διαγωνοποίηση μήτρας κατάστασης Α-Εκθετικός πίνακας
Από τη θεωρία της ομοιότητας παραστάσεων για ένα σύστημα στον χώρο κατάστασης, προκύπτει μετασχηματισμός, ο οποίος μετατρέπει ένα πίνακα Α σε ένα διαγώνιο πίνακα Λ και δίνεται από το εξής θεώρημα:
Έστω σταθερός πίνακας Αnxn με διακεκριμένες ιδιοτιμές λ1,λ2,....,λn και πίνακα ιδιοδιανυσμάτων Vnxn. Ισχύει:
![]()
όπου Λnxn ο διαγώνιος πίνακας των ιδιοτιμών:
Τότε πολλαπλασιάζοντας κατάλληλα δεξιά και αριστερά, προκύπτει:
![]()
όπου eΛt ο εκθετικός πίνακας:
Ο οποίος πολλαπλασιαζόμενος με τον πίνακα των ιδιοδιανυσμάτων V, δίνει το μητρώο των ιδιοσυναρτήσεων:
![]()
Θέτοντας:
Η λύση της ομογενούς ![]() με
x(0) γνωστό:
με
x(0) γνωστό:
Για αυτή τη μορφή της λύσης μπορεί να σχολιαστεί:
•
![]() :
καθορίζει τη μορφή της χρονικής απόκρισης.
:
καθορίζει τη μορφή της χρονικής απόκρισης.
• Φi: καθορίζει το μέγεθος της συνεισφοράς της κάθε κατάστασης στη μορφή της απόκρισης.
• βi: καθορίζει το μέγεθος της διέγερσης της μορφής λόγω της αρχικής συνθήκης.
Ενώ ανάλογα με τη μορφή της ιδιοτιμής:
• λi πραγματική: αύξουσα ή φθίνουσα εκθετική απόκριση,
• λi μιγαδική: αύξουσα ή φθίνουσα αποσβενόμενη εκθετική ημιτονοειδής απόκριση.
Β.4.4. Κατευθυντές ανάδρασης-Τοποθέτηση πόλων
Για την επίτευξη της απαιτούμενης ευστάθειας και συμπεριφοράς του συστήματος πρέπει να γίνει κατάλληλη επιλογή της θέσης των πόλων του, δηλαδή των ιδιοτιμών.
Ο σχεδιασμός ενός κατευθυντή, όπως παρουσιάζεται στο [11] έχει σκοπό να δίνει τη δυνατότητα μετατόπισης των πόλων. Ο κατευθυντής ουσιαστικά είναι μια κατάλληλη συνάρτηση μεταφοράς ή απλά ένα κέρδος που πολλαπλασιάζεται στο σήμα που λαμβάνεται από το σύστημα και ανατροφοδοτείται (feedback) στο σήμα εισόδου.
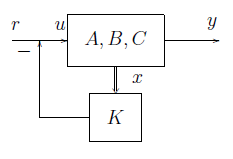
Σχήμα ΠΑΡ.Β.6 ΣΑΕ με ανατροφοδότηση του πλήρους διανύσματος κατάστασης.
Επιλέγοντας το κέρδος του μπορεί να επιτευχθεί η επιθυμητή μετατόπιση των πόλων. Στο τυπικό σύστημα που φαίνεται στο σχήμα ΠΑΡ.Β.6, για μοναδική είσοδο u, είσοδο αναφοράς r και D=[0], ισχύει:
![]()
όπου το κέρδος:
Για r=0, ένας τέτοιος κατευθυντής ονομάζεται ρυθμιστής. Πλέον οι εξισώσεις κατάστασης για τον κλειστό βρόγχο γίνονται:
Τότε η χαρακτηριστική εξίσωσης του συστήματος:
![]()
Αφού υπολογιστεί η παράσταση της χαρακτηριστικής εξίσωσης, προφανώς μπορούν να επιλεγούν τα κατάλληλα k1, k2... ώστε να προκύψουν οι επιθυμητοί πόλοι.
Β.4.5. Ελεγξιμότητα
Απαραίτητη προϋπόθεση για την εφαρμογή της μεθόδου τοποθέτησης πόλων, είναι η ελεγξιμότητα του συστήματος, δηλαδή του ζεύγους (Α,Β). Ελεγξιμότητα σημαίνει ότι είναι δυνατός ο ορισμός n ανεξάρτητων διανυσμάτων ελέγχου, τα οποία καλύπτουν όλο τον χώρο κατάστασης.
Ο πίνακας ελεγξιμότητας Q, ορίζεται ως:
![]()
Για να είναι το σύστημα πλήρως ελέγξιμο, πρέπει να ισχύει:
![]()
Ο βαθμός (rank), ενός πίνακα, αντιστοιχεί στον μέγιστο τετραγωνικό υποπίνακα του που είναι ομαλός. Η εύρεση του βαθμού είναι κοπιαστική διαδικασία και γίνεται συνήθως με Η/Υ. Συγκεκριμένα για το λογισμικό Matlab, υπάρχουν οι εξής σχετικές εντολές:
• rank(Q): υπολογίζει τον βαθμό του πίνακα.
• Q=ctrb(A,B): υπολογίζει τον πίνακα ελεγξιμότητας.
Β.5. Σχέση μεταξύ εξισώσεων κατάστασης και μήτρας μεταφοράς
Από τον μετασχηματισμό Laplace του συστήματος των εξισώσεων κατάστασης:
![]()
Αντικαθιστώντας το διάνυσμα κατάστασης x(t) στην εξίσωση εξόδου:
![]()
Προκύπτει:
![]()
Έτσι, ορίζεται η μήτρα μεταφοράς, δηλαδή ο λόγος του διανύσματος εξόδου προς το διάνυσμα εισόδου, ως εξής:
![]()
Η οποία μήτρα μεταφοράς περιέχει όλες τις συναρτήσεις μεταφοράς του συστήματος των r μεταβλητών εξόδου προς τις m μεταβλητές εισόδου :
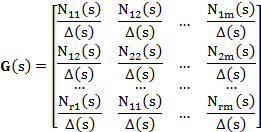
Γ. Οι συναρτήσεις μεταφοράς του αεροσκάφους
Στο κεφάλαιο 3, διατυπώθηκαν οι αποσυζευγμένες διαμήκεις εξισώσεις κίνησης μικρών διαταραχών:

Και επιπλέον:
![]()
Μετασχηματίζοντας κατά Laplace τις εξισώσεις αυτές, προκύπτει:

Το σετ αυτό των εξισώσεων, μπορεί να γραφτεί σε μητρωϊκή μορφή ως εξής:

Πλέον είναι δυνατή η εξαγωγή των ΣΜ προς την επιθυμητή είσοδο, μηδενίζοντας την άλλη. Για παράδειγμα οι ΣΜ προς το πηδάλιο ανόδου-καθόδου προκύπτει μηδενίζοντας το δp(s), τότε το σύστημα γίνεται:

Για να εκφραστεί το σύστημα στη μορφή Αnxnx=y και να μπορεί να εφαρμοστεί ο κανόνας του Cramer, διαιρείται με την είσοδο δe(s) και το σύστημα γίνεται:
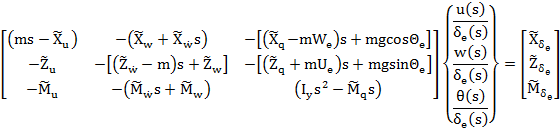
Τότε, εφαρμόζοντας τον κανόνα του Cramer προκύπτουν οι ΣΜ:
![]()
Ενώ προκύπτει άμεσα:
![]()
Γ.1. Πολυώνυμα αριθμητών διαμήκων ΣΜ ως προς την εντολή του πηδαλίου ανόδου-καθόδου
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Οι διαμήκεις συναρτήσεις μεταφοράς ως προς την ώση,
προκύπτουν θεωρώντας ότι το πηδάλιο ανόδου-καθόδου διατηρείται σταθερά στη θέση
αντιστάθμισης, δηλαδή δe(s)=0
και αντικαθιστώντας το δp(s) στη θέση του δe(s). Στη συνέχεια οι παράγωγοι
ευστάθειας ![]() αντικαθίστανται
αντίστοιχα από τις
αντικαθίστανται
αντίστοιχα από τις ![]() .
.
Γ.2. Χαρακτηριστικό πολυώνυμο διαμήκων ΣΜ
|
|
|
|
|
|
Γ.3. Σύνοψη – Πλήρως ανεπτυγμένες συναρτήσεις μεταφοράς αεροσκάφους ως προς το σωματόδετο σύστημα αξόνων του
Ακολουθώντας τη διαδικασία που αναπτύχθηκε πιο πάνω, εξάγονται και οι εγκάρσιες–διεύθυνσης συναρτήσεις μεταφοράς. Πλέον αναπτύσσοντας τις ορίζουσες και εκτελώντας τις απαραίτητες πράξεις, μπορούν να διατυπωθούν όλες οι συναρτήσεις μεταφοράς του αεροσκάφους ως προς το σωματόδετο σύστημα αξόνων του, υπό τη μορφή πολυωνύμων του s με σταθερούς συντελεστές.
Γ.3.1. Διαμήκεις συναρτήσεις μεταφοράς ως προς το σωματόδετο σύστημα αξόνων του αεροσκάφους
![]()
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Όμοια οι πιο πάνω συναρτήσεις μεταφοράς περιγράφουν την απόκριση
ως προς την ώση του κινητήρα εφόσον αντικατασταθεί το σύμβολο ![]() με
το σύμβολο
με
το σύμβολο ![]() στις
αεροδυναμικές παραγώγους και τις παραγώγους ελέγχου ώστε να προκύψουν οι:
στις
αεροδυναμικές παραγώγους και τις παραγώγους ελέγχου ώστε να προκύψουν οι:
![]()
Γ.3.2.Εγκάρσιες-διεύθυνσης συναρτήσεις μεταφοράς ως προς το σωματόδετο σύστημα αξόνων του αεροσκάφους
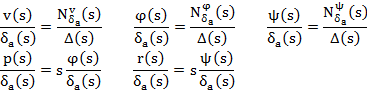
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Όμοια οι πιο πάνω συναρτήσεις μεταφοράς περιγράφουν την απόκριση ως προς πηδάλιο διεύθυνσης εφόσον αντικατασταθεί το σύμβολο δa με το σύμβολο δr στις αεροδυναμικές παραγώγους και τις παραγώγους ελέγχου ώστε να προκύψουν οι:
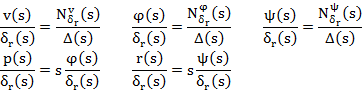
Δ. Οι εξισώσεις κίνησης του αεροσκάφους στον χώρο κατάστασης
Για να παρουσιαστεί ο τρόπος εξαγωγής της εξίσωση κατάστασης από τις εξισώσεις κίνησης του αεροσκάφους, θεωρούνται οι διαμήκεις εξισώσεις κίνησης που αναφέρονται στο σωματόδετο σύστημα αξόνων. Αυτές οι εξισώσεις μπορούν να ξαναγραφούν με τους όρους της επιτάχυνσης στο αριστερό μέρος ως ακολούθως:

Εφόσον περιγράφεται η διαμήκης κίνηση του αεροσκάφους με τέσσερις μεταβλητές κατάστασης δηλ. τις u, w, q και θ, απαιτούνται τέσσερις διαφορικές εξισώσεις. Έτσι, η επιπλέον εξίσωση θα είναι η βοηθητική εξίσωση που συσχετίζει τον ρυθμό πρόνευσης με τον ρυθμό μεταβολής της στάσης του αεροσκάφους, δηλαδή η παρακάτω εξίσωση που ισχύει για μικρές διαταραχές :
![]()
Οι δύο πιο πάνω εξισώσεις, μπορούν να συνδυαστούν και να γραφούν στη μορφή μιας διανυσματικής-μητρικής διαφορικής εξίσωσης ως εξής :
Οι πίνακες των συντελεστών για τις διαμήκεις εξισώσεις κίνησης M, A και Β, είναι:

Η διαμήκης εξίσωση κίνησης, προκύπτει πολλαπλασιάζοντας την εξίσωση με το αντίστροφο μητρώο της μάζας Μ, δηλαδή:
![]()
με

Οι συντελεστές της μήτρας κατάστασης Α περιλαμβάνουν τις συντετμημένες αεροδυναμικές παραγώγους ευστάθειας που αναφέρονται στο σωματόδετο σύστημα αξόνων. Η μήτρα εισόδου Β περιλαμβάνει τις παραγώγους ελέγχου πάλι σε συντετμημένη μορφή. Με όμοιο τρόπο προκύπτουν οι αντίστοιχοι πίνακες που αφορούν τις εγκάρσιες εξισώσεις κίνησης.
Δ.1. Αδιαστατοποίηση των εξισώσεων κίνησης
Η αδιαστατοποίηση των εξισώσεων, όπως παρουσιάζει ο Cook [3], αφορά κυρίως την απλοποίηση των εκφράσεων των παραγώγων ευστάθειας, όπως θα φανεί στη συνέχεια, ενώ παράλληλα παρέχουν μια πιο ποιοτική μορφή των αποκρίσεων των μεταβλητών κατάστασης. Θεωρούνται οι αποσυζευγμένες εξισώσεις κίνησης του αεροσκάφους:


Η παράμετρος αεροδυναμικής δύναμης με την οποία διαιρούνται οι εξισώσεις των δυνάμεων Χ,Υ και Ζ για να αδιαστατοποιηθούν είναι:
![]()
Το διάμηκες μήκος αναφοράς είναι η μέση αεροδυναμική χορδή ![]() ,
ενώ το εγκάρσιο μήκος αναφοράς είναι το εκπέτασμα της πτέρυγας b. Έτσι, η παράμετρος αεροδυναμικής ροπής με την οποία διαιρείται
η διαμήκης εξίσωση τις ροπής M για να αδιαστατοποιηθεί
είναι:
,
ενώ το εγκάρσιο μήκος αναφοράς είναι το εκπέτασμα της πτέρυγας b. Έτσι, η παράμετρος αεροδυναμικής ροπής με την οποία διαιρείται
η διαμήκης εξίσωση τις ροπής M για να αδιαστατοποιηθεί
είναι:
![]()
Ενώ οι εγκάρσιες εξισώσεις των ροπών L και Ν διαιρούνται με την :
![]()
Όσον αφορά τη διαμήκη δυναμική, ορίζονται επίσης τα εξής μεγέθη:

όπου
• μ1: σχετικός διαμήκης παράγοντας πυκνότητας,
•
![]() :
αδιάστατες ταχύτητες,
:
αδιάστατες ταχύτητες,
•
![]() :
αδιάστατη γωνιακή ταχύτητα,
:
αδιάστατη γωνιακή ταχύτητα,
•
![]() :
αδιάστατος χρόνος,
:
αδιάστατος χρόνος,
• m: μάζα αεροσκάφους.
Ενώ παραγωγίζοντας π.χ. την αδιάστατη ταχύτητα:

Αντίστοιχα στη εγκάρσια δυναμική:
όπου
• ix, iz, ixz: αδιάστατες ροπές και γινόμενα αδρανείας,
•
![]() :
αδιάστατη ταχύτητα,
:
αδιάστατη ταχύτητα,
•
![]() :
αδιάστατες γωνιακές ταχύτητες,
:
αδιάστατες γωνιακές ταχύτητες,
• μ2: σχετικός εγκάρσιος παράγοντας πυκνότητας.
Λαμβάνοντας για παράδειγμα την εξίσωση της συνιστώσας της δύναμης Χ και διαιρώντας με την παράμετρο της αεροδυναμικής δύναμης:

Υποθέτοντας οριζόντια πτήση ![]() τότε
βάσει των μεγεθών που έχουν οριστεί και σε αντιστοιχία με τους ορισμούς των
αεροδυναμικών συντελεστών (CL, CD, CM)
γίνεται:
τότε
βάσει των μεγεθών που έχουν οριστεί και σε αντιστοιχία με τους ορισμούς των
αεροδυναμικών συντελεστών (CL, CD, CM)
γίνεται:

Η αδιάστατη εξίσωση γράφεται πλέον:
![]()
Ενώ ορίζονται οι αδιάστατες παράγωγοι ευστάθειας:

Όμοια αδιαστατοποιούνται και οι υπόλοιπες αποσυζευγμένες εξισώσεις κίνησης εισάγοντας και την υπόθεση ότι εκτός από οριζόντια πτήση, οι άξονες αναφοράς είναι οι άξονες ανέμου (Θe = We = 0):
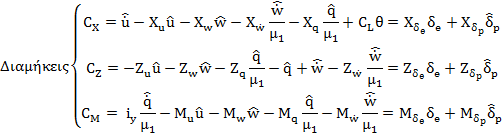
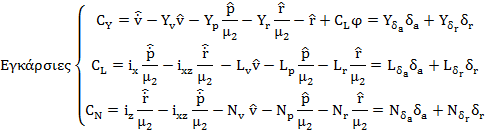
Οι εκφράσεις των αδιάστατων παραγώγων παρουσιάζονται συνοπτικά στις αντίστοιχες παραγράφους που ακολουθούν.
Δ.2. Διαμήκεις εξισώσεις κίνησης στο χώρο κατάστασης
Με τη μεθοδολογία που αναπτύχθηκε στην εισαγωγή του
παραρτήματος Δ, προκύπτει η διαμήκης εξίσωση κατάστασης στη μορφή ![]() ως
εξής:
ως
εξής:
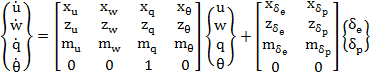
Ενώ η εξίσωση εξόδου:
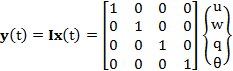
Παρατηρείται ότι οι διαμήκεις εξισώσεις κίνησης των μικρών διαταραχών περιγράφονται πλήρως από τις τέσσερις μεταβλητές κατάστασης u, w, q και θ. Η εξίσωση εξόδου, δείχνει ακριβώς ότι για την περίπτωση αυτή οι μεταβλητές εξόδου έχουν επιλεγεί ώστε να ταυτίζονται με τις τέσσερις μεταβλητές κατάστασης.
Στη συνέχεια δίνονται οι πίνακες Μ, A’ και B’, ως προς τις αδιάστατες παραγώγους ευστάθειας:
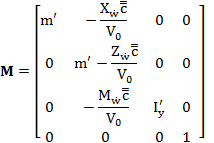

Δ.2.1. Διαμήκεις συντετμημένες παράγωγοι ευστάθειας ως προς τις διαστατές παραγώγους ευστάθειας
|
Αεροδυναμικές |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
||
|
|
|
|
|
|
|
|
Δ.2.2. Διαμήκεις αδιάστατες παράγωγοι ευστάθειας ως προς τις διαστατές παραγώγους ευστάθειας
|
Αεροδυναμικές |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
||
|
|
|
|
|
|
|
|
Δ.3. Εγκάρσιες εξισώσεις κίνησης στον χώρο κατάστασης
Αντίστοιχα οι εγκάρσιες εξισώσεις κατάστασης μπορούν να προκύψουν από τις εγκάρσιες εξισώσεις κίνησης (3.58) που αναφέρονται στο σωματόδετο σύστημα αξόνων και να παρασταθούν στη μορφή του χώρου κατάστασης ως εξής:
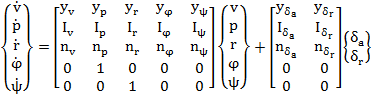
Σημειώνεται ότι, όταν οι εγκάρσιες εξισώσεις κίνησης αναφέρονται στους άξονες του ανέμου, οι εγκάρσιες εξισώσεις κίνησης ελαττώνονται από πέμπτης σε τέταρτης τάξης :
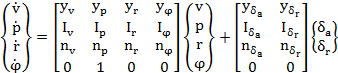
Όμως σε αυτή την περίπτωση οι παράγωγοι αναφέρονται στους άξονες του ανέμου του αεροσκάφους και όχι στο σωματόδετο σύστημα και επομένως θα έχουν λίγο διαφορετικές τιμές. Ο ορισμός των συντετμημένων μορφών των παραγώγων ευστάθειας ως προς το σωματόδετο σύστημα, δίνεται επίσης στο παράρτημα Δ.3.1. Στη συνέχεια δίνονται οι πίνακες Μ, Α’ και Β’, ως προς τις αδιάστατες παραγώγους ευστάθειας:

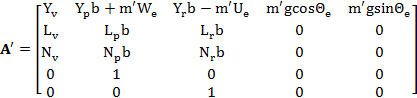
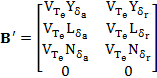
Δ.3.1. Εγκάρσιες συντετμημένες παράγωγοι ευστάθειας ως προς τις διαστατές παραγώγους ευστάθειας
|
Αεροδυναμικές |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
||
|
|
|
|
|
|
|
|
Δ.3.2. Εγκάρσιες αδιάστατες παράγωγοι ευστάθειας ως προς τις διαστατές παραγώγους ευστάθειας
|
Αεροδυναμικές |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
||
|
|
|
|
|
|
|
|
Δ.4. Βορειοαμερικανική σημειολογία
Συνδυάζοντας διάφορες πηγές [3], [5], [12], καταγράφονται οι εκφράσεις των παραγώγων ευστάθειας και ελέγχου, που χρησιμοποιούνται στη βορειοαμερικανική ανάλυση.
Δ.4.1. Διαμήκεις διαστατές παράγωγοι ευστάθειας ως προς τις αδιάστατες βορειοαμερικανικές παράγωγους ευστάθειας
|
Αεροδυναμικές |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
|||||
|
|
|
|
|
|
|

Δ.4.2. Διαμήκεις συντετμημένες παράγωγοι ευστάθειας ως προς τις διαστατές βορειοαμερικανικές παραγώγους ευστάθειας
Πρακτικά, οι παράγωγοι Ζq και ![]() ,
συνεισφέρουν ελάχιστα στην απόκριση του αεροσκάφους και συνήθως αμελούνται. Η
παραδοχή αυτή περιλαμβάνεται στις εκφράσεις των συντετμημένων παραγώγων που
ακολουθούν και οι οποίες χρησιμοποιούνται κατά την έκφραση των εξισώσεων
κίνησης στον χώρο κατάστασης.
,
συνεισφέρουν ελάχιστα στην απόκριση του αεροσκάφους και συνήθως αμελούνται. Η
παραδοχή αυτή περιλαμβάνεται στις εκφράσεις των συντετμημένων παραγώγων που
ακολουθούν και οι οποίες χρησιμοποιούνται κατά την έκφραση των εξισώσεων
κίνησης στον χώρο κατάστασης.
|
Αεροδυναμικές |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
||
|
|
|
|
|
|
|
|
Δ.4.3. Εγκάρσιες διαστατές παράγωγοι ευστάθειας ως προς τις αδιάστατες βορειοαμερικανικές παράγωγους ευστάθειας
|
Αεροδυναμικές |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δ.4.4. Εγκάρσιες συντετμημένες παράγωγοι ευστάθειας ως προς τις διαστατές βορειοαμερικανικές παραγώγους ευστάθειας
|
Σύντομες εκφράσεις |
|
|
Αεροδυναμικές |
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
|
|
|
|
|
|
|
|
Συντετμημένες παράγωγοι ευστάθειας |
||
|
Αεροδυναμικές |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
||
|
|
|
|
|
|
|
|
Ε. Προσεγγιστικές εκφράσεις για τις διαστατές αεροδυναμικές παραγώγους ευστάθειας και ελέγχου
|
Διαμήκεις |
Εγκάρσιες |
|
|
Αεροδυναμικές |
Αεροδυναμικές |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ελέγχου |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Διαιρώντας με τους κατάλληλους όρους όπως παρουσιάστηκε στο παράρτημα Δ.1., προκύπτουν οι αντίστοιχες αδιάστατες παράγωγοι.
ΣΤ. Μετασχηματισμοί παραγώγων ευστάθειας από το σωματόδετο στο αεροδυναμικό σύστημα
|
Άξονες ανέμου (Οxwywzw) |
Σωματόδετοι άξονες (Οxbybzb) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ζ. Μονάδες μέτρησης, μετατροπές και σταθερές
|
Σταθερές |
Αγγλοσαξωνικό |
SI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Η. Δεδομένα αεροσκαφών
Η.1. Boeing 747-100
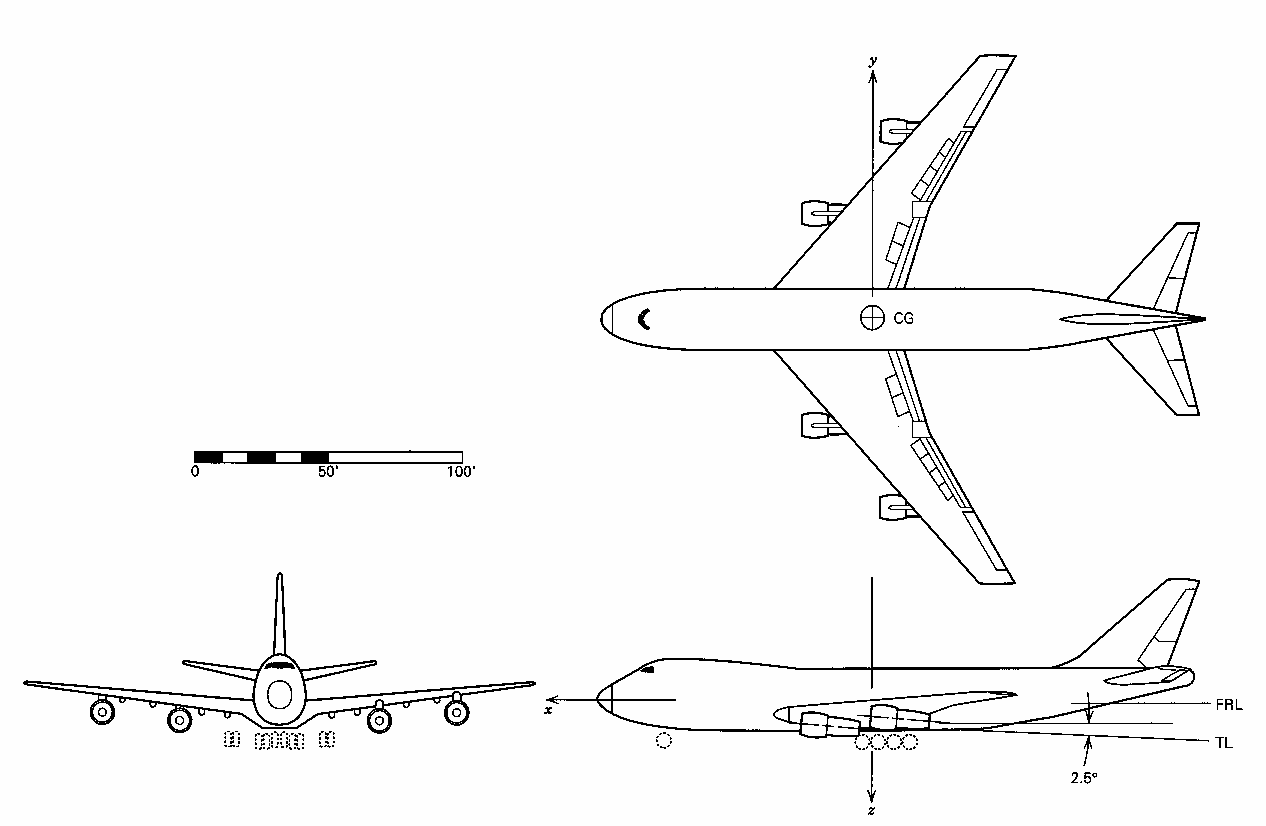
Σχήμα Παρ.H.1. Τρεις όψεις αεροσκάφους Boeing 747-100
Η αρχή των αξόνων του σωματόδετου συστήματος (Oxbybzb) βρίσκεται στο κέντρο βάρος (CG) του αεροσκάφους. Ο άξονας Oxb κείται πάνω στον διαμήκη άξονα του αεροσκάφους FRL. Η γραμμή της ώσης (TL-Thrust Line) σχηματίζει γωνία 2.5° σε σχέση με την FRL. Εξετάζονται τρεις συνθήκες πτήσης, όπου όλες αντιπροσωπεύουν ευθεία και οριζόντια πτήση σε δεδομένο ύψος.
• 1η περίπτωση: Το αεροσκάφος έχει διαμόρφωση προσγείωσης, με 30° πτερύγια καμπυλότητας (flaps), σύστημα προσγείωσης εκτεταμένο, ταχύτητα 20% μεγαλύτερη από την ταχύτητα απώλειας στήριξης και φυσικά μικρή ποσότητα καυσίμου στις δεξαμενές του.
• 2η και 3η περίπτωση: Το αεροσκάφος βρίσκεται σε πλεύση, με το σύστημα προσγείωσης εντός της ατράκτου και τα πτερύγια καμπυλότητας επίσης σε θέση πάνω. Οι ροπές αδράνειας δίνονται σε σχέση με το σωματόδετο σύστημα αξόνων. Οι παράγωγοι ευστάθειας δίνονται σε διαστατή μορφή.
|
Γεωμετρία Αναφοράς |
|||||||||
|
|
5500 |
||||||||
|
|
27.31 |
||||||||
|
|
195.68 |
||||||||
|
Δεδομένα Μάζας |
1η περίπτωση |
2η περίπτωση |
3η περίπτωση |
||||||
|
W [lbs] |
5.640x105 |
6.366x105 |
6.366x105 |
||||||
|
|
1.42x107 |
1.82x107 |
1.82x107 |
||||||
|
|
3.23x107 |
3.31x107 |
3.31x107 |
||||||
|
|
4.54x107 |
4.97x107 |
4.97x107 |
||||||
|
|
8.70x105 |
9.70x105 |
9.70x105 |
||||||
|
Δεδομένα Συνθηκών Πτήσης |
1η περίπτωση |
2η περίπτωση |
3η περίπτωση |
||||||
|
Υψόμετρο: h [ft] |
0 |
20000 |
40000 |
||||||
|
Αριθμός Mach: M |
0.2 |
0.5 |
0.9 |
||||||
|
Ταχύτητα αντιστάθμισης: |
221 |
518 |
871 |
||||||
|
Συντελεστής αντίστασης: CD |
34.3 |
134.6 |
134.6 |
||||||
|
Θέση κέντρου βάρους [% |
0.25 |
0.25 |
0.25 |
||||||
|
Γωνία πρόσπτωσης: αe [°] |
-8.5 |
-6.8 |
-2.4 |
||||||
|
Διαμήκεις παράγωγοι ευστάθειας (Διαστατοί, Σωματόδετοι άξονες) |
|||||||||
|
|
1η περίπτωση |
2η περίπτωση |
3η περίπτωση |
||||||
|
|
-3.661x102 |
-4.883x101 |
-3.954x102 |
||||||
|
|
2.137x103 |
1.546x103 |
-3.144x102 |
||||||
|
|
0 |
0 |
0 |
||||||
|
|
0 |
0 |
0 |
||||||
|
|
1.680x104 |
3.994x104 |
1.544x104 |
||||||
|
|
-3.538x103 |
-1.342x103 |
-8.383x102 |
||||||
|
|
-8.969x103 |
-8.561x103 |
-7.928x103 |
||||||
|
|
5.851x102 |
3.104x102 |
1.214x102 |
||||||
|
|
-1.090x105 |
-1.263x105 |
-1.327x105 |
||||||
|
|
-1.125x105 |
-3.341x105 |
-3.677x105 |
||||||
|
|
3.779x103 |
8.176x103 |
-2.062x103 |
||||||
|
|
-5.717x104 |
-5.627x104 |
-6.289x104 |
||||||
|
|
-7.946x103 |
-4.138x103 |
-5.296x103 |
||||||
|
|
-1.153x107 |
-1.394x107 |
-1.327x107 |
||||||
|
|
-1.221x107 |
-3.608x107 |
-4.038x107 |
||||||
|
Εγκάρσιοι-διεύθυνσης παράγωγοι ευστάθειας (Διαστατοί, Σωματόδετοι άξονες) |
|||||||||
|
|
1η περίπτωση |
2η περίπτωση |
3η περίπτωση |
||||||
|
|
-1.559x103 |
-1.625x103 |
-1.198x103 |
||||||
|
|
0 |
0 |
0 |
||||||
|
|
0 |
0 |
0 |
||||||
|
|
0 |
0 |
0 |
||||||
|
|
5.729x104 |
1.342x105 |
-7.990x104 |
||||||
|
|
-8.612x104 |
-7.281x104 |
-2.866x104 |
||||||
|
|
-1.370x107 |
-1.180x107 |
-8.357x106 |
||||||
|
|
-4.832x106 |
6.979x106 |
-5.233x106 |
||||||
|
|
-3.200x106 |
-2.312x106 |
-3.391x106 |
||||||
|
|
1.034x106 |
3.073x106 |
2.249x106 |
||||||
|
|
3.975x104 |
4.404x104 |
5.688x104 |
||||||
|
|
-6.688x106 |
-2.852x106 |
-5.864x105 |
||||||
|
|
-1.014x107 |
-7.323x106 |
-7.279x106 |
||||||
|
|
-1.001x106 |
-7.555x105 |
4.841x105 |
||||||
|
|
-6.911x106 |
-1.958x107 |
-2.206x107 |
||||||
Η.2. Learjet 24
Σχήμα Παρ.H.2. Τρεις όψεις αεροσκάφους Learjet 24
|
Γεωμετρία Αναφοράς |
||||||||||
|
|
230 |
|||||||||
|
|
7.0 |
|||||||||
|
|
34.0 |
|||||||||
|
Δεδομένα Μάζας |
Προσέγγιση |
Πλεύση (Μέγ. Βάρος) |
Πλεύση (Ελάχ. Βάρος) |
|||||||
|
W [lbs] |
13000 |
13000 |
9000 |
|||||||
|
|
28000 |
28000 |
6000 |
|||||||
|
|
18800 |
18800 |
17800 |
|||||||
|
|
47000 |
47000 |
25000 |
|||||||
|
|
1300 |
1300 |
1400 |
|||||||
|
Δεδομένα Συνθηκών Πτήσης |
Προσέγγιση |
Πλεύση (Μέγ. Βάρος) |
Πλεύση (Ελάχ. Βάρος) |
|||||||
|
Υψόμετρο: h [ft] |
0 |
40000 |
40000 |
|||||||
|
Αριθμός Mach: M |
0.152 |
0.7 |
0.7 |
|||||||
|
Ταχύτητα αντιστάθμισης: |
170 |
677 |
677 |
|||||||
|
Δυναμική πίεση: Q [lbs/ft2] |
34.3 |
134.6 |
134.6 |
|||||||
|
Θέση κέντρου βάρους [% |
0.32 |
0.32 |
0.32 |
|||||||
|
Γωνία πρόσπτωσης αe[°] |
5 |
2.7 |
1.5 |
|||||||
|
Συντελεστές μόνιμης κατάστασης |
Προσέγγιση |
Πλεύση (Μέγ. Βάρος) |
Πλεύση (Ελάχ. Βάρος) |
|||||||
|
|
1.64 |
0.41 |
0.28 |
|||||||
|
|
0.2560 |
0.0335 |
0.0279 |
|||||||
|
|
0.2560 |
0.0335 |
0.0279 |
|||||||
|
|
0 |
0 |
0 |
|||||||
|
|
0 |
0 |
0 |
|||||||
|
Διαμήκεις συντελεστές και παράγωγοι ευστάθειας (Αδιάστατοι, Άξονες ευστάθειας) |
||||||||||
|
|
Προσέγγιση |
Πλεύση (Μέγ. Βάρος) |
Πλεύση (Ελάχ. Βάρος) |
|||||||
|
|
0.0431 |
0.0216 |
0.0216 |
|||||||
|
|
0 |
0.104 |
0.104 |
|||||||
|
|
1.06 |
0.3 |
0.22 |
|||||||
|
|
-0.60 |
-0.07 |
-0.07 |
|||||||
|
|
1.2 |
0.13 |
0.13 |
|||||||
|
|
0.04 |
0.40 |
0.28 |
|||||||
|
|
5.04 |
5.84 |
5.84 |
|||||||
|
|
1.6 |
2.2 |
2.2 |
|||||||
|
|
4.1 |
4.7 |
4.7 |
|||||||
|
|
0.047 |
0.050 |
0.050 |
|||||||
|
|
-0.01 |
0.050 |
0.070 |
|||||||
|
|
-0.66 |
-0.64 |
-0.64 |
|||||||
|
|
-5.0 |
-6.7 |
-6.7 |
|||||||
|
|
-13.5 |
-15.5 |
-15.5 |
|||||||
|
|
0.006 |
-0.003 |
-0.003 |
|||||||
|
|
0 |
0 |
0 |
|||||||
|
Διαμήκεις παράγωγοι ελέγχου και ροπών στις αρθρώσεις (1/rad, Άξονες ευστάθειας) |
||||||||||
|
|
Προσέγγιση |
Πλεύση (Μέγ. Βάρος) |
Πλεύση (Ελάχ. Βάρος) |
|||||||
|
|
0 |
0 |
0 |
|||||||
|
|
0.40 |
0.46 |
0.46 |
|||||||
|
|
-0.98 |
-1.24 |
-1.24 |
|||||||
|
|
0 |
0 |
0 |
|||||||
|
|
0.85 |
0.94 |
0.94 |
|||||||
|
|
-2.1 |
-2.5 |
-2.5 |
|||||||
|
|
-0.105 |
-0.132 |
-0.132 |
|||||||
|
|
-0.378 |
-0.476 |
-0.476 |
|||||||
|
Εγκάρσιοι-διεύθυνσης συντελεστές και παράγωγοι ευστάθειας (Αδιάστατοι, Άξονες ευστάθειας) |
||||||||||
|
|
Προσέγγιση |
Πλεύση (Μέγ. Βάρος) |
Πλεύση (Ελάχ. Βάρος) |
|||||||
|
|
-0.173 |
-0.110 |
-0.100 |
|||||||
|
|
-0.390 |
-0.450 |
-0.450 |
|||||||
|
|
0.450 |
0.160 |
0.140 |
|||||||
|
|
-0.730 |
-0.730 |
-0.730 |
|||||||
|
|
0 |
0 |
0 |
|||||||
|
|
0.400 |
0.400 |
0.400 |
|||||||
|
|
0.150 |
0.127 |
0.124 |
|||||||
|
|
0 |
0 |
0 |
|||||||
|
|
-0.130 |
-0.008 |
-0.022 |
|||||||
|
|
-0.260 |
-0.200 |
-0.200 |
|||||||
|
Εγκάρσιοι-διεύθυνσης παράγωγοι ελέγχου και ροπών αρθρώσεων (Αδιάστατοι, Άξονες ευστάθειας) |
||||||||||
|
|
Προσέγγιση |
Πλεύση (Μέγ. Βάρος) |
Πλεύση (Ελάχ. Βάρος) |
|||||||
|
|
0.149 |
0.178 |
0.178 |
|||||||
|
|
0.014 |
0.019 |
0.021 |
|||||||
|
|
0 |
0 |
0 |
|||||||
|
|
0.140 |
0.140 |
0.140 |
|||||||
|
|
-0.050 |
-0.020 |
-0.020 |
|||||||
|
|
-0.074 |
-0.074 |
-0.074 |
|||||||
|
|
- |
- |
- |
|||||||
|
|
- |
- |
- |
|||||||
|
|
- |
- |
- |
|||||||
|
|
- |
- |
- |
|||||||
Θ. Ευρετήριο τεχνικών όρων
Οι υπερσύνδεσμοι παραπέμπουν στην πρώτη αναφορά ή τον ορισμό του αντίστοιχου όρου μέσα στο σύγγραμμα.
|
hook |
|
|
airfoil |
|
|
trailing edge |
|
|
leading edge |
|
|
feedback |
|
|
climb |
|
|
weathercock |
|
|
normal load factor |
|
|
trim |
|
|
upstream |
|
|
decoupled |
|
|
stall |
|
|
autopilot |
|
|
short term |
|
|
loop |
|
|
rate gyroscope (gyro) |
|
|
bank angle |
|
|
heading angle |
|
|
angle of attack |
|
|
longitudinal |
|
|
configuration |
|
|
input vector |
|
|
state vector |
|
|
perturbed |
|
|
directional |
|
|
dynamic stability |
|
|
lateral |
|
|
control input (input signal) |
|
|
engagement |
|
|
amplifier |
|
|
simulation |
|
|
augmented aircraft |
|
|
actuator |
|
|
bandwidth |
|
|
equilibrium |
|
|
camber |
|
|
controller |
|
|
downwash |
|
|
centre of gravity |
|
|
circulation |
|
|
magnitude |
|
|
input matrix |
|
|
state matrix |
|
|
short period |
|
|
steady state flight conditions |
|
|
response shapes |
|
|
mode |
|
|
throttle lever |
|
|
control law |
|
|
dutch roll |
|
|
integrate gyroscope |
|
|
level flight |
|
|
neutral point |
|
|
fin |
|
|
tailplane |
|
|
manoeuvre margin |
|
|
stability margin |
|
|
cockpit |
|
|
sideslip |
|
|
cruise |
|
|
pedal |
|
|
multivariable |
|
|
approach |
|
|
flaps |
|
|
rate |
|
|
servomechanism (servo) |
|
|
signal |
|
|
stagnation point |
|
|
manoeuvre point |
|
|
airframe |
|
|
spiral departure |
|
|
spiral mode |
|
|
attitude |
|
|
static stability |
|
|
vortex |
|
|
coupling |
|
|
break frequency |
|
|
rapid incidence adjustment |
|
|
roll subsidence |
|
|
flight envelope |
|
|
workload |
|
|
phugoid |
|
|
handling qualities |
|
|
controls free |
|
|
controls fixed |
|
|
time lag |
|
|
state space |
Βιβλιογραφία/Αναφορές
|
Γεώργιος Α. Γεωργαντόπουλος & Χρίστινα Γ. Γεωργαντοπούλου, Η Μηχανική Πτήσης του Αεροσκάφους σε ερωτήσεις. Αθήνα, Ελλάδα: Συμεών, 2005. |
|
|
Δημήτριος Σ. Μαθιουλάκης, Ιωάννης Σ. Αναγνωστόπουλος, και Δημήτριος Γ. Τουζόπουλος, "Θεωρία Λεπτών Αεροτομών," σε Βιομηχανική Ρευστομηχανική. Αθήνα: Τμήμα Μηχ. Μηχ., Τομέας Ρευστών, ΕΜΠ, 2006. |
|
|
Michael V. Cook, Flight Dynamics Principles - A Linear Systems Approach to Aircraft Stability and Control, 2nd ed. Oxford, UK: Elsevier Ltd, 2007. |
|
|
Bill Crawford. (2009) Two and Three Dimensional Aerodynamics. |
|
|
Robert C. Nelson, Flight Stability and Automatic Control, 2nd ed. Singapore: WCB/McGraw-Hill, 1998. |
|
|
Bernard Etkin & Lloyd D. Reid, Dynamics of Flight: Stability and Control, 3rd ed. Toronto, Canada: John Wiley & Sons, Inc., 1996. |
|
|
Donald McLean, Automatic Flight Control Systems. Hertfordshire, UK: Prentice Hall International (UK) Ltd, 1990. |
|
|
John H. Blakelock, Automatic Control of Aircraft and Missiles, 2nd ed. New York, NY, USA: John Wiley & Sons, Inc., 1991. |
|
|
Duane T. McRuer, Dunstan Graham & Irving Ashkenas, Aircraft Dynamics and Automatic Control. Princeton, NJ, USA: Princeton Legacy Library, 1974. |
|
|
Νικόλαος Ι. Κρικέλης, Εισαγωγή στον Αυτόματο Έλεγχο. Αθήνα, Ελλάδα: Συμμετρία, 1992. |
|
|
Νικόλαος Ι. Κρικέλης, Μοντελοποίηση & Βέλτιστος Έλεγχος Συστημάτων, 3η εκ. Αθήνα, Ελλάδα: Fountas Books, 2003. |
|
|
Robert K. Heffley & Wayne F. Jewell, "Aircraft Handling Qualities Data", NASA, Hawthorne CA, Contractor Report 1972. |
|
|
Δ. Ροζής, "Επισκόπηση δυναμικών χαρακτηριστικών και χαρακτηριστικών ελέγχου πτήσης αεροσκαφών", ΕΜΠ, Αθήνα, MSc Thesis 2006. |